你有没有发现你已经LV2了
当你知道这个论坛,随便点了个赞或者发了个帖子,就会升LV2
一般来说新号回复四个帖子就能升级lv2
为什么这样设置呢?
因为我们AWOL社区的伙伴主要是中小企业和个人开发者,由于其数量庞大,我们可能难以每一个人都手把手教学开发,所以希望大家都知道我们论坛,有什么问题可以在论坛提问,大家互助解决问题(当然也有工程师巡场
你有没有发现你已经LV2了
当你知道这个论坛,随便点了个赞或者发了个帖子,就会升LV2
一般来说新号回复四个帖子就能升级lv2
为什么这样设置呢?
因为我们AWOL社区的伙伴主要是中小企业和个人开发者,由于其数量庞大,我们可能难以每一个人都手把手教学开发,所以希望大家都知道我们论坛,有什么问题可以在论坛提问,大家互助解决问题(当然也有工程师巡场
@chrisvista 在 全志在线开源芯片 新 SDK 平台下载方法汇总 中说:
大侠,有没有T113-i SDK?
找了很久,没有找到,自己正在V853 SDK基础上,修改
之前没注意,还以为你说T113-S3改T113-i,勉强还能实施。V853上成T113-i ,这跨度太大了,约等于重新适配芯片了,工作量太大,估计你改不动
原来论坛的账号和官网的账号是独立的.
对,之前是共用一个库的,大概2023年6月份之后分成两个了:
(1)在论坛注册的账号属于个人账号,不用签NDA,可以直接下载不涉密的开源的资料;
(2)在全志客户服务平台注册的账号一般是企业账号,下载资料要先签署NDA并开通对应芯片产品包权限,当然这样获取到的资料会更多一些。
@skyshine 在 新 SDK 平台下载 V853 SDK 中说:
请问有D1-H的sdk的获取方式吗
新 SDK 平台下载 D1-H/D1s SDK
https://bbs.aw-ol.com/topic/3947/share/1
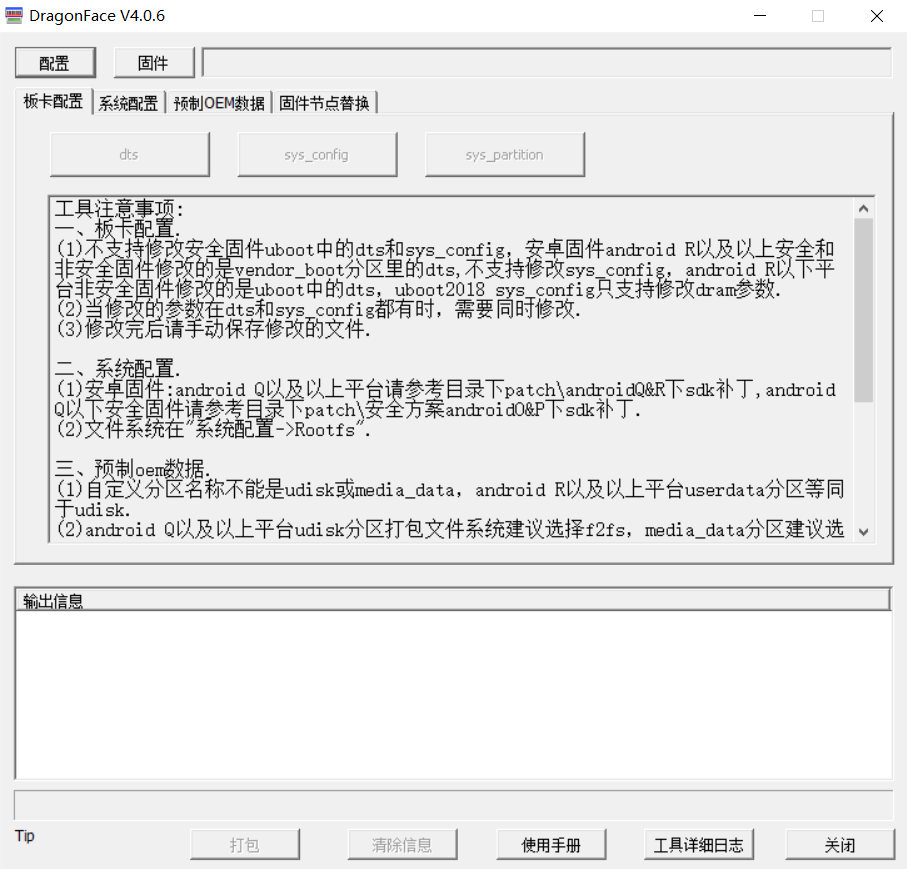
全志神工具:DragonFace——可以动态修改固件的dts、sys_config.fex和分区配置等信息
还能改开机动画、logo、开机音乐等等,免编译调板子、bsp动态调试必备