【XR806开发板试用】驱动总线舵机例程
-
本文转自极术社区:https://aijishu.com/a/1060000000300549
作者:A.0王海智简介
申请到XR806开发板很高兴,因为它可以基于鸿蒙L0系统下开发。在试用中,这个开发板的编译环境的搭建,程序的编写,都走很多的弯路,遇到了很多的坑。编译环境的搭建就用了很长的时间。也谢谢群里的大佬的帮助和极术小姐姐的鼓励,才能完成这次测试。
编译环境
Windows下安装VMware虚拟机,虚拟机中安装Ubuntu20.04.2 64位桌面版。搭建教程是参考的【XR806开发板试用】shell脚本一键配置XR806开发环境。
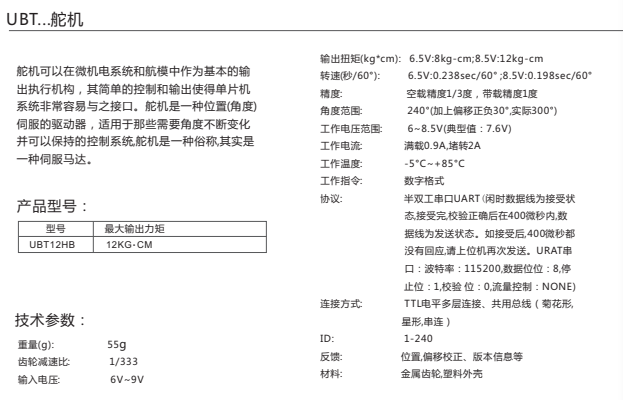
总线舵机说明
总线舵机:

舵机参数说明
总线舵机是通过单线收发串口数据,通过之前做的RT-PI的扩展板实现。电路如图
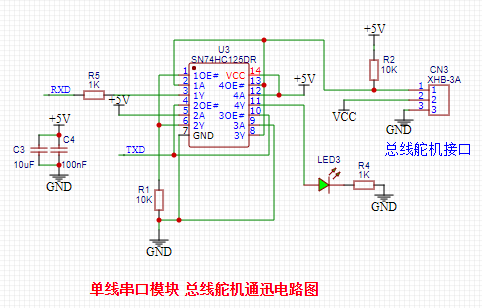
工作原理
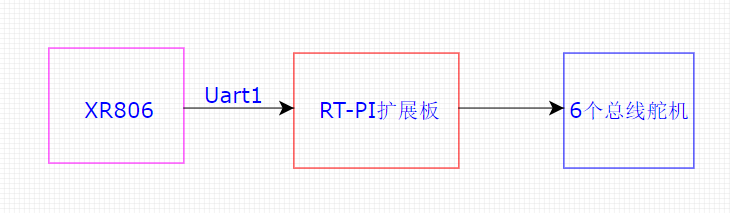
XR806通过UART1串口发送十位十六进制的数据,扩展板将串口数据转换为单线串口和舵机通讯,完成总线舵机的控制。
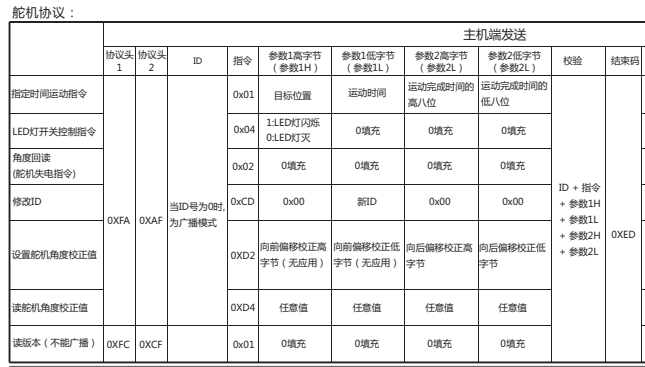
舵机数据协议图
程序说明
程序结构图
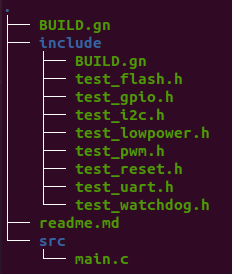
1.ohosdemo文件夹下的BUILD.gn文件group("ohosdemo"){ deps = [ #"TD-LED:app_TDLED", "uart_demo:app_uart", #"LED:app_led", # "hello_demo:app_hello", ] }2.uart_demo文件夹下的BUILD.gn文件
import("//device/xradio/xr806/liteos_m/config.gni") static\_library("app\_uart") { configs = [] sources = [ "src/main.c", #"src/test_flash.c", #"src/test_gpio.c", #"src/test_i2c.c", #"src/test_lowpower.c", #"src/test_pwm.c", #"src/test_reset.c", #"src/test_uart.c", #"src/test_watchdog.c", ] cflags = board\_cflags include\_dirs = board\_include\_dirs include\_dirs += [ "//kernel/liteos_m/kernel/arch/include", "include", "//base/iot_hardware/peripheral/interfaces/kits", ] }3.uart_demo/src/main.c代码如下
#include <stdio.h> #include "ohos\_init.h" #include "kernel/os/os.h" #include <string.h> #include "iot\_uart.h" #include "driver/chip/hal\_uart.h" #define UARTID UART1\_ID #define UART\_BUFFER\_MAXSIZE 50 #define UART\_RECEIVE\_DATALED 30 const uint8\_t play\_Buffer[10] = {0xFA,0xAF,0x00,0x01,0x96,0x00,0x00,0x00,0x97,0xED}; const uint8\_t play\_Buffer1[10] = {0xFA,0xAF,0x00,0x01,0x00,0x00,0x00,0x00,0x01,0xED}; static OS\_Thread\_t g\_main\_thread; static int uart\_init(void) { HAL_Status status = HAL_ERROR; UART_InitParam param; param.baudRate = 115200; // 波特率为115200 param.dataBits = UART_DATA_BITS_8; param.stopBits = UART_STOP_BITS_1; param.parity = UART_PARITY_NONE; param.isAutoHwFlowCtrl = 0; status = HAL_UART_Init(UARTID, ¶m); if (status != HAL_OK) printf("uart init error %d\n", status); return status; } static void MainThread(void \*arg) { unsigned char uart_buffer[UART_BUFFER_MAXSIZE]; uart_init(); while (1) { HAL_UART_Transmit_Poll(UARTID, (uint8_t *)play_Buffer, 10); LOS_Msleep(2000); HAL_UART_Transmit_Poll(UARTID, (uint8_t *)play_Buffer1, 10); LOS_Msleep(2000); } } void UARTMain(void) { printf("UART Test Start\\n"); if (OS\_ThreadCreate(&g\_main\_thread, "MainThread", MainThread, NULL, OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) { printf("[ERR] Create MainThread Failed\n"); } } SYS\_RUN(UARTMain); // Harmony线程入口
Copyright © 2024 深圳全志在线有限公司 粤ICP备2021084185号 粤公网安备44030502007680号