【R128】应用开发案例——中断方式驱动旋转编码器
-
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail

中断方式驱动旋转编码器
本文案例代码 下载地址 中断方式驱动旋转编码器案例代码 https://www.aw-ol.com/downloads?cat=24 旋转编码器是一种位置传感器,可将旋钮的角位置(旋转)转换为用于确定旋钮旋转方向的输出信号。
由于其坚固性和良好的数字控制;它们被用于许多应用中,包括机器人技术,CNC机器和打印机。
旋转编码器有两种类型-绝对式和增量式。绝对编码器为我们提供旋钮的精确位置(以度为单位),而增量编码器报告轴已移动了多少增量。
编码器内部是一个槽形磁盘,该磁盘连接到公共接地引脚C以及两个接触针A和B。旋转旋钮时,A和B根据旋转旋钮的方向以特定顺序与公共接地引脚C接触。
当它们接触公共接地时,它们会产生信号。当一个引脚先于另一引脚接触时,这些信号就会彼此错开90°。这称为正交编码。
顺时针旋转旋钮时,首先连接A引脚,然后连接B引脚。逆时针旋转旋钮时,首先连接B引脚,然后连接A引脚。
通过跟踪每个引脚何时与地面连接或与地面断开,我们可以使用这些信号变化来确定旋钮的旋转方向。您可以通过在A更改状态时观察B的状态来做到这一点。
我们搭建电路,如下:
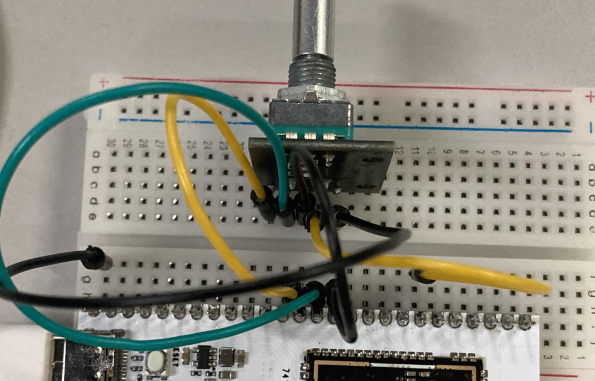
引脚 按键 PA24 编码器 CLK PA25 编码器 DT PA29 编码器 SW(未使用) 载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1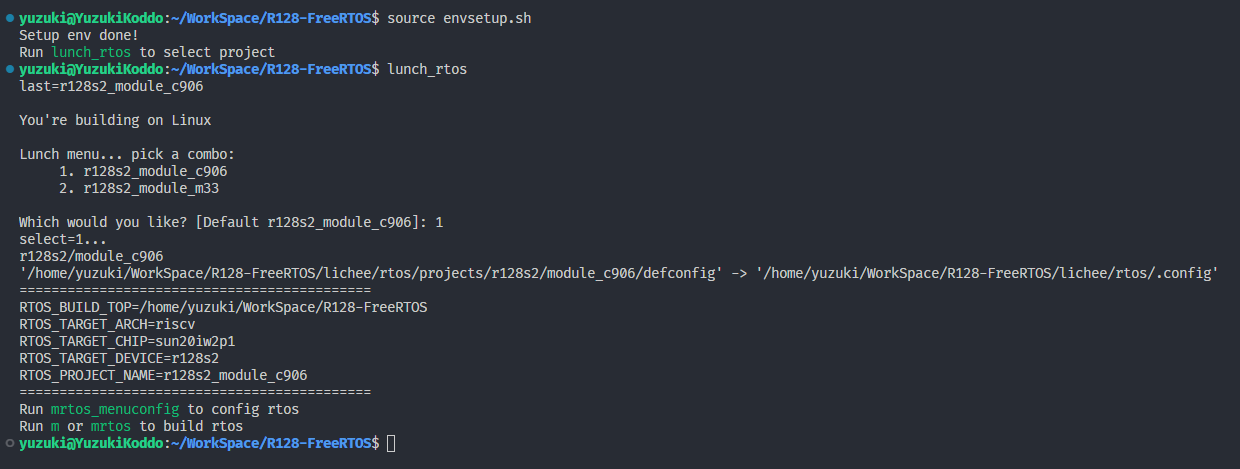
勾选 GPIO 驱动
mrtos_menuconfig找到下列驱动Drivers Options ---> soc related device drivers ---> GPIO devices ---> [*] enable GPIO driver [*] enbale GPIO hal APIs Test command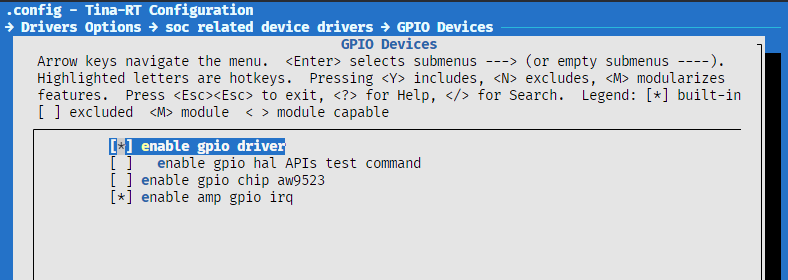
编写程序
打开你喜欢的编辑器,修改文件:
lichee/rtos/projects/r128s2/module_c906/src/main.c
引入头文件
#include <hal_gpio.h>
使用 GPIO 配置引脚
配置 GPIO 的上下拉状态
使用
hal_gpio_set_pull(gpio_pin_t pin, gpio_pull_status_t pull);来设置。这里我们设置PA25引脚为默认上拉状态。hal_gpio_set_pull(GPIOA(25), GPIO_PULL_UP);配置 GPIO 输入输出模式
使用
hal_gpio_set_direction(gpio_pin_t pin, gpio_direction_t direction);来设置 GPIO 的输入输出模式,这里配置为输入模式。hal_gpio_set_direction(GPIOA(25), GPIO_DIRECTION_INPUT);配置 GPIO 的 MUX 功能
GPIO 通常有多种功能,需要配置 MUX 选择需要的功能,使用
hal_gpio_pinmux_set_function(gpio_pin_t pin, gpio_muxsel_t function_index);来设置 GPIO 的复用功能,这里配置为GPIO 输入模式(GPIO_MUXSEL_IN)hal_gpio_pinmux_set_function(GPIOA(25), GPIO_MUXSEL_IN);获取 GPIO 的电平
使用
int hal_gpio_get_data(gpio_pin_t pin, gpio_data_t *data);来获取 GPIO 的电平gpio_data_t gpio_data; hal_gpio_get_data(GPIOA(25), &gpio_data);申请配置中断
使用
hal_gpio_to_irq方法来申请中断号。hal_gpio_irq_request绑定中断服务,hal_gpio_irq_enable启用中断。这里配置一个// 存放中断号 uint32_t irq_clk; // 申请中断号 ret = hal_gpio_to_irq(ENC_CLK, &irq_clk); if (ret < 0){ printf("gpio to irq error, irq num:%d error num: %d\n", irq_clk, ret); } // 绑定中断处理函数 ret = hal_gpio_irq_request(irq_clk, gpio_irq_encode, IRQ_TYPE_EDGE_BOTH, NULL); if (ret < 0){ printf("request irq error, irq num:%d error num: %d\n", irq_clk, ret); } // 启用中断 ret = hal_gpio_irq_enable(irq_clk); if (ret < 0){ printf("request irq error, error num: %d\n", ret); }完整代码
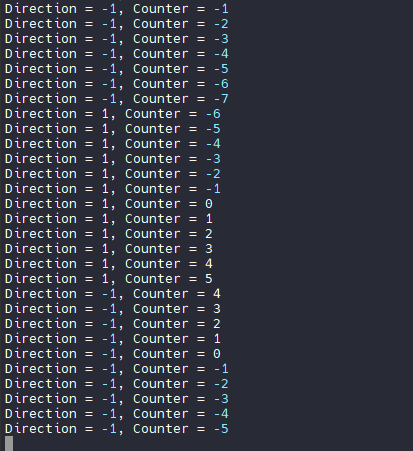
#include <stdio.h> #include <stdint.h> #include <string.h> #include <unistd.h> #include "interrupt.h" #include <portmacro.h> #include <cli_console.h> #include <aw_version.h> #include <hal_time.h> #include <hal_gpio.h> #include "FreeRTOS.h" #include "task.h" #include "tinatest.h" extern int amp_init(void); // 定义旋转编码器的引脚 #define ENC_CLK GPIOA(24) #define ENC_DT GPIOA(25) #define ENC_SW GPIOA(29) // 相关全局变量存储 int encode_counter = 0; int encode_current_clk; int encode_lask_clk; int current_dir = 0; // 编码器中断处理函数 static hal_irqreturn_t gpio_irq_encode(void *data) { // 获取引脚的高低电平状态 gpio_data_t clk_value = GPIO_DATA_LOW; gpio_data_t dt_value = GPIO_DATA_LOW; hal_gpio_get_data(ENC_DT, &dt_value); hal_gpio_get_data(ENC_CLK, &clk_value); // 判断当前数据状态 encode_current_clk = clk_value; if (encode_current_clk != encode_lask_clk && encode_current_clk == 1){ // 判断正反转 if (dt_value != encode_current_clk) { // 正转 encode_counter ++; current_dir = 1; } else { // 反转 encode_counter --; current_dir = -1; } printf("Direction = %d, Counter = %d\n", current_dir, encode_counter); } // 刷新当前状态 encode_lask_clk = encode_current_clk; return 0; } void cpu0_app_entry(void *param) { int ret = 0; // 初始化系统资源 amp_init(); // A24 -> CLK, A25 -> DT. A29 -> SW hal_gpio_set_pull(ENC_CLK, GPIO_PULL_DOWN_DISABLED); hal_gpio_set_direction(ENC_CLK, GPIO_DIRECTION_INPUT); hal_gpio_pinmux_set_function(ENC_CLK, GPIO_MUXSEL_IN); // 获取初始编码器 CLK 状态 gpio_data_t clk_data; hal_gpio_get_data(ENC_CLK, &clk_data); encode_lask_clk = clk_data; hal_gpio_set_pull(ENC_DT, GPIO_PULL_DOWN_DISABLED); hal_gpio_set_direction(ENC_DT, GPIO_DIRECTION_INPUT); hal_gpio_pinmux_set_function(ENC_DT, GPIO_MUXSEL_IN); // 存放 CLK,DT 中断号 uint32_t irq_clk, irq_dt; // 申请 ENC_CLK 为中断引脚,跳变触发 ret = hal_gpio_to_irq(ENC_CLK, &irq_clk); if (ret < 0){ printf("gpio to irq error, irq num:%d error num: %d\n", irq_clk, ret); } // 绑定中断处理函数 ret = hal_gpio_irq_request(irq_clk, gpio_irq_encode, IRQ_TYPE_EDGE_BOTH, NULL); if (ret < 0){ printf("request irq error, irq num:%d error num: %d\n", irq_clk, ret); } // 启用中断 ret = hal_gpio_irq_enable(irq_clk); if (ret < 0){ printf("request irq error, error num: %d\n", ret); } // 申请 ENC_DT 为中断引脚,跳变触发 ret = hal_gpio_to_irq(ENC_DT, &irq_dt); if (ret < 0){ printf("gpio to irq error, irq num:%d error num: %d\n", irq_dt, ret); } // 绑定中断处理函数 ret = hal_gpio_irq_request(irq_dt, gpio_irq_encode, IRQ_TYPE_EDGE_BOTH, NULL); if (ret < 0){ printf("request irq error, irq num:%d error num: %d\n", irq_dt, ret); } // 启用中断 ret = hal_gpio_irq_enable(irq_dt); if (ret < 0){ printf("request irq error, error num: %d\n", ret); } vTaskDelete(NULL); }结果
旋转旋转编码器即可看到计数变化
Copyright © 2024 深圳全志在线有限公司 粤ICP备2021084185号 粤公网安备44030502007680号