XR806开发板驱动6轴MPU6050 陀螺仪+加速度计及数据上传至上位机
-
一.开发环境
- ubuntu16.04虚拟机
- MPU6050陀螺仪
- 匿名上位机
二.软件
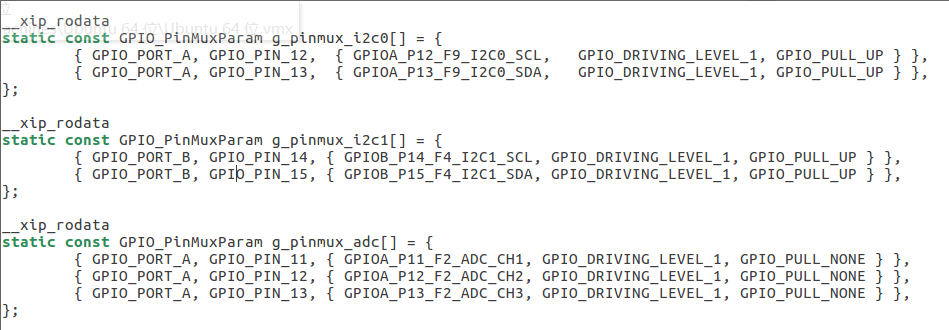
(1).I2C引脚
使用Xr806硬件I2C,需要在文件夹找到“/home/a/xr806_openharmony/device/xradio/xr806/xr_skylark/project/common/board/xr806_OHOS/borad_config.c"板级配置文件,可以看到共有两个I2C端口可用,i2c0和i2c1,这里是使用i2c0,引脚为A12,A13,复用通道F9。找好端口号,插上MPU6050。
(2).12C协议
鸿蒙已自带多种I2C协议,MPU6050需要写寄存器地址,必须选用能写HAL_I2C_Master_Transmit_Mem_IT()函数,写寄存器大小设为8位,但是连续写协议,发送数据长度设为1。(3).上位机协议
1:在调试过程中可以将某些标志位、寄存器、变量实时发回上位机,并在DEBUG页面显示。 2:通讯格式为:0x88 + 0xAD + len + num + DATA + SUM, len为num与DATA的总长度,num表示要改变哪个显示 状态,例如num=0x01即是要改变第一个LED,num=0x07即是改变第一个数字输出显示。当要改变LED时, DATA只需一字节,DATA=0x00表示关闭LED,大于0x00表示点亮LED;当要改变数字输出时,DATA需要两字 节, 表示 一个uint16数字,高字节在前。SUM为从0x88开始到SUM前一字节的和校验,uint8格式。 例如:发送 0x88 + 0xAD + 0x02 + 0x01 + 0x01 + 0x39 表示点亮第一个LED 发送 0x88 + 0xAD + 0x03 + 0x07 + 0x00 + 0x05 + 0x44 表示在第一个数字输出位置显示 5 。3.源码
#include <stdio.h> #include "ohos_init.h" #include "kernel/os/os.h" #include "/home/zfy/xr806_openharmony/base/iot_hardware/peripheral/interfaces/kits/iot_gpio.h" //(8) #include "driver/chip/hal_i2c.h" static OS_Thread_t g_main_thread,g_main_thread2; #define GPIO_ID_PA21 21 #define I2C_SPEED (200000) #define SMPLRT_DIV 0x19 #define CONFIG 0x1A #define GYRO_CONFIG 0x1B #define ACCEL_CONFIG 0x1C #define ACCEL_XOUT_H 0x3B #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40 #define TEMP_OUT_H 0x41 #define TEMP_OUT_L 0x42 #define GYRO_XOUT_H 0x43 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48 #define PWR_MGMT_1 0x6B #define WHO_AM_I 0x75 #define SlaveAddress 0x68 unsigned int i2c_id = 0; void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short p,short r,short y) { char str_buff[5]; unsigned char head_buff[]={0x88,0xAF,0x1C}; unsigned char end_buff[]={0x00,0x00,0x00,0x00}; unsigned char check_sum[1]={0}; unsigned char data[24]; check_sum[0]+=0x88+0xAF+0x1C; data[0]=aacx>>8&0xFF; data[1]=aacx&0xFF; data[2]=aacy>>8&0xFF; data[3]=aacy&0xFF; data[4]=aacz>>8&0xFF; data[5]=aacz&0xFF; data[6]=gyrox>>8&0xFF; data[7]=gyrox&0xFF; data[8]=gyroy>>8&0xFF; data[9]=gyroy&0xFF; data[10]=gyroz>>8&0xFF; data[11]=gyroz&0xFF; data[12]=0; data[13]=0; data[14]=0; data[15]=0; data[16]=0; data[17]=0; data[18]=r>>8&0xFF; data[19]=r&0xFF; data[20]=p>>8&0xFF; data[21]=p; data[22]=y>>8&0xFF; data[23]=y&0xFF; int i=0; for(i=0;i<24;i++){ check_sum[0]+=data[i]; } // printf("%s",head_buff); // printf("%s",data); // printf("%s",end_buff); // printf("%s",check_sum); for(int i=0;i<3;i++){ printf("%c",head_buff[i]);} for(int i=0;i<24;i++){ printf("%c",data[i]);} for(int i=0;i<4;i++){ printf("%c",end_buff[i]);} for(int i=0;i<1;i++){ printf("%c",check_sum[i]);} //uart_send_str(data,24); } short Acc[3],Gyro[3]; void GetData(unsigned char REG_Address,short data[3]) { unsigned char H[1]={0},L[1]={0}; //HAL_I2C_Master_Receive_Mem_IT(i2c_id, SlaveAddress, REG_Address+1, I2C_MEMADDR_SIZE_16BIT, L, 1); //return ((int)(H[0]<<8)+L[0]); for(int i=0;i<3;i++){ HAL_I2C_Master_Receive_Mem_IT(i2c_id, SlaveAddress, REG_Address+(i*2), I2C_MEMADDR_SIZE_8BIT, H, 1); HAL_I2C_Master_Receive_Mem_IT(i2c_id, SlaveAddress, REG_Address+(i*2+1), I2C_MEMADDR_SIZE_8BIT, L, 1); data[i]=(( short)(H[0]<<8))|L[0]; } } static void MainThread2(void *arg) { printf("LED test start\r\n"); IoTGpioInit(GPIO_ID_PA21); IoTGpioSetDir(GPIO_ID_PA21, IOT_GPIO_DIR_OUT); IoTI2cInit(i2c_id,I2C_SPEED); const unsigned char data[]={0x00}; const unsigned char data1[]={0x07}; const unsigned char data2[]={0x06}; const unsigned char data3[]={0x18}; const unsigned char data4[]={0x01}; printf("i2c test start\r\n"); int a=HAL_I2C_Master_Transmit_Mem_IT(i2c_id, SlaveAddress, PWR_MGMT_1, I2C_MEMADDR_SIZE_8BIT, data, 1); HAL_I2C_Master_Transmit_Mem_IT(i2c_id, SlaveAddress, PWR_MGMT_1, I2C_MEMADDR_SIZE_8BIT, data1, 1); OS_MSleep(1); HAL_I2C_Master_Transmit_Mem_IT(i2c_id, SlaveAddress, SMPLRT_DIV, I2C_MEMADDR_SIZE_8BIT, data2, 1); OS_MSleep(1); HAL_I2C_Master_Transmit_Mem_IT(i2c_id, SlaveAddress, GYRO_CONFIG, I2C_MEMADDR_SIZE_8BIT, data3, 1); OS_MSleep(1); HAL_I2C_Master_Transmit_Mem_IT(i2c_id, SlaveAddress, ACCEL_CONFIG, I2C_MEMADDR_SIZE_8BIT, data4, 1); OS_MSleep(1); while (1) { IoTGpioSetOutputVal(GPIO_ID_PA21, 1); OS_MSleep(10); IoTGpioSetOutputVal(GPIO_ID_PA21, 0); OS_MSleep(10); GetData(ACCEL_XOUT_H,Acc); GetData(GYRO_XOUT_H,Gyro); GetData(GYRO_XOUT_H,Gyro); mpu6050_send_data(Acc[0],Acc[1],Acc[2],Gyro[0],Gyro[1],Gyro[2],0,0,0); } } void LEDMain(void) { printf("LED Test Start\n"); if (OS_ThreadCreate(&g_main_thread2, "MainThread2", MainThread2, NULL, OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) { printf("[ERR] Create MainThread Failed\n"); } } static void MainThread(void *arg) {int i=0; while (1) { printf("hello world:%d\n",i); LOS_Msleep(1000); i++; } } void HelloTestMain(void) { printf("Wifi Test Start\n"); if (OS_ThreadCreate(&g_main_thread, "MainThread", MainThread, NULL, OS_THREAD_PRIO_APP, 4 * 1024) != OS_OK) { printf("[ERR] Create MainThread Failed\n"); } } //SYS_RUN(HelloTestMain); SYS_RUN(LEDMain);三、效果
文章转自极术社区:https://aijishu.com/a/1060000000288462
作者:zhai
Copyright © 2024 深圳全志在线有限公司 粤ICP备2021084185号 粤公网安备44030502007680号