【XR806开发板试用】基于XR806实现智能小车
-
一、实验功能:
1、 基于XR806实现WIFI连接路由器
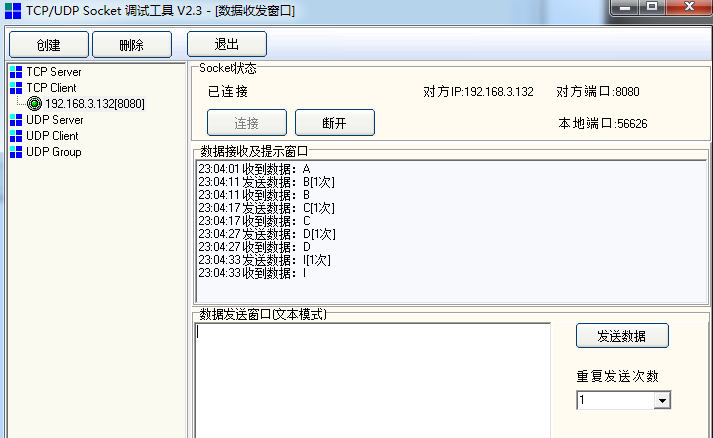
2、 XR806设备创建TCP socket服务器,局域网内通过PC端TCP客服端连接XR806 TCP服务器进行指令控制小车运行(指令A:前进、B:后退、C:左转、D:右转、I:停止)。
3、 小车行进由GPIO控制电机转动,行进速度通过XR806硬件定时器实现GPIO的PWM脉宽调制来控制小车行进速度。
4、 创建双线程实现智能小车,一个线程负责小车运行,一个线程主要用于TCP socket服务器完成与TCP客服端的指令收发。
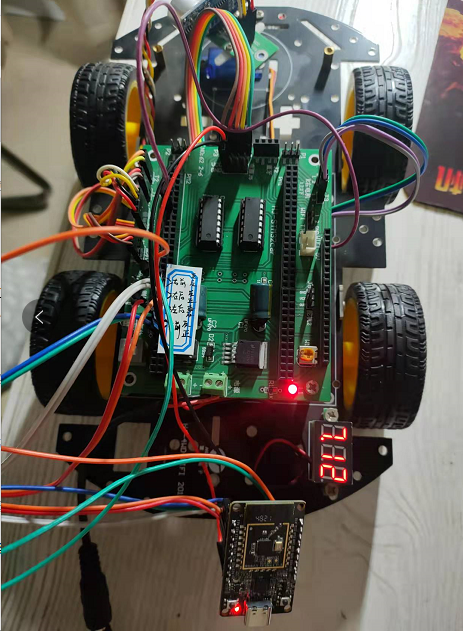
实物图:
二、开发环境安装配置
开发环境安装配置参考https://aijishu.com/a/1060000000291606博文,实现基于优麒麟ubuntukylin-20.04,使用的OpenHarmony代码版本是1.0.1_release。鸿蒙系统固件烧录参考了下面这个贴子:
https://aijishu.com/a/1060000000287250 全志 XR806 OpenHarmony 鸿蒙系统固件烧录。
tcp socket通信参考帖子:
https://aijishu.com/a/1060000000286948 【XR806开发板试用】xr806使用tcp socket与手机通信三、硬件连接电路
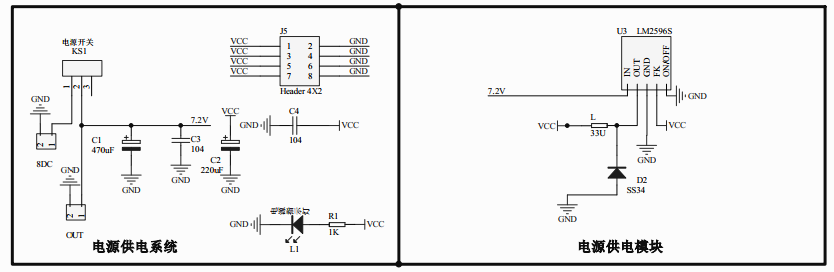
小车驱动板电路图
电源电路:输入7.2V-12V电源,通过LM2596S稳压IC输出5V电源
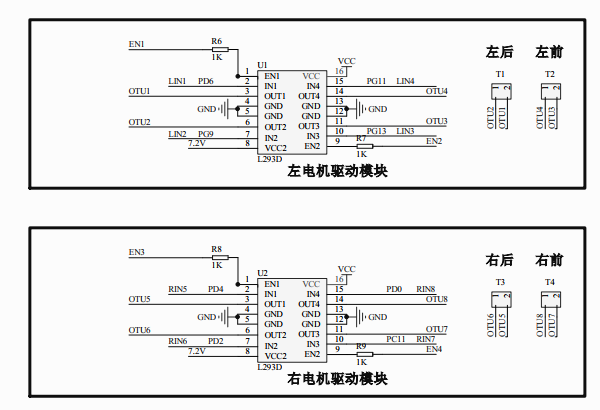
车轮驱动电路,采用L293芯片驱动电机。EN使能默认悬空为高电平,只需控制电机的GPIO口输出高低电平即可实现车轮的转动,如车轮电机T1,控制GPIO口为PD
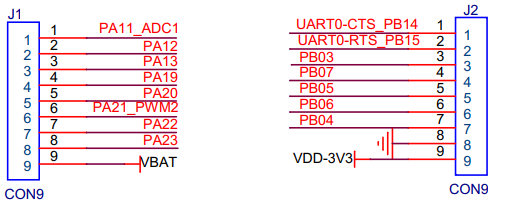
XR806开发板接口图如下:
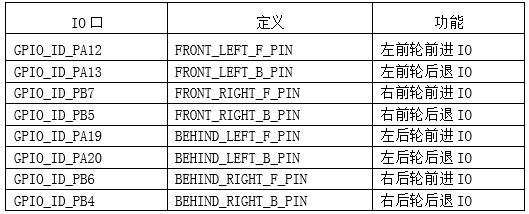
电机控制信号与XR806开发板IO口定义:
四、项目实现
参考了官方的点灯教程
创建工程
在device/xradio/xr806/ohosdemo中新建一个文件夹,并命令为smart_car。
在文件夹中新建文件~/share/XR806/openharmony/device/xradio/xr806/ohosdemo/smart_car$ tree -L 2 . ├── BUILD.gn └── smart_car ├── BUILD.gn └── main.c ├── motor.h └── motor.c ├── tcp_net_socket.h └── tcp_net_socket.c`修改device/xradio/xr806/ohosdemo/smart_car/BUILD.gn
import("//device/xradio/xr806/liteos_m/config.gni") static_library("app_smart_car") { configs = [] sources = [ "src/main.c", "src/tcp_net_socket.c", "src/motor.c", ] cflags = board_cflags include_dirs = board_include_dirs include_dirs += [ "//kernel/liteos_m/kernel/arch/include", "//base/iot_hardware/peripheral/interfaces/kits", "//utils/native/lite/include", "//foundation/communication/wifi_lite/interfaces/wifiservice", "//third_party/lwip/src/include", "//third_party/cJSON", ] }电机控制信号与XR806开发板IO口定义:
#define GPIO_ID_PA11 11 #define GPIO_ID_PA12 12 #define GPIO_ID_PA13 13 #define GPIO_ID_PA19 19 #define GPIO_ID_PA20 20 #define GPIO_ID_PA21 21 #define GPIO_ID_PA22 22 #define GPIO_ID_PA23 23 #define GPIO_ID_PB3 27 #define GPIO_ID_PB4 28 #define GPIO_ID_PB5 29 #define GPIO_ID_PB6 30 #define GPIO_ID_PB7 31 #define GPIO_ID_PB14 38 #define GPIO_ID_PB15 39 #define FRONT_LEFT_F_PIN GPIO_ID_PA12 #define FRONT_LEFT_F_SET IoTGpioSetOutputVal(FRONT_LEFT_F_PIN,1); #define FRONT_LEFT_F_RESET IoTGpioSetOutputVal(FRONT_LEFT_F_PIN,0); #define FRONT_LEFT_B_PIN GPIO_ID_PA13 #define FRONT_LEFT_B_SET IoTGpioSetOutputVal(FRONT_LEFT_B_PIN,1); #define FRONT_LEFT_B_RESET IoTGpioSetOutputVal(FRONT_LEFT_B_PIN,0); #define FRONT_RIGHT_F_PIN GPIO_ID_PB7 #define FRONT_RIGHT_F_SET IoTGpioSetOutputVal(FRONT_RIGHT_F_PIN,1); #define FRONT_RIGHT_F_RESET IoTGpioSetOutputVal(FRONT_RIGHT_F_PIN,0); #define FRONT_RIGHT_B_PIN GPIO_ID_PB5 #define FRONT_RIGHT_B_SET IoTGpioSetOutputVal(FRONT_RIGHT_B_PIN,1); #define FRONT_RIGHT_B_RESET IoTGpioSetOutputVal(FRONT_RIGHT_B_PIN,0); #define BEHIND_LEFT_F_PIN GPIO_ID_PA19 #define BEHIND_LEFT_F_SET IoTGpioSetOutputVal(BEHIND_LEFT_F_PIN,1); #define BEHIND_LEFT_F_RESET IoTGpioSetOutputVal(BEHIND_LEFT_F_PIN,0); #define BEHIND_LEFT_B_PIN GPIO_ID_PA20 #define BEHIND_LEFT_B_SET IoTGpioSetOutputVal(BEHIND_LEFT_B_PIN,1); #define BEHIND_LEFT_B_RESET IoTGpioSetOutputVal(BEHIND_LEFT_B_PIN,0); #define BEHIND_RIGHT_F_PIN GPIO_ID_PB6 #define BEHIND_RIGHT_F_SET IoTGpioSetOutputVal(BEHIND_RIGHT_F_PIN,1); #define BEHIND_RIGHT_F_RESET IoTGpioSetOutputVal(BEHIND_RIGHT_F_PIN,0); #define BEHIND_RIGHT_B_PIN GPIO_ID_PB4 #define BEHIND_RIGHT_B_SET IoTGpioSetOutputVal(BEHIND_RIGHT_B_PIN,1); #define BEHIND_RIGHT_B_RESET IoTGpioSetOutputVal(BEHIND_RIGHT_B_PIN,0);小车电机驱动配置
//左前 #define FRONT_LEFT_GO FRONT_LEFT_F_SET; FRONT_LEFT_B_RESET//前进 #define FRONT_LEFT_BACK FRONT_LEFT_F_RESET; FRONT_LEFT_B_SET//后退 #define FRONT_LEFT_STOP FRONT_LEFT_F_RESET; FRONT_LEFT_B_RESET//停止 //右前 #define FRONT_RIGHT_GO FRONT_RIGHT_F_SET; FRONT_RIGHT_B_RESET #define FRONT_RIGHT_BACK FRONT_RIGHT_F_RESET;FRONT_RIGHT_B_SET #define FRONT_RIGHT_STOP FRONT_RIGHT_F_RESET;FRONT_RIGHT_B_RESET //左后 #define BEHIND_LEFT_GO BEHIND_LEFT_F_SET;BEHIND_LEFT_B_RESET #define BEHIND_LEFT_BACK BEHIND_LEFT_F_RESET;BEHIND_LEFT_B_SET #define BEHIND_LEFT_STOP BEHIND_LEFT_F_RESET;BEHIND_LEFT_B_RESET //右后 #define BEHIND_RIGHT_GO BEHIND_RIGHT_F_SET;BEHIND_RIGHT_B_RESET #define BEHIND_RIGHT_BACK BEHIND_RIGHT_F_RESET;BEHIND_RIGHT_B_SET #define BEHIND_RIGHT_STOP BEHIND_RIGHT_F_RESET;BEHIND_RIGHT_B_RESET //全局变量定义 #define SPEED_DUTY 40//默认占空比 按1ms最小分辨率 周期50ms计算 unsigned int speed_count=0;//占空比计数器 50次一周期 char front_left_speed_duty=SPEED_DUTY; char front_right_speed_duty=SPEED_DUTY; char behind_left_speed_duty=SPEED_DUTY; char behind_right_speed_duty=SPEED_DUTY;定时器实现小车PWM控制
void timer_callback(void *arg) { /*sec_count++; printf(" timer irq: %d\n\r", sec_count); IoTGpioSetOutputVal(11, sec_count%2);*/ tick_1ms++; if(tick_1ms >= 10) { tick_1ms = 0; speed_count++; tick_5ms++; if(speed_count >= 50) { speed_count = 0; } CarMove(); } } int timer_init(void) { HAL_Status status = HAL_ERROR; TIMER_InitParam param; param.arg = NULL; param.callback = timer_callback; param.cfg = HAL_TIMER_MakeInitCfg(TIMER_MODE_REPEAT, /*timer mode*/ TIMER_CLK_SRC_HFCLK, /*HFCLOCK*/ TIMER_CLK_PRESCALER_4); /*CLK_PRESCALER*/ param.isEnableIRQ = 1; param.period = COUNT_TIME * (HFCLOCK / CLK_PRESCALER); status = HAL_TIMER_Init(TIMERID, ¶m); if (status != HAL_OK) printf("timer int error %d\n", status); return status; }小车前进函数,根据占空比驱动电机转动
void CarMove(void) { //左前轮 if(front_left_speed_duty > 0)//向前 { if(speed_count < front_left_speed_duty) { FRONT_LEFT_GO; }else { FRONT_LEFT_STOP; } } else if(front_left_speed_duty < 0)//向后 { if(speed_count < (-1)*front_left_speed_duty) { FRONT_LEFT_BACK; }else { FRONT_LEFT_STOP; } } else //停止 { FRONT_LEFT_STOP; } //右前轮 if(front_right_speed_duty > 0)//向前 { if(speed_count < front_right_speed_duty) { FRONT_RIGHT_GO; }else //停止 { FRONT_RIGHT_STOP; } } else if(front_right_speed_duty < 0)//向后 { if(speed_count < (-1)*front_right_speed_duty) { FRONT_RIGHT_BACK; }else //停止 { FRONT_RIGHT_STOP; } } else //停止 { FRONT_RIGHT_STOP; } //左后轮 if(behind_left_speed_duty > 0)//向前 { if(speed_count < behind_left_speed_duty) { BEHIND_LEFT_GO; } else //停止 { BEHIND_LEFT_STOP; } } else if(behind_left_speed_duty < 0)//向后 { if(speed_count < (-1)*behind_left_speed_duty) { BEHIND_LEFT_BACK; } else //停止 { BEHIND_LEFT_STOP; } } else //停止 { BEHIND_LEFT_STOP; } //右后轮 if(behind_right_speed_duty > 0)//向前 { if(speed_count < behind_right_speed_duty) { BEHIND_RIGHT_GO; } else //停止 { BEHIND_RIGHT_STOP; } } else if(behind_right_speed_duty < 0)//向后 { if(speed_count < (-1)*behind_right_speed_duty) { BEHIND_RIGHT_BACK; } else //停止 { BEHIND_RIGHT_STOP; } } else //停止 { BEHIND_RIGHT_STOP; } } //向前 void CarGo(void) { front_left_speed_duty=25;//SPEED_DUTY 50 front_right_speed_duty=25; behind_left_speed_duty=25; behind_right_speed_duty=25; } //后退 void CarBack(void) { front_left_speed_duty=-50;//SPEED_DUTY front_right_speed_duty=-50; behind_left_speed_duty=-50; behind_right_speed_duty=-50; } //向左 void CarLeft(void) { front_left_speed_duty=-20; front_right_speed_duty=SPEED_DUTY; behind_left_speed_duty=-20; behind_right_speed_duty=SPEED_DUTY+10;//增加后轮驱动力 } //向右 void CarRight(void) { front_left_speed_duty=SPEED_DUTY; front_right_speed_duty=-20; behind_left_speed_duty=SPEED_DUTY+10;//增加后轮驱动力 behind_right_speed_duty=-20; } //停止 void CarStop(void) { front_left_speed_duty=0; front_right_speed_duty=0; behind_left_speed_duty=0; behind_right_speed_duty=0; }项目编译
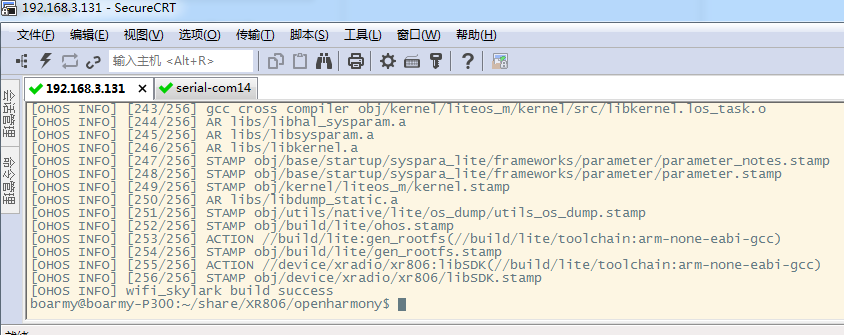
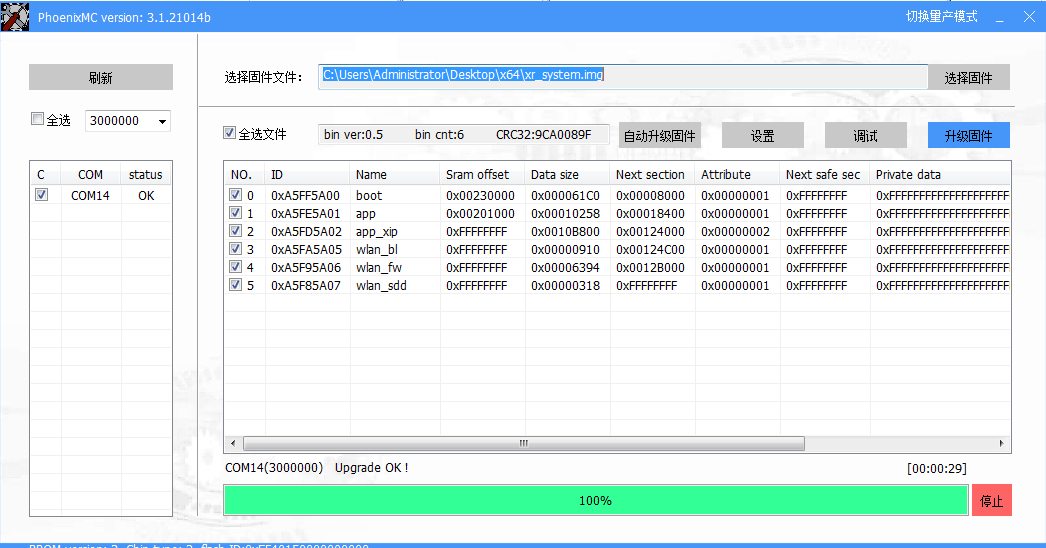
下载固件
device\xradio\xr806\xr_skylark\out\xr_system.img
PC端TCP客服端边连接小车下发指令。
小车指令接收串口打印
五、碰到问题
编译报数据溢出错误:[OHOS ERROR] chmod 777 ../../../../../tools/mkimage && ../../../../../tools/mkimage -c .image.cfg -o xr_system.img [OHOS ERROR] err: bin 1 and bin 2 were overlaped! [OHOS ERROR] Overlapped size: 1024 Byte(1kB) [OHOS ERROR] bin 1 name:app.bin begin: 0x00008000 end: 0x00018000 [OHOS ERROR] bin 2 name:app_xip.bin begin: 0x00017C00 [OHOS ERROR] [OHOS ERROR] We've rearranged bin files and generated new cfg file 'image_auto_cal.cfg', the new one is recommended. [OHOS ERROR] Generate image file failed [OHOS ERROR] cfg string: [OHOS ERROR] /* [OHOS ERROR] * [OHOS ERROR] * Automatically generated file; DO NOT EDIT. [OHOS ERROR] * XR806 SDK Configuration [OHOS ERROR] * [OHOS ERROR] */ [OHOS ERROR] { [OHOS ERROR] "magic" : "AWIH", [OHOS ERROR] "version" : "0.5", [OHOS ERROR] "image" : {"max_size": "1532K"}, [OHOS ERROR] "section" :[ [OHOS ERROR] {"id": "0xa5ff5a00", "bin" :"boot_40M.bin", "cert": "null", "flash_offs": "0K", "sram_offs": "0x00230000", "ep": "0x00230101", "attr":"0x1"}, [OHOS ERROR] {"id": "0xa5fe5a01", "bin" :"app.bin", "cert": "null", "flash_offs": "32K", "sram_offs": "0x00201000", "ep": "0x00201101", "attr":"0x1"}, [OHOS ERROR] {"id": "0xa5fd5a02", "bin" :"app_xip.bin", "cert": "null", "flash_offs": "95K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x2"}, [OHOS ERROR] {"id": "0xa5fa5a05", "bin" :"wlan_bl.bin", "cert": "null", "flash_offs": "1166K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, [OHOS ERROR] {"id": "0xa5f95a06", "bin" :"wlan_fw.bin", "cert": "null", "flash_offs": "1169K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, [OHOS ERROR] {"id": "0xa5f85a07", "bin" :"sys_sdd_40M.bin", "cert": "null", "flash_offs": "1194K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, [OHOS ERROR] {} [OHOS ERROR] ] [OHOS ERROR] }查找出错点:
openharmony$ grep "1532K" device/xradio/xr806/xr_skylark/project -rndevice/xradio/xr806/xr_skylark/project/example/audio_play/image/xr806/image.cfg:6: "image" : {"max_size": "1532K", "xz_max_size": "1200K"}, device/xradio/xr806/xr_skylark/project/example/audio_play/image/xr806/image.cfg:8: "image" : {"max_size": "1532K"}, device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806/image.cfg:4: "image" : {"max_size": "1532K"}, device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806/image_auto_cal.cfg:10: "image" : {"max_size": "1532K"}, device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806/.image.cfg:10: "image" : {"max_size": "1532K"},XR806/openharmony/device/xradio/xr806/xr_skylark/project/demo/audio_demo/image/xr806$ ls -l
总用量 2404 -rwxrwxr-x 1 boarmy boarmy 64456 1月 17 20:01 app.bin -rwxrwxr-x 1 boarmy boarmy 1095680 1月 17 20:01 app_xip.bin -rwxrwxr-x 1 boarmy boarmy 25024 1月 17 20:01 boot_40M.bin -rw-rw-r-- 1 boarmy boarmy 1067 1月 17 20:01 image_auto_cal.cfg -rwxrwxr-x 1 boarmy boarmy 982 1月 9 12:51 image.cfg -rwxrwxr-x 1 boarmy boarmy 792 1月 17 20:01 sys_sdd_40M.bin -rwxrwxr-x 1 boarmy boarmy 2320 1月 17 20:01 wlan_bl.bin -rwxrwxr-x 1 boarmy boarmy 25492 1月 17 20:01 wlan_fw.bin -rw-rw-r-- 1 boarmy boarmy 1223512 1月 17 19:51 xr_system.img可找到image.cfg
{ "magic" : "AWIH", "version" : "0.5", "image" : {"max_size": "1532K"}, "section" :[ {"id": "0xa5ff5a00", "bin" :"boot_40M.bin", "cert": "null", "flash_offs": "0K", "sram_offs": "0x00230000", "ep": "0x00230101", "attr":"0x1"}, {"id": "0xa5fe5a01", "bin" :"app.bin", "cert": "null", "flash_offs": "32K", "sram_offs": "0x00201000", "ep": "0x00201101", "attr":"0x1"}, {"id": "0xa5fd5a02", "bin" :"app_xip.bin", "cert": "null", "flash_offs": "95K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x2"}, {"id": "0xa5fa5a05", "bin" :"wlan_bl.bin", "cert": "null", "flash_offs": "1166K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {"id": "0xa5f95a06", "bin" :"wlan_fw.bin", "cert": "null", "flash_offs": "1169K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {"id": "0xa5f85a07", "bin" :"sys_sdd_40M.bin", "cert": "null", "flash_offs": "1194K", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {} ] }将image.cfg修改为:
{ "magic" : "AWIH", "version" : "0.5", "image" : {"max_size": "1532K"}, "section" :[ {"id": "0xa5ff5a00", "bin" :"boot_40M.bin", "cert": "null", "flash_offs": "0K", "sram_offs": "0x00230000", "ep": "0x00230101", "attr":"0x1"}, {"id": "0xa5fe5a01", "bin" :"app.bin", "cert": "null", "flash_offs": "32K", "sram_offs": "0x00201000", "ep": "0x00201101", "attr":"0x1"}, {"id": "0xa5fd5a02", "bin" :"app_xip.bin", "cert": "null", "flash_offs": "", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x2"}, {"id": "0xa5fa5a05", "bin" :"wlan_bl.bin", "cert": "null", "flash_offs": "", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {"id": "0xa5f95a06", "bin" :"wlan_fw.bin", "cert": "null", "flash_offs": "", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {"id": "0xa5f85a07", "bin" :"sys_sdd_40M.bin", "cert": "null", "flash_offs": "", "sram_offs": "0xffffffff", "ep": "0xffffffff", "attr":"0x1"}, {} ] }flash_offs - 该段bin文件存放在 FLASH 中的位置偏移,若不填写,则软件自动放在上一个文件结束的位置,以1024 byte对齐。问题解决。
Copyright © 2024 深圳全志在线有限公司 粤ICP备2021084185号 粤公网安备44030502007680号