@q1215200171 这个 SDK 和签了 NDA 在全志客户服务平台的 SDK 是一致的吗?
D
dream 发布的最佳帖子
-
【分析笔记】Linux I2C-Tools 使用踩坑笔记发布在 Linux
一、踩坑缘由
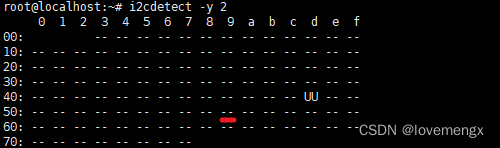
在调试 I2C 器件时,我一般习惯于使用 i2cdetect 工具来确认芯片是否有应答,通常有应答之后,就会开始着手移植或者编写对应的驱动程序,但是在调试 sgp41 传感器时却不灵了。
二、问题现象
在连续完成多个 I2C 器件的调试和驱动开发之后,最后一个 sgp41 传感器却一直无法被检测到。在使用示波器再次测量芯片供电、检查I2C波形、引脚顺序、电平匹配都正确后,认为是芯片坏了,换了多颗芯片,都无法识别,寄给供应商,供应商又说检测良好,这就很神奇了。
在同一个座子上,sht41 都能正常被检测到,但是 sgp41 却无法检测,更何况该总线上还挂了其它的 I2C 器件都能准确检测出来。
三、问题分析
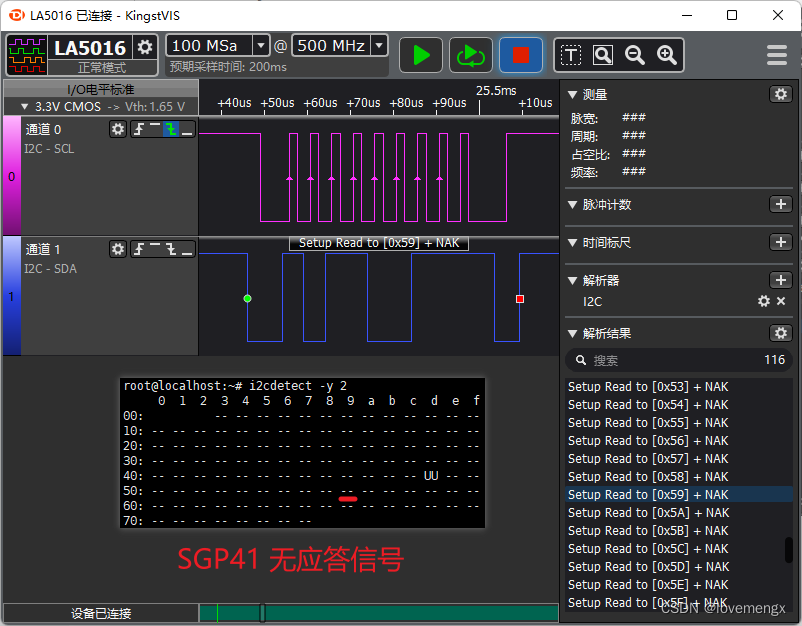
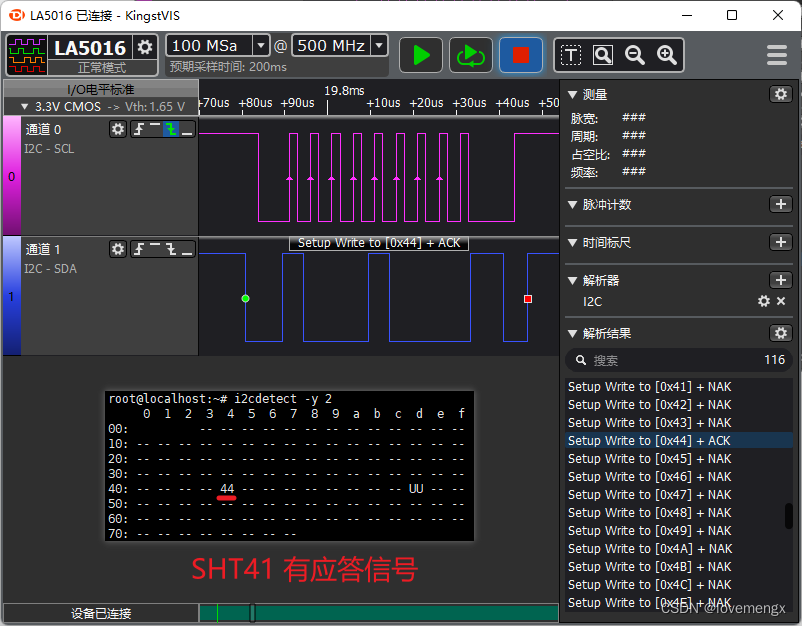
百思不得其解,在仔细观察逻辑分析仪解析的结果,发现在检测 0x44(sht41) 器件地址的时候,i2cdetect 使用的是采用写的方式检测,而检测 0x59(sgp41) 器件地址时,采用读的方式检测。
由于之前调试过 sht41 器件,知道这类传感器需要先写再读,才会有应答信号(规格书没有体现出来),因此推测跟这个有关。手写了一个 I2C 设备驱动,先写再读取,发现可以正常通信,证实了我的猜测。
四、深入分析
我特别好奇的是,为什么 i2cdetect 工具会对不同的地址段采用不同的方式进行检测,我分析了 i2cdetect.c 源代码,发现默认是以自动模式检测,而自动模式则会根据不同的地址段采取读或写来实现检测。
源码下载:http://mirrors.edge.kernel.org/pub/software/utils/i2c-tools/i2c-tools-4.0.tar.gz
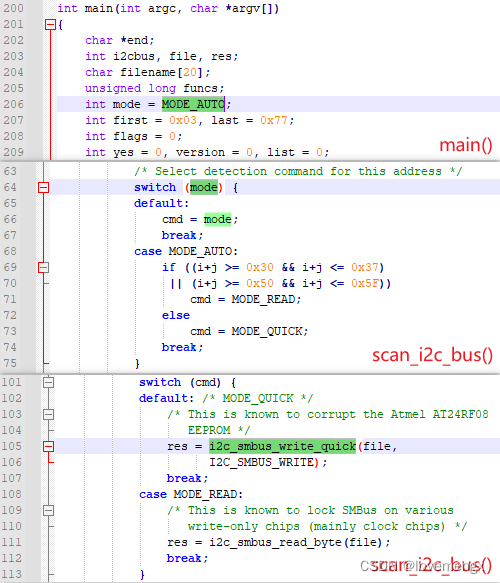
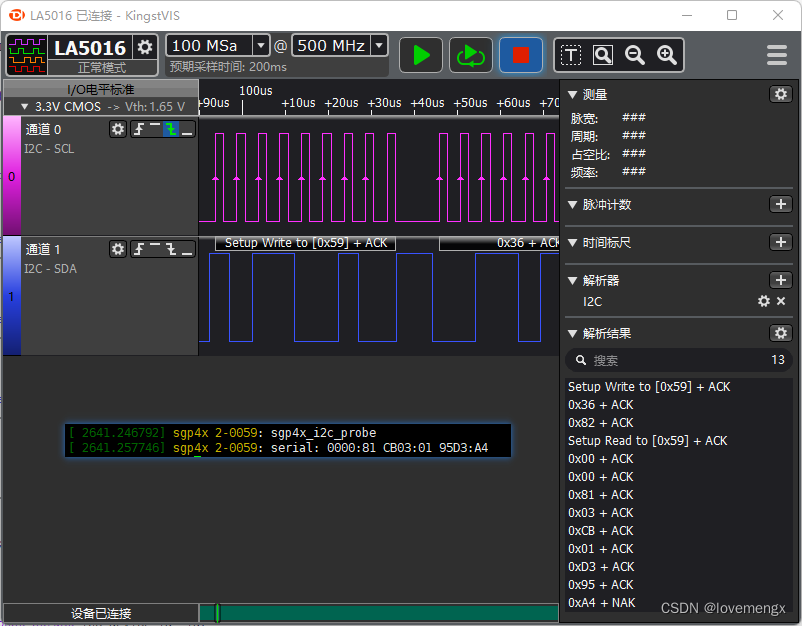
如果需要检测类似 sht41、sgp41 这种必须要先写再读才会有应答的芯片,就必须要指定检测模式为写检测(MODE_QUICK),由于 sht41 的器件地址 0x44 恰好在自动模式中以写的方式检测,因此可以检测得到。通过分析源码发现,-r 和 -q 即可指定读写模式:

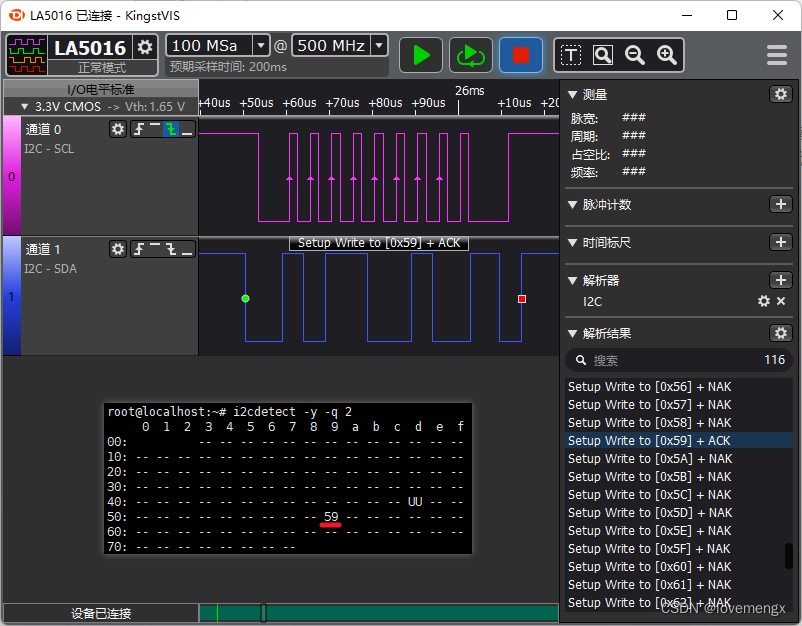
下图为指定以写的方式检测 sgp41(0x59),可以发现有应答信号,被检测出来了:
五、经验总结
- 不是所有的 I2C 器件都会直接响应读请求。
- 使用 i2cdetect 工具检测芯片,建议使用 -q 和 -r 参数都试试。
-
【分析笔记】全志 T507 PF4 引脚无法被正常设置为中断模式的问题分析发布在 其它全志芯片讨论区
相关信息
硬件平台:全志T507
系统版本:Android 10 / Linux 4.9.170
问题描述:PF4 无法通过标准接口设置为中断模式,而 PF1、PF2、PF3、PF5 正常可用。分析过程
一开始以为是引脚被其它驱动占用引起,或者该引脚不具备中断功能,经过排查,已排除这两种可能,因此通过从源码分析来找问题的根因。
以下是以 gpio_keys.c 驱动为入口进行分析:
// drivers/input/keyboard/gpio_keys.c static int gpio_keys_setup_key(struct platform_device *pdev, struct input_dev *input, struct gpio_button_data *bdata, const struct gpio_keys_button *button) { ...... error = devm_request_any_context_irq(&pdev->dev, bdata->irq, isr, irqflags, desc, bdata); } // kernel/irq/devres.c int devm_request_any_context_irq(struct device *dev, unsigned int irq, irq_handler_t handler, unsigned long irqflags, const char *devname, void *dev_id) { ...... rc = request_any_context_irq(irq, handler, irqflags, devname, dev_id); if (rc < 0) { devres_free(dr); return rc; } ...... return rc; } // kernel/irq/manage.c int request_any_context_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev_id) { ...... ret = request_irq(irq, handler, flags, name, dev_id); return !ret ? IRQC_IS_HARDIRQ : ret; } // include/linux/interrupt.h static inline int __must_check request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev) { return request_threaded_irq(irq, handler, NULL, flags, name, dev); } // kernel/irq/manage.c int request_threaded_irq(unsigned int irq, irq_handler_t handler, irq_handler_t thread_fn, unsigned long irqflags, const char *devname, void *dev_id) { ...... chip_bus_lock(desc); retval = __setup_irq(irq, desc, action); chip_bus_sync_unlock(desc); ...... return retval; } // kernel/irq/manage.c static int __setup_irq(unsigned int irq, struct irq_desc *desc, struct irqaction *new) { ...... if (!shared) { ret = irq_request_resources(desc); if (ret) { pr_err("Failed to request resources for %s (irq %d) on irqchip %s\n", new->name, irq, desc->irq_data.chip->name); goto out_mask; } ...... } ...... } // kernel/irq/manage.c static int irq_request_resources(struct irq_desc *desc) { struct irq_data *d = &desc->irq_data; struct irq_chip *c = d->chip; return c->irq_request_resources ? c->irq_request_resources(d) : 0; } // drivers/pinctrl/sunxi/pinctrl-sunxi.c static struct irq_chip sunxi_pinctrl_edge_irq_chip = { .name = "sunxi_pio_edge", .irq_ack = sunxi_pinctrl_irq_ack, .irq_mask = sunxi_pinctrl_irq_mask, .irq_unmask = sunxi_pinctrl_irq_unmask, .irq_request_resources = sunxi_pinctrl_irq_request_resources, .irq_release_resources = sunxi_pinctrl_irq_release_resources, .irq_set_type = sunxi_pinctrl_irq_set_type, .irq_set_wake = sunxi_pinctrl_irq_set_wake, }; // drivers/pinctrl/sunxi/pinctrl-sunxi.c static int sunxi_pinctrl_irq_request_resources(struct irq_data *d) { struct sunxi_pinctrl *pctl = irq_data_get_irq_chip_data(d); struct sunxi_desc_function *func; func = sunxi_pinctrl_desc_find_function_by_pin(pctl, pctl->irq_array[d->hwirq], "irq"); if (!func) return -EINVAL; /* Change muxing to INT mode */ printk(KERN_EMERG"[lmx] irq:%d set int mode pin:%d d->hwirq:%ld func->muxval:%d\n", d->irq, pctl->irq_array[d->hwirq], d->hwirq, func->muxval); sunxi_pmx_set(pctl->pctl_dev, pctl->irq_array[d->hwirq], func->muxval); return 0; } // drivers/pinctrl/sunxi/pinctrl-sunxi.c static void sunxi_pmx_set(struct pinctrl_dev *pctldev, unsigned pin, u8 config) { struct sunxi_pinctrl *pctl = pinctrl_dev_get_drvdata(pctldev); unsigned long flags; u32 val, mask; raw_spin_lock_irqsave(&pctl->lock, flags); pin -= pctl->desc->pin_base; val = readl(pctl->membase + sunxi_mux_reg(pin)); mask = MUX_PINS_MASK << sunxi_mux_offset(pin); writel((val & ~mask) | config << sunxi_mux_offset(pin), pctl->membase + sunxi_mux_reg(pin)); raw_spin_unlock_irqrestore(&pctl->lock, flags); }无论有多复杂的代码,最终都需要通过读写寄存器的方式来实现控制芯片,而通过上述代码分析,即可发现 sunxi_pmx_set() 接口用于配置寄存器,是最底层的接口,可以通过打印输出传入的参数,来检查是否有问题。
PF3 打印输出为:
[ 10.683205] [lmx] irq:148 set int mode pin:163 d->hwirq:131 func->muxval:6PF4 打印输出为:
[ 10.683557] [lmx] irq:149 set int mode pin:196 d->hwirq:132 func->muxval:6这里就能看出很奇怪的地方,PF3 的引脚编号是 163,而 PF4 却是 196,跨度很大。
通过以下指令查询 PF4 的正确引脚编号,也可以得知 196 引脚编号是哪一组:
mercury-demo:/ # cat /sys/kernel/debug/pinctrl/pio/pins registered pins: 137 ...... pin 160 (PF0) pin 161 (PF1) pin 162 (PF2) pin 163 (PF3) pin 164 (PF4) pin 165 (PF5) pin 166 (PF6) ...... pin 196 (PG4) pin 197 (PG5) ......确认 PF4 正确引脚编号是 164,而 196 对应是 PG4,实际生效的是 PG4,通过以下指令即可确认:
mercury-demo:/sys/kernel/debug/sunxi_pinctrl # echo PG4 > sunxi_pin mercury-demo:/sys/kernel/debug/sunxi_pinctrl # cat * pin[PG4] data: 1 pio pin[PG4] dlevel: 1 pin[PG4] funciton: 6 NOMATCH pin[PG4] pull: 1 PG4 pin[PG4] funciton: 6 pin[PG4] data: 1 pin[PG4] dlevel: 1 pin[PG4] pull: 1根据代码确定引脚编号来源于 pctl->irq_array 数组,通过 pctl->irq_array 赋值的地方进行打印输出,是否一开始就出错了:
// drivers/pinctrl/sunxi/pinctrl-sunxi.c static int sunxi_pinctrl_build_state(struct platform_device *pdev) { ...... /* Count functions associated groups */ for (i = 0; i < pctl->desc->npins; i++) { const struct sunxi_desc_pin *pin = pctl->desc->pins + i; struct sunxi_desc_function *func = pin->functions; while (func->name) { /* Create interrupt mapping while we're at it */ if (!strcmp(func->name, "irq")) { int irqnum = func->irqnum + func->irqbank * IRQ_PER_BANK; pctl->irq_array[irqnum] = pin->pin.number; printk(KERN_EMERG"[lmx] pctl->irq_array[%d] = %d (func->irqnum:%d func->irqbank:%d)\n", irqnum, pin->pin.number, func->irqnum, func->irqbank); } sunxi_pinctrl_add_function(pctl, func->name); func++; } } ...... return 0; } // drivers/pinctrl/sunxi/pinctrl-sunxi.h #define IRQ_PER_BANK 32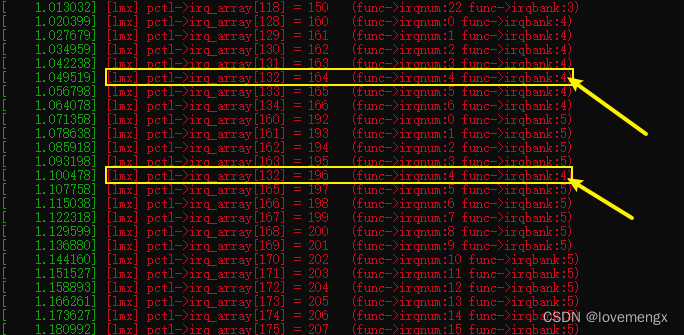
可以发现,PF4(164)对应的索引是 132,原本被正确赋值为 164,但又被覆盖为 PG4(196)。
不难发现,出现覆盖的原因是因为 PG4 的 func->irqbank 数值错误(4),导致索引下标计算错误。根据前后文来看,func->irqbank 的正确数值应该是 5,代入计算得到正确的值 164:
int irqnum(164) = func->irqnum(4) + func->irqbank(5) * IRQ_PER_BANK(32);大概率硬件资源描述配置出错,通过搜索 irqbank 被赋值的方法,来定位描述配置出错的地方:
// drivers/pinctrl/sunxi/pinctrl-sunxi.h #define SUNXI_FUNCTION_IRQ_BANK(_val, _bank, _irq) \ { \ .name = "irq", \ .muxval = _val, \ .irqbank = _bank, \ .irqnum = _irq, \ }使用的是 SUNXI_FUNCTION_IRQ_BANK 宏,重点检查第二个参数:
// drivers/pinctrl/sunxi/pinctrl-sun50iw9p1.c static const struct sunxi_desc_pin sun50iw9p1_pins[] = { ...... SUNXI_PIN(SUNXI_PINCTRL_PIN(G, 3), SUNXI_FUNCTION(0x0, "gpio_in"), SUNXI_FUNCTION(0x1, "gpio_out"), SUNXI_FUNCTION(0x2, "sdc1"), /* D1 */ SUNXI_FUNCTION_IRQ_BANK(0x6, 5, 3), /* PG_EINT3 */ SUNXI_FUNCTION(0x7, "io_disabled")), SUNXI_PIN(SUNXI_PINCTRL_PIN(G, 4), SUNXI_FUNCTION(0x0, "gpio_in"), SUNXI_FUNCTION(0x1, "gpio_out"), SUNXI_FUNCTION(0x2, "sdc1"), /* D2 */ // 可以发现第二个参数恰好是 4,根据分析结果,以及结合上下文,正确的应该是 5 SUNXI_FUNCTION_IRQ_BANK(0x6, 4, 4), /* PG_EINT4 */ SUNXI_FUNCTION(0x7, "io_disabled")), SUNXI_PIN(SUNXI_PINCTRL_PIN(G, 5), SUNXI_FUNCTION(0x0, "gpio_in"), SUNXI_FUNCTION(0x1, "gpio_out"), SUNXI_FUNCTION(0x2, "sdc1"), /* D3 */ SUNXI_FUNCTION_IRQ_BANK(0x6, 5, 5), /* PG_EINT5 */ SUNXI_FUNCTION(0x7, "io_disabled")), ...... };修改之后的 pctl->irq_array 打印输出正确:
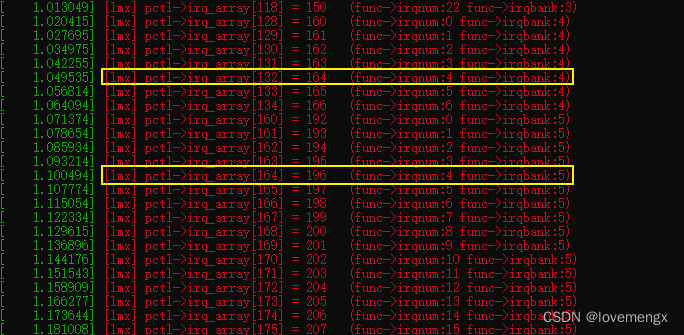
进行实测,PF4 已经可以正常的被设置为中断模式。
问题总结
全志原厂提供的 SoCs pinctrl driver 中的 PG4 中断信息描述错误,导致覆盖了 PF4 的引脚编号,因此只要修正 PG4 的描述信息,即可解决问题。
这个问题不仅仅会影响 PF4 无法使用,也会影响 PG4 引脚无法使用,从代码来看,想要设置为 PG4 为中断模式,实际修改的会 PA0(0)。
--- a/longan/kernel/linux-4.9/drivers/pinctrl/sunxi/pinctrl-sun50iw9p1.c +++ b/longan/kernel/linux-4.9/drivers/pinctrl/sunxi/pinctrl-sun50iw9p1.c @@ -693,7 +693,7 @@ SUNXI_FUNCTION(0x0, "gpio_in"), SUNXI_FUNCTION(0x1, "gpio_out"), SUNXI_FUNCTION(0x2, "sdc1"), /* D2 */ - SUNXI_FUNCTION_IRQ_BANK(0x6, 4, 4), /* PG_EINT4 */ + SUNXI_FUNCTION_IRQ_BANK(0x6, 5, 4), /* PG_EINT4 */ SUNXI_FUNCTION(0x7, "io_disabled")), SUNXI_PIN(SUNXI_PINCTRL_PIN(G, 5), SUNXI_FUNCTION(0x0, "gpio_in"), -
回复: 【入门必看】全志V853开发板——构建编译与固件烧篇发布在 V Series
还有一个更加方便的配置编译命令:
- source build/envsetup.sh
- lunch 1
- make && pack
不是很明白为啥楼主要用 ./build.sh 的方式配置编译,就好像不明白我自己刚拿到 SDK 的时候为啥也用 ./build.sh 的方式编译,哈哈。
-
回复: 【分析笔记】Linux I2C-Tools 使用踩坑笔记发布在 Linux
@dream 在 【分析笔记】Linux I2C-Tools 使用踩坑笔记 中说:
@daizebin sht41 的器件地址是 0x44,就决定了在自动模式下,是以写方式检测,所以可以识别到,但是 sgp41 的器件地址是 0x59,落在了以读方式检测的范围,所以无法识别到。具体看本文 scan_i2c_bus() 的源码截图就能看出来。
再补充一下,不是所有的 I2C 器件都必须要以写的方式才能检测出来,只有少部分,如 sht41\sgp41 这类器件比较特别,需要先写再读才有应答,正因为大部分 I2C 器件无论是读写都会有应答,所以才会因惯性思维,导致踩坑。
-
R311 Tina usb gadget ncm wrong ndp sign 问题修复发布在 其它全志芯片讨论区
一、模拟网卡简介
在 Linux 通过 usb 模拟网卡时,有四种方式:
- 使用 usb gadget rndis
- 使用 usb gadget ecm
- 使用 usb gadget ncm
- 使用 usb gadget eem
rndis:
是微软公司制定的协议规范, 不过似乎规范不完整, 引起 rndis host 驱动作者的强烈反对。lichee\linux-4.9\drivers\net\usb\rndis_host.c
ecm:
传输的是纯粹的以太网包,一次USB传输只包含一个以太网帧,因此吞吐量较低,实测在 6MB/s 左右,Windows 的驱动不太好找,Ubuntu 可以直接支持。ncm:
ecm 的改进版本,每个NCM报文可以包含多个以太网帧,这种特性称为报文聚合,即调用一次URB可以发送或者接收多个IP报文,实测在 17MB/s 左右,Windows 自带有驱动(本文在 Win10 平台实测通过),Ubuntu 可以直接支持,本文使用 ncm 方式实现网卡模拟。eem:
了解不多。二、问题现象
启用步骤很简单,全志也有相应的文档介绍,这里只介绍问题以及解决方法。
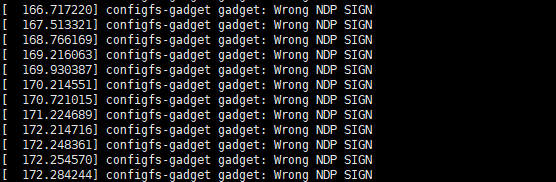
接入 Windows 之后,启用该网卡,会不停的输出 "Wrong NDP SIGN",并且无法相互 ping 通。
分析发现因为 ncm->ndp_sign 的值等于 0,未被正确赋值。(f_ncm.c)

分析发现 ncm->ndp_sign 只有在设置 CRC 模式的时候才会拷贝 ncm->parser_opts,由此可见 Win10 的 ncm 驱动并未主动配置 CRC 模式引起。
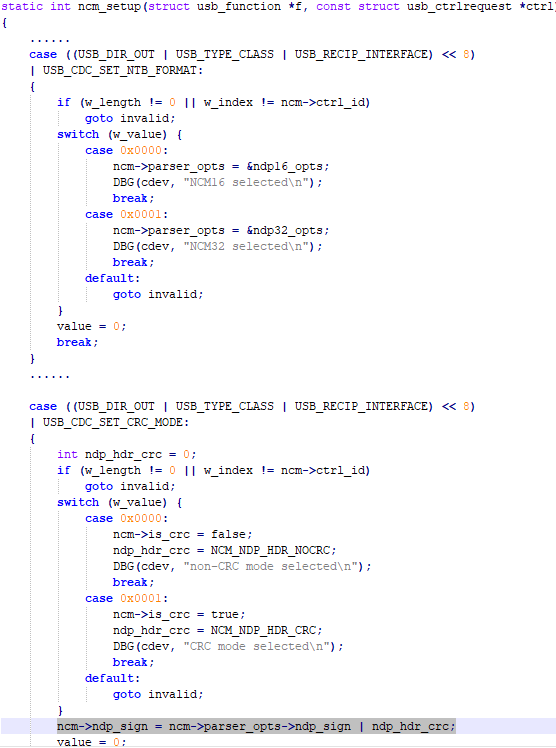
经调试发现 USB_CDC_SET_NTB_FORMAT 会被触发,会设置 ncm->parser_opts,那么如果也顺道一同拷贝 ncm->ndp_sign 应该就能解决问题。
实测确实解决了问题,既然 f_ncm.c 驱动有缺陷,那么很有可能最新的内核已经解决了此问题,查看了最新内核的驱动(v5.18),发现已经调整了 ncm->ndp_sign 顺序,在 switch 语句后面进行赋值,同样也能解决问题。

三、修复补丁
由于 5.9.y 相对于 4.9 版本改动较大,这里发出一个针对 4.9 版本修复此问题的最小改动补丁:
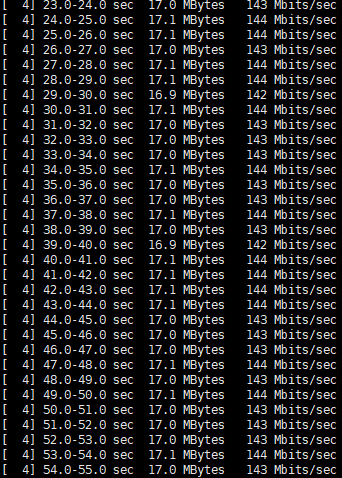
diff --git a/lichee/linux-4.9/drivers/usb/gadget/function/f_ncm.c b/lichee/linux-4.9/drivers/usb/gadget/function/f_ncm.c old mode 100644 new mode 100755 index 639603722..278580b5a --- a/lichee/linux-4.9/drivers/usb/gadget/function/f_ncm.c +++ b/lichee/linux-4.9/drivers/usb/gadget/function/f_ncm.c @@ -828,7 +828,7 @@ static int ncm_setup(struct usb_function *f, const struct usb_ctrlrequest *ctrl) default: goto invalid; } - ncm->ndp_sign = ncm->parser_opts->ndp_sign | ndp_hdr_crc; + // ncm->ndp_sign = ncm->parser_opts->ndp_sign | ndp_hdr_crc; value = 0; break; } @@ -846,6 +846,9 @@ static int ncm_setup(struct usb_function *f, const struct usb_ctrlrequest *ctrl) w_value, w_index, w_length); } + // lmx: fix ncm_unwrap_ntb() --> ncm->ndp_sign to==0, generate "Wrong NDP SIGN" Bug + ncm->ndp_sign = ncm->parser_opts->ndp_sign | (ncm->is_crc ? NCM_NDP_HDR_CRC : 0); + /* respond with data transfer or status phase? */ if (value >= 0) { DBG(cdev, "ncm req%02x.%02x v%04x i%04x l%d\n",实测吞吐量:
-
回复: 【V853开发板试用】使用pack命令报错:ERROR: Unsupport PACK_PLATFORM: tinyos发布在 V Series
最方便的编译方法是:
- source build/envsetup.sh
- lunch 1
你报错,大概是通过 build.sh 编译,在linux_dev 选择了 tinyos,其实你如果选择 openWRT 也是也可以的。
dream 发布的最新帖子
-
回复: 全志D1裸奔工具XFEL发布在 MR Series
@dsp2000 通过 Zadig 工具 把 "USB Device(VID_1f3a_PID_efe8)" 编辑名称为 "Allwinner SoC in FEL mode" 就行了。
-
回复: V851S Tina 5.0 SDK 无法使用文件锁的问题发布在 V Series
@dream 同步最新的信息, 已经使用了 mutex 的方式,替换文件锁,可以解决 opkg remove 和 opkg list 等指令不能正常使用的问题,目前 opkg install 会出现段错误。
原以为解决了文件锁,就能解决 opkg 不能使用的问题,没想到只解决了一半

*** libopkg\opkg_conf.c 2022-02-25 04:27:58.000000000 +0800 --- libopkg\opkg_conf.c 2024-03-03 14:20:36.000000000 +0800 *************** *** 19,30 **** --- 19,31 ---- #include <stdio.h> #include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <glob.h> #include <unistd.h> + #include <sys/mman.h> #include "opkg_conf.h" #include "pkg_vec.h" #include "pkg.h" #include "xregex.h" #include "sprintf_alloc.h" *************** *** 423,436 **** --- 424,452 ---- int opkg_conf_init(void) { pkg_src_list_init(&conf->pkg_src_list); pkg_dest_list_init(&conf->pkg_dest_list); pkg_dest_list_init(&conf->tmp_dest_list); nv_pair_list_init(&conf->arch_list); + + conf->mlock = mmap(NULL, sizeof(struct mt_lock), PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANON, -1, 0); + memset(conf->mlock, 0, sizeof(struct mt_lock)); + pthread_mutexattr_init(&conf->mlock->mutexattr); + pthread_mutexattr_setpshared(&conf->mlock->mutexattr, PTHREAD_PROCESS_SHARED); + pthread_mutex_init(&conf->mlock->mutex, &conf->mlock->mutexattr); return 0; + } + + static int my_lockf(int fd, int cmd, off_t len) + { + switch(cmd){ + case F_TLOCK: return pthread_mutex_trylock(&conf->mlock->mutex); + case F_ULOCK: return pthread_mutex_unlock(&conf->mlock->mutex); + } + return -22; } int opkg_conf_load(void) { int i, glob_ret; char *tmp, *tmp_dir_base, **tmp_val; *************** *** 498,510 **** lock_fd = creat(lock_file, S_IRUSR | S_IWUSR | S_IRGRP); if (lock_fd == -1) { opkg_perror(ERROR, "Could not create lock file %s", lock_file); goto err2; } ! if (lockf(lock_fd, F_TLOCK, (off_t) 0) == -1) { opkg_perror(ERROR, "Could not lock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); lock_fd = -1; goto err2; --- 514,526 ---- lock_fd = creat(lock_file, S_IRUSR | S_IWUSR | S_IRGRP); if (lock_fd == -1) { opkg_perror(ERROR, "Could not create lock file %s", lock_file); goto err2; } ! if (my_lockf(lock_fd, F_TLOCK, (off_t) 0) == -1) { opkg_perror(ERROR, "Could not lock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); lock_fd = -1; goto err2; *************** *** 573,585 **** hash_table_deinit(&conf->file_hash); hash_table_deinit(&conf->obs_file_hash); if (rmdir(conf->tmp_dir) == -1) opkg_perror(ERROR, "Couldn't remove dir %s", conf->tmp_dir); err3: ! if (lockf(lock_fd, F_ULOCK, (off_t) 0) == -1) opkg_perror(ERROR, "Couldn't unlock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); if (unlink(lock_file) == -1) --- 589,601 ---- hash_table_deinit(&conf->file_hash); hash_table_deinit(&conf->obs_file_hash); if (rmdir(conf->tmp_dir) == -1) opkg_perror(ERROR, "Couldn't remove dir %s", conf->tmp_dir); err3: ! if (my_lockf(lock_fd, F_ULOCK, (off_t) 0) == -1) opkg_perror(ERROR, "Couldn't unlock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); if (unlink(lock_file) == -1) *************** *** 652,664 **** pkg_hash_deinit(); hash_table_deinit(&conf->file_hash); hash_table_deinit(&conf->obs_file_hash); if (lock_fd != -1) { ! if (lockf(lock_fd, F_ULOCK, (off_t) 0) == -1) opkg_perror(ERROR, "Couldn't unlock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); --- 668,680 ---- pkg_hash_deinit(); hash_table_deinit(&conf->file_hash); hash_table_deinit(&conf->obs_file_hash); if (lock_fd != -1) { ! if (my_lockf(lock_fd, F_ULOCK, (off_t) 0) == -1) opkg_perror(ERROR, "Couldn't unlock %s", lock_file); if (close(lock_fd) == -1) opkg_perror(ERROR, "Couldn't close descriptor %d (%s)", lock_fd, lock_file); *** libopkg\opkg_conf.h 2022-02-25 04:27:58.000000000 +0800 --- libopkg\opkg_conf.h 2024-03-03 14:20:05.000000000 +0800 *************** *** 20,31 **** --- 20,32 ---- typedef struct opkg_conf opkg_conf_t; extern opkg_conf_t *conf; #include <stdarg.h> #include <fnmatch.h> /* FNM_CASEFOLD */ + #include <pthread.h> #include "hash_table.h" #include "pkg_src_list.h" #include "pkg_dest_list.h" #include "nv_pair_list.h" *************** *** 39,50 **** --- 40,56 ---- /* In case the config file defines no dest */ #define OPKG_CONF_DEFAULT_DEST_NAME "root" #define OPKG_CONF_DEFAULT_DEST_ROOT_DIR "/" #define OPKG_CONF_DEFAULT_HASH_LEN 1024 + + struct mt_lock { + pthread_mutex_t mutex; + pthread_mutexattr_t mutexattr; + }; struct opkg_conf { pkg_src_list_t pkg_src_list; pkg_dest_list_t pkg_dest_list; pkg_dest_list_t tmp_dest_list; nv_pair_list_t arch_list; *************** *** 105,116 **** --- 111,125 ---- char *signature_ca_file; char *signature_ca_path; hash_table_t pkg_hash; hash_table_t file_hash; hash_table_t obs_file_hash; + + // replace file lock + struct mt_lock *mlock; }; enum opkg_option_type { OPKG_OPT_TYPE_BOOL, OPKG_OPT_TYPE_INT, OPKG_OPT_TYPE_STRING -
V851S Tina 5.0 SDK 无法使用文件锁的问题发布在 V Series
起初是为了分析 opkg 工具用不了的问题:
root@TinaLinux:/# opkg list Collected errors: * opkg_conf_load: Could not lock /var/lock/opkg.lock: Permission denied.通过分析其系统调用链,发现 opkg 试图设置文件锁失败了:
root@TinaLinux:/# strace opkg list execve("/bin/opkg", ["opkg", "list"], 0xbef8ad04 /* 21 vars */) = 0 set_tls(0xb6f555d8) = 0 set_tid_address(0xb6f5618c) = 1120 open("/usr/lib/eyesee-mpp/libubox.so.20210516", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/usr/lib/eyesee-mpp/libubox.so.20210516", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/etc/ld-musl-armhf.path", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/lib/libubox.so.20210516", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = 3 fcntl64(3, F_SETFD, FD_CLOEXEC) = 0 fstat64(3, {st_mode=S_IFREG|0644, st_size=38084, ...}) = 0 read(3, "\177ELF\1\1\1\0\0\0\0\0\0\0\0\0\3\0(\0\1\0\0\0\244!\0\0004\0\0\0"..., 936) = 936 mmap2(NULL, 106496, PROT_READ|PROT_EXEC, MAP_PRIVATE, 3, 0) = 0xb6ec0000 mmap2(0xb6ed8000, 8192, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED, 3, 0x8000) = 0xb6ed8000 close(3) = 0 mprotect(0xb6ed8000, 4096, PROT_READ) = 0 mprotect(0x3e000, 4096, PROT_READ) = 0 stat64("/etc/opkg.conf", {st_mode=S_IFREG|0644, st_size=85, ...}) = 0 open("/etc/opkg.conf", O_RDONLY|O_LARGEFILE) = 3 brk(NULL) = 0xd97000 brk(0xd98000) = 0xd98000 brk(0xd99000) = 0xd99000 brk(0xd9a000) = 0xd9a000 brk(0xd9b000) = 0xd9b000 brk(0xd9c000) = 0xd9c000 brk(0xd9d000) = 0xd9d000 brk(0xd9f000) = 0xd9f000 brk(0xda0000) = 0xda0000 read(3, "dest root /\ndest ram /tmp\nlists_"..., 1024) = 85 read(3, "", 1024) = 0 close(3) = 0 open("/etc/opkg/", O_RDONLY|O_LARGEFILE|O_CLOEXEC|O_DIRECTORY) = 3 fcntl64(3, F_SETFD, FD_CLOEXEC) = 0 getdents64(3, 0xb6ed9378 /* 4 entries */, 2048) = 112 getdents64(3, 0xb6ed9378 /* 0 entries */, 2048) = 0 close(3) = 0 open("/etc/opkg/customfeeds.conf", O_RDONLY|O_LARGEFILE) = 3 read(3, "# add your custom package feeds "..., 1024) = 103 read(3, "", 1024) = 0 close(3) = 0 open("/var/lock/opkg.lock", O_WRONLY|O_CREAT|O_TRUNC|O_LARGEFILE, 0640) = 3 fcntl64(3, F_SETLK64, {l_type=F_WRLCK, l_whence=SEEK_CUR, l_start=0, l_len=0}) = -1 EACCES (Permission denied) close(3) = 0 writev(2, [{iov_base="", iov_len=0}, {iov_base="Collected errors:\n", iov_len=18}], 2Collected errors: ) = 18 writev(2, [{iov_base=" * opkg_conf_load: Could not loc"..., iov_len=75}, {iov_base=NULL, iov_len=0}], 2 * opkg_conf_load: Could not lock /var/lock/opkg.lock: Permission denied. ) = 75 exit_group(-1) = ? +++ exited with 255 +++然后自己写一个测试程序,确实会失败:
root@TinaLinux:/tmp# strace ./test execve("./test", ["./test"], 0xbeb32d00 /* 22 vars */) = 0 set_tls(0xb6f9c5d8) = 0 set_tid_address(0xb6f9d18c) = 1133 open("/usr/lib/eyesee-mpp/libstdc++.so.6", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/usr/lib/eyesee-mpp/libstdc++.so.6", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/etc/ld-musl-armhf.path", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/lib/libstdc++.so.6", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = 3 fcntl64(3, F_SETFD, FD_CLOEXEC) = 0 fstat64(3, {st_mode=S_IFREG|0775, st_size=976512, ...}) = 0 read(3, "\177ELF\1\1\1\0\0\0\0\0\0\0\0\0\3\0(\0\1\0\0\0\340\2\7\0004\0\0\0"..., 936) = 936 mmap2(NULL, 1048576, PROT_READ|PROT_EXEC, MAP_PRIVATE, 3, 0) = 0xb6e21000 mmap2(0xb6f18000, 36864, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED, 3, 0xe7000) = 0xb6f18000 mmap2(0xb6f20000, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED|MAP_ANONYMOUS, -1, 0) = 0xb6f20000 close(3) = 0 open("/usr/lib/eyesee-mpp/libgcc_s.so.1", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/usr/lib/eyesee-mpp/libgcc_s.so.1", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = -1 ENOENT (No such file or directory) open("/lib/libgcc_s.so.1", O_RDONLY|O_LARGEFILE|O_CLOEXEC) = 3 fcntl64(3, F_SETFD, FD_CLOEXEC) = 0 fstat64(3, {st_mode=S_IFREG|0664, st_size=38356, ...}) = 0 read(3, "\177ELF\1\1\1\0\0\0\0\0\0\0\0\0\3\0(\0\1\0\0\0\230'\0\0004\0\0\0"..., 936) = 936 mmap2(NULL, 106496, PROT_READ|PROT_EXEC, MAP_PRIVATE, 3, 0) = 0xb6e07000 mmap2(0xb6e1f000, 8192, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_FIXED, 3, 0x8000) = 0xb6e1f000 close(3) = 0 mprotect(0xb6f18000, 20480, PROT_READ) = 0 mprotect(0xb6e1f000, 4096, PROT_READ) = 0 mprotect(0x20000, 4096, PROT_READ) = 0 brk(NULL) = 0xc2f000 brk(0xc34000) = 0xc34000 open("/tmp/opkg.lock", O_WRONLY|O_CREAT|O_TRUNC|O_LARGEFILE, 0644) = 3 fcntl64(3, F_SETLK64, {l_type=F_WRLCK, l_whence=SEEK_CUR, l_start=0, l_len=0}) = -1 EACCES (Permission denied) ioctl(1, TIOCGWINSZ, {ws_row=0, ws_col=0, ws_xpixel=0, ws_ypixel=0}) = 0 writev(1, [{iov_base="fd:[3] rc:[-1", iov_len=13}, {iov_base="]\n", iov_len=2}], 2fd:[3] rc:[-1] ) = 15 close(3) = 0 exit_group(0) = ? +++ exited with 0 +++在 ubuntu 上测试实例代码是可以上锁的,说明用法没问题:
ubuntu@ubuntu1804:~/work/v85x-tina-open/openwrt/package/dream/test/src$ g++ -o main main.cpp ubuntu@ubuntu1804:~/work/v85x-tina-open/openwrt/package/dream/test/src$ ubuntu@ubuntu1804:~/work/v85x-tina-open/openwrt/package/dream/test/src$ ./main fd:[3] rc:[0] ubuntu@ubuntu1804:~/work/v85x-tina-open/openwrt/package/dream/test/src$请问各位大佬,有谁知道是咋回事吗?(附文件系统类型)
root@TinaLinux:/tmp# df -Th Filesystem Type Size Used Available Use% Mounted on /dev/root squashfs 12.0M 12.0M 0 100% /rom devtmpfs devtmpfs 23.8M 0 23.8M 0% /dev tmpfs tmpfs 25.0M 16.0K 25.0M 0% /tmp /dev/by-name/UDISK ubifs 10.4M 36.0K 9.8M 0% /mnt/UDISK overlayfs:/mnt/UDISK/overlay overlay 10.4M 36.0K 9.8M 0% / tmpfs tmpfs 25.0M 0 25.0M 0% /run -
回复: Yuzuki Lizard V851S 开发板 WIFI 功能异常发布在 V Series
@null037 解决了,结合论坛的 SDK 以及 github 的 SDK,补充缺失的文件就行了。
-
Yuzuki Lizard V851S 开发板 WIFI 功能异常发布在 V Series
没查出是什么原因,有哪位大神可以帮忙看看是什么问题?
源码来源:github docker [https://github.com/YuzukiHD/Yuzukilizard]
问题现象:使用未经修改的 SDK 编译出来的固件,无法正常扫描 SSID 和连接 WIFI。
已经排查:
- 确认有识别到 XR829。
- 确认有成功下载 firmware。
- 确认所选的配置是 40M,且 GPIO 配置正确。
- 使用 iw 和 wifi -s 都不能正常扫描 ssid。
- 使用 ifconfig waln0 可以正常的 up、down。
问题日志:以下是内核启动 WIFI 时的日志输出:
[ 5.782165] ======== XRADIO WIFI OPEN ======== [ 5.787181] [XRADIO] Driver Label:XR_V02.16.91 _HT40_01.33 Feb 17 2024 10:35:49 [ 5.795746] [XRADIO] Allocated hw_priv @ c37c6c80 [ 5.801281] [XRADIO_ERR] Access_file failed, path:/data/misc/wifi/xr_wifi.conf! [ 5.810623] sunxi-wlan soc@03000000:wlan@0: bus_index: 1 [ 5.926666] sunxi-mmc sdc1: sdc set ios:clk 0Hz bm PP pm UP vdd 21 width 1 timing LEGACY(SDR12) dt B [ 5.936923] [XRADIO] Detect SDIO card 1 [ 5.951799] sunxi-mmc sdc1: no vqmmc,Check if there is regulator [ 5.979134] sunxi-mmc sdc1: sdc set ios:clk 400000Hz bm PP pm ON vdd 21 width 1 timing LEGACY(SDR12) dt B [ 6.019771] sunxi-mmc sdc1: sdc set ios:clk 400000Hz bm PP pm ON vdd 21 width 1 timing LEGACY(SDR12) dt B [ 6.034411] open /dev/mtd1 failed,ret=-6 [ 6.034423] remoteproc0: Can't finded boot_package head [ 6.034428] remoteproc0: sunxi_request_firmwarefailed,ret=-19 [ 6.054089] sunxi-mmc sdc1: sdc set ios:clk 400000Hz bm PP pm ON vdd 21 width 1 timing LEGACY(SDR12) dt B [ 6.075296] sunxi-mmc sdc1: sdc set ios:clk 400000Hz bm PP pm ON vdd 21 width 1 timing SD-HS(SDR25) dt B [ 6.086091] sunxi-mmc sdc1: sdc set ios:clk 50000000Hz bm PP pm ON vdd 21 width 1 timing SD-HS(SDR25) dt B [ 6.097147] sunxi-mmc sdc1: sdc set ios:clk 50000000Hz bm PP pm ON vdd 21 width 4 timing SD-HS(SDR25) dt B [ 6.108870] mmc1: new high speed SDIO card at address 0001 [ 6.115965] [SBUS] XRadio Device:sdio clk=50000000 [ 6.123030] [XRADIO] XRADIO_HW_REV 1.0 detected. [ 6.179491] [XRADIO] xradio_update_dpllctrl: DPLL_CTRL Sync=0x00c00000. [ 6.215546] [XRADIO] Bootloader complete [ 6.324725] [XRADIO] Firmware completed. [ 6.330654] [WSM] Firmware Label:XR_C09.08.52.73_DBG_02.122 2GHZ HT40 May 18 2021 13:36:09 [ 6.348111] [XRADIO] Firmware Startup Done. [ 6.353158] [XRADIO_WRN] enable Multi-Rx! [ 6.370051] ieee80211 phy0: Failed to initialize wep: -2 [ 6.376126] ieee80211 phy0: Selected rate control algorithm 'minstrel_ht' [ 6.472871] [VIN_WARN]sensor_helper_probe: cannot get sensor0_cameravdd supply, setting it to NULL! [ 6.483380] [VIN_WARN]sensor_helper_probe: cannot get sensor0_iovdd supply, setting it to NULL! [ 6.493411] [VIN_WARN]sensor_helper_probe: cannot get sensor0_avdd supply, setting it to NULL! [ 6.503160] [VIN_WARN]sensor_helper_probe: cannot get sensor0_dvdd supply, setting it to NULL! [ 6.583658] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.593242] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.602769] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.612213] [VIN_DEV_I2C]gc2053_mipi sensor read retry = 2 [ 6.819401] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.828941] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.838493] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 6.847865] [VIN_DEV_I2C]gc2053_mipi sensor read retry = 2 [ 7.074215] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.083765] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.093316] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.102687] [VIN_DEV_I2C]gc2053_mipi sensor read retry = 2 [ 7.309327] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.318844] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.328392] sunxi_i2c_do_xfer()1974 - [i2c1] incomplete xfer (status: 0x20, dev addr: 0x37) [ 7.337775] [VIN_DEV_I2C]gc2053_mipi sensor read retry = 2 [ 7.343932] [gc2053_mipi] error, chip found is not an target chip. [ 7.363360] [VIN_ERR]registering gc2053_mipi, No such device! [ 7.603549] udevd[893]: could not create /tmp/run/udev: No such file or directory [ 8.251755] file system registered [ 8.269359] configfs-gadget 4100000.udc-controller: failed to start g1: -19 [ 8.381933] read descriptors [ 8.385211] read strings [ 8.543205] sunxi_set_cur_vol_work()482 WARN: get power supply failed [ 8.630668] android_work: sent uevent USB_STATE=CONNECTED [ 8.814319] configfs-gadget gadget: high-speed config #1: c [ 8.820726] android_work: sent uevent USB_STATE=CONFIGURED [ 11.049029] ieee80211_do_open: vif_type=2, p2p=0, ch=3, addr=54:0d:42:ee:1a:22 [ 11.057317] [STA] !!!xradio_vif_setup: id=0, type=2, p2p=0, addr=54:0d:42:ee:1a:22 [ 11.070863] [AP_WRN] BSS_CHANGED_ASSOC but driver is unjoined. [ 11.089296] IPv6: ADDRCONF(NETDEV_UP): wlan0: link is not ready在使用扫描的时候,会出现如下问题:
root@TinaLinux:/# iw wlan0 scan scan aborted! [ 374.889081] [SCAN_WRN] Timeout waiting for scan complete notification. [ 374.896412] [SCAN_WRN] xradio_scan_timeout:scan timeout cnt=1 [ 374.902934] [SCAN_ERR] Scan failed (-110). [ 375.902951] [WSM_ERR] [FW-DEBUG] DbgId = 4 [ 375.907562] [WSM_ERR] [FW-DEBUG] 0x000F4242从日志信息来看,通信和下载 WIFI 固件都没有问题,也尝试过使用 wifi -o sta 之后再 wifi -s,也不行。
[ 374.889081] [SCAN_WRN] Timeout waiting for scan complete notification. [ 374.896412] [SCAN_WRN] xradio_scan_timeout:scan timeout cnt=1 [ 374.902934] [SCAN_ERR] Scan failed (-110). [ 375.902951] [WSM_ERR] [FW-DEBUG] DbgId = 4 [ 375.907562] [WSM_ERR] [FW-DEBUG] 0x000F4242 [ 375.912376] [SCAN_WRN] Scan timeout already occured. Don't cancel work [ 730.729141] [SCAN_WRN] Timeout waiting for scan complete notification. [ 730.736667] [SCAN_WRN] xradio_scan_timeout:scan timeout cnt=2 [ 730.743224] [SCAN_ERR] Scan failed (-110). [ 731.743199] [WSM_ERR] [FW-DEBUG] DbgId = 4 [ 731.747803] [WSM_ERR] [FW-DEBUG] 0x000F4241
