XR806开发板试用
很有幸能获得本次技术社区和全志组织的XR806开发板试用活动。之前开发的嵌入式应用都是在Windows平台上进行的,对于Linux下的开发并不熟悉,在社区里看到群友使用官方提供的docker环境进行开发,顺着群友的指导,找到了以下的帖子:
https://aijishu.com/a/1060000000322138
结合帖子中的内容,使用docker中配置好的开发环境入门XR806开发板的使用。
1.1 开发环境搭建
我使用的win10,在win10使用docker进行开发,入门的教程可以参考微软官方提供的docker开发教程;
这里进行简要的说明,首先安装wsl2,具体的教程可以参考微软的官方文档。在“打开或关闭Windows功能”中确定勾选了“Hyper-V”功能。
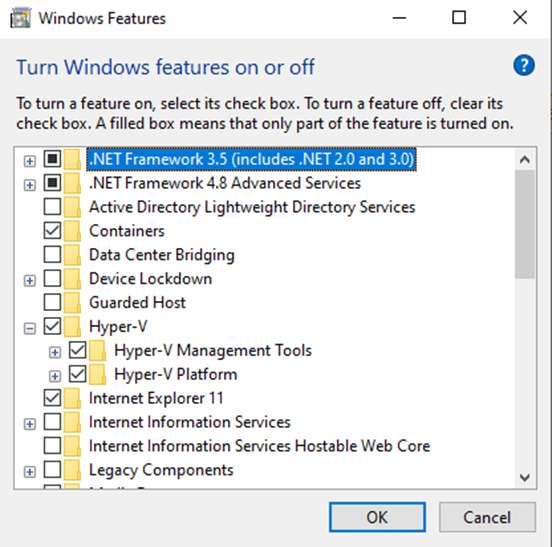
如过没有勾选,勾选后win10会自动更新该功能,重新启动系统后生效。在管理员模式下打开 PowerShell 或 Windows 命令提示符,方法是右键单击并选择“以管理员身份运行”,输入 wsl --install 命令,然后重启计算机。
通过在 PowerShell 或 Windows 命令提示符中输入以下命令来检查每个发行版的 WSL 版本:wsl -l -v。官方推荐使用wsl2,不过使用wsl –install默认安装的便是wsl2。
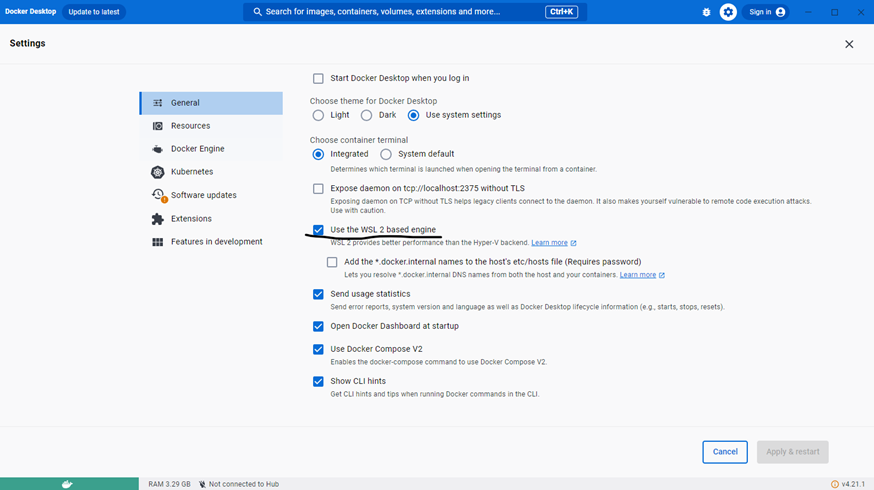
接下来参考微软的官方手册安装Docker Desktop for Windows,首先下载Docker Desktop,安装过程使用默认配置即可。安装后,启动Docker Desktop,然然后从任务栏的隐藏图标菜单中选择 Docker 图标。 右键单击该图标以显示 Docker 命令菜单,然后选择“设置”。
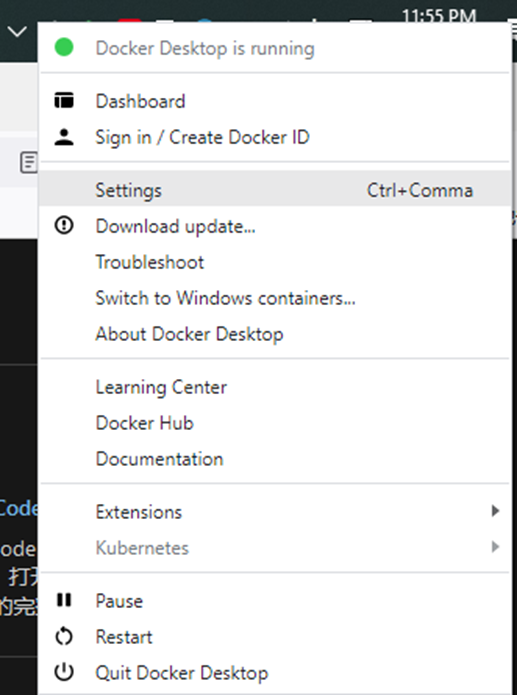
确保在“设置”>“常规”中选中“使用基于 WSL 2 的引擎”。
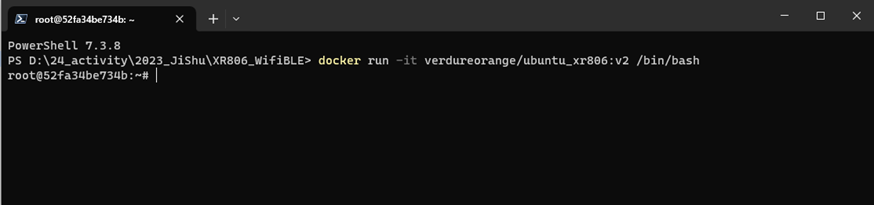
完成上述步骤后,可以在Windows PowerShell中运行以下指令在本地创建一个集成了FreeRTOS的XR806开发环境的容器:
docker run -it verdureorange/ubuntu_xr806:v2 /bin/bash
该环境中没有集成vim,可以通过以下指令安装vim
apt install vim
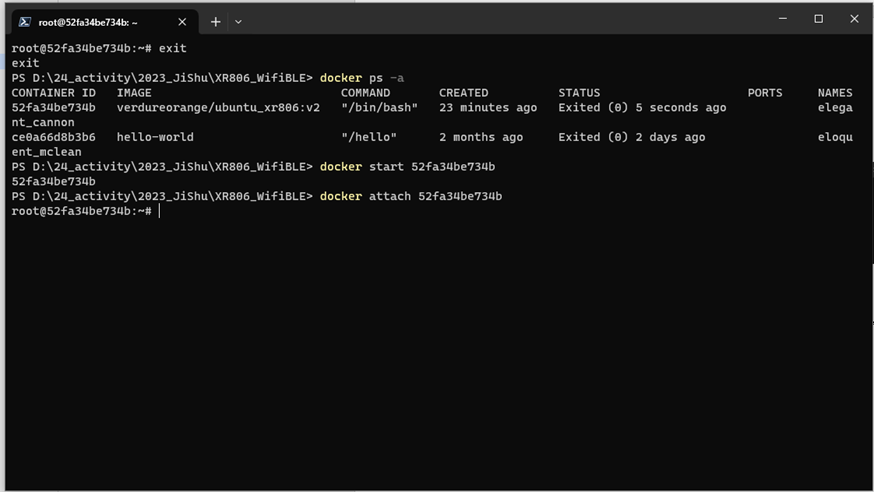
当退出容器开发环境后,重新进入时,使用docker start和dcoker attach指令,指令的参数中需要指定容器的ID,查看容器的ID使用docker ps指令。具体的操作如下图所示
到这一步,使用docker开发XR806的开发环境就搭建完毕了。
1.2 hello_demo编译和烧写
在xr806_sdk的project中有很多官方提供的demo程序,可供用户学习如何开发。在命令行中输入下列指令进入到SDK的顶层文件夹。
cd /root/xr806_sdk
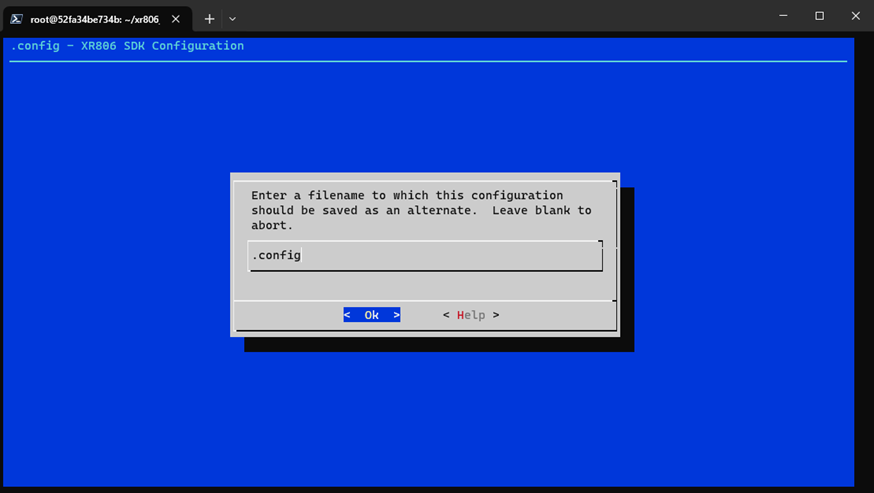
执行下列指令,打卡工程配置界面,根据工程的需要开启相应的功能模块
make menuconfig
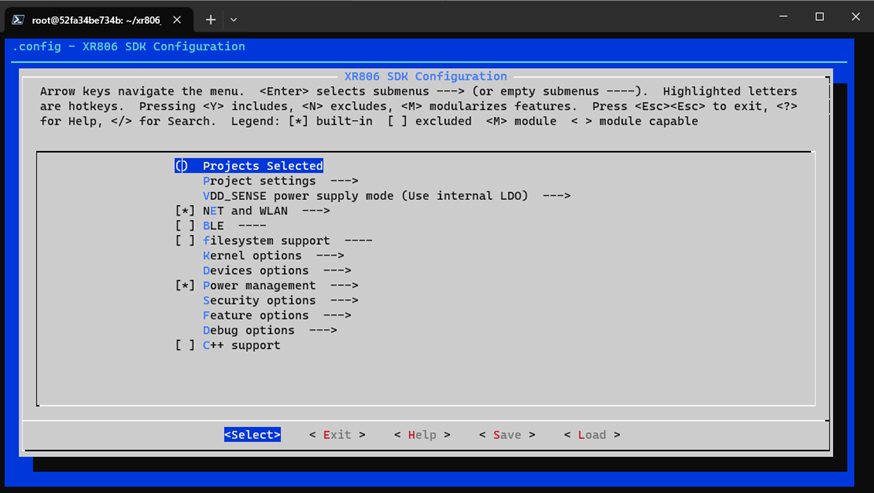
修改完成后,保存并退出。
在命令行中输入下列指令进入hello_demo的gcc文件夹,并执行make指令,完成工程的编译。编译完成后,使用make image指令生成镜像文件,用于固件的烧录。
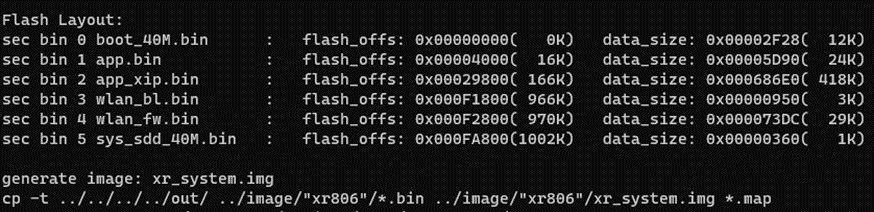
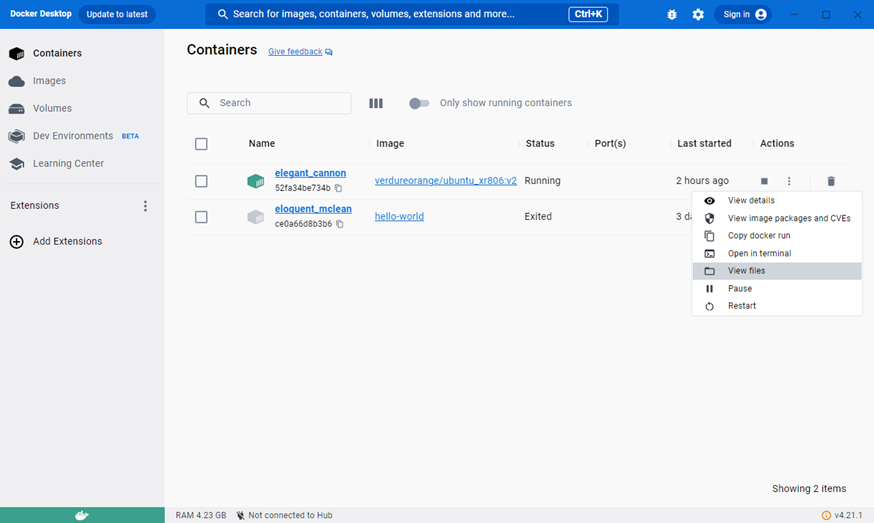
生成的镜像文件可以在xr806_sdk/out中找到,名称为xr_system.img。使用Docker Desktop查看Container中的文件可以将其中的镜像文件存储到win10的文件夹中。
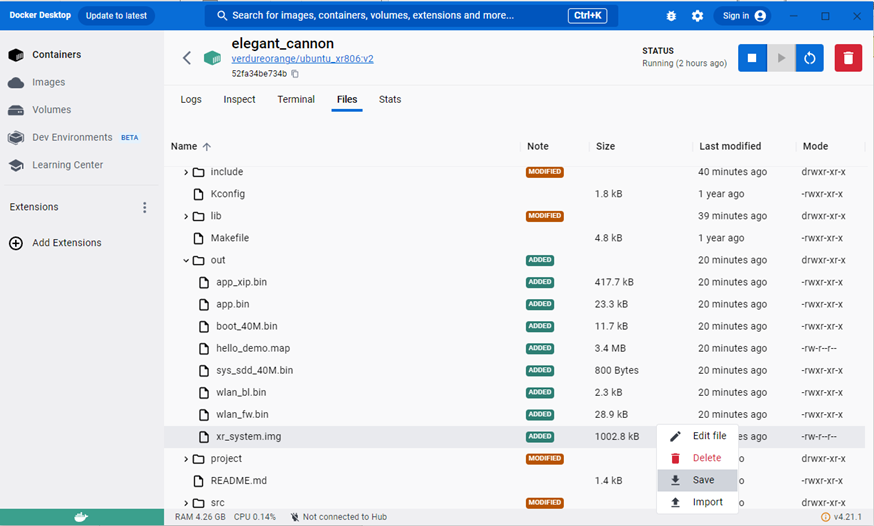
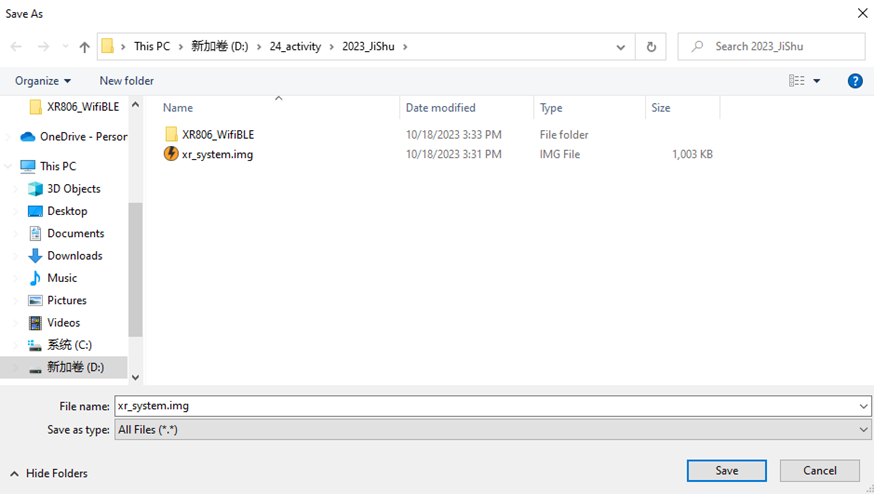
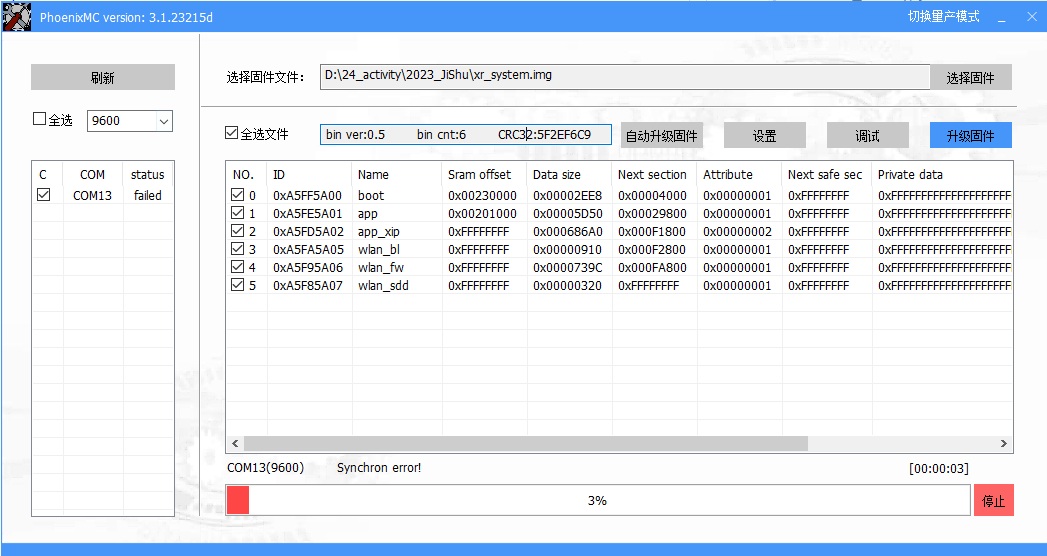
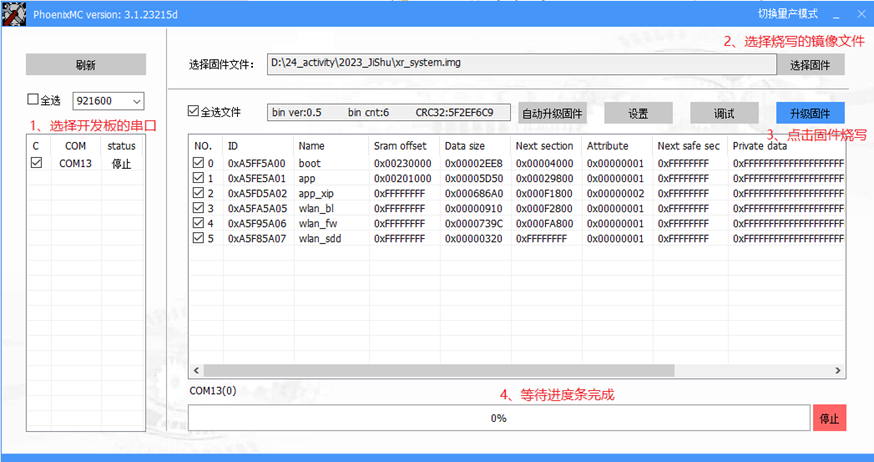
复制到win10的文件夹中后,使用xr806_sdk文件夹下的tool中的phoenixMC.exe将程序固件烧录到芯片当中。选择复制出来的xr_system.img。点击“升级固件”将固件烧录到芯片中。
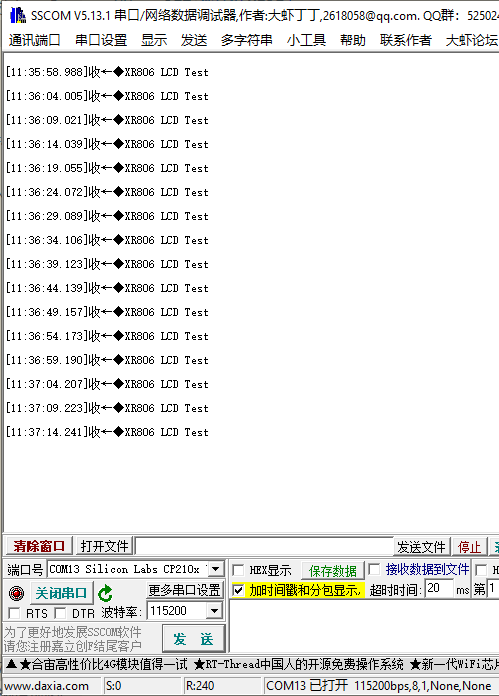
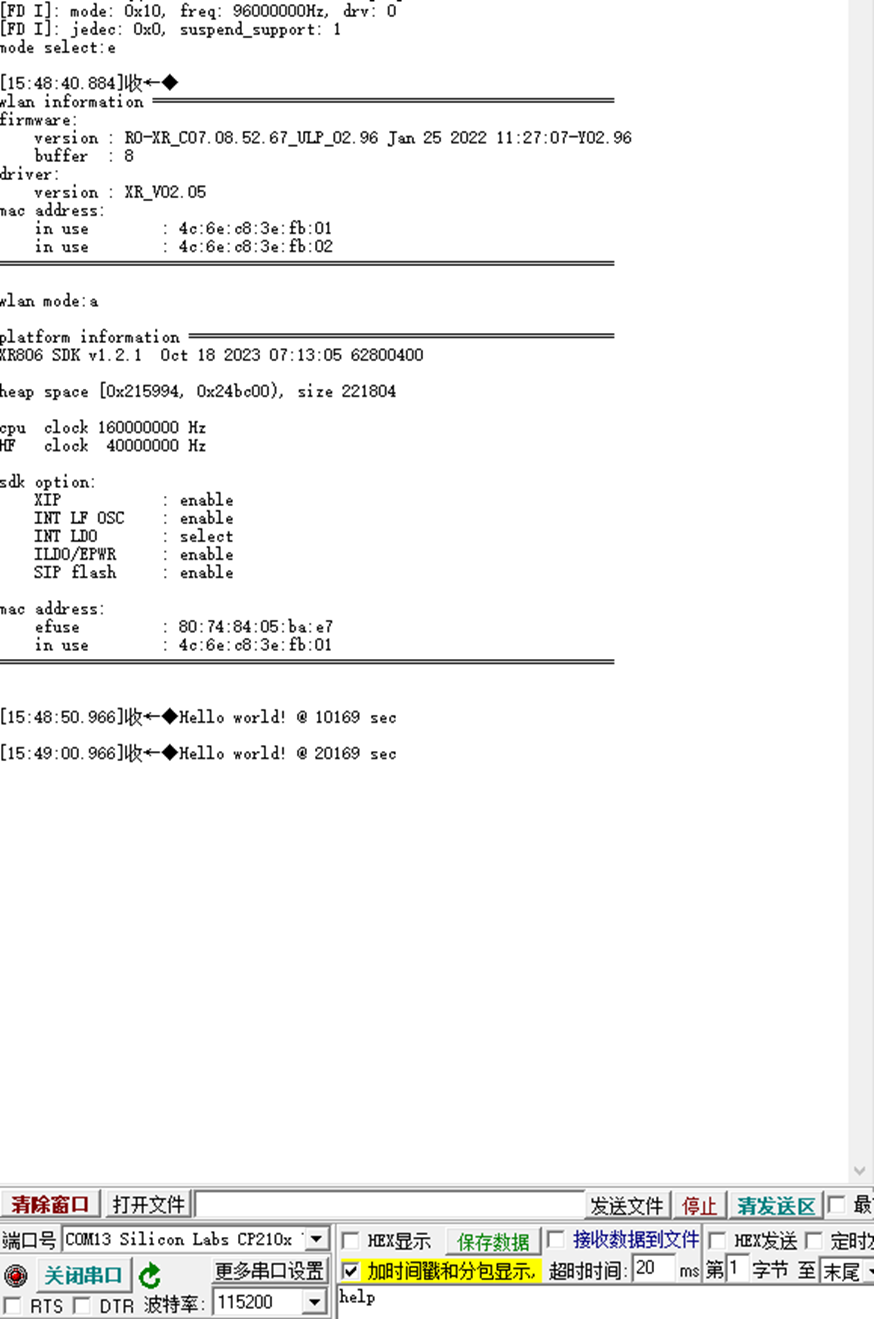
使用串口调试助手连接到开发板,使用复位按键复位芯片后,可以在串口调试助手输出窗口中看到以下的输出信息。
1.3 总结
第一次使用docker环境开发嵌入式应用,在有社区大佬的帮助下,开发过程还是很顺利的,初步学会了如何使用docker编译和生成固件,以及将固件复制到win10中,使用全志提供的固件升级工具完成固件的烧写。