最近在幫 Miyoo Mini/Miyoo Mini Plus 移植 drastic NDS 模擬器, 目前已經快完善了, 這邊先晚一點更新 ~
steward 发布的帖子
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区

-
回复: 如何像MIYOO一样做图形介面发布在 爱搞机专区
@lovehex99
會的, 還是會讓小志掌機可以跑像Miyoo的介面~小志掌機的帖子就是帶大家一起從頭做起, 主要是以原理的方式來解說讓大家知道移植的過程, 重點比較偏重於讓大家了解原理, 而不是直接給大家編譯好的固件使用, 所以更新會比較慢一點~
-
回复: 如何像MIYOO一样做图形介面发布在 爱搞机专区
@lovehex99
GMenuNX 是一個桌面介面, 應該是適合你的需求, 如果你的板子有如下條件就可以使用:- framebuffer 顯示驅動
- SDL 1.2
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
你這個系統並不是我那個測試系統
$ ls / bin data dev etc home lib lib64xthead mnt ok.wav overlay proc pseudo_init rdinit riscv64-unknown-linux-gnu rom root sbin squashfs sys tmp usr var www$ ls /etc/ adb_profile capabilities crontabs fw_env.config inittab modules.d opkg rc.common shells uci-defaults wpa_supplicant.conf asound.conf cedarc.conf device_info group main mtab passwd rc.d smt_cycle_sleep_wakeup.sh udev banner cedarx.conf dnsmasq.conf hotplug.d mdev.conf openwrt_release profile recorder.cfg smt_sleep.sh udhcpd.conf banner.failsafe config fstab init.d modules-boot.d openwrt_version rc.button shadow swupdate_public.pem wifi$ cat /etc/main #!/bin/sh amixer sset 'Headphone volume' 100% while [ 1 ] do aplay /ok.wav done
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@lovehex99
開機後, 插上 USB Type-C, 然後使用 adb devices 看看是否走找到裝置, 如果有找到裝置, 你可以用 adb shell 進去裝置, 然後執行 /etc/main 腳本~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
iriver D88 UART 跟 音頻共用, 所以預設並沒有訊息輸出, 君正這個驅動比較舊, 建議使用 Win7 x86 系統刷機的, 另外, GitHub 是目前主要存放檔案的地方, 如果無法存取的話, 你只能請人幫忙搬移了~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@lovehex99
Tina-Linux 預設的 GPT 是配置 16GB, 你的 MicroSD卡是 4GB, 請使用 16GB 以上的 MicroSD 測試Device Start End Sectors Size Type /dev/sdb1 73728 74231 504 252K Microsoft basic data /dev/sdb2 74232 74735 504 252K Microsoft basic data /dev/sdb3 74736 75239 504 252K Microsoft basic data /dev/sdb4 75240 95719 20480 10M Microsoft basic data /dev/sdb5 95720 144359 48640 23.8M Microsoft basic data /dev/sdb6 144360 166759 22400 11M Microsoft basic data /dev/sdb7 166760 176999 10240 5M Microsoft basic data /dev/sdb8 178176 31115263 30937088 14.8G Microsoft basic data
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
iriver D88 如果超過 25元, 就不建議入手~
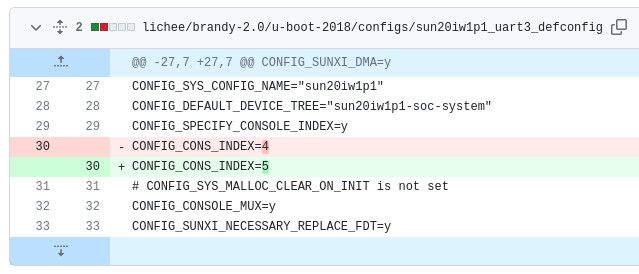
司徒接著說明一下 Boot Loader 移植的步驟,幸好司徒一開始沒有把話說死, 哈, 因為如果要重新移植一個新的 Boot Loader, 那可能要花上好幾個月, 哈, 所以司徒打算直接拿 Tina-Linux 來做說明就好, 真是太輕鬆了~哈
BOOT0、OpenSBI 的 UART 腳位配置

U-Boot 的 UART 腳位配置
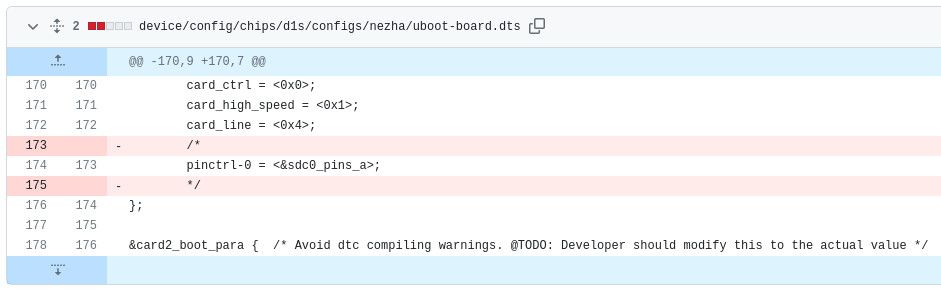
U-Boot 的 MicroSD 腳位配置
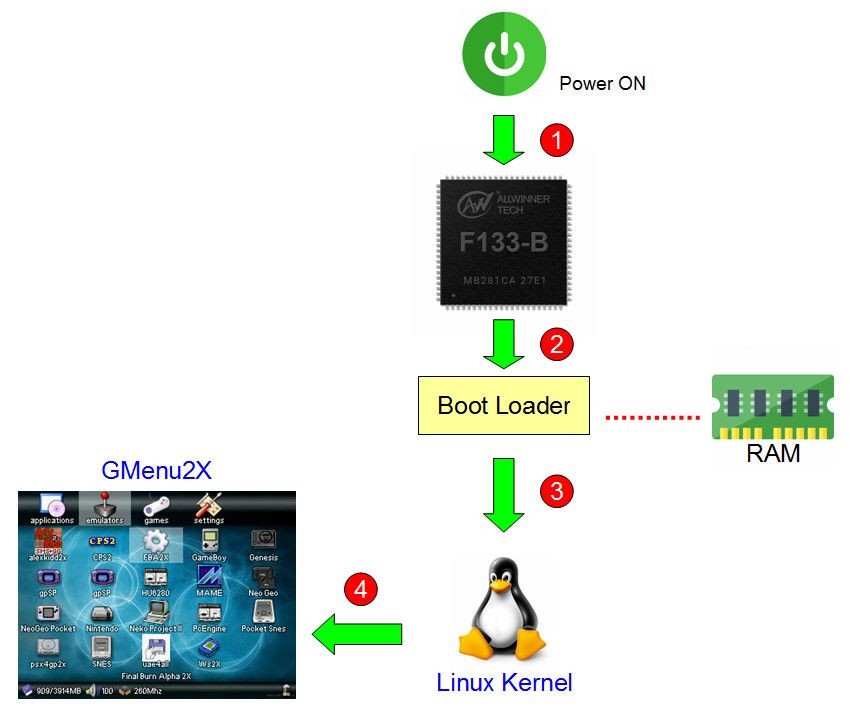
由於是 Boot Loader 移植,司徒有必要解說一下 Boot Loader 的用途是什麼,從下圖可以知道,最簡單的 Boot Loader 就是初始化 RAM、關閉中斷、關閉 Cache 後,將 Linux Kernel 載入 RAM,然後執行 Linux Kernel,這就是 Boot Loader 的主要工作~
但是 RISC-V 的 Boot Loader 其實稍微複雜一點點,如下圖所示,主要有三個部份組成 Boot Loader:LOADER(BOOT0)、OpenSBI、BOOTLAODER(U-Boot)
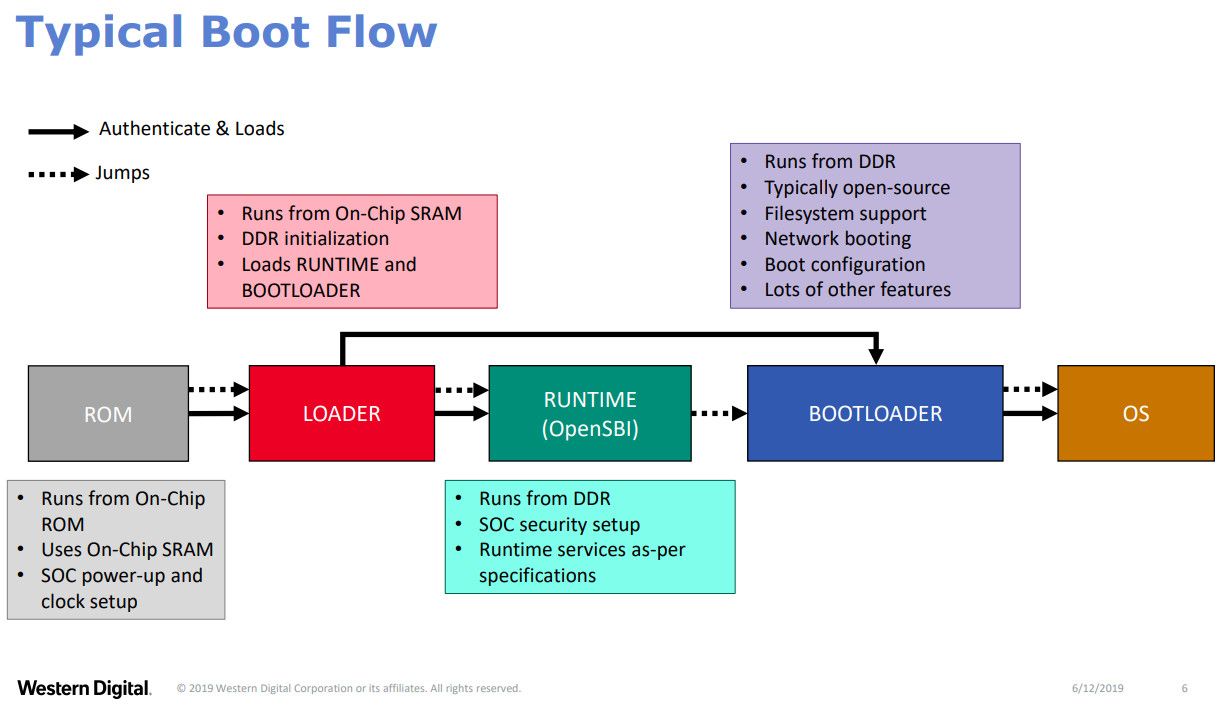
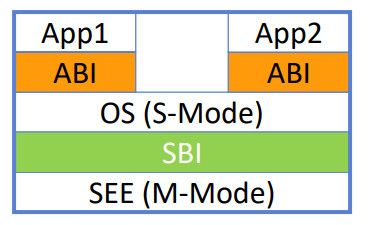
相較於 ARM,RISC-V 多了一個 OpenSBI,那 OpenSBI 是什麼呢?其實 OpenSBI 主要用來做權限轉移,從低權限切到高權限執行硬體的相關操作,雖然這部份可以實作在 Kernel 中,不過 RISC-V 看來有想要抽象化硬體的概念,一旦將硬體抽象化,代表將來只要實作 OpenSBI,就可以達到兼容執行在不同廠家的晶片上,不過司徒也是剛接觸 RISC-V,既然大家都這樣使用,那就只好跟隨大家~
司徒畫了一張 F133 的啟動流程,用來對照一下
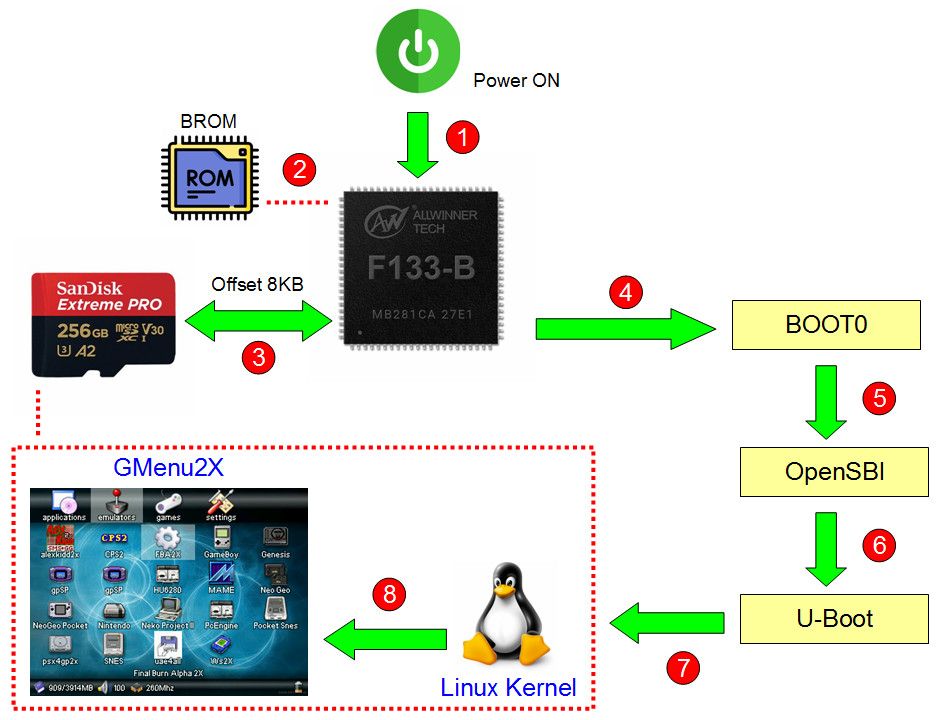
步驟1. 上電後,F133 開始跑
步驟2. F133 將晶片內部的 BROM 載入到 SRAM,然後從 SRAM 開始跑
步驟3. BROM 接著開始尋找可以使用的媒介,小志掌機只有 MicroSD,因此,BROM 會從 MicroSD 的 8KB 位址載入程式到 SRAM 執行
步驟4. F133 第一個執行的程式是 BOOT0
步驟5. BOOT0 主要用來初始化 RAM 並且執行 OpenSBI
步驟6. OpenSBI 執行後,會載入 U-Boot 並且將控制權交給 U-Boot
步驟7. U-Boot 會從 MicroSD 載入 Linux Kernel、Device Tree 到 RAM,接著執行 Linux Kernel
步驟8. Linux Kernel 會依據 BOOTCMD 載入 rootfs 並且將控制權交給 init 程式,init 是 Linux 作業系統的第一個執行程式
由於 BOOT0 是第一個執行的程式,司徒額外畫了一個執行流程圖
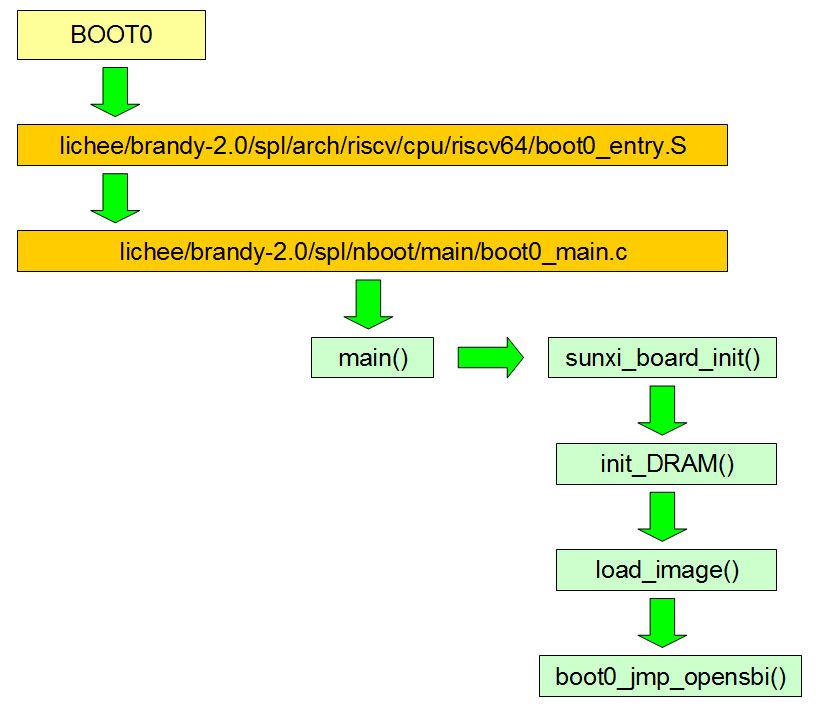
雖然 Boot Loader 流程大致清楚,不過,司徒還是需要說一下,一開始提到的 UART 配置修改,究竟這些修改是設定到哪邊去呢?其實位於 lichee/brandy-2.0/spl/nboot/main/boot0_head.cconst boot0_file_head_t BT0_head = { { /* jump_instruction*/ JUMP_INSTRUCTION, BOOT0_MAGIC, STAMP_VALUE, #ifdef ALIGN_SIZE_8K 0x2000, #else 0x4000, #endif sizeof(boot_file_head_t), BOOT_PUB_HEAD_VERSION, CONFIG_BOOT0_RET_ADDR, CONFIG_BOOT0_RUN_ADDR, 0, { /*brom modify: nand-4bytes sdmmc-2bytes*/ 0, 0, 0, 0, '4', '.', '0', 0 }, }, { /*__u32 prvt_head_size;*/ 0, /*char prvt_head_vsn[4];*/ 1, 0,/* power_mode */ {0},/* reserver[2] */ /*unsigned int dram_para[32] ;*/ {0}, /*__s32 uart_port;*/ 0, /*normal_gpio_cfg uart_ctrl[2];*/ { {6, 2, 4, 1, 1, 0, {0} },/*PB8: 4--RX*/ {6, 4, 4, 1, 1, 0, {0} },/*PB9: 4--TX*/ }, /*__s32 enable_jtag;*/ 0, /*normal_gpio_cfg jtag_gpio[5];*/ {{0}, {0}, {0}, {0}, {0} },Tina-Linux 使用 Patch 方式,將配置的數值更新到 boot0_header,雖然作法粗暴,不過卻是最簡單的配置替換作法,缺點就是不好獨立拆開使用
如果想要手動編譯看看, 可以使用如下方式 (已經改好 UART 配置)$ cd $ git clone https://github.com/steward-fu/tina-linux_sdk $ cd tina-linux_sdk $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.001 $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.002 $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_toolchain.tar.gz $ tar xvf https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_toolchain.tar.gz $ 7za x https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.001 $ source ./build/envsetup.sh $ lunch You're building on Linux Lunch menu... pick a combo: 1. d1-h_nezha_min-tina 2. d1-h_nezha-tina 3. d1s_nezha-tina Which would you like? [Default d1s_nezha]:3 $ make $ pack /home/steward/Data/tina-linux_sdk/out/d1s-nezha/tina_d1s-nezha_uart4.img pack finishBOOT0 位於:out/d1s-nezha/image/boot0_sdcard.fex (8KB 偏移位置)
$ sudo dd if=out/d1s-nezha/image/boot0_sdcard.fex of=/dev/sdX bs=1024 seek=8OpenSBI、U-Boot 位於:out/d1s-nezha/image/boot_package.fex
$ sudo dd if=out/d1s-nezha/image/boot_package.fex of=/dev/sdX bs=1024 seek=16400開機後的 Log (baudrate: 115200bps)
[152]HELLO! BOOT0 is starting! [155]BOOT0 commit : 4654c3ec4 [158]set pll start [160]fix vccio detect value:0xc0 [163]periph0 has been enabled [166]set pll end [168][pmu]: bus read error [170]board init ok [172]ZQ value = 0x2f [174]get_pmu_exist() = -1 [177]ddr_efuse_type: 0xa [179]trefi:7.8ms [181][AUTO DEBUG] single rank and full DQ! [185]ddr_efuse_type: 0xa [187]trefi:7.8ms [189][AUTO DEBUG] rank 0 row = 13 [193][AUTO DEBUG] rank 0 bank = 4 [196][AUTO DEBUG] rank 0 page size = 2 KB [200]DRAM BOOT DRIVE INFO: V0.33 [203]DRAM CLK = 528 MHz [205]DRAM Type = 2 (2:DDR2,3:DDR3) [208]DRAMC read ODT off. [210]DRAM ODT off. [212]ddr_efuse_type: 0xa [215]DRAM SIZE =64 M [217]dram_tpr4:0x0 [219]PLL_DDR_CTRL_REG:0xf8002b00 [222]DRAM_CLK_REG:0xc0000000 [225][TIMING DEBUG] MR2= 0x0 [229]DRAM simple test OK. [231]dram size =64 [233]card no is 0 [235]sdcard 0 line count 4 [237][mmc]: mmc driver ver 2021-04-2 16:45 [247][mmc]: Wrong media type 0x0 [250][mmc]: ***Try SD card 0*** [268][mmc]: HSSDR52/SDR25 4 bit [271][mmc]: 50000000 Hz [273][mmc]: 3781 MB [275][mmc]: ***SD/MMC 0 init OK!!!*** [331]Loading boot-pkg Succeed(index=0). [335]Entry_name = opensbi [338]Entry_name = u-boot [342]Entry_name = dtb [344]mmc not para [346]Jump to second Boot. OpenSBI auto-t113-linux-V0.8-3-ge39e937 ____ _____ ____ _____ / __ \ / ____| _ \_ _| | | | |_ __ ___ _ __ | (___ | |_) || | | | | | '_ \ / _ \ '_ \ \___ \| _ < | | | |__| | |_) | __/ | | |____) | |_) || |_ \____/| .__/ \___|_| |_|_____/|____/_____| | | |_| Platform Name : T-HEAD Xuantie Platform Platform HART Features : RV64ACDFIMSUVX Platform Max HARTs : 1 Current Hart : 0 Firmware Base : 0x41fc0400 Firmware Size : 75 KB Runtime SBI Version : 0.2 MIDELEG : 0x0000000000000222 MEDELEG : 0x000000000000b1ff PMP0 : 0x0000000041fc0000-0 U-Boot 2018.07 (Jun 26 2023 - 13:32:21 +0000) Allwinner Technology [00.414]DRAM: 64 MiB [00.416]Relocation Offset is: 01ee9000 [00.420]secure enable bit: 0 can't support chip type 24064 [00.426]CPU=720 MHz,PLL6=600 Mhz,AHB=200 Mhz, APB1=100Mhz MBus=300Mhz sunxi flash map init SPI ALL: ready [00.437]flash init start [00.439]workmode = 0,storage type = 1 [00.443][mmc]: mmc driver ver uboot2018:2021-12-20 13:35:00 [00.448][mmc]: get sdc_type fail and use default host:tm1. [00.455][mmc]: can't find node "mmc0",will add new node [00.460][mmc]: fdt err returned <no error> [00.464][mmc]: Using default timing para [00.467][mmc]: SUNXI SDMMC Controller Version:0x50310 [00.494][mmc]: card_caps:0x3000000a [00.497][mmc]: host_caps:0x3000003f [00.504]sunxi flash init ok [00.507]line:703 init_clocks [00.510]drv_disp_init request pwm success, pwm7:pwm7:0x2000c00. [00.532]drv_disp_init finish GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** [00.564]Loading Environment from SUNXI_FLASH... GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** Can't find env partition *** Warning - no device, using default environment Failed (-19) [00.604]boot_gui_init:start [00.607]set disp.dev2_output_type fail. using defval=0 [00.635]set disp.fb0_rot_used fail. using defval=0 [00.639]set disp.fb0_rot_degree fail. using defval=0 [00.810]boot_gui_init:finish GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** partno erro : can't find partition bootloader GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get[00.868]LCD open finish _info_efi: *** ERROR: Invalid Backup GPT *** partno erro : can't find partition boot-resource [00.879]Get bootloader and boot-resource partition number fail! [00.884]out of usb burn from boot: not need burn key cann't get the boot_base from the env [00.903]Item0 (Map) magic is bad [00.906]the secure storage item0 copy0 magic is bad [00.911]Item0 (Map) magic is bad [00.914]the secure storage item0 copy1 magic is bad [00.918]Item0 (Map) magic is bad GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** partno erro : can't find partition private GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** [00.980]update part info GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** [01.009]update bootcmd GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid GPT *** GUID Partition Table Header signature is wrong: 0x0 != 0x5452415020494645 part_get_info_efi: *** ERROR: Invalid Backup GPT *** [01.069]change working_fdt 0x42aa8da0 to 0x42a88da0 disable nand error: FDT_ERR_BADPATH [01.079]The storage not support sample function No reserved memory region found in source FDT [01.113]update dts Hit any key to stop autoboot: 2
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@lovehex99
慢慢來~急什麼呢!哈哈~
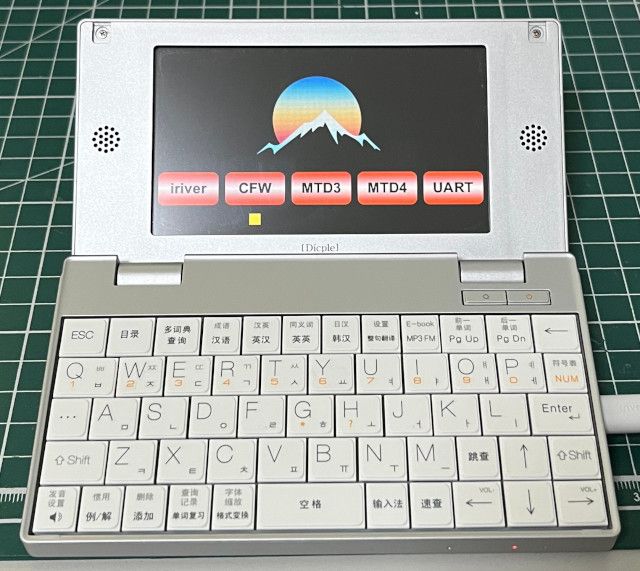
由於司徒臨時被插入一個很緊急的事件, 所以導致進度緩慢了一些, 而這個事件就是有人發現 iriver D88 只賣 25元, 真是太佛心了~所以司徒只好先抽身去搞 iriver D88 系統的東西, 實在是逼不得已~哈~不過, 目前應該是搞定了, 所以就分享一下結果給大家~
司徒紀錄所有移植過程在這裡
https://steward-fu.github.io/website/umpc.htm#d88
所有源碼以及資源在這裡
https://github.com/steward-fu/archives/releases/tag/d88
不錯的質感

下邊

耳機孔

上邊
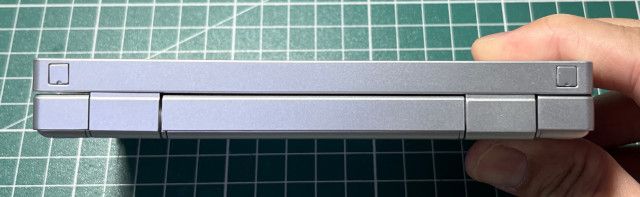
MicroSD、MiniUSB

相當不錯的鍵盤

背面

背蓋

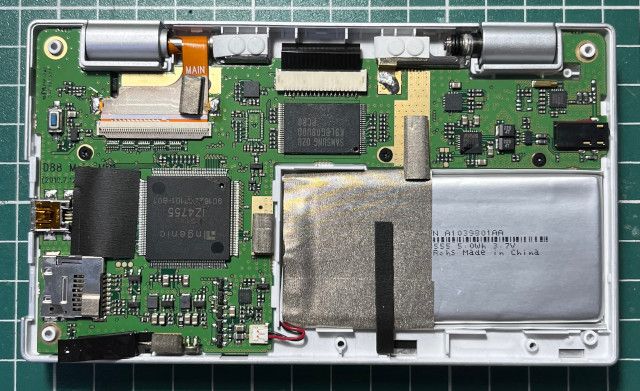
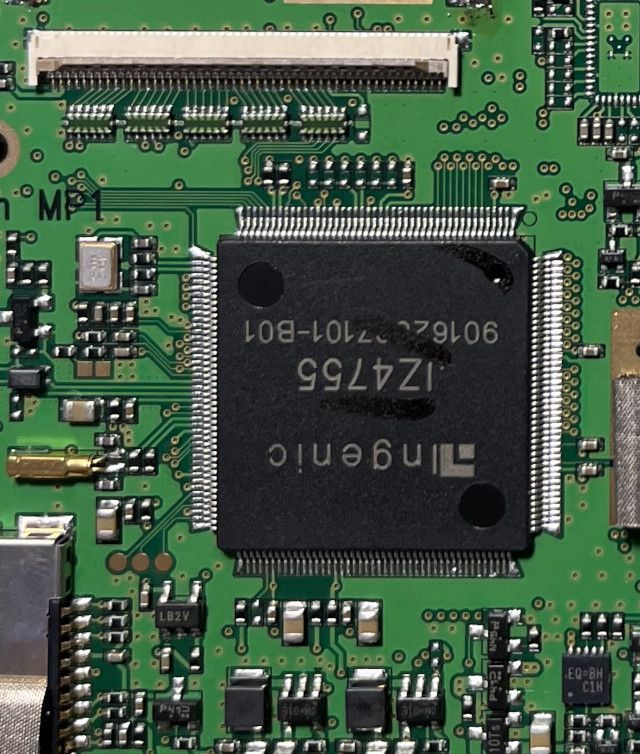
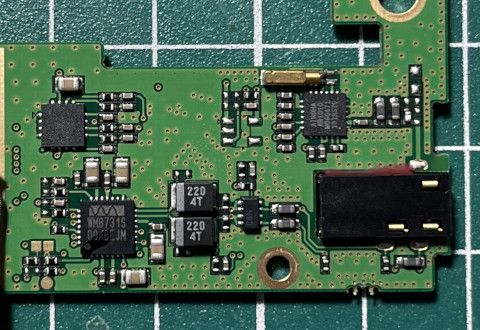
PCB
C面

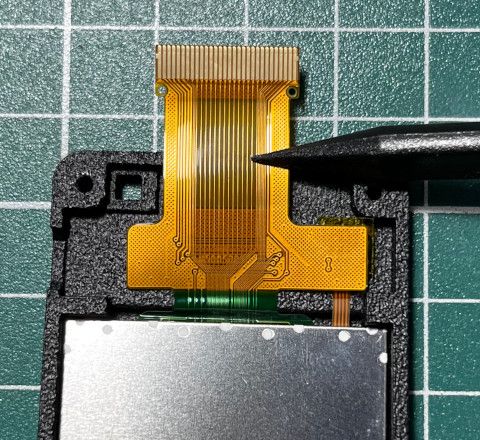
LMS430HF15

屏FPC
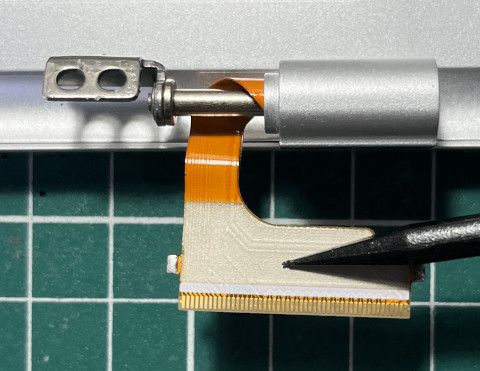
鍵盤FPC
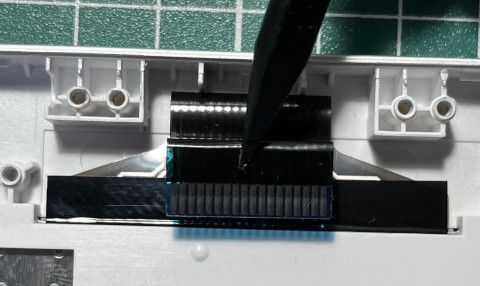
鍵盤
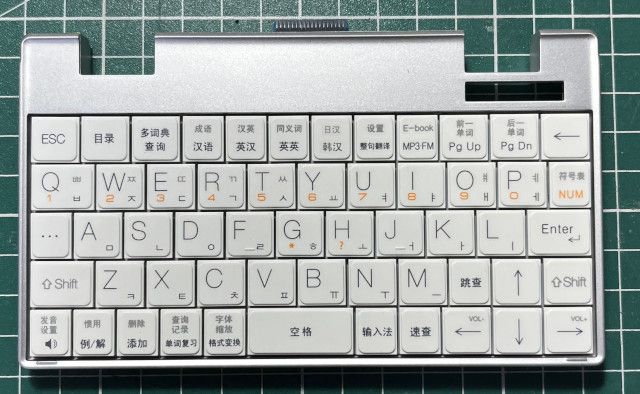
正面
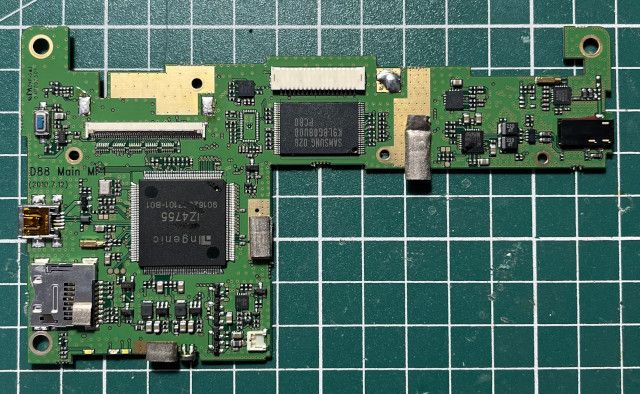
JZ4755
STMPE2403、K9LBG08U0D

WM8731、AR1010
正面
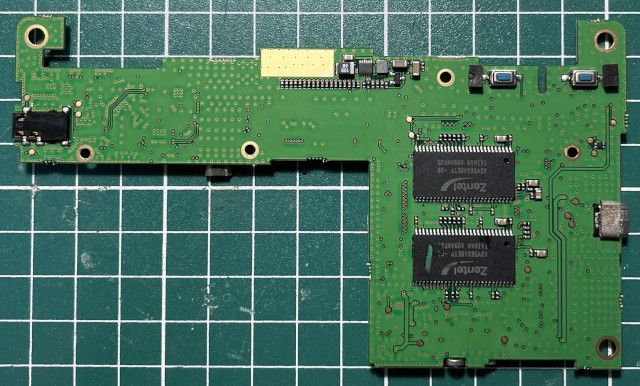
A3V56S40ETP-G6

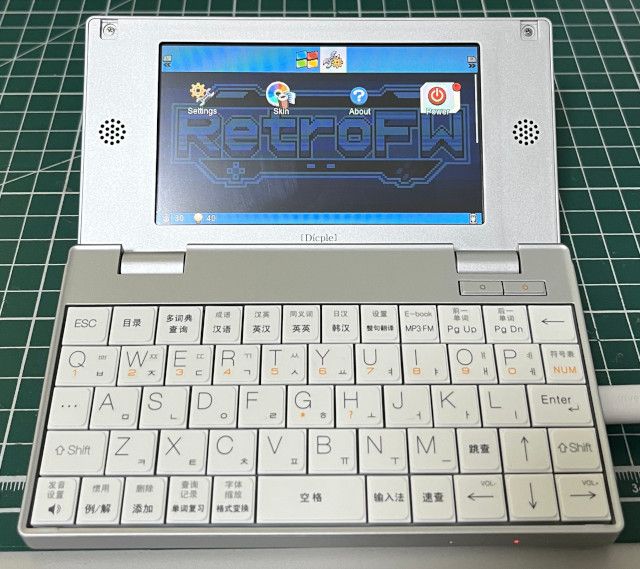
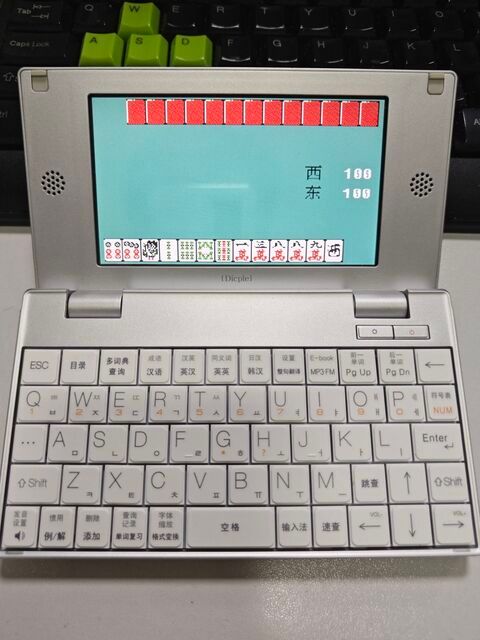
由於機器已經 10 年沒有開機, 因此, 經過 5A55, 萬光明 的努力, 已經可以成功還原官方系統
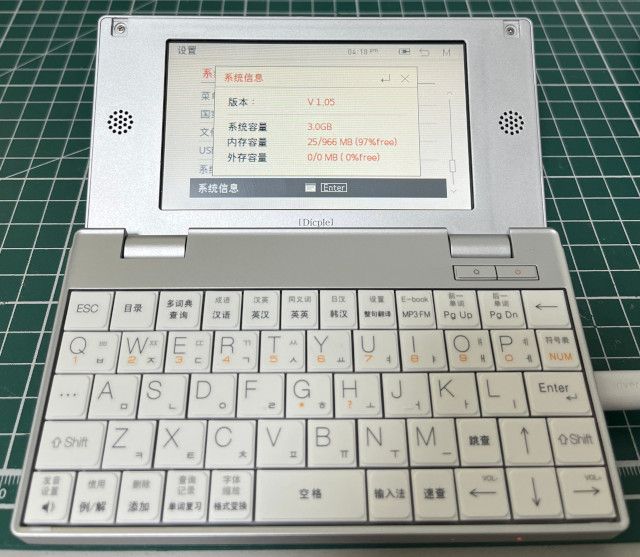
司徒寫了一個雙系統啟動介面, 也可以透過 USB Gadget Serial (UART) 進去機器 Debug
RetroFW 也移植完成, 聲音, 按鍵, 背光, 蓋上待機, 應該都可以正常運作了~由於官方鍵盤驅動有卡鍵及延遲等問題, 因此, 在 鉗工 的協助下, 我們逆向官方內核並且打了補丁, 修正官方驅動程式的問題~

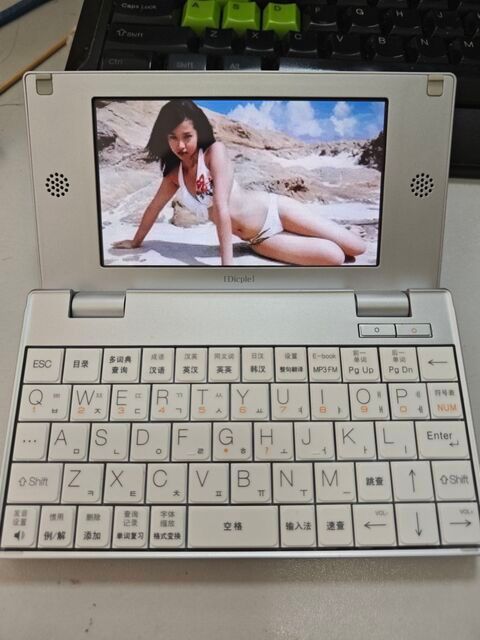
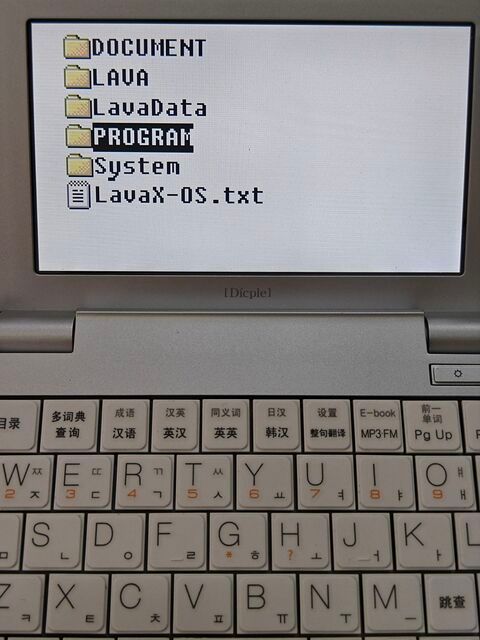
再來則是 詩諾比 的 Lava 移植

-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
第二版的機器(新增兩顆振動馬達)終於收到,感謝暈哥以及lovexulu的協助

在Pyra掌機的身旁,更是感覺小巧~

材質還不錯~

USB Type-C、耳機孔

電源開關

R、MicroSD、L

音量鍵

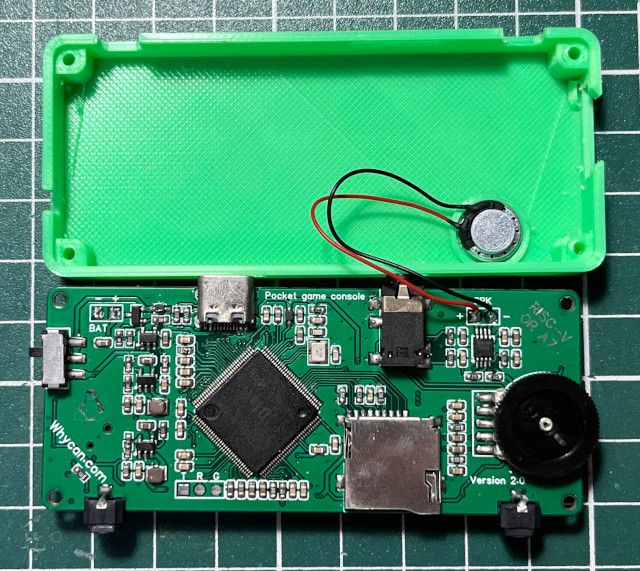
背面

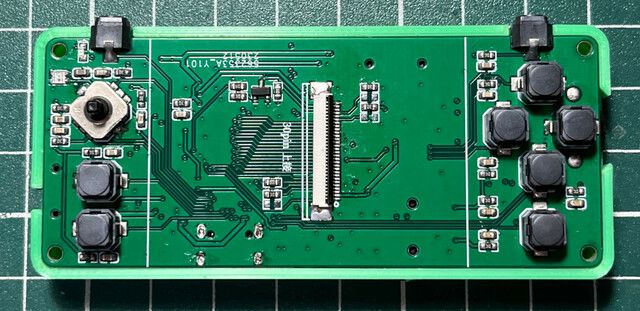
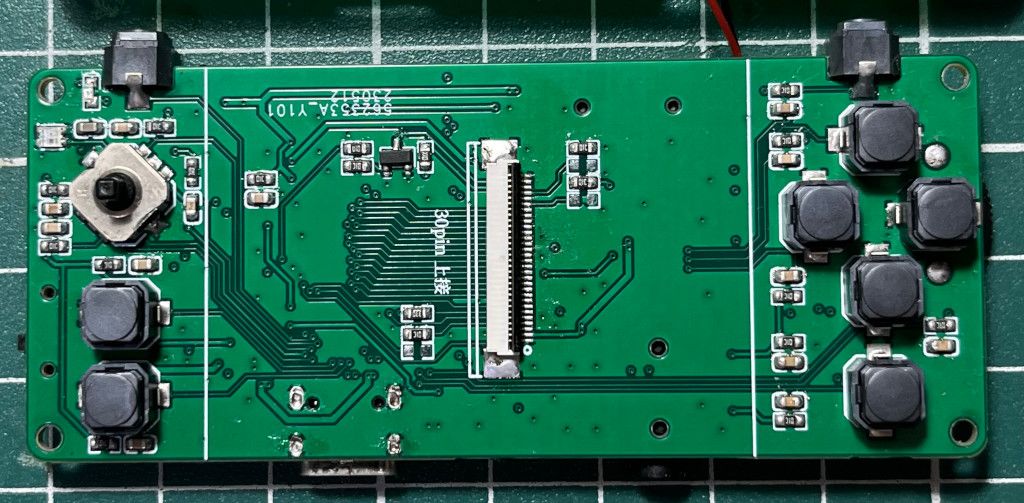
A面

FPC
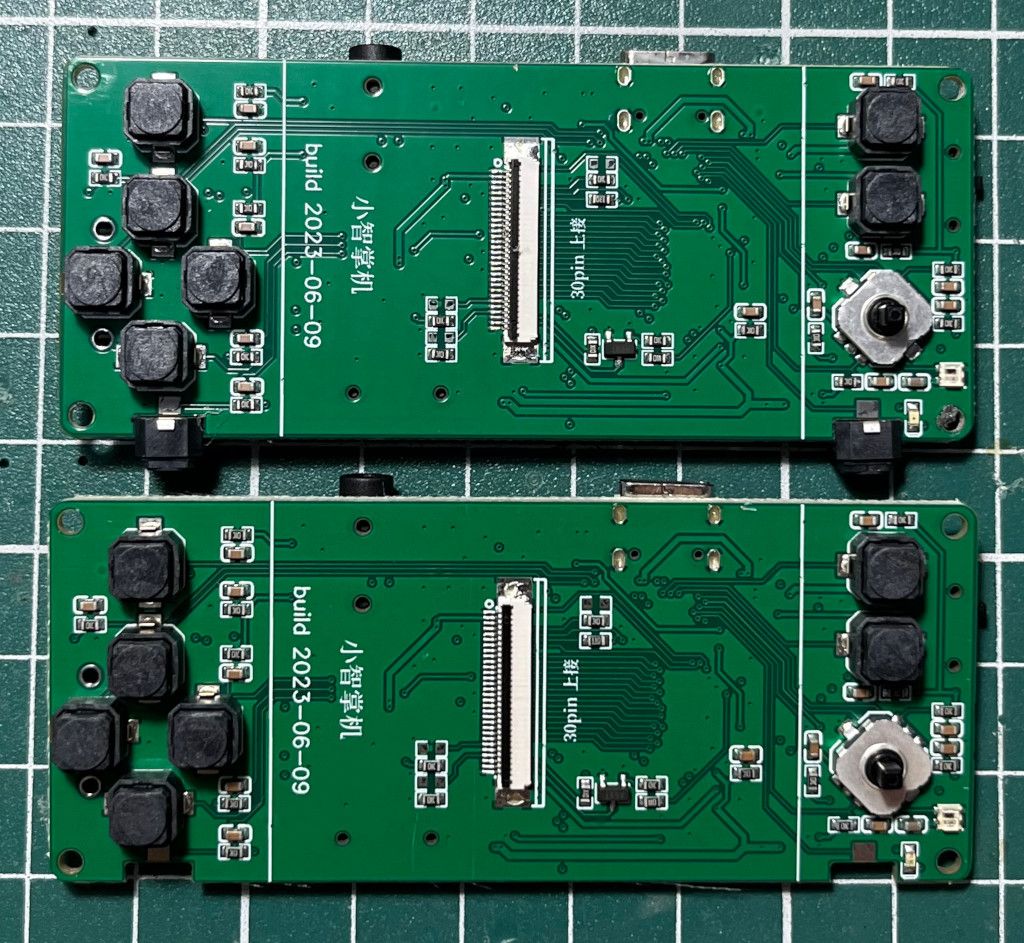
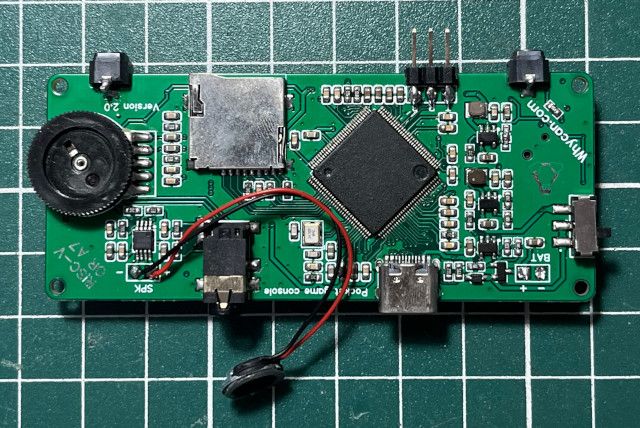
PCB
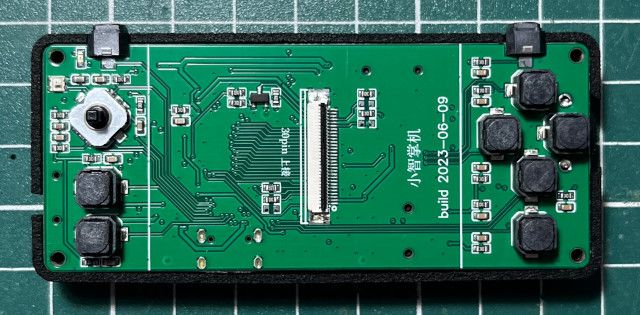
電源按鍵記得往下扳才能取出主板
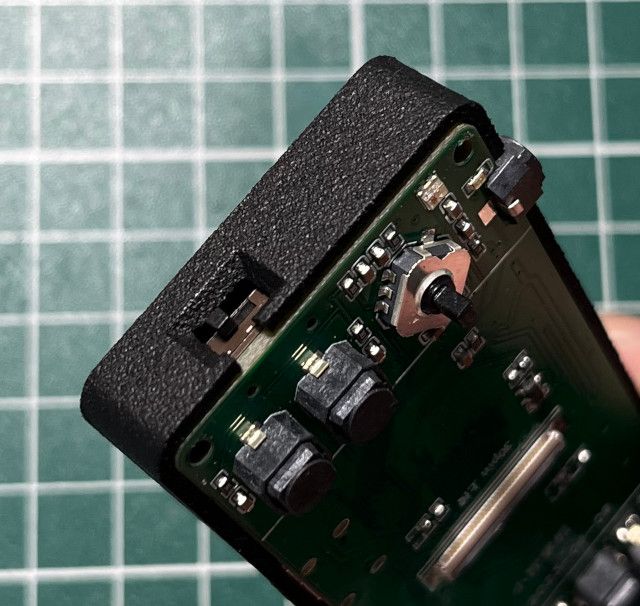
正面

新增振動馬達的槽位

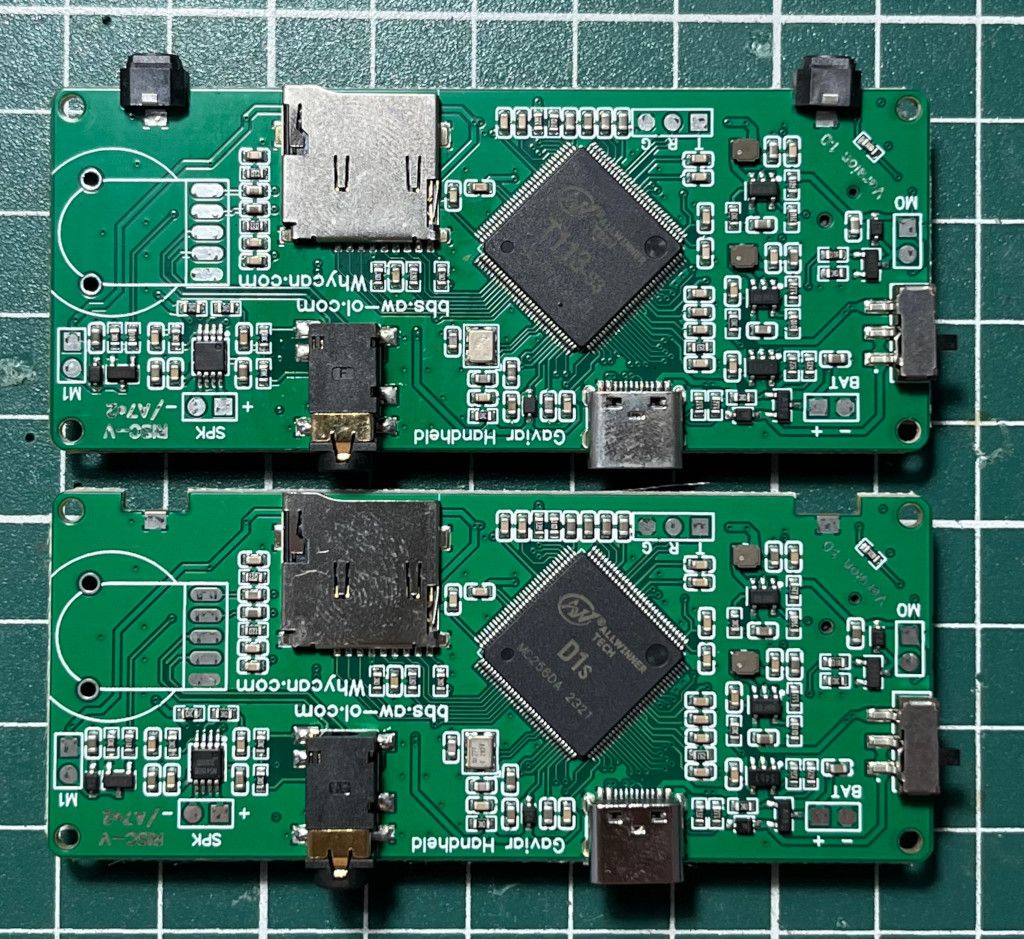
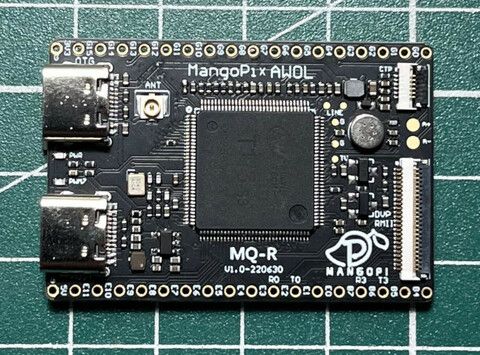
D1s (單核心RISC-V RV64GCV 533MHz, RAM 64MB)
F133 (單核心 RISC-V RV64GCV 533MHz, RAM 64MB)
T113-S3 (双核心 Cortex-A7 1.2GHz, RAM 128MB)
以上 3 顆晶片的腳位都是相容腳位,因此,玩家也可以替換成高效能的 T113-S3 進行移植
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
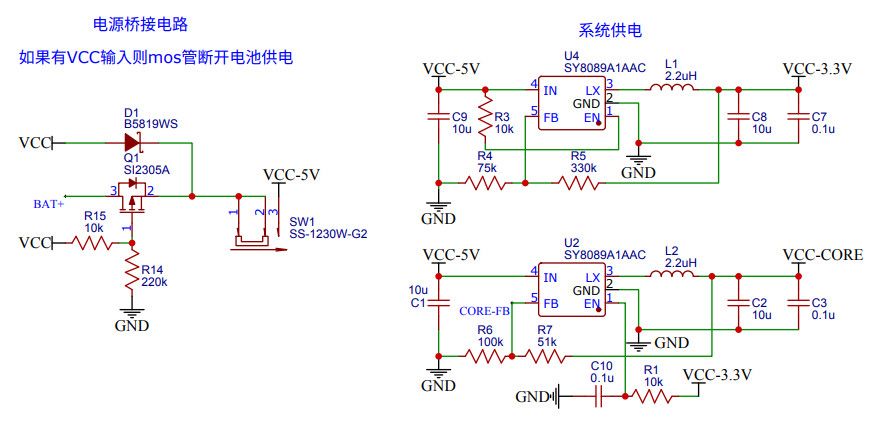
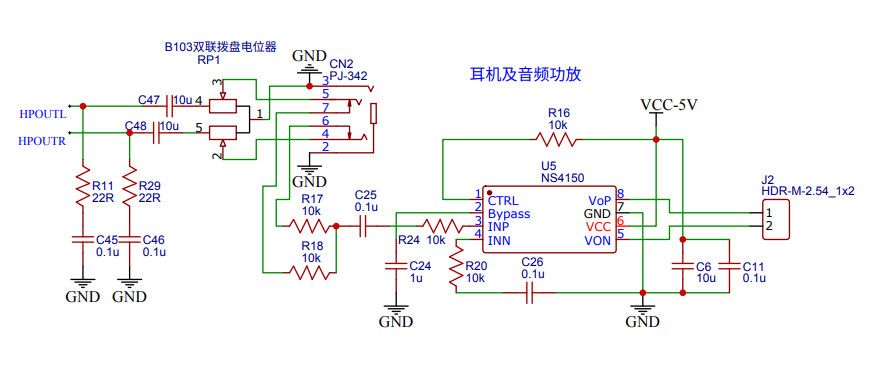
司徒接著說明一下如何編譯 Tina-Linux 做聲音測試, 不過在編譯 Tina-Linux 之前, 我們先來看一下小志掌機的聲音電路
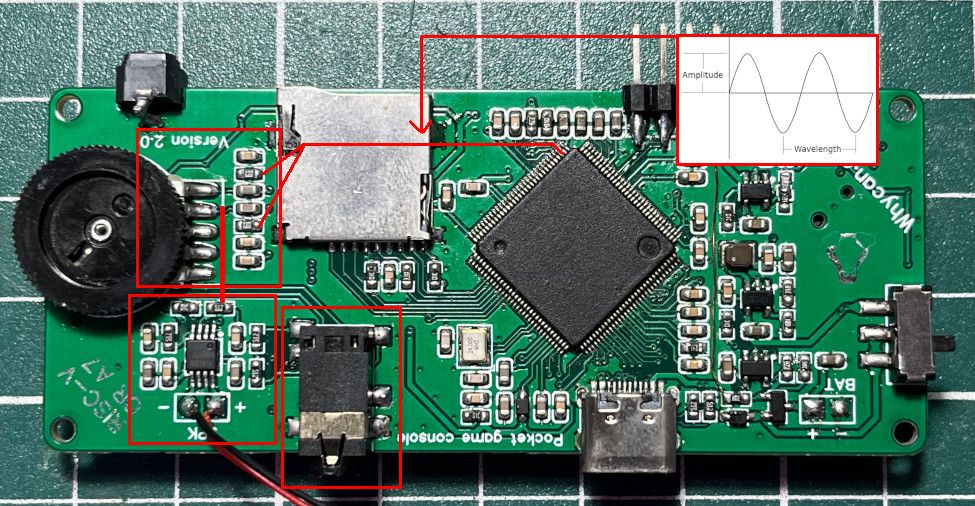
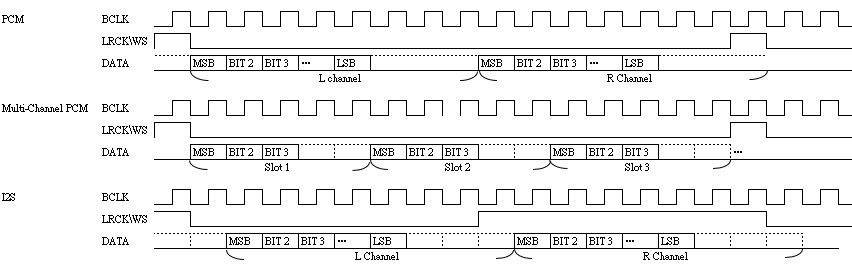
上圖是一般最常使用的聲音電路, 直接從晶片的聲音輸出(類比訊號)拉到功率放大器, 由於是類比訊號, 因此, 在走線的過程中, 很容易受到干擾, 這方面的佈線, 比較需要經驗的累積, 當然, 如果要有比較好的聲音效果, 一般建議使用專門的 Audio Codec 晶片, 而使用的介面可以使用 I2S or PCM, 訊號傳遞的部份使用數位訊號, 可以有效抑制雜訊, 如下圖所示, 不過缺點就是需要移植聲音驅動, 這部份也是比較費時~
司徒接著說明如何編譯 Tina-Linux for F133, 首先, 感謝 lovexulu 的協助,提供 Tina-Linux 的移植結果給司徒參考,由於 Tina-Linux 下載相當費時也比較麻煩,因此,司徒將其搬遷到 GitHub,編譯步驟如下:$ cd $ git clone https://github.com/steward-fu/tina-linux_sdk $ cd tina-linux_sdk $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.001 $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.002 $ wget https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_toolchain.tar.gz $ tar xvf https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_toolchain.tar.gz $ 7za x https://github.com/steward-fu/archives/releases/download/f133/tina-linux_sdk_dl.7z.001 $ source ./build/envsetup.sh $ lunch You're building on Linux Lunch menu... pick a combo: 1. d1-h_nezha_min-tina 2. d1-h_nezha-tina 3. d1s_nezha-tina Which would you like? [Default d1s_nezha]:3 $ make $ pack /home/steward/Data/tina-linux_sdk/out/d1s-nezha/tina_d1s-nezha_uart4.img pack finish
燒錄步驟:- 下載 https://github.com/steward-fu/archives/releases/download/f133/PhoenixCardv4.2.7.7z 並且解壓縮
- 執行 PhoenixCard.exe
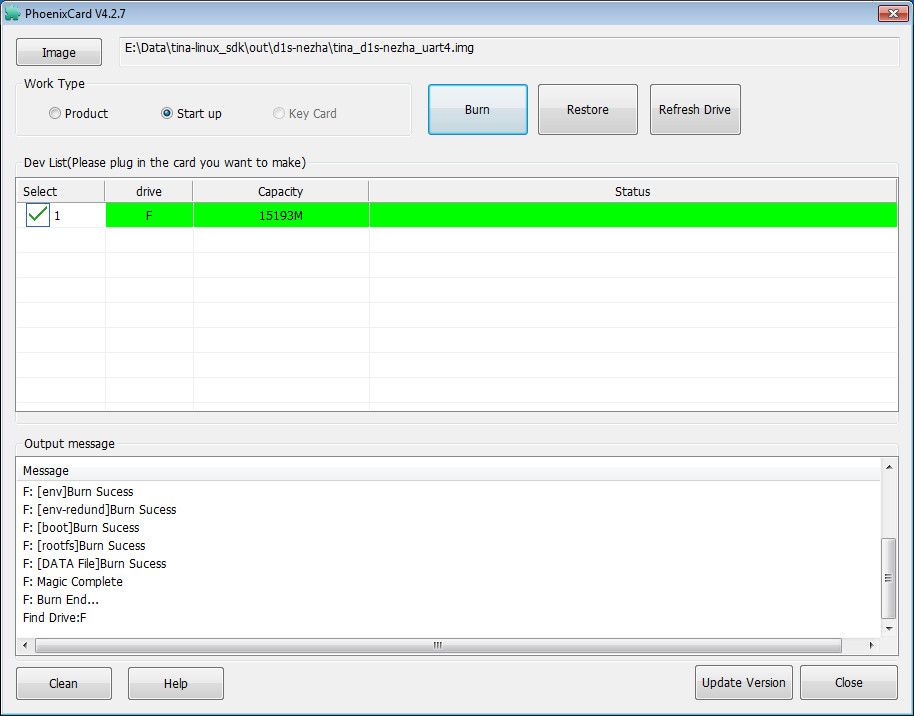
- 選擇好 Image、Start up 後,按下 Burn 開始燒錄
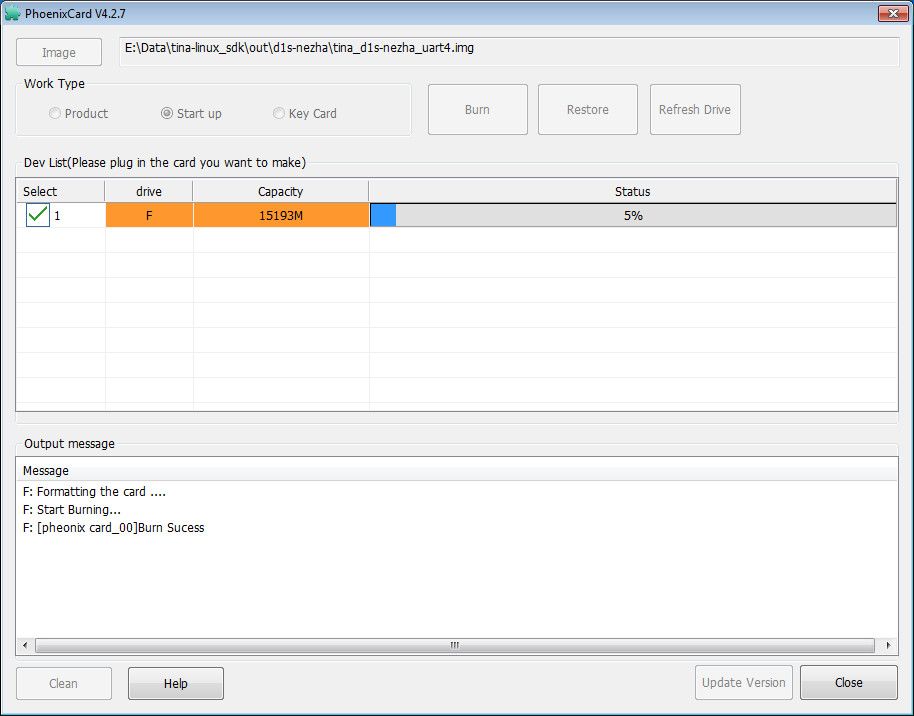
燒錄完成
預設分區如下圖,如果想要使用自己編譯的 buildroot 系統,只要替換到 rootfs 分區就可以,不過預設只有 25MB
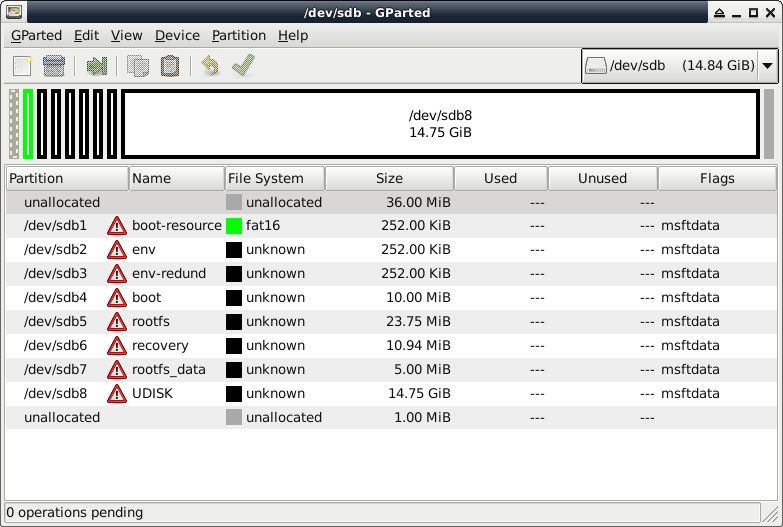
對 /dev/sdb8 進行擴充,這樣就可以放檔案進入測試
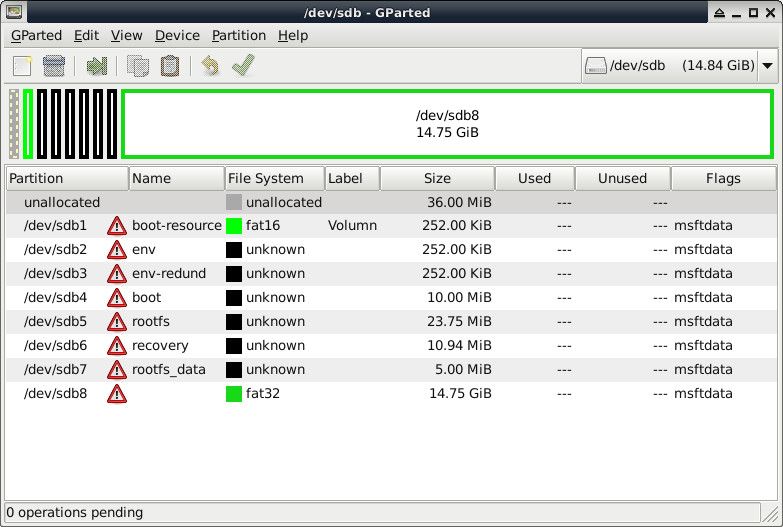
開機後,可以直接使用 adb shell 進入 console, 接著就可以手動測試聲音部份~
$ adb devices * daemon not running; starting now at tcp:5037 * daemon started successfully List of devices attached 20080411 device $ adb shell BusyBox v1.27.2 () built-in shell (ash) ------run profile file----- _____ _ __ _ |_ _||_| ___ _ _ | | |_| ___ _ _ _ _ | | _ | || | | |__ | || || | ||_'_| | | | || | || _ | |_____||_||_|_||___||_,_| |_| |_||_|_||_|_| Tina is Based on OpenWrt! ---------------------------------------------- Tina Linux (Neptune, 61CC0487) ---------------------------------------------- nodev debugfs root@TinaLinux:/# root@TinaLinux:/# mount /dev/mmcblk0p8 /mnt/UDISK/ root@TinaLinux:/# amixer sset 'Headphone volume' 100% Simple mixer control 'Headphone volume',0 Capabilities: volume volume-joined Playback channels: Mono Capture channels: Mono Limits: 0 - 7 Mono: 7 [100%] root@TinaLinux:/# aplay /mnt/UDISK/ok.wav Playing WAVE '/mnt/UDISK/ok.wav' : Signed 16 bit Little Endian, Rate 11025 Hz, Mono
如果不想手動編譯, 司徒這邊有做好的聲音測試檔案
https://github.com/steward-fu/archives/releases/download/f133/sound_test.img.7z
解開後, 使用 dd 命令燒錄到 MicroSD 卡後, 插入開機, 就會開始播放 Nokia 手機鈴聲~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
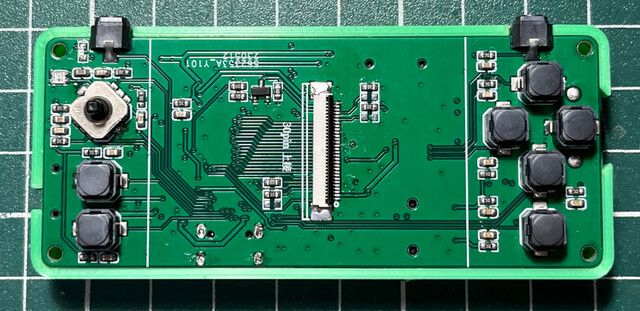
司徒接著說明如何驗證按鍵功能,不過,在進行按鍵驗證之前,我們必須先了解一下按鍵的一些細節,這樣才會更了解按鍵特性,一般掌機使用的按鍵,大部分都是使用十字鍵、4 個功能鍵、SELECT、START、L、R 等按鍵,這也是早期 Nintendo 掌機的標準配備,而用來耦合按鍵和 PCB 的橋樑則是以導電膠、鍋仔片為大宗,這些看似簡單的東西,其實背後隱藏的許多設計的小細節,司徒嘗試來解說一下過程,下圖是 NDSL 掌機的 PCB 圖片

從上圖可以發現一個設計小細節,十字鍵的 PCB 缺口,它的長相跟 4 個功能鍵並不一致,這是因為十字鍵是連通按鍵(上下左右連在一起),而 4 個功能鍵則是各自分開的按鍵,因此,當十字鍵的其中一個方向被按下時,其餘方向也會受影響,因此 PCB 設計必須做些保護措施,避免鬼鍵的問題發生
司徒使用如下圖片說明一下鬼鍵發生的過程,當十字鍵的下方向被按下時,左、右方向的按鍵也會稍微往下傾斜,所以最壞的情況下,系統將會收到下、左、右三個按鍵的訊息
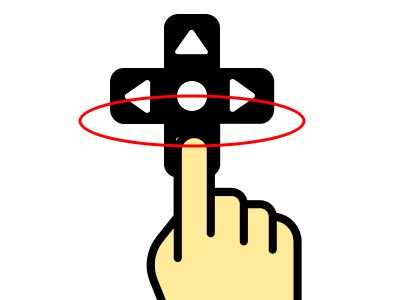
十字鍵正常位置

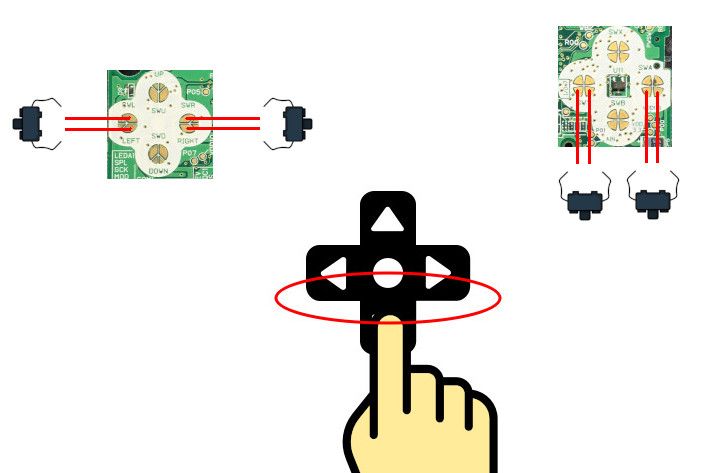
下方鍵被按下時,左、右方向的按鍵也往下傾斜,說明導電膠會有誤觸到 PCB 的狀況發生

因此,為了避免十字鍵的鬼鍵問題,十字鍵的 PCB 缺口必須依照方向做適當排列,這樣就可以避免誤觸的問題,如下圖所示,十字鍵的左右按鍵會設計成上下導通,而十字鍵的上下按鍵則會設計成左右導通
至於鍋仔片,由於導通點是位於中央,因此,十字鍵的鬼鍵問題得以改善


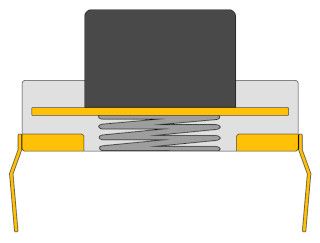
下圖是小志掌機使用的按鍵,由於按壓力道需要比較用力,因此,這種按鍵比較少用於掌機,不過,如果使用此類的按鍵,則需要注意彈跳的問題
一般按鍵使用彈片做導通,如下所示
因此,按下或者放開時,會有一段不穩定的彈跳時間,如下圖所示,這就是一般按鍵的彈跳問題
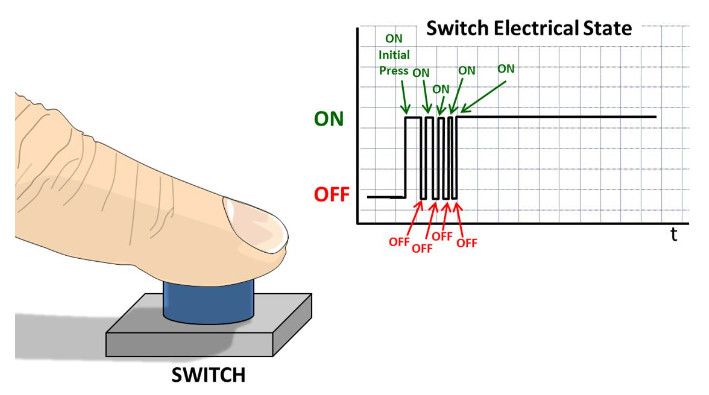
針對軟體的解法,可以延遲一段時間後,一般是 10ms,接著再判斷按鍵是否確實被按下
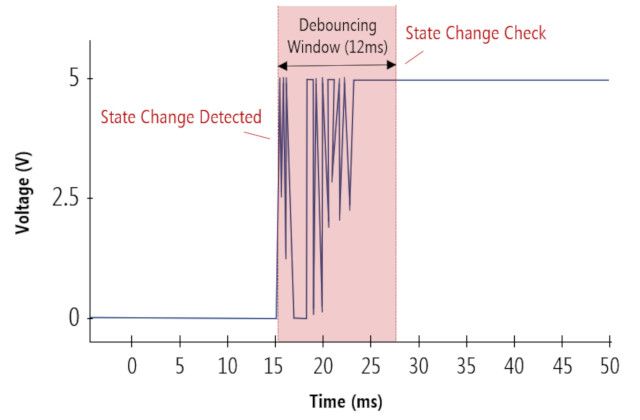
針對硬體的解法,最常見到的作法就是 RC 濾波,在按鍵旁邊加上電容,基於 10ms 計算,最常使用的是:10K 電阻 + 1uF 電容、47K 電阻 + 220nF 電容,透過電容的充、放電效應,來修飾爬升曲線
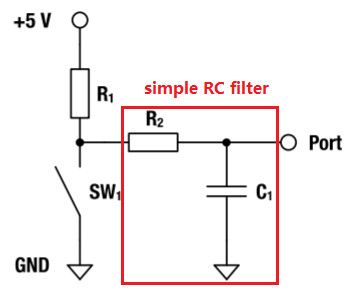
市面上,有些晶片已經有內建 Debounce 功能,這樣就可以很方便解決按鍵彈跳問題
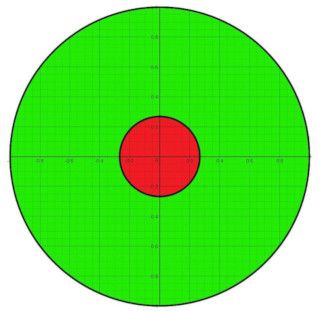
當然,有些掌機會使用類比搖桿當作十字鍵使用,如:Caanoo 掌機(類比電阻)、Neo Geo Pocket 掌機(4 顆按鍵),如果是使用 4 顆按鍵則可以使用如上的彈跳解法,但是,如果是使用類比電阻,則需要加入 Dead Zone 判斷,避免漂移問題

Dead Zone 一般用於無效區域設定,當類比搖桿的移動是處於這些區域時,則不會發送任何移動訊號,而類比搖桿最常遇到就是靜止不動時,搖桿自動漂移(鬼鍵問題),因此,如果使用類比搖桿當作十字鍵使用時,記得加入 Dead Zone 判斷,避免漂移問題發生

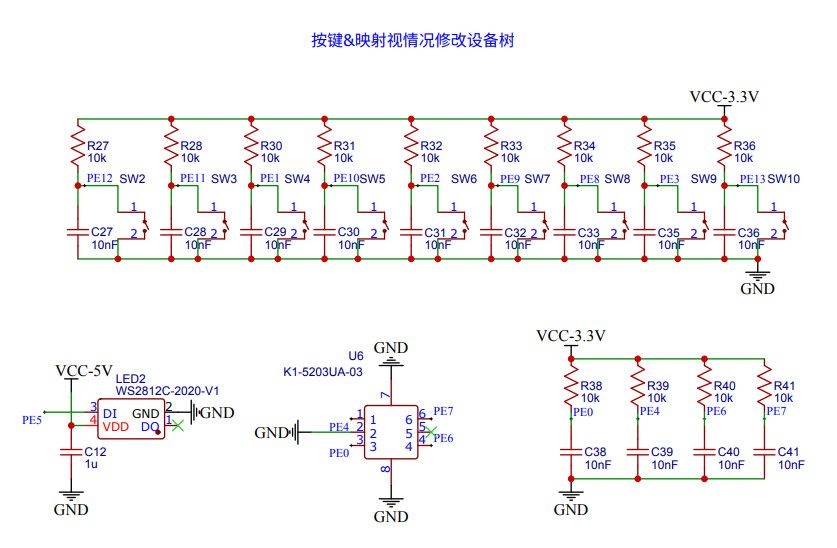
按鍵電路
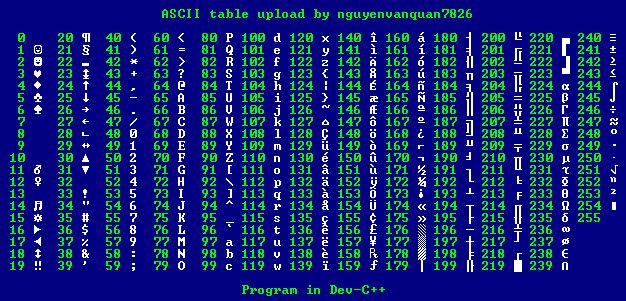
ASCII 字型
對應按鍵
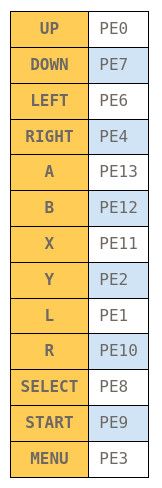
main.s.global _start .equ GPIO_BASE, 0x02000000 .equ PD_CFG0, 0x0090 .equ PD_CFG1, 0x0094 .equ PD_CFG2, 0x0098 .equ PD_DAT, 0x00a0 .equ PE_CFG0, 0x00c0 .equ PE_CFG1, 0x00c4 .equ PE_DAT, 0x00d0 .equ LCD_RST, (1 << 0) .equ LCD_WR, (1 << 18) .equ LCD_RS, (1 << 19) .equ LCD_RD, (1 << 20) .equ LCD_CS, (1 << 21) .equ LCD_BL, (1 << 22) .equ _250MS, 50000000 .equ _500MS, 100000000 .equ _1S, 200000000 .equ BG, 0x0000 .equ FG, 0xffff .text .long 0x4000006f .byte 'e','G','O','N','.','B','T','0' .long 0x5F0A6C39 .long 0x8000 .long 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .org 0x0400 _start: li t0, 0x00000000 li a0, GPIO_BASE + PE_CFG0 sw t0, 0(a0) li a0, GPIO_BASE + PE_CFG1 sw t0, 0(a0) li t0, 0x11111111 li a0, GPIO_BASE + PD_CFG0 sw t0, 0(a0) li a0, GPIO_BASE + PD_CFG1 sw t0, 0(a0) li a0, GPIO_BASE + PD_CFG2 sw t0, 0(a0) li t0, 0xffffffff li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) jal lcd_rst li t0, 0xb2 jal lcd_cmd li t0, 0x5c jal lcd_dat li t0, 0x5c jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0xb7 jal lcd_cmd li t0, 0x35 jal lcd_dat li t0, 0x21 jal lcd_cmd li t0, 0x11 jal lcd_cmd li t0, _250MS jal delay li t0, 0xe0 jal lcd_cmd li t0, 0xd0 jal lcd_dat li t0, 0x06 jal lcd_dat li t0, 0x0b jal lcd_dat li t0, 0x07 jal lcd_dat li t0, 0x07 jal lcd_dat li t0, 0x24 jal lcd_dat li t0, 0x2e jal lcd_dat li t0, 0x32 jal lcd_dat li t0, 0x46 jal lcd_dat li t0, 0x37 jal lcd_dat li t0, 0x13 jal lcd_dat li t0, 0x13 jal lcd_dat li t0, 0x2d jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0xe1 jal lcd_cmd li t0, 0xd0 jal lcd_dat li t0, 0x02 jal lcd_dat li t0, 0x06 jal lcd_dat li t0, 0x09 jal lcd_dat li t0, 0x08 jal lcd_dat li t0, 0x05 jal lcd_dat li t0, 0x29 jal lcd_dat li t0, 0x44 jal lcd_dat li t0, 0x42 jal lcd_dat li t0, 0x38 jal lcd_dat li t0, 0x14 jal lcd_dat li t0, 0x14 jal lcd_dat li t0, 0x2a jal lcd_dat li t0, 0x30 jal lcd_dat li t0, 0x36 jal lcd_cmd li t0, 0xb0 jal lcd_dat li t0, 0x2a jal lcd_cmd li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x01 jal lcd_dat li t0, 0x3f jal lcd_dat li t0, 0x2b jal lcd_cmd li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0xef jal lcd_dat li t0, 0x3a jal lcd_cmd li t0, 0x55 jal lcd_dat li t0, 0x29 jal lcd_cmd li t0, 0x2c jal lcd_cmd loop: li a0, GPIO_BASE + PE_DAT lw t0, 0(a0) li t1, (1 << 0) and t1, t1, t0 bgtz t1, 0f li t0, 30 j draw 0: li t1, (1 << 7) and t1, t1, t0 bgtz t1, 1f li t0, 31 j draw 1: li t1, (1 << 4) and t1, t1, t0 bgtz t1, 2f li t0, 16 j draw 2: li t1, (1 << 6) and t1, t1, t0 bgtz t1, 3f li t0, 17 j draw 3: li t1, (1 << 12) and t1, t1, t0 bgtz t1, 4f li t0, 'B' j draw 4: li t1, (1 << 11) and t1, t1, t0 bgtz t1, 5f li t0, 'X' j draw 5: li t1, (1 << 1) and t1, t1, t0 bgtz t1, 6f li t0, 'L' j draw 6: li t1, (1 << 10) and t1, t1, t0 bgtz t1, 7f li t0, 'R' j draw 7: li t1, (1 << 2) and t1, t1, t0 bgtz t1, 8f li t0, 'Y' j draw 8: li t1, (1 << 9) and t1, t1, t0 bgtz t1, 9f li t0, 'T' j draw 9: li t1, (1 << 8) and t1, t1, t0 bgtz t1, 10f li t0, 'S' j draw 10: li t1, (1 << 3) and t1, t1, t0 bgtz t1, 11f li t0, 'M' j draw 11: li t1, (1 << 13) and t1, t1, t0 bgtz t1, 12f li t0, 'A' j draw 12: li x8, 0 li x9, 0 jal set_pos li t6, 320 * 240 bg: li t0, BG jal lcd_dat addi t6, t6, -1 bgtz t6, bg li t0, _250MS jal delay j loop draw: sll t0, t0, 3 la a3, font add a3, a3, t0 li t6, 8 li x8, 135 li x9, 100 nbyte: li t5, 8 lb a4, 0(a3) jal set_pos byte: li t1, 0x80 and t0, a4, t1 sll a4, a4, 1 beqz t0, w0 w1: li t0, FG jal lcd_dat li t0, FG jal lcd_dat li t0, FG jal lcd_dat li t0, FG jal lcd_dat j next w0: li t0, BG jal lcd_dat li t0, BG jal lcd_dat li t0, BG jal lcd_dat li t0, BG jal lcd_dat next: addi t5, t5, -1 bgtz t5, byte add a3, a3, 1 add x9, x9, 2 addi t6, t6, -1 bgtz t6, nbyte j loop set_pos: move a2, ra li t0, 0x2a jal lcd_cmd li t0, 0 jal lcd_dat move t0, x8 jal lcd_dat li t0, 0x2b jal lcd_cmd li t0, 0 jal lcd_dat move t0, x9 jal lcd_dat li t0, 0x2c jal lcd_cmd jr a2 lcd_wr: li a0, GPIO_BASE + PD_DAT li t4, 0x00ff and t2, t0, t4 li t4, 0xff00 and t3, t0, t4 sll t2, t2, 1 sll t3, t3, 2 move t4, t1 or t4, t4, t2 or t4, t4, t3 sw t4, 0(a0) li t0, LCD_WR or t4, t4, t0 sw t4, 0(a0) jr ra lcd_dat: move a1, ra li t1, LCD_RS | LCD_RD | LCD_BL | LCD_RST jal lcd_wr jr a1 lcd_cmd: move a1, ra li t1, LCD_RD | LCD_BL | LCD_RST jal lcd_wr jr a1 lcd_rst: move a1, ra li t0, 0x00000000 li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) li t0, _250MS jal delay li t0, 0xffffffff li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) li t0, _250MS jal delay jr a1 delay: addi t0, t0, -1 bgtz t0, delay jr ra font: .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00 .byte 0x3C,0x42,0x99,0xBD,0xBD,0x99,0x42,0x3C,0x3C,0x42,0x81,0x81,0x81,0x81,0x42,0x3C .byte 0xFE,0x82,0x8A,0xD2,0xA2,0x82,0xFE,0x00,0xFE,0x82,0x82,0x82,0x82,0x82,0xFE,0x00 .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x38,0x64,0x74,0x7C,0x38,0x00,0x00 .byte 0x80,0xC0,0xF0,0xFC,0xF0,0xC0,0x80,0x00,0x01,0x03,0x0F,0x3F,0x0F,0x03,0x01,0x00 .byte 0x18,0x3C,0x7E,0x18,0x7E,0x3C,0x18,0x00,0xEE,0xEE,0xEE,0xCC,0x00,0xCC,0xCC,0x00 .byte 0x00,0x00,0x30,0x68,0x78,0x30,0x00,0x00,0x00,0x38,0x64,0x74,0x7C,0x38,0x00,0x00 .byte 0x3C,0x66,0x7A,0x7A,0x7E,0x7E,0x3C,0x00,0x0E,0x3E,0x3A,0x22,0x26,0x6E,0xE4,0x40 .byte 0x18,0x3C,0x7E,0x3C,0x3C,0x3C,0x3C,0x00,0x3C,0x3C,0x3C,0x3C,0x7E,0x3C,0x18,0x00 .byte 0x08,0x7C,0x7E,0x7E,0x7C,0x08,0x00,0x00,0x10,0x3E,0x7E,0x7E,0x3E,0x10,0x00,0x00 .byte 0x58,0x2A,0xDC,0xC8,0xDC,0x2A,0x58,0x00,0x24,0x66,0xFF,0xFF,0x66,0x24,0x00,0x00 .byte 0x00,0x10,0x10,0x38,0x38,0x7C,0xFE,0x00,0xFE,0x7C,0x38,0x38,0x10,0x10,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x1C,0x1C,0x1C,0x18,0x00,0x18,0x18,0x00 .byte 0x6C,0x6C,0x24,0x00,0x00,0x00,0x00,0x00,0x00,0x28,0x7C,0x28,0x7C,0x28,0x00,0x00 .byte 0x10,0x38,0x60,0x38,0x0C,0x78,0x10,0x00,0x40,0xA4,0x48,0x10,0x24,0x4A,0x04,0x00 .byte 0x18,0x34,0x18,0x3A,0x6C,0x66,0x3A,0x00,0x18,0x18,0x20,0x00,0x00,0x00,0x00,0x00 .byte 0x30,0x60,0x60,0x60,0x60,0x60,0x30,0x00,0x0C,0x06,0x06,0x06,0x06,0x06,0x0C,0x00 .byte 0x10,0x54,0x38,0x7C,0x38,0x54,0x10,0x00,0x00,0x18,0x18,0x7E,0x18,0x18,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x18,0x18,0x30,0x00,0x00,0x00,0x00,0x00,0x3E,0x00,0x00,0x00 .byte 0x00,0x00,0x00,0x00,0x18,0x18,0x00,0x00,0x00,0x04,0x08,0x10,0x20,0x40,0x00,0x00 .byte 0x38,0x4C,0xC6,0xC6,0xC6,0x64,0x38,0x00,0x18,0x38,0x18,0x18,0x18,0x18,0x7E,0x00 .byte 0x7C,0xC6,0x0E,0x3C,0x78,0xE0,0xFE,0x00,0x7E,0x0C,0x18,0x3C,0x06,0xC6,0x7C,0x00 .byte 0x1C,0x3C,0x6C,0xCC,0xFE,0x0C,0x0C,0x00,0xFC,0xC0,0xFC,0x06,0x06,0xC6,0x7C,0x00 .byte 0x3C,0x60,0xC0,0xFC,0xC6,0xC6,0x7C,0x00,0xFE,0xC6,0x0C,0x18,0x30,0x30,0x30,0x00 .byte 0x78,0xC4,0xE4,0x78,0x86,0x86,0x7C,0x00,0x7C,0xC6,0xC6,0x7E,0x06,0x0C,0x78,0x00 .byte 0x00,0x00,0x18,0x00,0x00,0x18,0x00,0x00,0x00,0x00,0x18,0x00,0x00,0x18,0x18,0x30 .byte 0x1C,0x38,0x70,0xE0,0x70,0x38,0x1C,0x00,0x00,0x7C,0x00,0x00,0x7C,0x00,0x00,0x00 .byte 0x70,0x38,0x1C,0x0E,0x1C,0x38,0x70,0x00,0x7C,0xC6,0xC6,0x1C,0x18,0x00,0x18,0x00 .byte 0x3C,0x42,0x99,0xA1,0xA5,0x99,0x42,0x3C,0x38,0x6C,0xC6,0xC6,0xFE,0xC6,0xC6,0x00 .byte 0xFC,0xC6,0xC6,0xFC,0xC6,0xC6,0xFC,0x00,0x3C,0x66,0xC0,0xC0,0xC0,0x66,0x3C,0x00 .byte 0xF8,0xCC,0xC6,0xC6,0xC6,0xCC,0xF8,0x00,0xFE,0xC0,0xC0,0xFC,0xC0,0xC0,0xFE,0x00 .byte 0xFE,0xC0,0xC0,0xFC,0xC0,0xC0,0xC0,0x00,0x3E,0x60,0xC0,0xCE,0xC6,0x66,0x3E,0x00 .byte 0xC6,0xC6,0xC6,0xFE,0xC6,0xC6,0xC6,0x00,0x7E,0x18,0x18,0x18,0x18,0x18,0x7E,0x00 .byte 0x06,0x06,0x06,0x06,0xC6,0xC6,0x7C,0x00,0xC6,0xCC,0xD8,0xF0,0xF8,0xDC,0xCE,0x00 .byte 0x60,0x60,0x60,0x60,0x60,0x60,0x7E,0x00,0xC6,0xEE,0xFE,0xFE,0xD6,0xC6,0xC6,0x00 .byte 0xC6,0xE6,0xF6,0xFE,0xDE,0xCE,0xC6,0x00,0x7C,0xC6,0xC6,0xC6,0xC6,0xC6,0x7C,0x00 .byte 0xFC,0xC6,0xC6,0xC6,0xFC,0xC0,0xC0,0x00,0x7C,0xC6,0xC6,0xC6,0xDE,0xCC,0x7A,0x00 .byte 0xFC,0xC6,0xC6,0xCE,0xF8,0xDC,0xCE,0x00,0x78,0xCC,0xC0,0x7C,0x06,0xC6,0x7C,0x00 .byte 0x7E,0x18,0x18,0x18,0x18,0x18,0x18,0x00,0xC6,0xC6,0xC6,0xC6,0xC6,0xC6,0x7C,0x00 .byte 0xC6,0xC6,0xC6,0xEE,0x7C,0x38,0x10,0x00,0xC6,0xC6,0xD6,0xFE,0xFE,0xEE,0xC6,0x00 .byte 0xC6,0xEE,0x3C,0x38,0x7C,0xEE,0xC6,0x00,0x66,0x66,0x66,0x3C,0x18,0x18,0x18,0x00 .byte 0xFE,0x0E,0x1C,0x38,0x70,0xE0,0xFE,0x00,0x3C,0x30,0x30,0x30,0x30,0x30,0x3C,0x00 .byte 0x60,0x60,0x30,0x18,0x0C,0x06,0x06,0x00,0x3C,0x0C,0x0C,0x0C,0x0C,0x0C,0x3C,0x00 .byte 0x18,0x3C,0x66,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF .byte 0x30,0x30,0x18,0x00,0x00,0x00,0x00,0x00,0x00,0x3C,0x06,0x3E,0x66,0x66,0x3C,0x00 .byte 0x60,0x7C,0x66,0x66,0x66,0x66,0x7C,0x00,0x00,0x3C,0x66,0x60,0x60,0x66,0x3C,0x00 .byte 0x06,0x3E,0x66,0x66,0x66,0x66,0x3E,0x00,0x00,0x3C,0x66,0x66,0x7E,0x60,0x3C,0x00 .byte 0x1C,0x30,0x78,0x30,0x30,0x30,0x30,0x00,0x00,0x3E,0x66,0x66,0x66,0x3E,0x06,0x3C .byte 0x60,0x7C,0x76,0x66,0x66,0x66,0x66,0x00,0x18,0x00,0x38,0x18,0x18,0x18,0x18,0x00 .byte 0x0C,0x00,0x1C,0x0C,0x0C,0x0C,0x0C,0x38,0x60,0x60,0x66,0x6C,0x78,0x6C,0x66,0x00 .byte 0x38,0x18,0x18,0x18,0x18,0x18,0x18,0x00,0x00,0xEC,0xFE,0xFE,0xFE,0xD6,0xC6,0x00 .byte 0x00,0x7C,0x76,0x66,0x66,0x66,0x66,0x00,0x00,0x3C,0x66,0x66,0x66,0x66,0x3C,0x00 .byte 0x00,0x7C,0x66,0x66,0x66,0x7C,0x60,0x60,0x00,0x3E,0x66,0x66,0x66,0x3E,0x06,0x06 .byte 0x00,0x7E,0x70,0x60,0x60,0x60,0x60,0x00,0x00,0x3C,0x60,0x3C,0x06,0x66,0x3C,0x00 .byte 0x30,0x78,0x30,0x30,0x30,0x30,0x1C,0x00,0x00,0x66,0x66,0x66,0x66,0x6E,0x3E,0x00 .byte 0x00,0x66,0x66,0x66,0x66,0x3C,0x18,0x00,0x00,0xC6,0xD6,0xFE,0xFE,0x7C,0x6C,0x00 .byte 0x00,0x66,0x3C,0x18,0x3C,0x66,0x66,0x00,0x00,0x66,0x66,0x66,0x66,0x3E,0x06,0x3C .byte 0x00,0x7E,0x0C,0x18,0x30,0x60,0x7E,0x00,0x0E,0x18,0x0C,0x38,0x0C,0x18,0x0E,0x00 .byte 0x18,0x18,0x18,0x00,0x18,0x18,0x18,0x00,0x70,0x18,0x30,0x1C,0x30,0x18,0x70,0x00 .byte 0x00,0x00,0x76,0xDC,0x00,0x00,0x00,0x00,0x10,0x28,0x10,0x54,0xAA,0x44,0x00,0x00 .end
完成


-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@hsinyuwang
你這個 GIF 圖片是相當好的展示
如果沒有 TE 腳位, 但要解決閃屏, 難度比較高一點, 不過還是有機會, 只是需要依靠觀察做微調, 幾個建議提供給你參考:
- 屏的初始化步驟到第一筆送出的像素必須固定住時間
- 傳送像素完成後, 中斷的處理必須固定住時間
- 利用 0x2c Command 去抓延遲間隔(每個 Frame 的間隔)
依據這樣微調, 你有機會可以解決閃屏, 但是, 你如果是跑 Linux 系統, 難度就很高, 因為你應該是會被 Context Switch, 時間固定不住, RTOS 就有機會, 然後, MCU 在每片屏上的時間差異, 還需要考慮~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
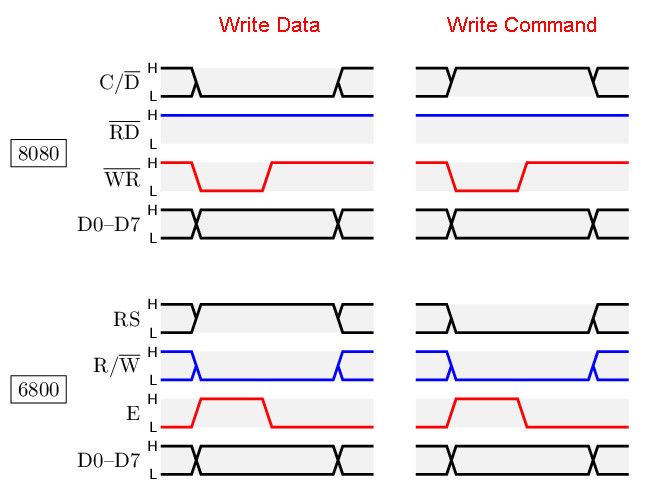
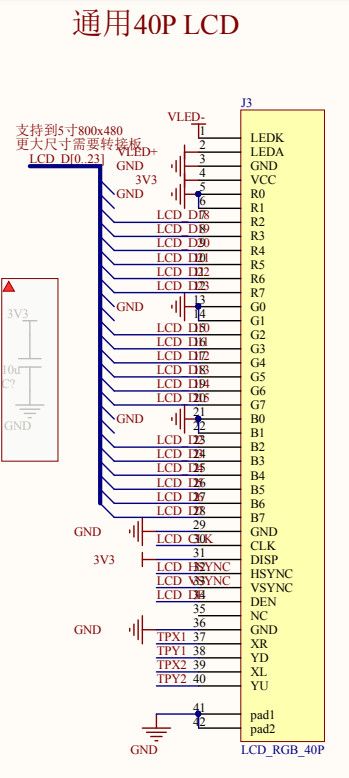
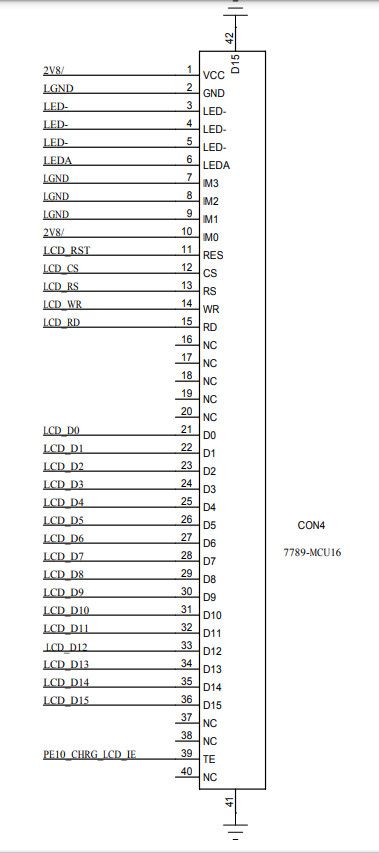
司徒接下來介紹點屏的步驟,而在點屏之前,我們需要先了解一下屏的一些特性,這樣才可以跑順後面的開發,一般常說的 8080 屏、i80 屏、MCU 屏,指的就是傳輸資料的方式是使用 Intel 8080 的讀寫方式,其實早期是有兩大派別,分別是 Intel 8080 和 Motorola 6800,至於為何後來都用 Intel 8080,這應該不用多說,8080 和 6800 的格式可以從下圖知曉
那為何 i80 屏需要做初始化呢 ?因為裡面有專門用來做顯示處理的 MCU,因此,需要設定一些參數,如:width=320, height=240, fps=60 等參數,所以傳送給屏的資料會分成 Data 和 Command,當然,有些特殊制定規格的屏就不須要初始化,因為參數都已經寫死並且固定在 MCU 裡,不過,市面上比較難購買到這類產品
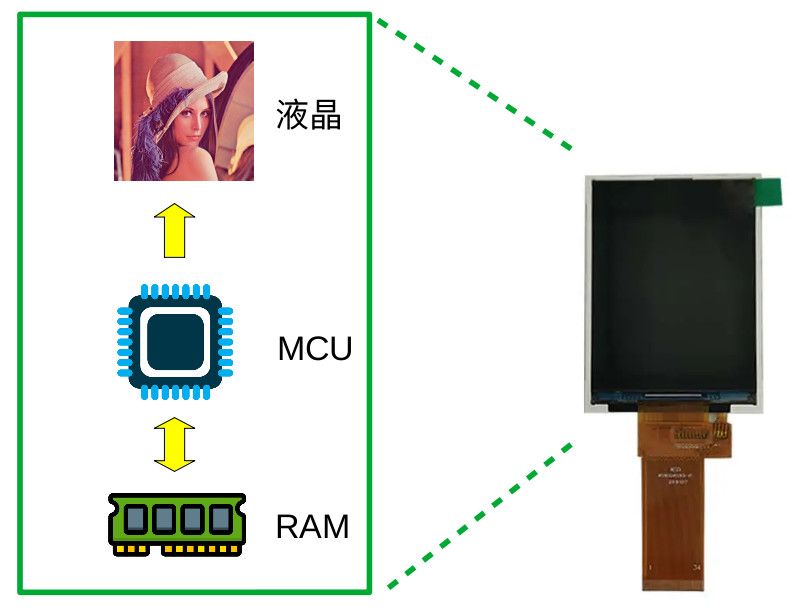
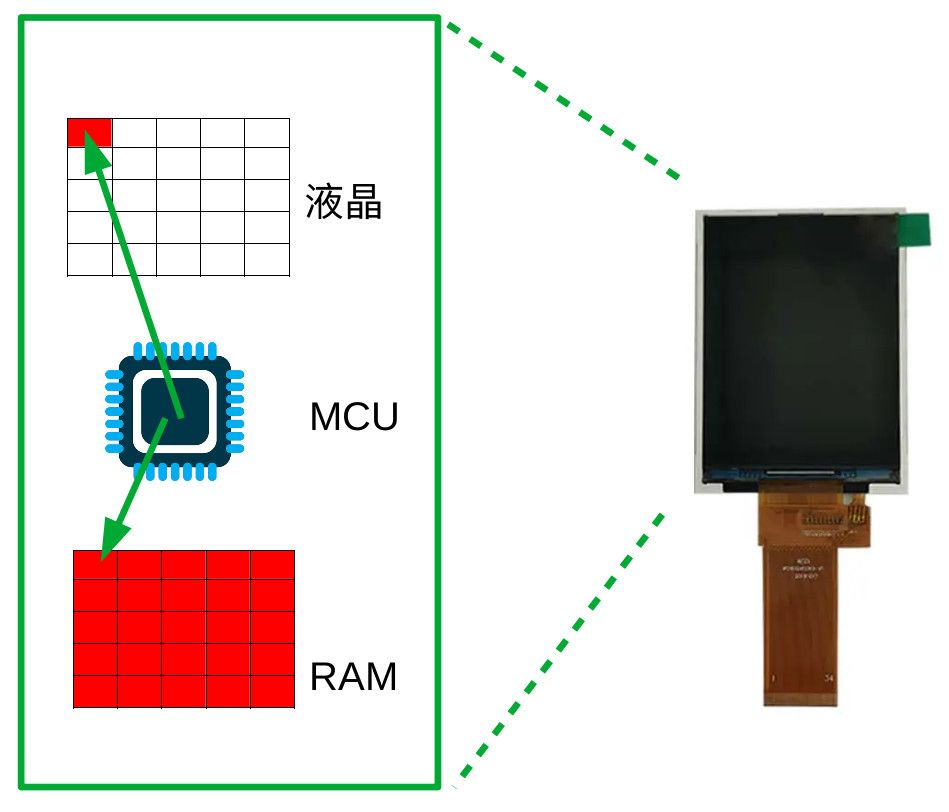
MCU 在顯示圖像時,會固定從 RAM(或稱呼:顯示記憶體、Graphic RAM、GRAM)讀取資料並顯示在屏上面
那該如何初始化呢?目前市面上的屏大約可以分成兩種作法:1. 使用 DB0~DB15 傳送初始化 Data 和 Command, 2. 使用 I2C 傳送 Data 和 Command
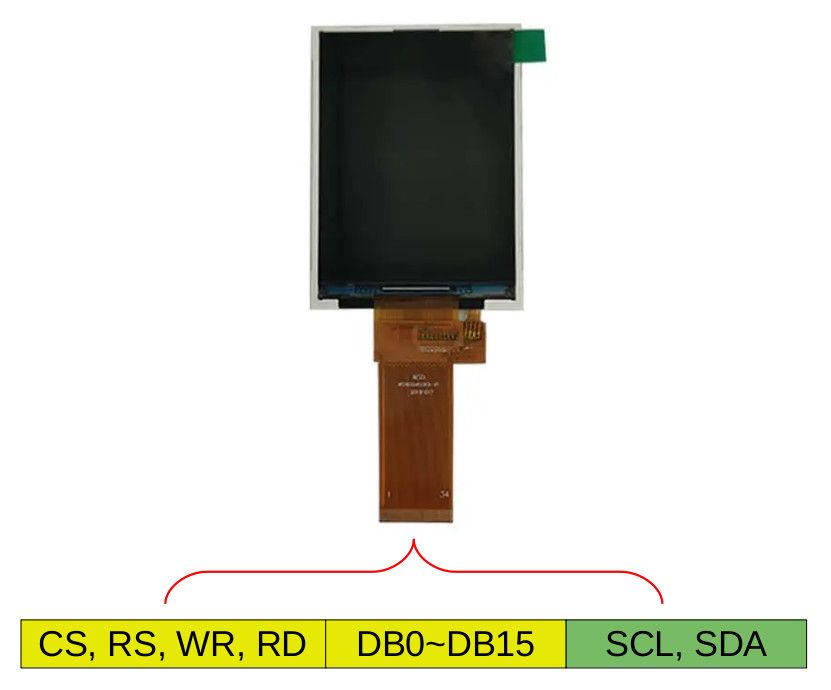
兩種方式都可以達到初始化的目的,因此,在購買 i80 屏後,記得跟賣家索取初始化命令
那問題來了,當我們正在刷屏(寫入 RAM)時,MCU 是否有可能正在讀取 RAM ?答案:沒錯,這種狀況一定會發生,假如寫入跟讀取沒有一個同步機制,那就會發生這種狀況,而這種狀況就是一般俗稱:撕裂、閃屏、Screen Tearing,司徒畫了一張流程圖,下圖是 MCU 讀取 RAM 並且顯示在屏上的流程
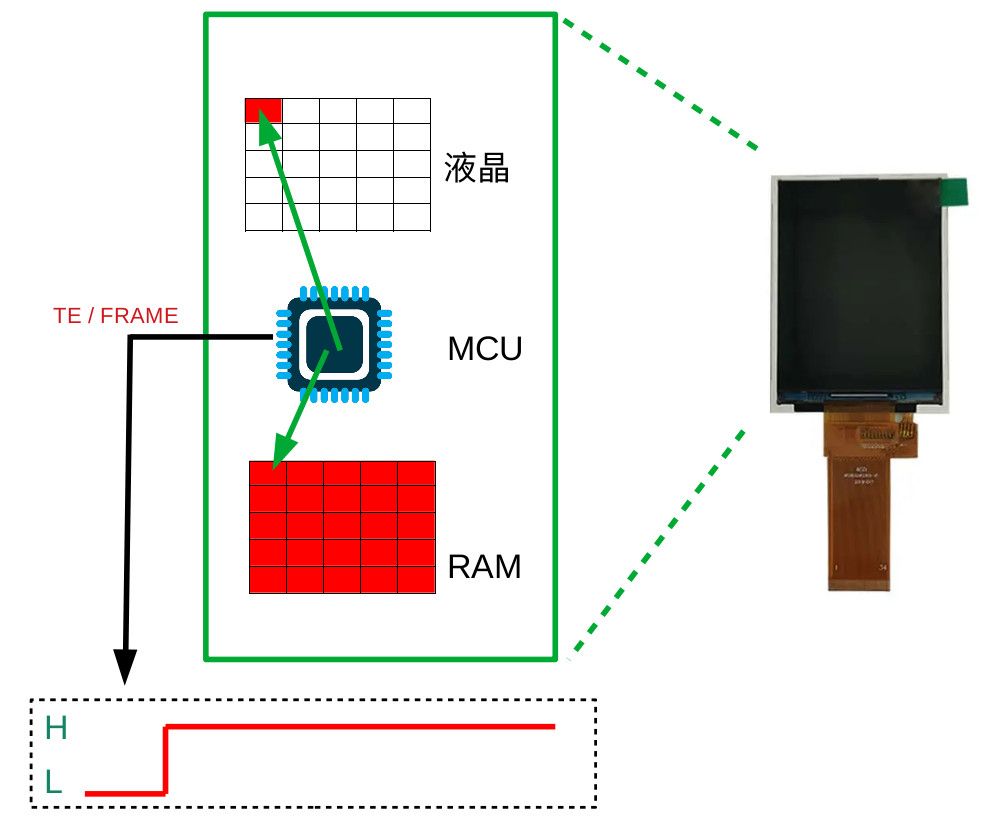
當 F133 透過 TCON_LCD i80 介面傳送資料給屏時(黃色的像素),由於共用同一塊 RAM,因此,RAM 的內容被更新成黃色,同時,屏的 MCU 也正在更新圖像到屏上,因此,變成第一個畫面(紅色)和第二個畫面(黃色)的交疊狀況,如下圖

那 i80 屏的撕裂問題如何解決呢?其實,一般 i80 屏都會拉出 TE/FRAME 腳位,這個腳位一般不使用,因為它跟時序高度相關,需要同步處理,同常 TE/FRAME 腳位都會懸空,不過,TE/FRAME 腳位其實是用來告知屏的 MCU 是否正在更新圖像(讀取 RAM),因此,為了避免撕裂,F133 TCON_LCD 可以在 MCU 空閒時,傳送更新的資料,這樣就可以避免撕裂
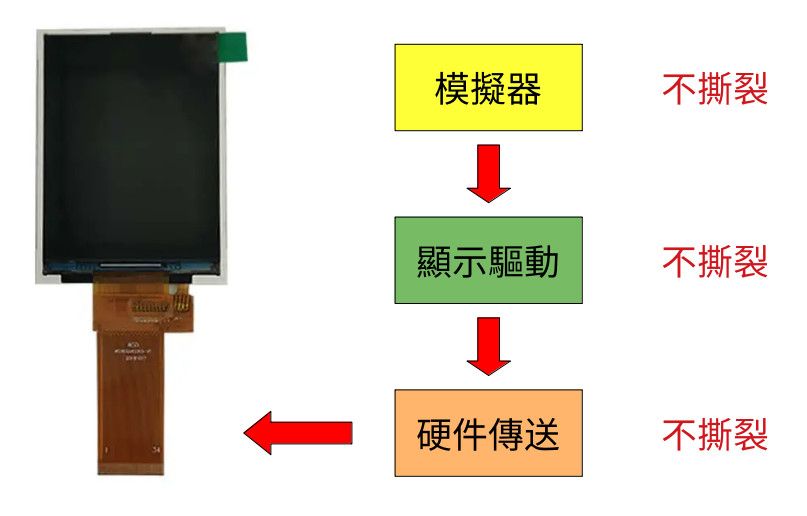
那是不是搞定 TE/FRAME 腳位後,屏就不會撕裂?答案:不是,因為,從模擬器、顯示驅動到硬件傳送都可能會有撕裂問題,所以要確保顯示品質,任何經過的地方都必須仔細處理才可以保證畫面不撕裂
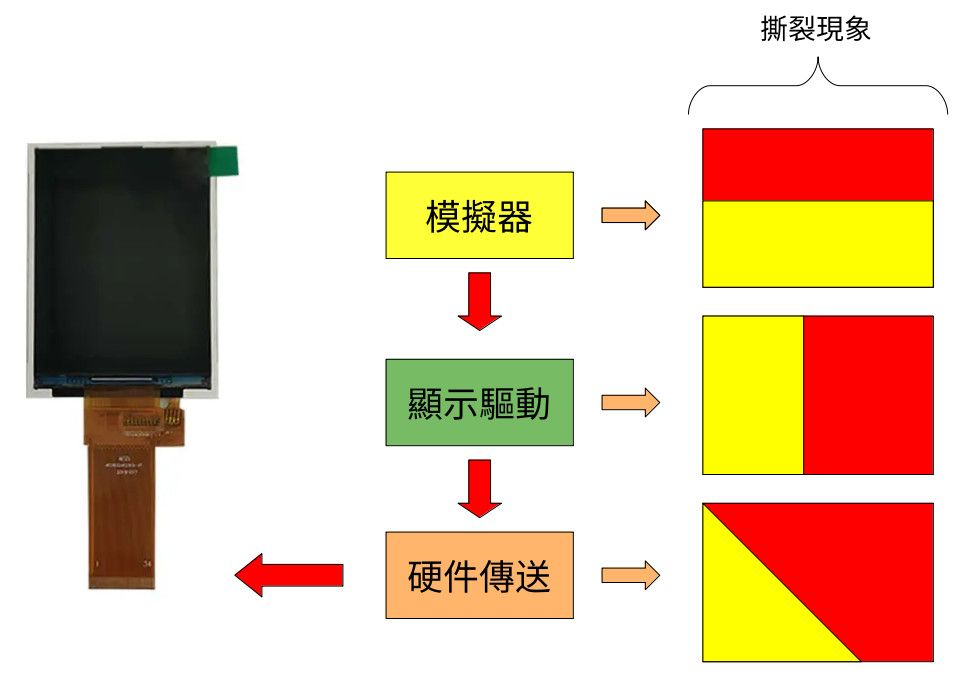
根據司徒的經驗,在不同地方的所造成的撕裂,將會有不一樣的結果,下圖是司徒整理的有趣現象,模擬器因為是像素更新居多,因此,覆蓋一般是從起始像素開始,所以撕裂比較像是上下分層,而顯示驅動一般使用區塊複製,因此,撕裂是屬於左右分層,屏的撕裂,由於更新跟寫入是屬於追跑的現象,因此,撕裂屬於三角分層
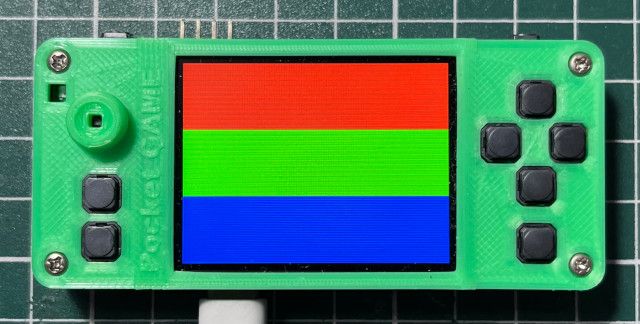
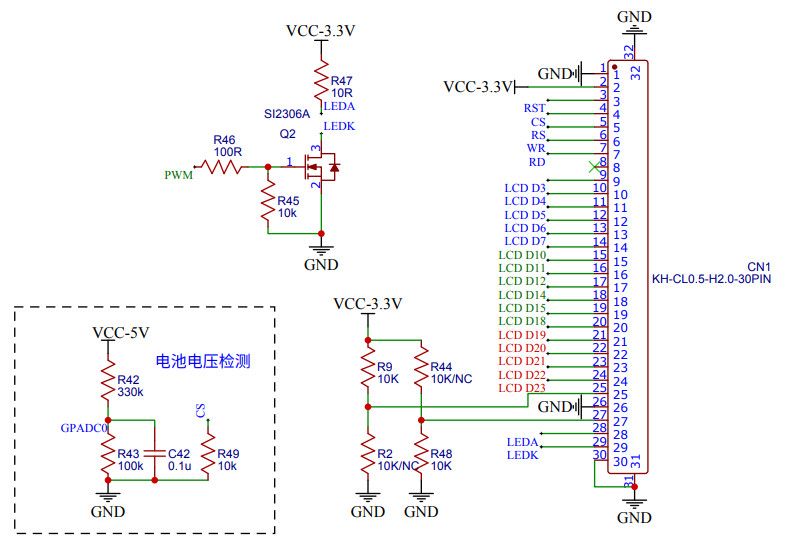
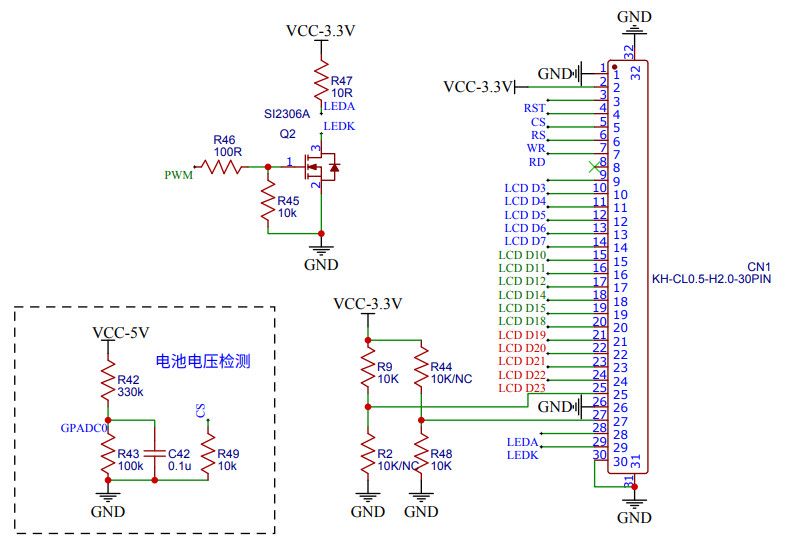
LCD 電路
main.s.global _start .equ GPIO_BASE, 0x02000000 .equ PD_CFG0, 0x0090 .equ PD_CFG1, 0x0094 .equ PD_CFG2, 0x0098 .equ PD_DAT, 0x00a0 .equ LCD_RST, (1 << 0) .equ LCD_WR, (1 << 18) .equ LCD_RS, (1 << 19) .equ LCD_RD, (1 << 20) .equ LCD_CS, (1 << 21) .equ LCD_BL, (1 << 22) .equ _250MS, 50000000 .equ _500MS, 100000000 .equ _1S, 200000000 .text .long 0x4000006f .byte 'e','G','O','N','.','B','T','0' .long 0x5F0A6C39 .long 0x8000 .long 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .org 0x0400 _start: li t0, 0x11111111 li a0, GPIO_BASE + PD_CFG0 sw t0, 0(a0) li a0, GPIO_BASE + PD_CFG1 sw t0, 0(a0) li a0, GPIO_BASE + PD_CFG2 sw t0, 0(a0) li t0, 0xffffffff li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) jal lcd_rst li t0, 0xb2 jal lcd_cmd li t0, 0x5c jal lcd_dat li t0, 0x5c jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0xb7 jal lcd_cmd li t0, 0x35 jal lcd_dat li t0, 0x21 jal lcd_cmd li t0, 0x11 jal lcd_cmd li t0, _250MS jal delay li t0, 0xe0 jal lcd_cmd li t0, 0xd0 jal lcd_dat li t0, 0x06 jal lcd_dat li t0, 0x0b jal lcd_dat li t0, 0x07 jal lcd_dat li t0, 0x07 jal lcd_dat li t0, 0x24 jal lcd_dat li t0, 0x2e jal lcd_dat li t0, 0x32 jal lcd_dat li t0, 0x46 jal lcd_dat li t0, 0x37 jal lcd_dat li t0, 0x13 jal lcd_dat li t0, 0x13 jal lcd_dat li t0, 0x2d jal lcd_dat li t0, 0x33 jal lcd_dat li t0, 0xe1 jal lcd_cmd li t0, 0xd0 jal lcd_dat li t0, 0x02 jal lcd_dat li t0, 0x06 jal lcd_dat li t0, 0x09 jal lcd_dat li t0, 0x08 jal lcd_dat li t0, 0x05 jal lcd_dat li t0, 0x29 jal lcd_dat li t0, 0x44 jal lcd_dat li t0, 0x42 jal lcd_dat li t0, 0x38 jal lcd_dat li t0, 0x14 jal lcd_dat li t0, 0x14 jal lcd_dat li t0, 0x2a jal lcd_dat li t0, 0x30 jal lcd_dat li t0, 0x36 jal lcd_cmd li t0, 0xb0 jal lcd_dat li t0, 0x2a jal lcd_cmd li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x01 jal lcd_dat li t0, 0x3f jal lcd_dat li t0, 0x2b jal lcd_cmd li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0x00 jal lcd_dat li t0, 0xef jal lcd_dat li t0, 0x3a jal lcd_cmd li t0, 0x55 jal lcd_dat li t0, 0x29 jal lcd_cmd li t0, 0x2c jal lcd_cmd li t6, 320 * 80 red: li t0, 0xf800 jal lcd_dat addi t6, t6, -1 bgtz t6, red li t6, 320 * 80 green: li t0, 0x7e0 jal lcd_dat addi t6, t6, -1 bgtz t6, green li t6, 320 * 80 blue: li t0, 0x1f jal lcd_dat addi t6, t6, -1 bgtz t6, blue 1: j 1b lcd_wr: li a0, GPIO_BASE + PD_DAT li t4, 0x00ff and t2, t0, t4 li t4, 0xff00 and t3, t0, t4 sll t2, t2, 1 sll t3, t3, 2 move t5, t1 or t5, t5, t2 or t5, t5, t3 sw t5, 0(a0) li t0, LCD_WR or t5, t5, t0 sw t5, 0(a0) jr ra lcd_dat: move a1, ra li t1, LCD_RS | LCD_RD | LCD_BL | LCD_RST jal lcd_wr jr a1 lcd_cmd: move a1, ra li t1, LCD_RD | LCD_BL | LCD_RST jal lcd_wr jr a1 lcd_rst: move a1, ra li t0, 0x00000000 li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) li t0, _250MS jal delay li t0, 0xffffffff li a0, GPIO_BASE + PD_DAT sw t0, 0(a0) li t0, _250MS jal delay jr a1 delay: addi t0, t0, -1 bgtz t0, delay jr ra .end
完成

-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@lovehex99
一般建議先去搞系統再去做移植, 感觸會比較深, 提供一些想法給你:- 將 FunKeys rootfs 替換到 i.MX6 上面 (解開覆蓋掉原本的)
- 應該可以從 UART (serial port) 看到一些東西
- 開始看看系統裡面有什麼東西, 破壞它
- 如果 i.MX6 有 Framebuffer Driver, 你應該就可以看到顯示的畫面
做完上面的, 你這時候再去做移植或者重新編譯 OS, 將會有很深的體驗~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@lovehex99
請問是移植 FunKeys 系統嗎?目前我們的重心都是放在驗證硬件的工作上, 而移植模擬器、系統是屬於比較後期的工作, 所以目前我們無法確定會移植哪些東西, 目前能確定的是 GNGEO 模擬器一定會移植, 因為那是目前用來驗證逆向工程的模擬器~@aldfaaa
這板塊竟然還有 QQ 群, 厲害了~
司徒最近剛從撕逼群退出, 已經具備神龍護體、金剛不死之身, 你可以貼出 QQ群號, 讓我加入~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@hsinyuwang
RetroArch 本身支援 MIPS32, 因此, 有蠻大的機會可以移植給 RISC-V 使用, 只是目前移植 RetroArch 不在我們的計畫中, 之後如果有時間, 或許可以評估看看, 感謝你的建議~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
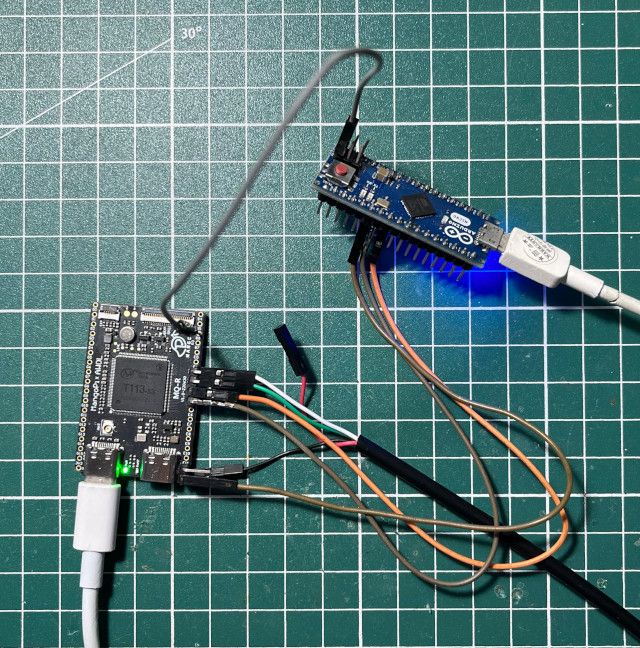
UART 是嵌入式開發最常用來除錯的一個介面, 因此, 在開始移植 Boot Loader 或者 Linux Kernel 之前, 必須先確保 UART 可以正常工作, 接下來, 司徒將說明如何驗證 UART 的輸出功能, 目前司徒是直接在 PCB 上面焊上排針
接線方式

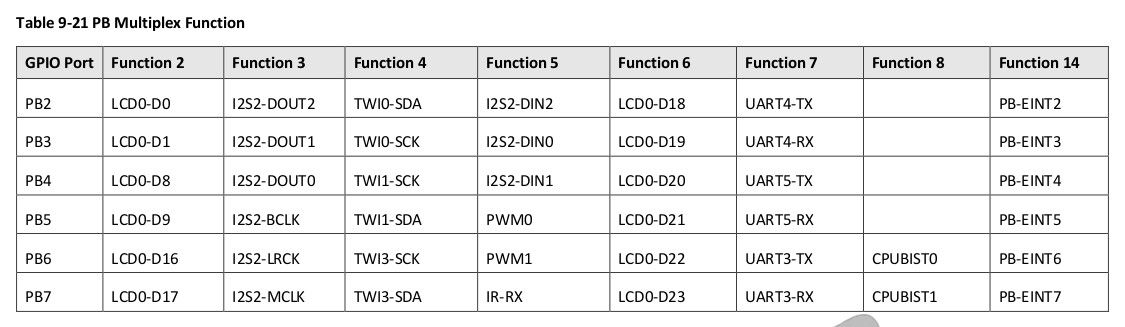
UART 連接到 PB2, PB3
PB2, PB3
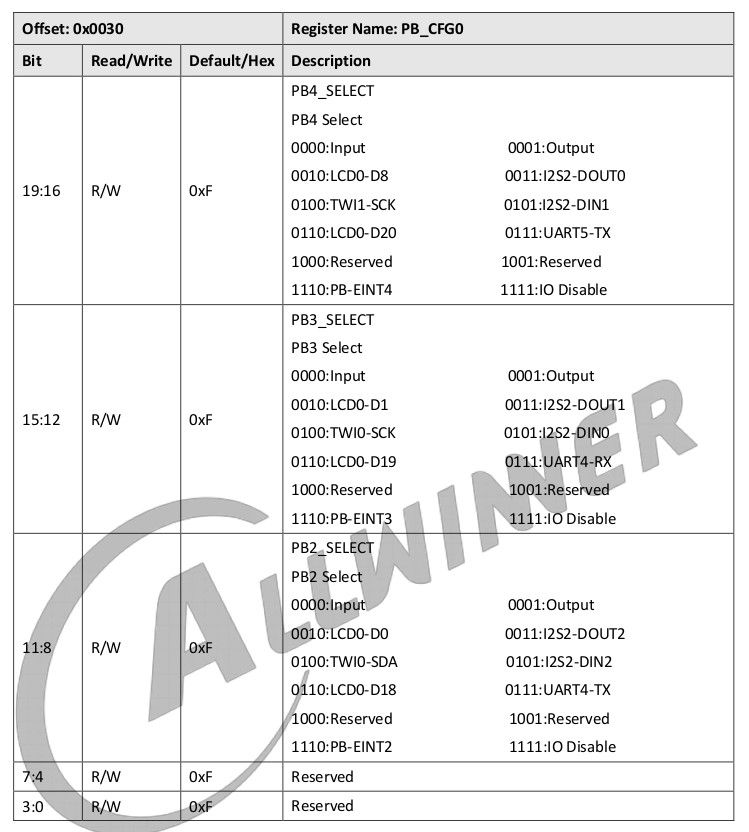
GPIO Multiplex Function
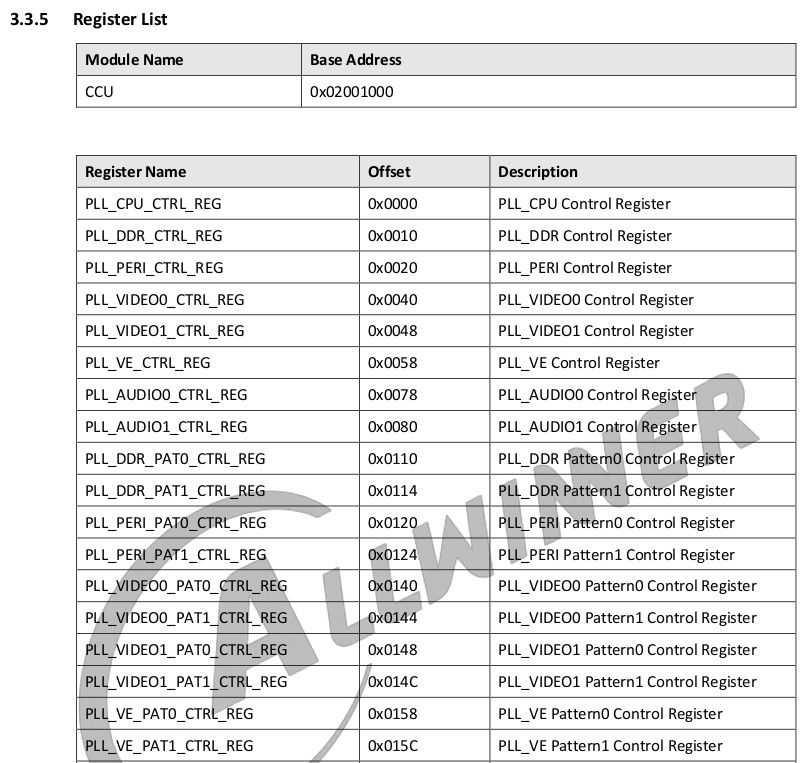
CCU 位址
APB1 (HOSC 24MHz)
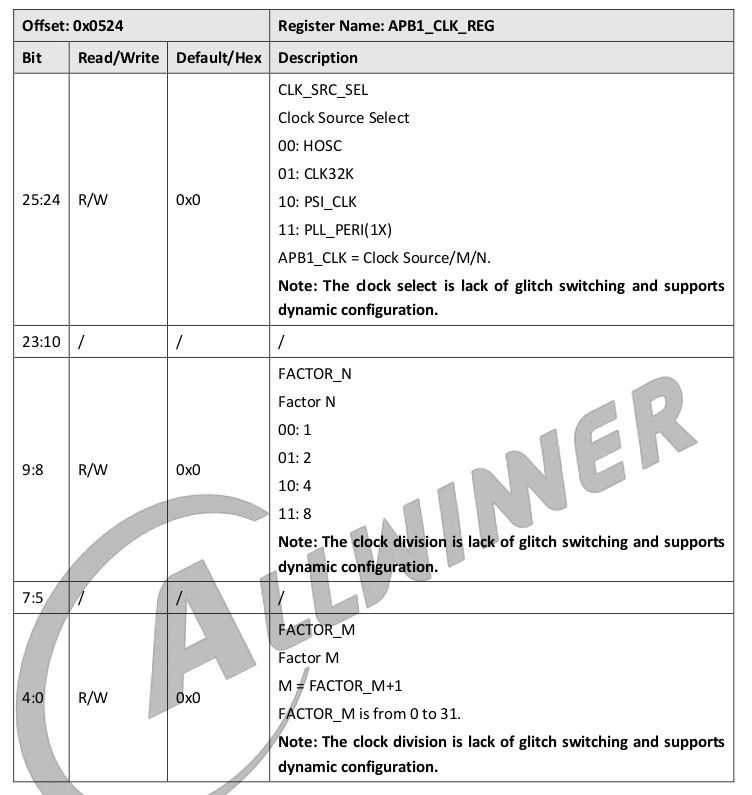
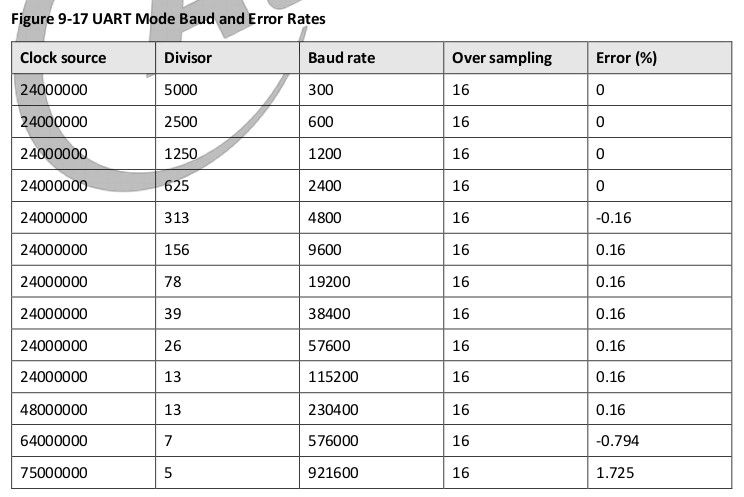
Baudrate Table (24MHz)
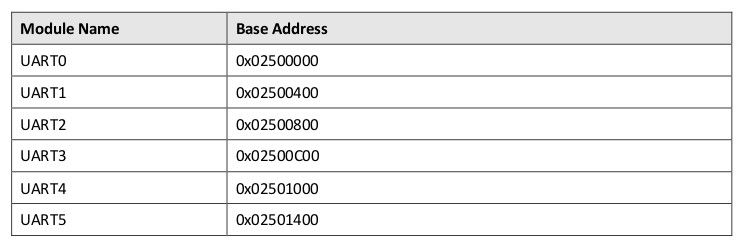
UART4 位址
UART 暫存器
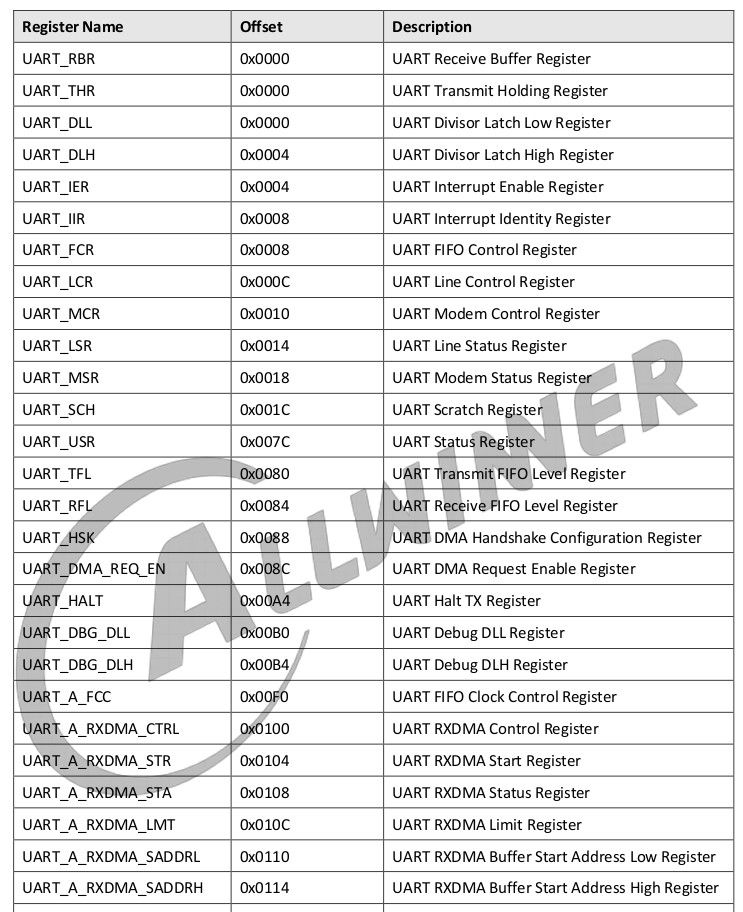
main.s.global _start .equ CCU_BASE, 0x02001000 .equ GPIO_BASE, 0x02000000 .equ UART4_BASE, 0x02501000 .equ PB_CFG0, 0x0030 .equ UART_BGR_REG, 0x090c .equ RBR, 0x0000 .equ THR, 0x0000 .equ DLL, 0x0000 .equ DLH, 0x0004 .equ IER, 0x0004 .equ IIR, 0x0008 .equ LCR, 0x000c .equ MCR, 0x0010 .equ LSR, 0x0014 .equ USR, 0x007c .text .long 0x4000006f .byte 'e','G','O','N','.','B','T','0' .long 0x5F0A6C39 .long 0x8000 .long 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .org 0x0400 _start: li t0, 0x7700 li a0, GPIO_BASE + PB_CFG0 sw t0, 0(a0) li t0, (1 << 20) | (1 << 4) li a0, CCU_BASE + UART_BGR_REG sw t0, 0(a0) li t0, 0 li a0, UART4_BASE + IER sw t0, 0(a0) li t0, 0 li a0, UART4_BASE + MCR sw t0, 0(a0) li a0, UART4_BASE + LCR lw t0, 0(a0) li t1, (1 << 7) or t0, t0, t1 sw t0, 0(a0) li t0, 13 li a0, UART4_BASE + DLL sw t0, 0(a0) li t0, 0 li a0, UART4_BASE + DLH sw t0, 0(a0) li a0, UART4_BASE + LCR lw t0, 0(a0) li t1, ~(1 << 7) and t0, t0, t1 sw t0, 0(a0) lw t0, 0(a0) li t1, ~(0x1f) and t0, t0, t1 li t1, 0x03 or t0, t0, t1 sw t0, 0(a0) la a1, hello 0: li a0, UART4_BASE + LSR lw t0, 0(a0) li t1, (1 << 5) and t0, t0, t1 beqz t0, 0b li t0, 0 lb t0, 0(a1) li a0, UART4_BASE + THR sb t0, 0(a0) add a1, a1, 1 bgtz t0, 0b 1: j 1b .align hello: .asciz "Hello, world!" .end
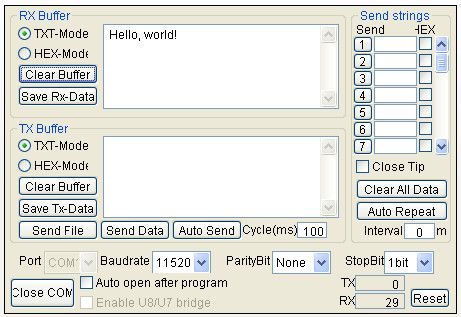
完成
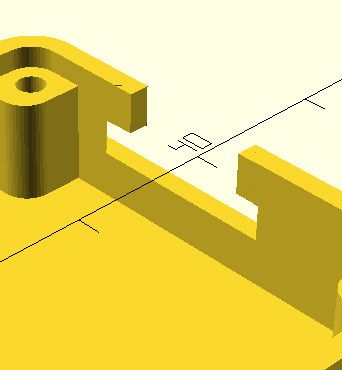
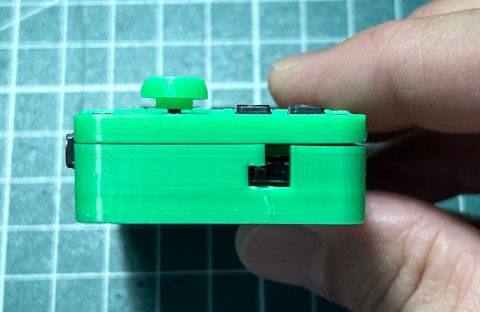
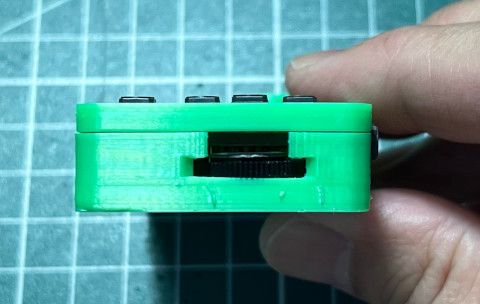
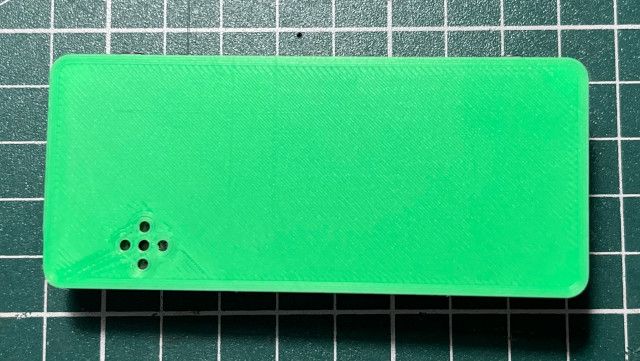
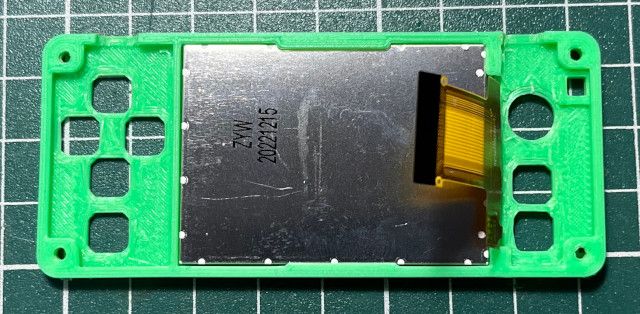
不過, 目前小志掌機的外殼缺少 UART 洞口, 因此, 司徒基於暈哥的外殼, 使用 OpenSCAD 改造一下
difference(){ import("V20-bottom.stl"); translate([-23, 10, -5]){ cube([10, 10, 10]); } } translate([42.1, -4.5, -3]){ cube([1.5, 3, 3]); } translate([42.1, 8.1, -3]){ cube([1.5, 3, 3]); }
UART位置
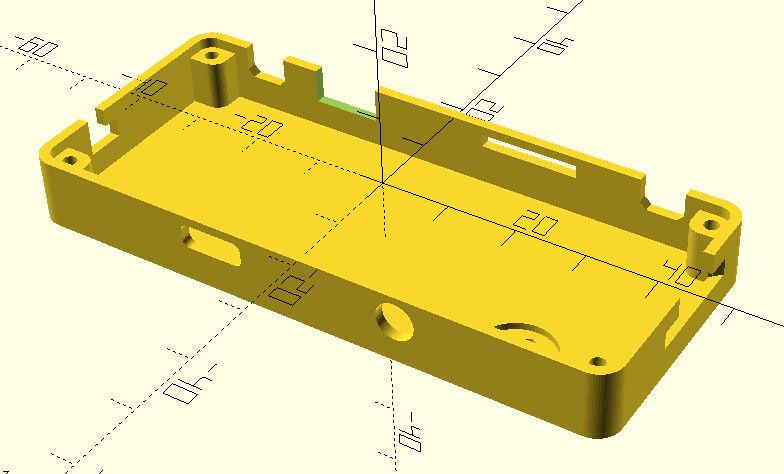
因為司徒的3D印表機精度不夠,只好補強音量鍵
3D印表機列印
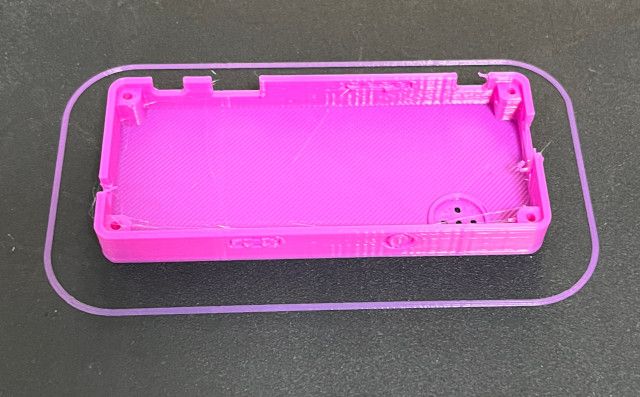
還不錯
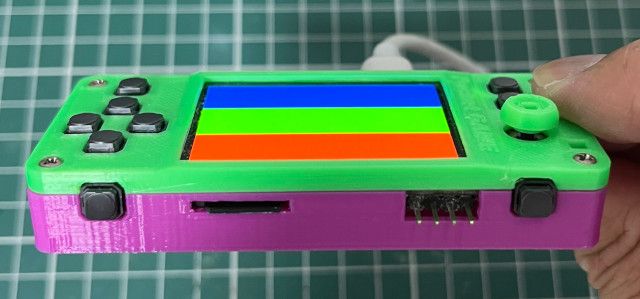
下邊

側邊
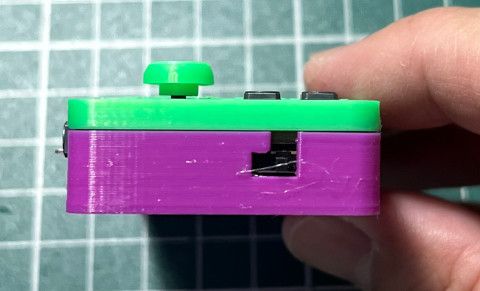
上邊
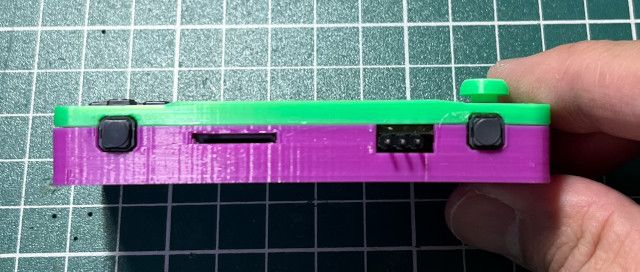
側邊
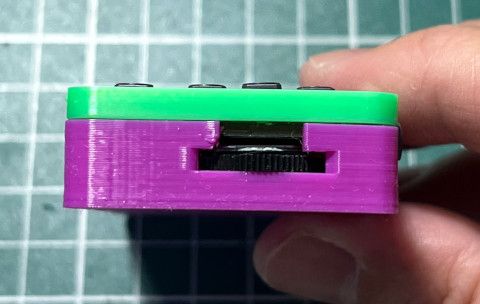
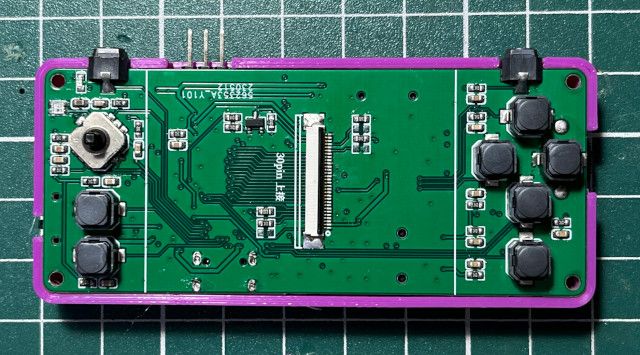
背面

-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
拿到打樣後的 PCB, 緊接著就需要進行驗證的動作, 一般在這個環節會有簡單的量產測試工具, 用來快速驗證某些模塊的功能是否正常, 這就是司徒接下來要介紹的東西, 如何寫出簡單的測試程序並下載到小志掌機做測試~
由於需要用到平頭哥的編譯器 (司徒一開始以為平頭哥是一個人...), 因此, 需要手動下載安裝$ cd $ wget https://github.com/steward-fu/archives/releases/download/f133/Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.1-20220906.tar.gz $ tar xvf Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.1-20220906.tar.gz $ sudo mv Xuantie-900-gcc-linux-5.10.4-glibc-x86_64-V2.6.1 /opt/f133 $ export PATH=/opt/f133/bin:$PATH $ riscv64-unknown-linux-gnu-gcc --version riscv64-unknown-linux-gnu-gcc (Xuantie-900 linux-5.10.4 glibc gcc Toolchain V2.6.1 B-20220906) 10.2.0 Copyright (C) 2020 Free Software Foundation, Inc. This is free software; see the source for copying conditions. There is NO warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
這階段的測試驗證將會使用 xfel 工具, 安裝方式如下$ cd $ git clone https://github.com/xboot/xfel $ cd xfel $ make $ sudo make install $ xfel --help xfel(v1.3.1) - https://github.com/xboot/xfel
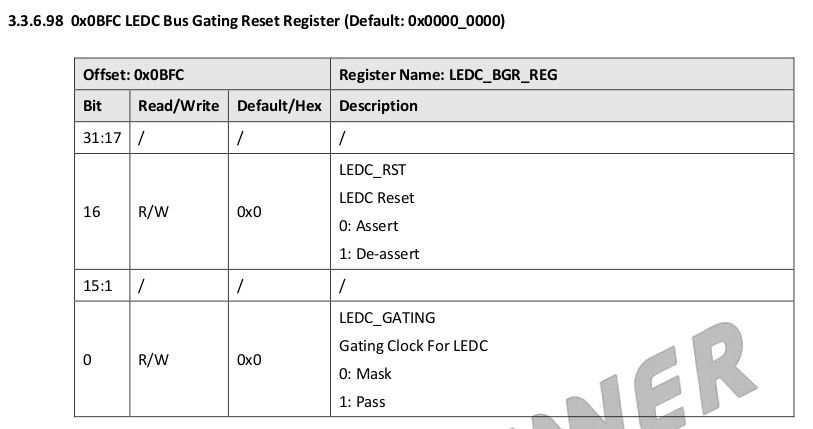
接下來, 司徒將會說明如何驗證 LED 部份, 確定你拿到的 PCB 是可以正常工作的, PE5 用來控制 LED,不過這顆 LED 是 WS2812C,它需要透過串列訊號控制, F133 本身就支援 LEDC 控制, 因此, 司徒將介紹如何透過 LEDC 點亮 LED
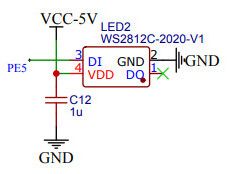
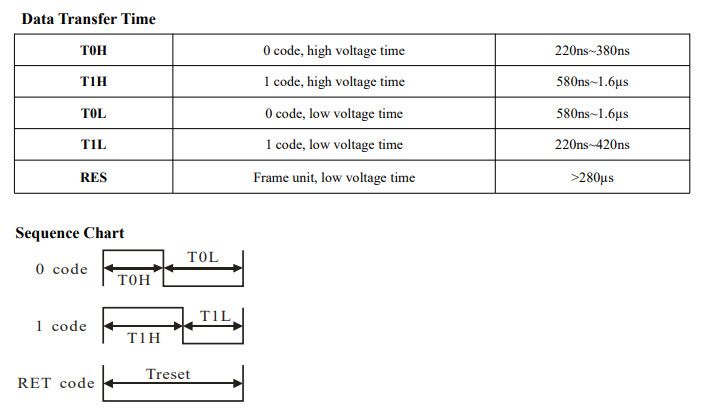
WS2812C 裡面有 R、G、B 三顆 LED,每顆 LED 用一個 Byte 來代表亮度,傳送的串列訊號如下:

因為只有一隻 DI 腳位,因此,對於時序有一些要求,如果要傳送 0,需要的時序是 T0H(300ns)+T0L(850ns),而傳送 1 則是 T1H(800ns)+T1L(400ns),結尾需要傳送 RET(>280us)
GPIO 位址
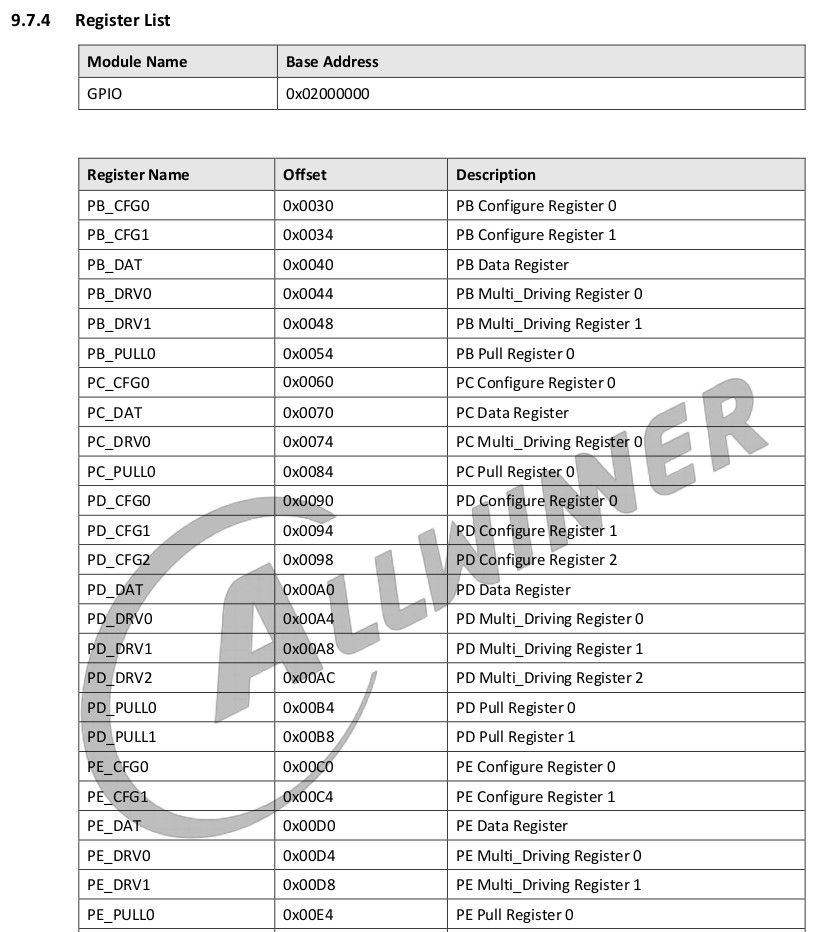
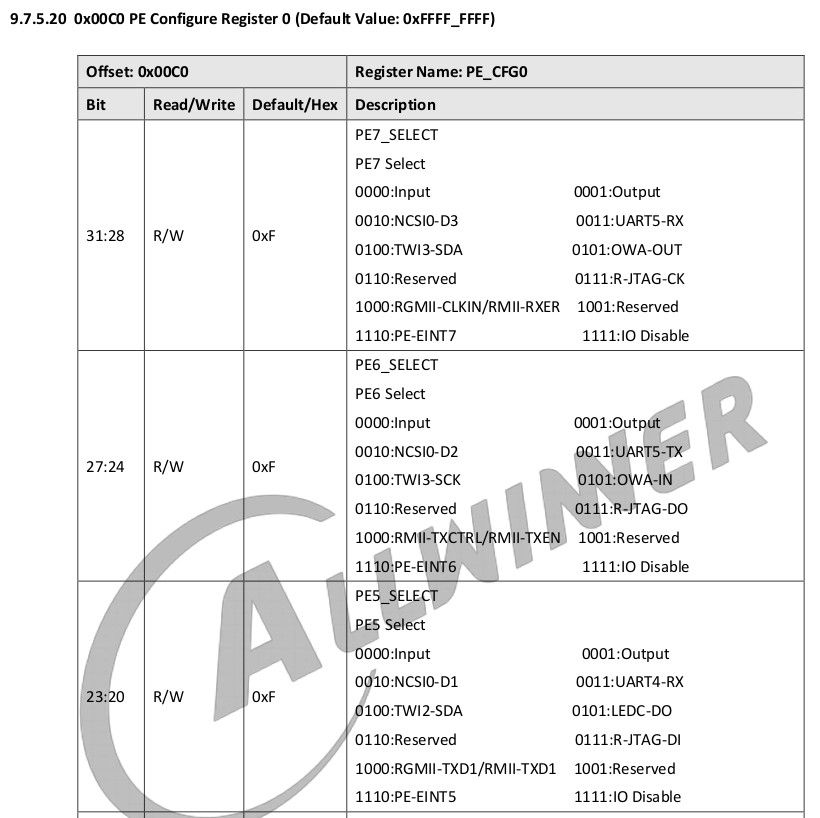
PE_CFG0 (0x0101 = LEDC-DO)
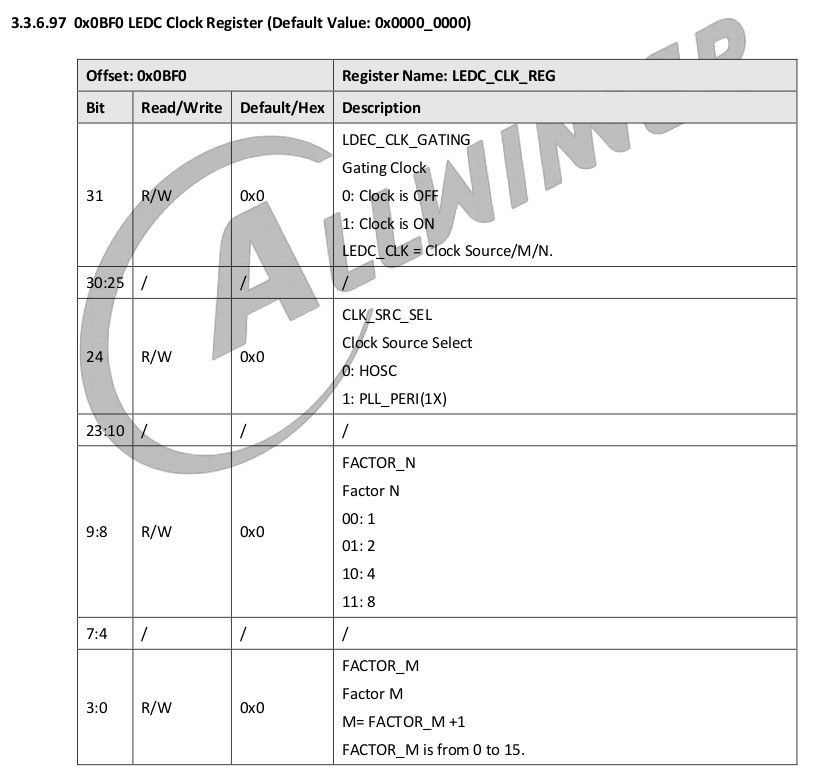
LEDC Clock 可以使用 HOSC、PeriPLL1x

CCU 位址

LEDC Clock

目前使用 HOSC
Clock Reset、Gating
目前關閉 DMA
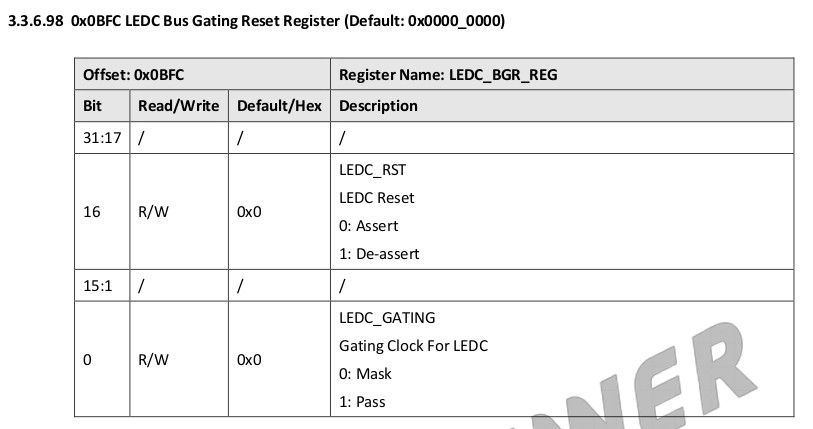
main.s.global _start .equ CCU_BASE, 0x02001000 .equ GPIO_BASE, 0x02000000 .equ LEDC_BASE, 0x02008000 .equ PE_CFG0, 0x00c0 .equ _1S, 200000000 .equ LEDC_CLK_REG, 0x0bf0 .equ LEDC_BGR_REG, 0x0bfc .equ LEDC_CTRL_REG, 0x0000 .equ LED_T01_TIMING_CTRL_REG, 0x0004 .equ LEDC_DATA_FINISH_CNT_REG, 0x0008 .equ LED_RESET_TIMING_CTRL_REG, 0x000c .equ LEDC_WAIT_TIME0_CTRL_REG, 0x0010 .equ LEDC_DATA_REG, 0x0014 .equ LEDC_DMA_CTRL_REG, 0x0018 .equ LEDC_INT_CTRL_REG, 0x001c .equ LEDC_INT_STS_REG, 0x0020 .equ LEDC_WAIT_TIME1_CTRL_REG, 0x0028 .text .long 0x4000006f .byte 'e','G','O','N','.','B','T','0' .long 0x5F0A6C39 .long 0x8000 .long 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .long 0, 0, 0, 0, 0, 0, 0, 0 .org 0x0400 _start: li t0, (1 << 16) | (1 << 0) li a0, CCU_BASE + LEDC_BGR_REG sw t0, 0(a0) li t0, (1 << 31) li a0, CCU_BASE + LEDC_CLK_REG sw t0, 0(a0) li t0, 0x500000 li a0, GPIO_BASE + PE_CFG0 sw t0, 0(a0) li t0, (0x14 << 21) | (0x06 << 16) | (0x07 << 6) | (0x13 << 0) li a0, LEDC_BASE + LED_T01_TIMING_CTRL_REG sw t0, 0(a0) li t0, (0x1d4c << 16) li a0, LEDC_BASE + LEDC_DATA_FINISH_CNT_REG sw t0, 0(a0) li t0, (0x1d4c << 16) li a0, LEDC_BASE + LED_RESET_TIMING_CTRL_REG sw t0, 0(a0) li t0, (0xff << 0) li a0, LEDC_BASE + LEDC_WAIT_TIME0_CTRL_REG sw t0, 0(a0) li t0, 0 li a0, LEDC_BASE + LEDC_DMA_CTRL_REG sw t0, 0(a0) li t0, 0 li a0, LEDC_BASE + LEDC_INT_CTRL_REG sw t0, 0(a0) li t1, 0 li t2, (1 << 12) 0: li t0, (1 << 16) | (1 << 5) | (1 << 4) | (1 << 3) | (1 << 2) | (1 << 0) li a0, LEDC_BASE + LEDC_CTRL_REG sw t0, 0(a0) xor t1, t1, t2 li a0, LEDC_BASE + LEDC_DATA_REG sw t1, 0(a0) 1: li a0, LEDC_BASE + LEDC_INT_STS_REG lw t0, 0(a0) and t0, t0, 1 beqz t0, 1b sw t0, 0(a0) li t0, _1S jal delay j 0b delay: addi t0, t0, -1 bgtz t0, delay jr ra .end
main.ldMEMORY { FLASH : ORIGIN = 0, LENGTH = 32M } SECTIONS { .text : { *(.text*) } > FLASH .rodata : { *(.rodata*) } > FLASH .bss : { *(.bss*) } > FLASH }
gen_checksum.pyimport struct import os blocksize = 0x4000 stamp = 0x5f0a6C39 checksum_offset = 0x0c length_offset = 0x10 def pad_to_roundup(data: bytearray, boundary): excess = len(data) % boundary if excess: data += b'\0' * (boundary - excess) def main(): # little endian + unsigned int uint32iter = struct.Struct('<I') input_img = open(os.sys.argv[1], 'rb') rawbytes = bytearray(input_img.read()) pad_to_roundup(rawbytes, blocksize) uint32iter.pack_into(rawbytes, checksum_offset, stamp) uint32iter.pack_into(rawbytes, length_offset, len(rawbytes)) checksum = 0 for uint32 in uint32iter.iter_unpack(rawbytes): checksum += uint32[0] uint32iter.pack_into(rawbytes, checksum_offset, checksum % (2**32)) output_img = open(os.sys.argv[2], 'wb') output_img.write(rawbytes) output_img.close() input_img.close() if __name__ == '__main__': main()
Makefileall: riscv64-unknown-linux-gnu-as -o main.o main.s riscv64-unknown-linux-gnu-ld -T main.ld -o main.elf main.o riscv64-unknown-linux-gnu-objcopy -O binary main.elf tmp.bin python3 gen_checksum.py tmp.bin main.bin run: xfel ddr f133 && xfel write 0x40000000 main.bin && xfel exec 0x40000000 clean: rm -rf main.bin main.o main.elf tmp.bin
連接 USB 到 PC$ lsusb Bus 002 Device 064: ID 1f3a:efe8 Onda (unverified) V972 tablet in flashing mode
編譯$ make riscv64-unknown-linux-gnu-as -o main.o main.s riscv64-unknown-linux-gnu-ld -T main.ld -o main.elf main.o riscv64-unknown-linux-gnu-objcopy -O binary main.elf tmp.bin python3 gen_checksum.py tmp.bin main.bin
下載$ sudo make run xfel ddr f133 && xfel write 0x40000000 main.bin && xfel exec 0x40000000 100% [================================================] 16.000 KB, 383.004 KB/s
完成


開頭使用 0x4000006f,它是一個跳躍指令,因為第 4 個 Byte 後的資料會由 BROM 使用,至於司徒為何要保留長度 1024 (0x400)?因為 F133 的中斷向量總共有 223 個,中斷向量位址達到 0x380,因此,司徒就從 0x400 開始執行,至於 BROM 使用的資料格式,可以參考 https://github.com/Ouyancheng/FlatHeadBro/blob/master/boot0/boot0-header.c$ /opt/f133/bin/riscv64-unknown-linux-gnu-objdump -bbinary -mriscv:rv64 -D main.bin | head -n20 main.bin: file format binary Disassembly of section .data: 0000000000000000 <.data>: 0: 4000006f j 0x400 4: 4765 li a4,25 6: 422e4e4f fnmadd.d ft8,ft8,ft2,fs0,rmm a: 3054 fld fa3,160(s0) c: 8c78 0x8c78 e: 9a24 0x9a24 10: 4000 lw s0,0(s0) ... 3fe: 0000 unimp 400: 001002b7 lui t0,0x100 404: 02000537 lui a0,0x2000 408: 0c05051b addiw a0,a0,192 40c: 00552023 sw t0,0(a0) # 0x2000000
仔細的玩家應該可以發現,RISC-V 沒有 MIPS 的 Delay Slot,不需要在跳躍指令後面塞一個 nop 或者做指令排序,在開發 PSP 模擬器踩到的坑洞,看來 RISC-V 應該解決了,而所謂的 Delay Slot 指的就是如下狀況:lw v0,4(v1) # load word from address v1+4 into v0 nop # wasted load delay slot jr v0 # jump to the address specified by v0 nop # wasted branch delay slot如果 jr 後面沒有插入 nop,則會跑飛,因為 jr 慢了一步執行(提取、解碼、執行),這種 Delay Slot 狀況是跟架構設計有關係,不過,司徒可以看到 RISC-V 的進步,真是感動流淚~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@whycan
沒關係, 屏的部份先這樣就可以, 我之後在移植 Linux Kernel 時, 再來說明一下撕裂的原因, 感謝
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
由於 KOF97 角色很多, 逆向需要花費相當多的時間去分析, 感謝 bankbank 的時間,
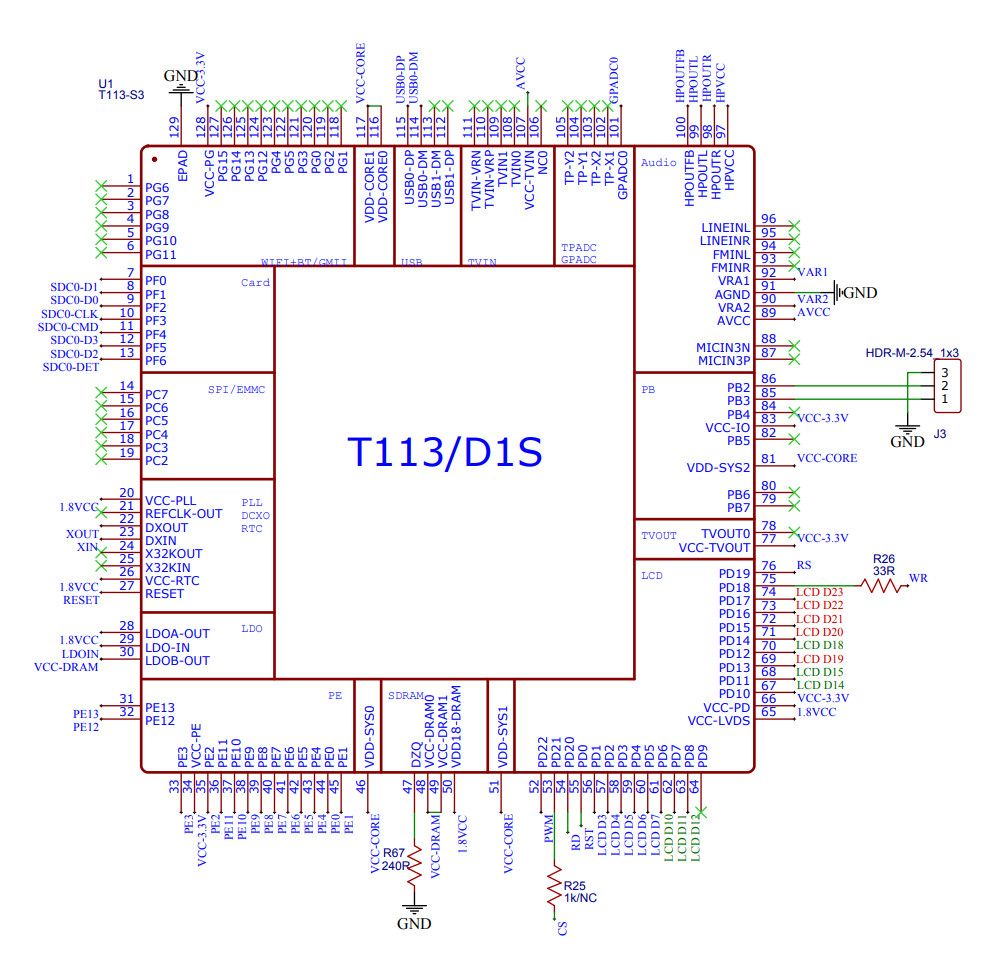
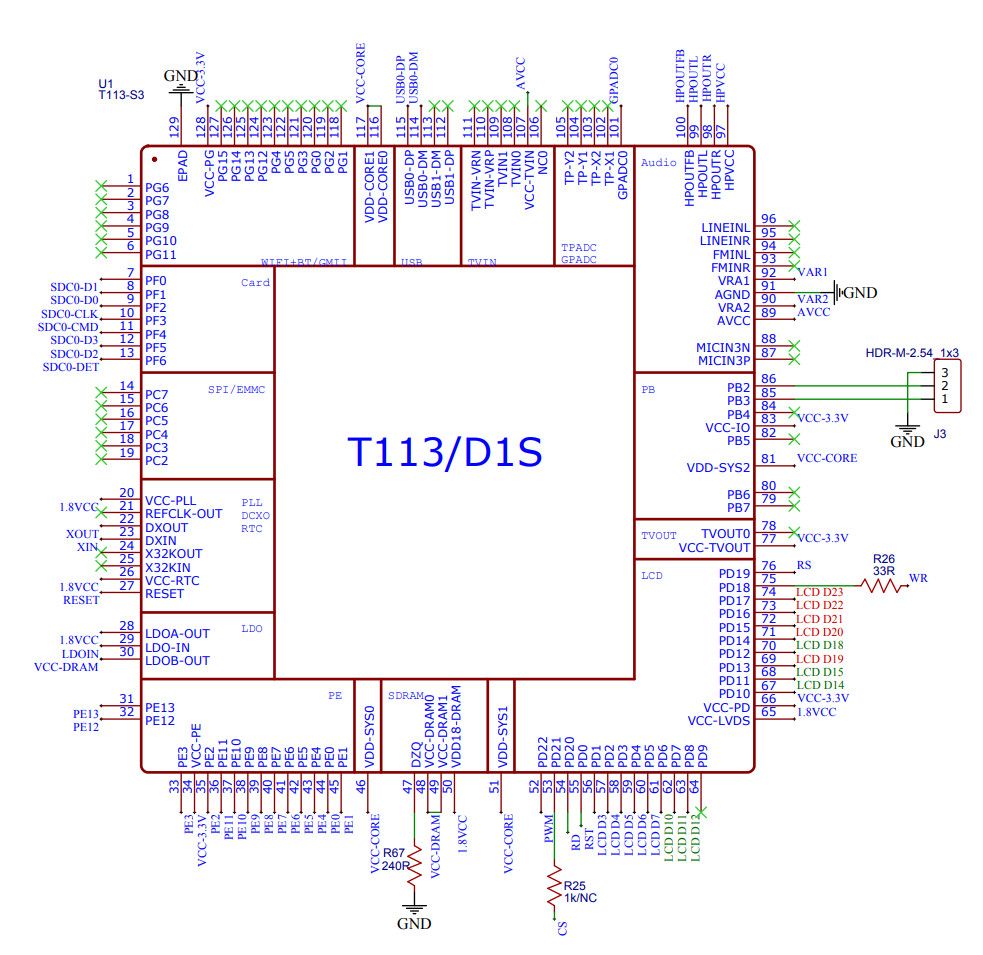
 , 於此同時, 司徒也會開始針對系統做移植, 而依照司徒的慣例, 都是先從硬件下手, 等待比較熟悉硬件後, 才會開始做移植的東西~感謝暈哥的開源文件, 將硬件原理圖開源出來, 原理圖設計得相當好, 如果有想要改版, 司徒這邊有一些想法, 或許可以參考一下
, 於此同時, 司徒也會開始針對系統做移植, 而依照司徒的慣例, 都是先從硬件下手, 等待比較熟悉硬件後, 才會開始做移植的東西~感謝暈哥的開源文件, 將硬件原理圖開源出來, 原理圖設計得相當好, 如果有想要改版, 司徒這邊有一些想法, 或許可以參考一下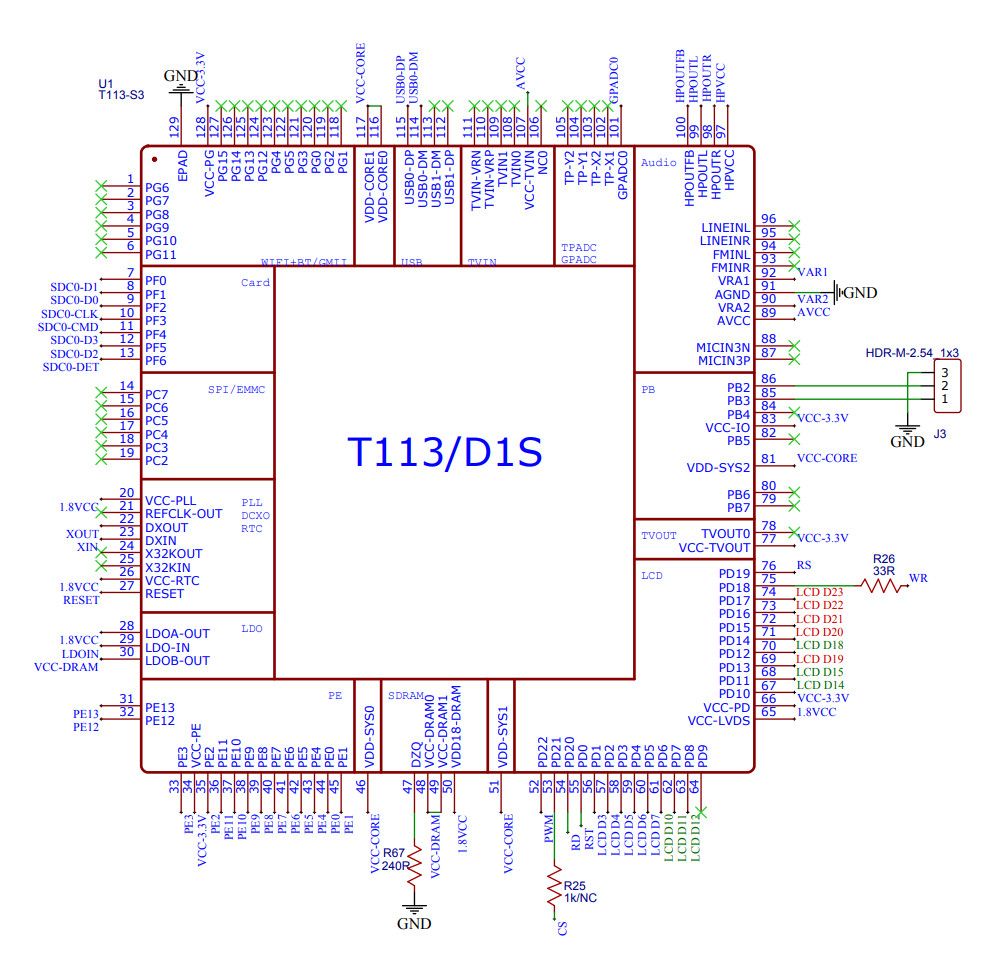
建議把CTRL拉到GPIO,方便用來控制雜音
MicroSD訊號沒有上拉電阻,因此,要注意PCB線長
GPIO都拉到獨立GPIO使用,避免鬼鍵問題,不過,可以使用晶片內部的提昇電阻,這樣可以減少電阻拉線

背光建議使用IC,避免壓降問題,屏使用RGB-565,建議找有TE(FRAME)的屏,這樣可以有效控制閃屏問題
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
逆向工程並非用於破壞攻擊的目的, 取而代之, 它是一個可以更了解細節的技術, 以這樣的角度, 則逆向變得更有趣, 就如同 bankbank 介紹的過程一樣, 透過查看變數而知道一些細節, 或許有些人不好意思詢問 bankbank 問題, 因此, 司徒帶大家走一下步驟:
準備好 kof97.zip, neogeo.zip 後, 開啟 debug 模式
$ mame kof97.zip -debug -resolution 320x240可以設定WatchPoint的地方
按下F11並且輸入wp 0x10843B,1,w,接著再按下F5執行
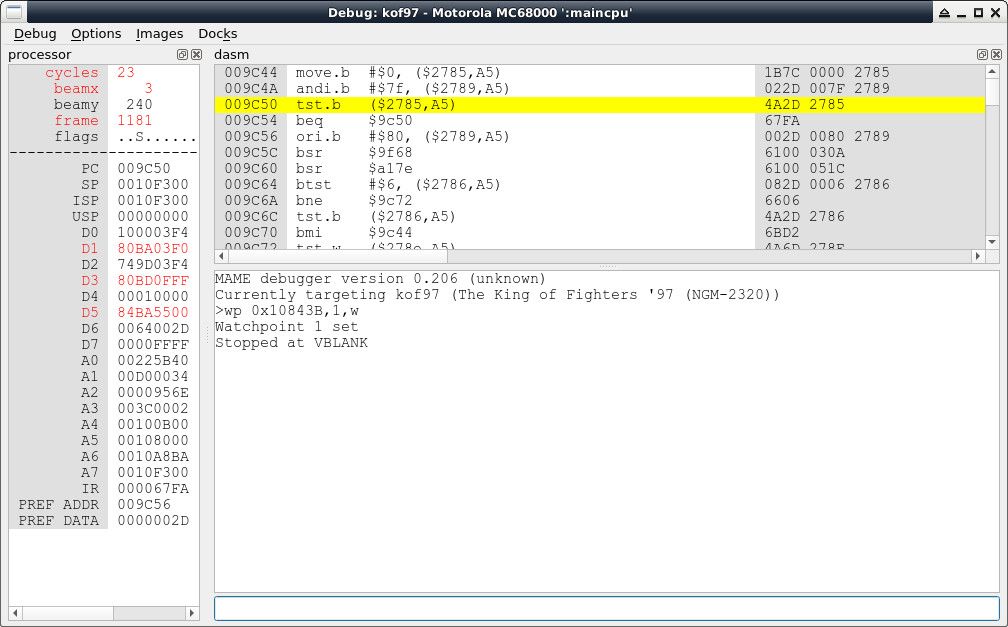
P2被攻擊後就會觸發中斷, 是不是很簡單~
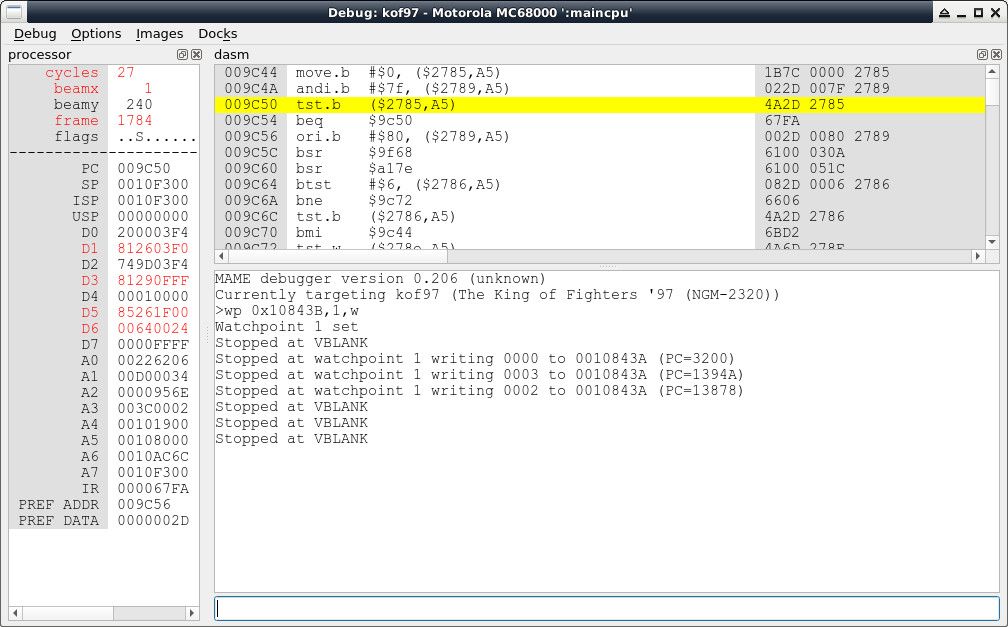
bankbank 透過尋找出一些位址, 讓大家知道模擬器是如何知道一些細節, 這也是振動需要判斷的數值, 這些看似很高深的技術, 其實透過說明, 大家都可以很容易上手, 因此, 如何讓懷舊遊戲變得更有趣, 有時候, 你也可以好好思考如何讓你喜愛的遊戲變得更好玩, 這才是樂趣所在, 當然, 大家更應該正向來看待逆向工程技術, 而基於一些原因, 我們盡量點到就好, 相信 bankbank 之後會為我們帶來更好玩的東西~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
@livpo
恭喜你答錯了
取名小志是因為機器夠小而且使用全志晶片, 所以才使用小志這個名字, 至於未來是否還會有中志、大志掌機, 你可以建議給暈哥, 因為機器是由他們製作, 至於我們之後會玩什麼掌機, 目前不知道~
-
回复: Gaviar Handheld (小志掌機)发布在 爱搞机专区
Allwinner F133(D1s) 是 RISC-V 64位元架構, 就規格面來看, 應該是可以對應到 Ingenic JZ4760B 600MHz, 也就是 RS-97 掌機 (RetroGame), LDK GAME 掌機(小龍王)這一系列的等級, 當然 bankbank 和司徒是以 RISC-V 的軟件角度切入, 因此, 剛好可以趁機來看一下 RISC-V 跟 MIPS 的差距會有多大~
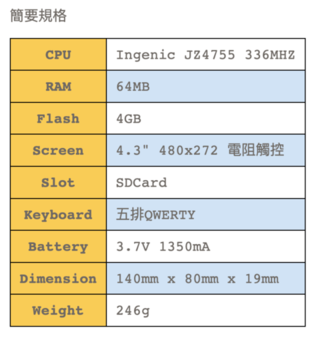
簡要規格

TRIMUI SMART

GAME GEAR Micro

Arduboy

FunKeyS (對不起只剩下屍體)

舊 3DS

正面

USB-TypeC、耳機孔

電源開關
R、MicroSD、L

音量開關
背面
拆掉類比搖桿帽子才可以提起A面

提起 A 面

A 面

屏


PCB
電源開關往下才可以取出 PCB

電池物品禁止發送到台灣,因此,司徒需要自行焊接電池,這個空間相當適合其它改造
正面
Allwinner F133 (D1s)

-
Gaviar Handheld (小志掌機)发布在 爱搞机专区

中文名稱:小志掌機
英文名稱:Gaviar Handheld
開源方式:GPL License
開發人員:bankbank (銀行銀行)、steward (司徒)
開發目的:學習 RISC-V、體驗 KOF97 振動版
面向玩家:喜愛 DIY 樂趣、掌機的玩家
更新時間:由於我們的本業都跟這些無關, 只能利用閒餘時間研究, 因此, 每次更新的時間有可能長達一個月功能簡介:
RISC-V 是一個趨勢, 只是目前比較少有掌機面市, 因此, bankbank 和司徒將會以軟件面向, 從頭做起, 並且將這些過程紀錄下來, 以供日後參考, 除了可以學習 RISC-V 的軟件開發之外, bankbank 也會進行 KOF97 遊戲逆向分析, 分析的目的並不是要修改 KOF97 ROM, 而是要讓模擬器知道哪些角色的招式可以去驅動振動馬達, 因為讓 KOF97 具備振動功能是 bankbank 跟司徒的夢想, KOF97 振動版相信可以再度勾起童年的快樂回憶, 由於逆向遊戲比較敏感, 因此, 盡量以點到為止購買事項:
小志掌機是由暈哥製作並提供給 bankbank 和司徒,因此,如果想要購買的人可以去找暈哥,bankbank 和司徒並沒有參與任何販賣事項,司徒跟 bankbank 只是以開源的方向來研究這台掌機,當然所有的資源都是公開,因此,司徒比較建議玩家從 GitHub 下載並且自己動手列印製作,這樣會更有樂趣資料倉庫:
https://github.com/Strugglemeat/gngeo
https://github.com/steward-fu/archives/releases/tag/f133預計流程:
- 逆向 KOF97
- 硬件說明
- 硬件功能確認
-
- 點屏
-
- 按鍵
-
- 聲音
- 移植 Boot Loader
- 移植 Linux Kernel
-
- 屏幕驅動
-
- 按鍵驅動
-
- 聲音驅動
-
- 電池驅動
- 建置 Linux OS
- 移植 GNGEO 模擬器
-
- 支援振動功能
結帖時間:視情況而定
贊助連結:
https://store.steampowered.com/search/?developer=bankbank&ndl=1
https://play.google.com/store/apps/details?id=com.stylus.cavesweeper&gl=US&pli=1注意事項:
由於此貼屬於開源專案, 因此, 司徒的仇家預計將前來尋仇, 這部分需要請管理員幫忙過濾惡意攻擊的言論, 如果無法有效制止, 此帖將提早結束, 我們將繼續漂流尋找下一個可以撰寫文章的地方關於 bankbank (銀行銀行):
romhacker and retro gamedev bankbank ( bankbank.net ), very focused on 68000, also interested in SH-2. my favorite game is Tetris the Grand Master 2 Plus. my dream is to make games and hacks that many people can enjoy. YouTube: https://www.youtube.com/bankbank關於 steward (司徒):
喜歡惡搞掌機, 賦予掌機另一種生命力, 藉由惡搞掌機來回味童年的美好, 誰叫掌機要惡搞當年的我前言:
司徒相當高興可以遇到 Hack ROM 的高手 bankbank, bankbank 除了喜愛 Hack ROM 之外, 也熱愛 DIY 的樂趣, bankbank 本身可以閱讀簡單的中文, 因此, 如果需要詢問 bankbank 問題, 請盡量使用簡單的中文詞彙或者使用英文發問, 由於這個開源專案是從頭做起, 難免會遇到無法預期的開發問題, 加上 bankbank 和司徒的本業並非這個領域, 因此, 只能利用瑣碎時間研究, 基於熱愛掌機所發起的開源專案, 因此, 請不要催促開發進度振動原理簡介:
左、右馬達用來代表左、右的方向, 此例使用大門武郎的岚之山, 大絕招一發動時, 同時振動馬達

右摔時,右邊振動馬達開始振動

左摔時,左邊振動馬達開始振動

-
回复: MQ-T113使用xboot驱动GT911时中断无法使用发布在 爱搞机专区
@Ary_Ye
I2C 訊號需要先確定再去看中斷問題, 就我的測試, I2C 應該是可以正常工作, 所以你可以往硬件問題排錯, 例如:I2C 上拉電阻等問題, 或者延長 XBoot 對 GT911 的 Reset 時間~
-
回复: MQ-T113使用xboot驱动GT911时中断无法使用发布在 爱搞机专区
@Ary_Ye XBoot在T113-S3上的中斷設定確實有問題, 分析如下:
文章有點長,可以直接拉到底下看workaround方式
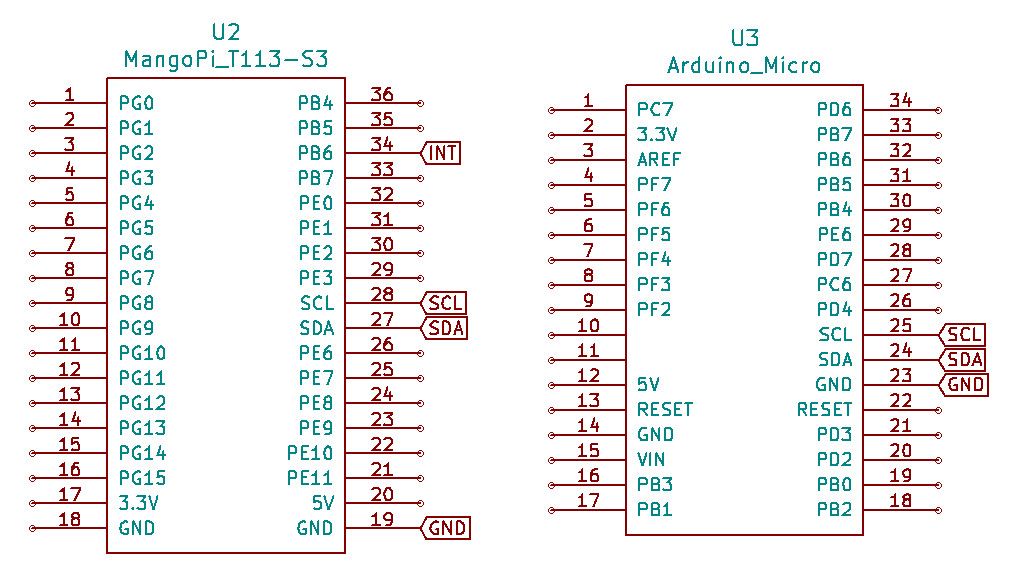
司徒終於從冰箱找到芒果派T113-S3開發板
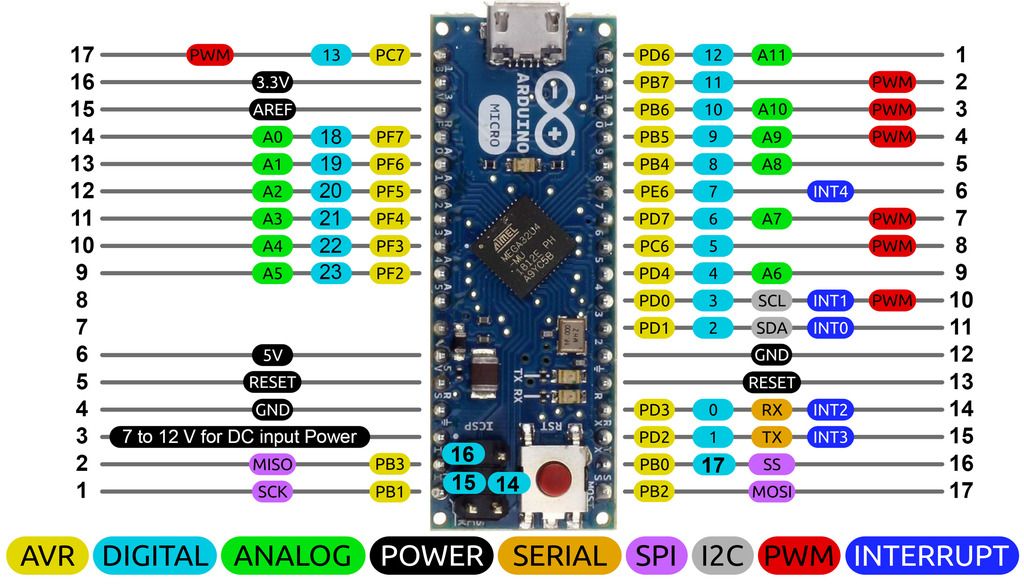
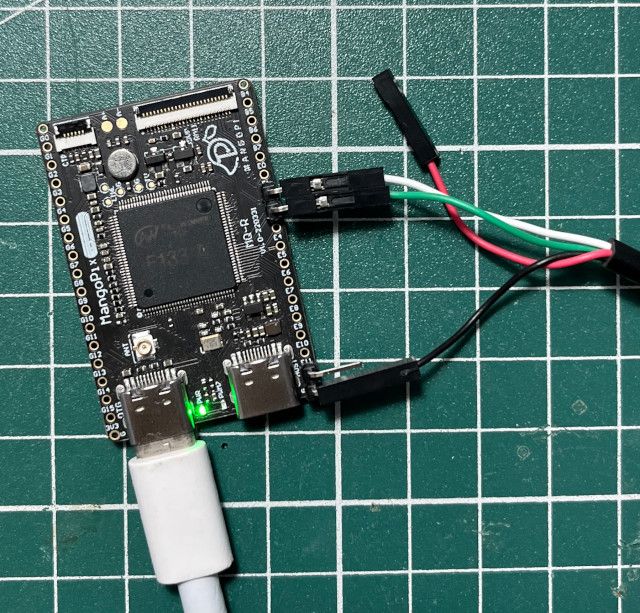
司徒手上並沒有GT911觸控板,因此,司徒使用Arduino Micro模擬GT911訊號
Arduino腳位:
T113-S3腳位:
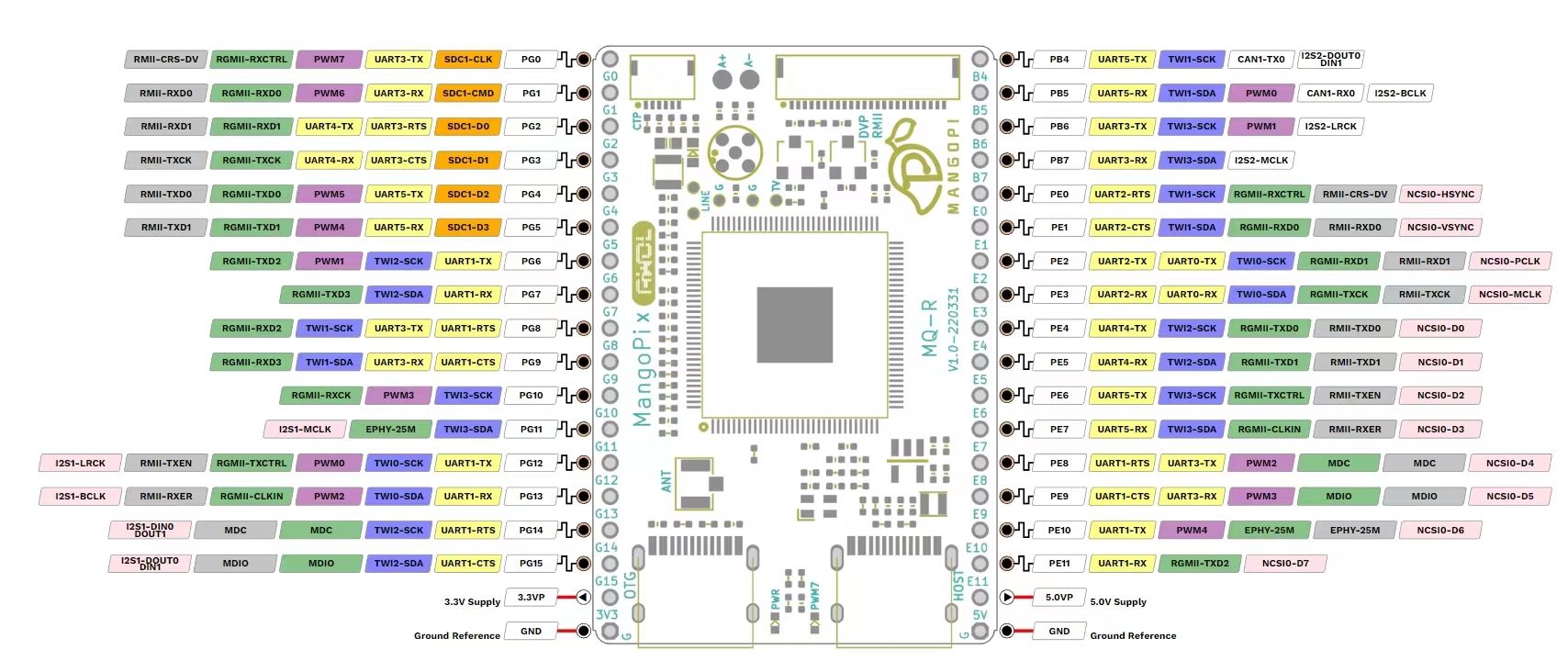
司徒將GT911 I2C訊號接到T113-S3 I2C-2,GT911的中斷則是接到T113-S3 PB6(手動觸發)
杜邦線連接
Arduino模擬GT911程式
#include <Wire.h> unsigned short rx = 0; void receiveEvent(int howMany) { if(howMany == 2){ rx = Wire.read(); rx<<= 8; rx|= Wire.read(); } else{ while (Wire.available()) { Wire.read(); } } Serial.print("howMany:"); Serial.print(howMany); Serial.print("\n"); Serial.print("0x"); Serial.print(rx, HEX); Serial.print("\n"); } unsigned short x = 0; unsigned short y = 0; void requestEvent() { switch(rx){ case 0x8047: Wire.write(byte(0x01)); break; case 0x8140: Wire.write('A'); Wire.write('B'); Wire.write('C'); Wire.write('D'); break; case 0x8144: Wire.write(byte(0x12)); Wire.write(byte(0x34)); break; case 0x814e: Wire.write(byte(0x80 | 1)); break; case 0x814f: Wire.write(byte(0x01)); Wire.write(byte(x)); Wire.write(byte(x >> 8)); Wire.write(byte(y)); Wire.write(byte(y >> 8)); Wire.write(byte(0x00)); Wire.write(byte(0x00)); Wire.write(byte(0x00)); x+= 1; y+= 1; break; } rx = 0; } void setup() { Wire.begin(20); Wire.onReceive(receiveEvent); Wire.onRequest(requestEvent); Serial.begin(115200); } void loop() { delay(100); }src/arch/arm32/mach-t113s3/romdisk/boot/mangopi.json
524 "i2c-t113:2@0x02502800": { 525 "clock-name": "bus-i2c2", 526 "clock-frequency": 400000, 527 "reset": 466, 528 "sda-gpio": 133, 529 "sda-gpio-config": 4, 530 "scl-gpio": 132, 531 "scl-gpio-config": 4 532 }, 662 "ts-gt911": { 663 "i2c-bus": "i2c-t113.2", 664 "slave-address": 20, 665 "interrupt-gpio": 38, 666 "interrupt-gpio-config": 14, 667 "reset-gpio": 34, 668 "reset-gpio-config": 1 669 },src/arch/arm32/mach-t113s3/driver/ts-gt911.c
75 static bool_t gt911_write(struct i2c_device_t * dev, u16_t reg, u8_t * buf, int len) 76 { 77 struct i2c_msg_t msg; 78 u8_t mbuf[256]; 79 80 if(len > sizeof(mbuf) - 1) 81 len = sizeof(mbuf) - 1; 82 mbuf[0] = (reg >> 8) & 0xff; 83 mbuf[1] = (reg >> 0) & 0xff; 84 memcpy(&mbuf[2], buf, len); 85 86 msg.addr = dev->addr; 87 msg.flags = 0; 88 msg.len = 32;//len + 2; 89 msg.buf = &mbuf[0]; 90 91 if(i2c_transfer(dev->i2c, &msg, 1) != 1) 92 return FALSE; 93 return TRUE; 94 } 134 static bool_t gt911_initial(struct i2c_device_t * dev) 135 { 136 u8_t cfg; 137 u8_t id[4]; 138 u8_t ver[2]; 139 140 if(!gt911_read(dev, GT911_CONFIG_DATA, &cfg, 1)) 141 return FALSE; 142 if(!gt911_read(dev, GT911_PRODUCT_ID, &id[0], 4)) 143 return FALSE; 144 if(!gt911_read(dev, GT911_FIRMWARE_VERSION, &ver[0], 2)) 145 return FALSE; 146 147 LOG("GT911 Version: %c%c%c%c(0x%02x%02x)(0x%02x)\r\n", id[0], id[1], id[2], id[3], ver[1], ver[0], cfg); 148 return gt911_send_cfg(dev, (u8_t *)gt911_config_data, ARRAY_SIZE(gt911_config_data)); 149 } 151 static void gt911_interrupt(void * data) 152 { 153 struct input_t * input = (struct input_t *)data; 154 struct ts_gt911_pdata_t * pdat = (struct ts_gt911_pdata_t *)input->priv; 155 u8_t status, buf[40]; 156 u8_t * p; 157 int count, i; 158 int id, x, y; 159 160 LOG("%s++\r\n", __func__); 161 disable_irq(pdat->irq); 162 for(i = 0; i < 5; i++) 163 { 164 pdat->node[i].valid = 0; 165 } 166 if(gt911_read(pdat->dev, GT911_STATUS, &status, 1) && (status & (1 << 7))) 167 { 168 count = status & 0x0f; 169 if(count > 0 && count < 5) 170 { 171 if(gt911_read(pdat->dev, GT911_COOR_ADDR, &buf[0], count << 3)) 172 { 173 for(i = 0; i < count; i++) 174 { 175 p = &buf[i << 3]; 176 id = p[0]; 177 x = (p[2] << 8) | (p[1] << 0); 178 y = (p[4] << 8) | (p[3] << 0); 179 LOG("%s, count:%d, x:%d, y:%d\r\n", __func__, count, x, y); ... 209 enable_irq(pdat->irq); 210 LOG("%s--\r\n", __func__); 211 }編譯、下載
$ make CROSS_COMPILE=arm-linux-gnueabihf- PLATFORM=arm32-t113s3 $ xfel ddr t113-s3 $ xfel write 0x40000000 output/xboot.bin $ xfel exec 0x40000000Arduino GT911可以正常工作,但是,中斷PB6無法被觸發
[ 0.260214]GT911 Version: ABCD(0x3412)(0x01) [ 0.287074]Probe device 'ts-gt911.0' with ts-gt911為了方便測試,司徒將PB6加上提昇電阻並且改成Falling中斷觸發
282 LOG("%s, gpio:%d, gpiocfg:%d, irqnum:%d\r\n", __func__, gpio, gpiocfg, irq); 283 if(gpio >= 0) 284 { 285 if(gpiocfg >= 0) 286 gpio_set_cfg(gpio, gpiocfg); 287 gpio_set_pull(gpio, GPIO_PULL_UP); 288 } 289 request_irq(pdat->irq, gt911_interrupt, IRQ_TYPE_EDGE_FALLING, input);PB6=GPIO38、GPIOCFG=14、IRQ=262,這個IRQ應該是抓錯了?
[ 0.266982]ts_gt911_probe, gpio:38, gpiocfg:14, irqnum:262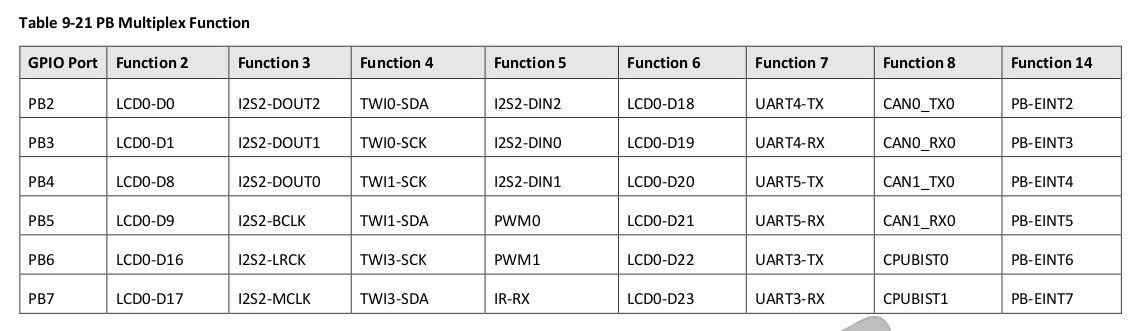
src/arch/arm32/mach-t113s3/romdisk/boot/mangopi.json
388 "irq-gic400@0x03020000": { "interrupt-base": 32, "interrupt-count": 224 }, 389 "irq-t113-gpio@0x02000220": { "interrupt-base": 224, "interrupt-count": 8, "interrupt-parent": 101 }, 390 "irq-t113-gpio@0x02000240": { "interrupt-base": 256, "interrupt-count": 8, "interrupt-parent": 103 }, 391 "irq-t113-gpio@0x02000260": { "interrupt-base": 288, "interrupt-count": 23, "interrupt-parent": 105 }, 392 "irq-t113-gpio@0x02000280": { "interrupt-base": 320, "interrupt-count": 14, "interrupt-parent": 107 }, 393 "irq-t113-gpio@0x020002a0": { "interrupt-base": 352, "interrupt-count": 7, "interrupt-parent": 109 }, 394 "irq-t113-gpio@0x020002c0": { "interrupt-base": 384, "interrupt-count": 16, "interrupt-parent": 111 },src/driver/interrupt/interrupt.c
191 bool_t request_irq(int irq, void (*func)(void *), enum irq_type_t type, void * data) 192 { 193 struct irqchip_t * chip; 194 int offset; 195 196 if(!func) 197 return FALSE; 198 199 chip = search_irqchip(irq); 200 if(!chip) 201 return FALSE; 202 203 offset = irq - chip->base; 204 if(chip->handler[offset].func != null_interrupt_function) { 205 return FALSE; 206 } 207 208 LOG("%s, irq:%d, chip->base:%d, offset:%d\r\n", __func__, irq, chip->base, offset);XBoot修改到的中斷地址是屬於PC6,但是司徒的中斷是設定成PB6
[ 0.272634]request_irq, irq:262, chip->base:256, offset:6src/arch/arm32/mach-t113s3/driver/irq-t113-gpio.c
92 addr = pdat->virt + GPIO_INT_CFG0 + ((offset >> 3) << 2); 93 val = read32(addr); 94 val &= ~(0xf << ((offset & 0x7) << 2)); 95 val |= ((cfg & 0x7) << ((offset & 0x7) << 2)); 96 write32(addr, val); 97 98 LOG("%s, addr:%p, type:%d, offset:%d\r\n", __func__, addr, type, offset);果然修改到PC6 0x02000240
[ 0.268151]ts_gt911_probe, gpio:38, gpiocfg:14, irqnum:262 [ 0.273812]request_irq, irq:262, chip->base:256, offset:6 [ 0.279202]irq_t113_gpio_settype, addr:0x02000240, type:3, offset:6 [ 0.285373]Probe device 'ts-gt911.0' with ts-gt911PB6是位於0x02000230
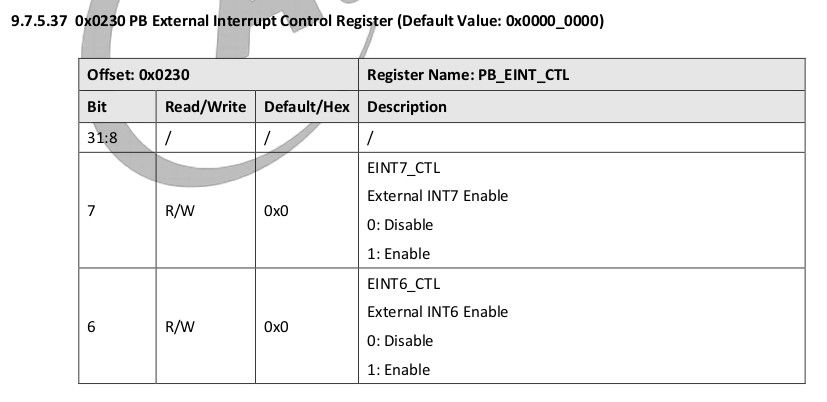
Workaround (src/driver/interrupt/interrupt.c)
62 static struct irqchip_t * search_irqchip(int irq) 63 { 64 struct device_t * pos, * n; 65 struct irqchip_t * chip; 66 67 list_for_each_entry_safe(pos, n, &__device_head[DEVICE_TYPE_IRQCHIP], head) 68 { 69 chip = (struct irqchip_t *)(pos->priv); 70 if(irq == 230){ 71 if(chip->base == 224){ 72 return chip; 73 } 74 continue; 75 } 76 if((irq >= chip->base) && (irq < (chip->base + chip->nirq))) 77 return chip; 78 } 79 return NULL; 80 } 191 bool_t request_irq(int irq, void (*func)(void *), enum irq_type_t type, void * data) 192 { 193 struct irqchip_t * chip; 194 int offset; 195 196 if(!func) 197 return FALSE; 198 199 if(irq == 262){ 200 irq-= 32; 201 }修改後,就可以正常中斷觸發並且回報觸控點
[ 0.260653]GT911 Version: ABCD(0x3412)(0x01) [ 0.266935]ts_gt911_probe, gpio:38, gpiocfg:14, irqnum:262 [ 0.272326]request_irq, irq:230, chip->base:224, offset:6 [ 0.277959]irq_t113_gpio_settype, addr:0x02000220, type:3, offset:6 [ 0.299301]Probe device 'ts-gt911.0' with ts-gt911 [ 0.304091]Probe device 'g2d-t113.0' with g2d-t113 [ 0.310178]Probe device 'fb-t113-rgb.0' with fb-t113-rgb [ 0.315658]Probe device 'console-uart.0' with console-uart [ 0.322001]mount /private with 'ram' filesystem Press any key to stop auto boot: 0.000 xboot: /# [ 5.434256]gt911_interrupt++ [ 5.440101]gt911_interrupt, count:1, x:1, y:1 [ 5.446270]gt911_interrupt-- [ 9.054572]gt911_interrupt++ [ 9.060405]gt911_interrupt, count:1, x:2, y:2 [ 9.066782]gt911_interrupt--
-
回复: MQ-T113使用xboot驱动GT911时中断无法使用发布在 爱搞机专区
@ary_ye 不過, 從你的圖片看來, 這個 I2C 訊號也不太像是 SCL, SDA 的訊號 ? 這樣你還可以從 xboot 拿到觸控的資料 ?
-
回复: MQ-T113使用xboot驱动GT911时中断无法使用发布在 爱搞机专区
目前 XBOOT 有支援 GT-911 的平台如下:
./src/arch/riscv64/mach-f133/driver/ts-gt911.c ./src/arch/arm32/mach-t113s3jd/driver/ts-gt911.c ./src/arch/arm32/mach-t113s3/driver/ts-gt911.c ./src/arch/arm32/mach-z11s/driver/ts-gt911.c手上剛好有 F133 板子, 但是我沒有 GT-911 觸控板, 如果需要或許可以用 Arduino 模擬~
不過, 找問題的方式應該大同小異, 因此, 我用 F133 說一下,
json 檔案確定有設定成 okay"ts-f133@0x02009c00": { "clock-name": "link-tpadc", "interrupt": 78, "reset": 1136, "median-filter-length": 5, "mean-filter-length": 5, "calibration": [168012, -57, -137136144, -344, 8674, -2840431, 65536], "status": "okay" }, "ts-gt911": { "i2c-bus": "i2c-f133.2", "slave-address": 20, "interrupt-gpio": 35, "interrupt-gpio-config": 14, "reset-gpio": 34, "reset-gpio-config": 1, "status": "okay" },然後埋一些 LOG, 先確定觸控板有被正確配置
static bool_t gt911_initial(struct i2c_device_t * dev) { u8_t cfg; u8_t id[4]; u8_t ver[2]; if(!gt911_read(dev, GT911_CONFIG_DATA, &cfg, 1)) { LOG("GT911: failed to read config data\n"); return FALSE; } if(!gt911_read(dev, GT911_PRODUCT_ID, &id[0], 4)) { LOG("GT911: failed to read product id\n"); return FALSE; } if(!gt911_read(dev, GT911_FIRMWARE_VERSION, &ver[0], 2)) { LOG("GT911: failed to read firmware version\n"); return FALSE; } LOG("GT911 Version: %c%c%c%c(0x%02x%02x)(0x%02x)", id[0], id[1], id[2], id[3], ver[1], ver[0], cfg); return gt911_send_cfg(dev, (u8_t *)gt911_config_data, ARRAY_SIZE(gt911_config_data)); }埋好 LOG 之後, 下載測試
$ make CROSS_COMPILE=/opt/f133/bin/riscv64-unknown-linux-gnu- PLATFORM=riscv64-f133 $ xfel ddr f133 && xfel write 0x40000000 output/xboot.bin && xfel exec 0x40000000因為沒有連接 GT-911, 因此, 在讀取 config data 時就會出錯
[ 0.261738]GT911: failed to read config data因此, 幾個找問題的方式提供給你參考 (跟著訊號的方向找問題就可以)
- 確定觸控的資訊可以被正確讀取到, 你應該可以從 UART 看到 "GT911 Version: xxx"
- 如果可以讀取到觸控資訊, 那可以往中斷腳位的方向找問題, 例如:沒接好或者被拉高拉低等問題
-
回复: 【复刻麦当劳游戏机】用 ST7789V LCD 在 lichee pi nano (f1c100s)发布在 Linux
No, you need to fix your hardware firstly. Here is the LCD pinout for Lichee Nano:
And here is your LCD panel:

-
回复: 【复刻麦当劳游戏机】用 ST7789V LCD 在 lichee pi nano (f1c100s)发布在 Linux
Here is the schematic of PocketGo handheld: https://github.com/steward-fu/archives/releases/download/pocketgo/doc_schematic.pdf
It seems the pinout are not same as PocketGo. So, you cannot replace it directly.
-
回复: 可以在這裡寫非全志晶片的文章嗎 ?发布在 爱搞机专区
@lovexulu 你對全志晶片好熟悉~小弟給大佬請安
V851S這顆晶片也很適合使用, 我希望的需求是:
QFP包裝
兩核心(CPU >= 400MHz)
RAM >= 64MB
WiFi
BT因為我希望開機有兩種OS模式, 其中一個如果有WiFi協助是最好, 不知道全志有這樣的晶片嗎 ?
-
回复: 【复刻麦当劳游戏机】用 ST7789V LCD 在 lichee pi nano (f1c100s)发布在 Linux
@bankbank long time no see.
Please post the pinout information of the LCD panel and then we can decide how to connect it to F1C100S.
-
回复: 可以在這裡寫非全志晶片的文章嗎 ?发布在 爱搞机专区
@lovexulu 感謝你的資訊, 不過 CV1800B 似乎找不到手冊~
來個比較表看一下
-
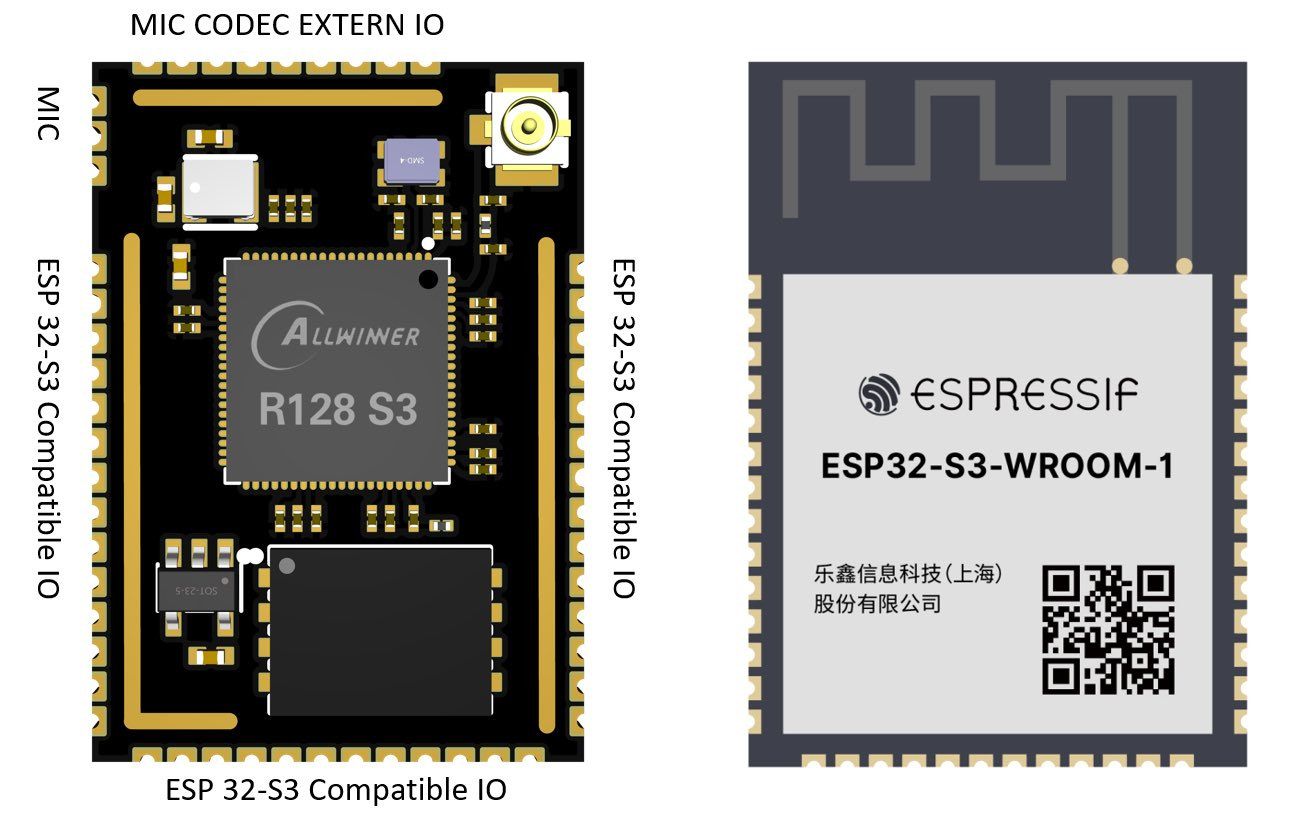
BL808
CPU RV64GCV(480MHz) + RV32GCP(320MHz) + RV32EMC(160MHz)
RAM 64MB(PSRAM)
2D DMA
WiFi + BT -
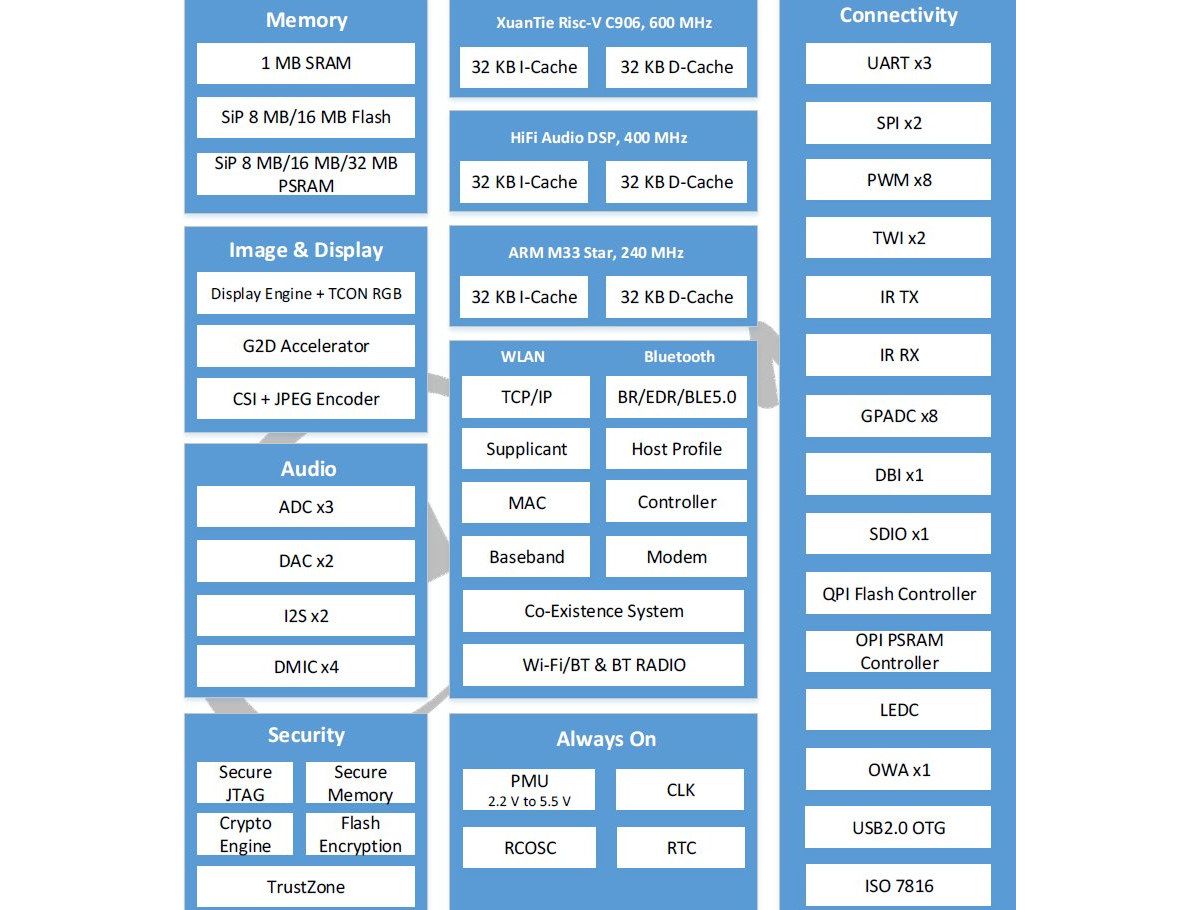
R128
CPU RV64GCV(600MHz) + Cortex-M33(240MHz)
RAM 32MB(PSRAM)
G2D
WiFi + BT -
F133
CPU RV64GCV(533MHz)
RAM 64MB(DDR2)
G2D
BL808 那個 2D DMA 真的蠻屌的, 位移、旋轉、 2D搬移, 這功能真的很適合做遊戲機, 全志 R128 如果把 M33 替換成 F1C100S IP, 繼續延續 F1C100S 生命力, 那就真的很棒, 可惜沒有~
-
-
回复: 可以在這裡寫非全志晶片的文章嗎 ?发布在 爱搞机专区
@aldfaaa 在 可以在這裡寫非全志晶片的文章嗎 ? 中说:
膜拜司徒大佬~
请多指教感謝支持~我不是大佬, 大佬是 xboot, 哈~只是 xboot 最近可能太忙了~這 R128 進度怎麼如此慢?哈哈~
司徒最近翻開冰箱才發現全志贈送的哪吒開發板已經半年沒上電了~自己購買的芒果派F133也是半年沒摸了, 心裡有些愧疚, 這才想說來整理一下 RISC-V 的東西:https://steward-fu.github.io/website/mcu.htm#risc-v
所以才發現便宜又大碗的 BL808, 哈, 所以想說找點樂趣玩玩, 不過 RISC-V 幾乎是 MIPS 那派人搞的, 司徒心想應該跟 MIPS 差不多, 這讓司徒突然想起以前的君正, 哈~就碼農角度來看, 除了多核心, 司徒目前還看不出優勢在哪 ?
-
回复: 可以在這裡寫非全志晶片的文章嗎 ?发布在 爱搞机专区
@newcastle 是地~正是小弟本人~
雖然之前說不玩寨機, 不過我還是偷偷玩, 哈哈~只是以後我不再釋出任何研究成果, 就我自己玩而已, 哈~
目前是玩 TRIMUI SMART寨機 (Allwinner S3 + RAM 128MB + eMMC 8GB + RTL8723DS), 目前還在逆向研究中, 預期要讓它跑 Linux Kernel + 精簡客製化的 Debian 桌面, 主要是想跑 WINE(arm32) 的逆向遊戲, 網址:https://steward-fu.github.io/website/handheld.htm#trimui-smart
然後, 之前有一個特別的想法, 想做一台特別的掌機, 用來懷念小時候的樂趣, 目前可能鎖定 RISC-V 晶片, 只是用哪家, 目前還在觀望, 所以我才發貼問一下是否可以寫其它家晶片的問題~哈
-
回复: 可以在這裡寫非全志晶片的文章嗎 ?发布在 爱搞机专区
太好了~司徒就知道全志是一個可以包容萬物的好廠商~哈

博流智能太不厚道了, 竟然出這種殺手等級的晶片, 感覺就是針對 ESP32 和 F133 而來, 這顆晶片的價格以及功能, 確實蠻屌的, 如果生態搞起來, 那真的要飛龍在天了~而為了可以更瞭解敵人, 司徒才想說來看看這顆 BL808 到底有多屌, 司徒的出發點是好意, 全志可別誤會司徒原意~哈哈
當然, 也感謝全志願意讓司徒在此寫一些東西~哈 !