驱动里的 引脚 PC1(nezha_tina_linux)
for (i= 0; i < 100000; i++) {
gpio_direction_output(DHT11_1_PIN, x);
x = ~x;
}
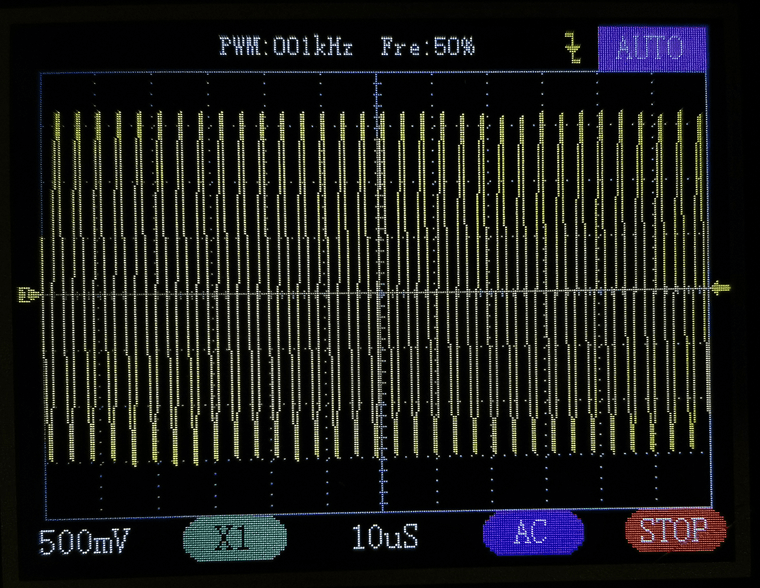
Vmax约为1.63v,百元示波器极限10us了,
问:如何计算GPIO稳定需要的时间以及gpio_direction_output(单条命令耗时);
有设备的大佬,如果可以的话,帮忙测一下来张图呗,提前跪谢~
驱动里的 引脚 PC1(nezha_tina_linux)
for (i= 0; i < 100000; i++) {
gpio_direction_output(DHT11_1_PIN, x);
x = ~x;
}
Vmax约为1.63v,百元示波器极限10us了,
问:如何计算GPIO稳定需要的时间以及gpio_direction_output(单条命令耗时);
有设备的大佬,如果可以的话,帮忙测一下来张图呗,提前跪谢~
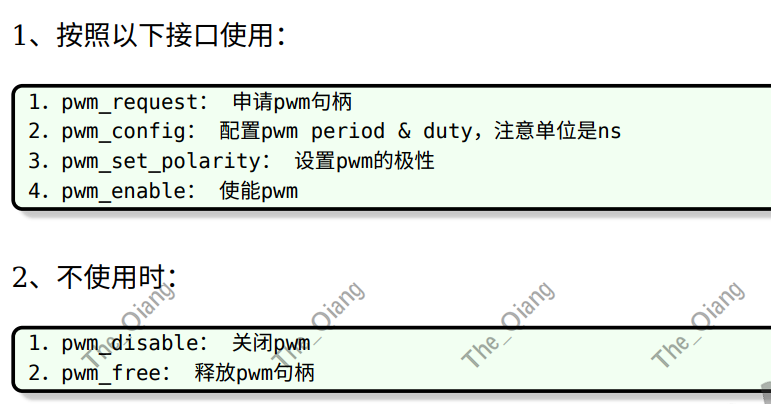
@yuzukitsuru 在 【tina_nezha】【求助】pwm无法启用/或寻其他途径控制舵机 中说:
pwm应该不是这样绑定pin的,具体看一下pwm的文档
还有个问题,求大佬指条明路,之前询问控制DHT11,说道使用告诉I2C外设来实现。大佬,具体点,哪款芯片,或者哪一类呢
@yuzukitsuru
我看了那个文档,不过估计是没有完全理解。
类似这种,默认定义了0~7号pwm
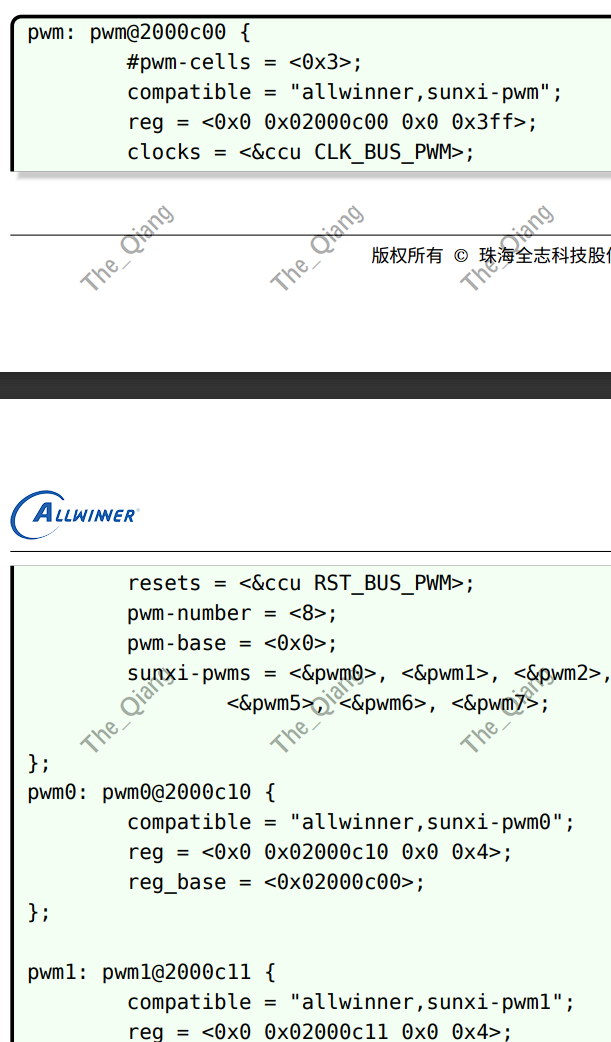
然后在板级dts里只配置了pwm0 pwm2 pwm7
其他的写都没写。看样子是要自己添加。但是没有看到介绍如何添加。 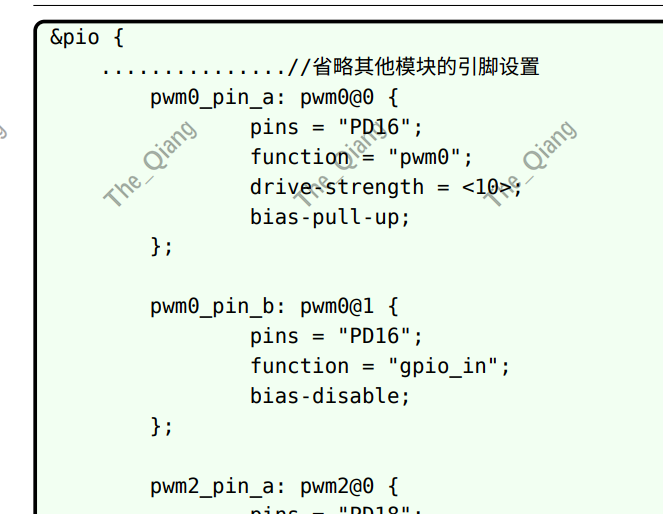
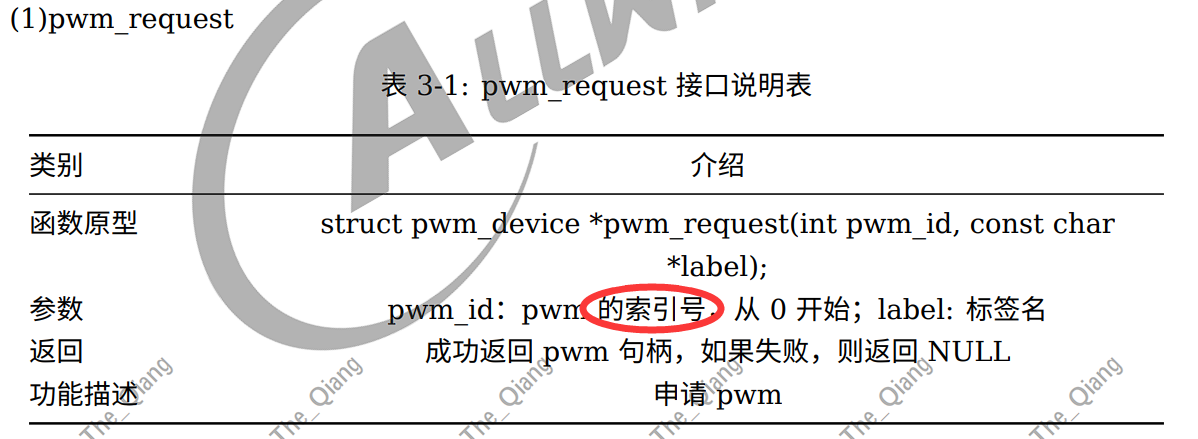
然后,提供的内核api需要 pwm号, 返回的错误信息在前面(和/sys/class/pwm下的信息一样)
@yuzukitsuru 好像是的。pwm0、pwm2、pwm7,在board.dts里面配置了休眠和常规两种状态,然后也是默认启用的。
不过我自己添加的pwm1,也是这种情况。
刚刚用gpio_direction_output()和usleep模拟PWM。。不过只能控制舵机0°~160°左右,达不到180°。不知道为什么。。还在摸索
我尝试使用字符驱动和/sys/class/pwm/pwmchip0/export 启用pwm,驱动和用户层操作都是类似下面这种错误pinctrl_get failed
[ 868.035098] platform 2000c17.pwm7: pinctrl_get failed
这是/sys/class下的pwm7(pwm1也是如此)
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# ls
capture output_type power
duty_cycle period uevent
enable polarity waiting_for_supplier
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# echo 2000000 >period
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# echo 1000000 >duty_cycle
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# echo normal >polarity
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# echo 1 > enable
[ 868.035098] platform 2000c17.pwm7: pinctrl_get failed
ash: write error: No such device
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# cat capture
[ 885.724275] platform 2000c17.pwm7: pinctrl_get failed
[ 885.730046] time out is 1000
[ 894.621166] platform 2000c17.pwm7: pinctrl_get failed
[ 894.627001] sunxi_pwm_capture: pwm capture timeout !
[ 894.632728] platform 2000c17.pwm7: pinctrl_get failed
[ 894.638491] time out is 1000
[ 903.529004] platform 2000c17.pwm7: pinctrl_get failed
[ 903.534865] sunxi_pwm_capture: pwm capture timeout !
cat: read error: Operation not permitted
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7# cat /sys/kernel/debug/pwm
platform/2000c00.pwm, 8 PWM devices
pwm-0 (vdd-cpu ): requested period: 0 ns duty: 0 ns polarity: inverse
pwm-1 (sysfs ): requested period: 2000000 ns duty: 0 ns polarity: inverse
pwm-2 (lcd ): requested enabled period: 1000000 ns duty: 390625 ns polarity: normal
pwm-3 ((null) ): period: 0 ns duty: 0 ns polarity: inverse
pwm-4 ((null) ): period: 0 ns duty: 0 ns polarity: inverse
pwm-5 ((null) ): period: 0 ns duty: 0 ns polarity: inverse
pwm-6 ((null) ): period: 0 ns duty: 0 ns polarity: inverse
pwm-7 (sysfs ): requested period: 2000000 ns duty: 1000000 ns polarity: normal
root@TinaLinux:/sys/devices/platform/soc@3000000/2000c00.pwm/pwm/pwmchip0/pwm7#
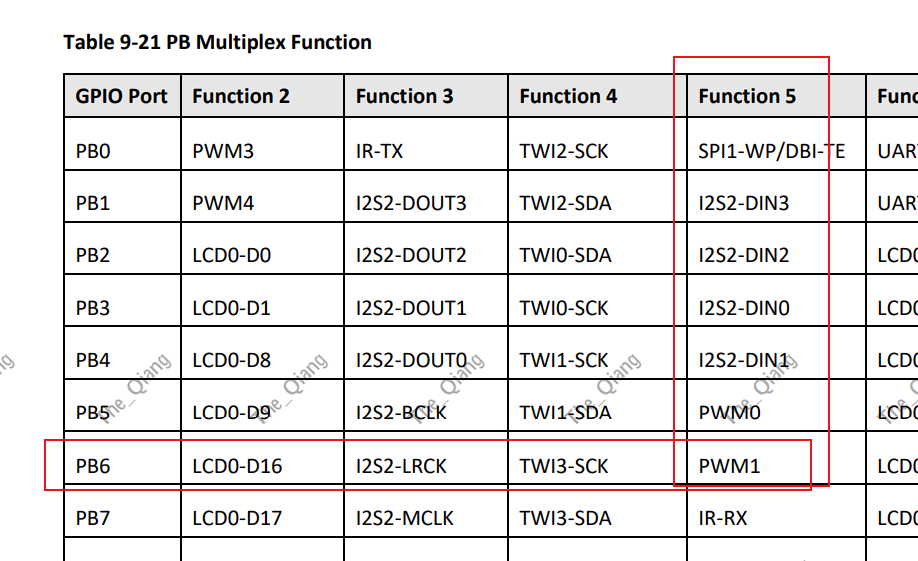
下面是修改过的设备树
pwm1_pin_a: pwm1@0 {
pins = "PB6";
// allwinner,muxsel = <5>;//这个地方尝试过,也是pinctrl_get failed
function = "pwm1";
drive-strength = <10>;
bias-pull-up;
};
pwm1_pin_b: pwm1@1 {
pins = "PB6";
function = "gpio_in";
};
&pwm1 {
pinctrl-names = "active", "sleep";
pinctrl-0 = <&pwm1_pin_a>;
pinctrl-1 = <&pwm1_pin_b>;
status = "okay";
};
我还把设备树中PB6相关的其他设备都“disable”了(TWI3和daudio2)(i2s2的我没找到 )结果和上面相同
)结果和上面相同
allwinner,muxsel = <5>;我试着加在了pwm1_pin_a: pwm1@0 {} 里,也没效果
@yuzukitsuru 就是说这个gpio_direction_output()的响应速度不能满足dht11这类对时序要求高的传感器嘛?
方便一点的办法是使用I2C设备来传嘛
@yuzukitsuru 大佬,我再问俩问题,
像gpio_direction_output()这一类gpio操作的函数,延迟是什么级别的 能达到<5us嘛
不修改设备树的情况下,单字符驱动,不用虚拟总线,直接使gpio_request()可以达到操作dht11,ds18b20之类的要求吗
@yuzukitsuru 在 【萌新入门】如何编写一个应用程序,调用Tina Linux提供的GPIO驱动,实现某个GPIO脚的电平周期反转 中说:
@the_qiang D1是RISCV,与ARM的不太一样,没有先删了看看能不能编译过,能就没问题
编号计算:全志引脚计算器 AllwinnerPin 小工具发布
https://bbs.aw-ol.com/topic/1166/share/1
感谢大佬,是我向太复杂了,真就是你另一个标题里的PC1 = ('C'-'A')*32+1
@yuzukitsuru 在 【萌新入门】如何编写一个应用程序,调用Tina Linux提供的GPIO驱动,实现某个GPIO脚的电平周期反转 中说:
@lgkgkfg 是,在内核控制更方便些,不过一些高速操作都使用高速外设了
我也请教一下
tina SDK关于GPIO的参考文档里给出的介绍
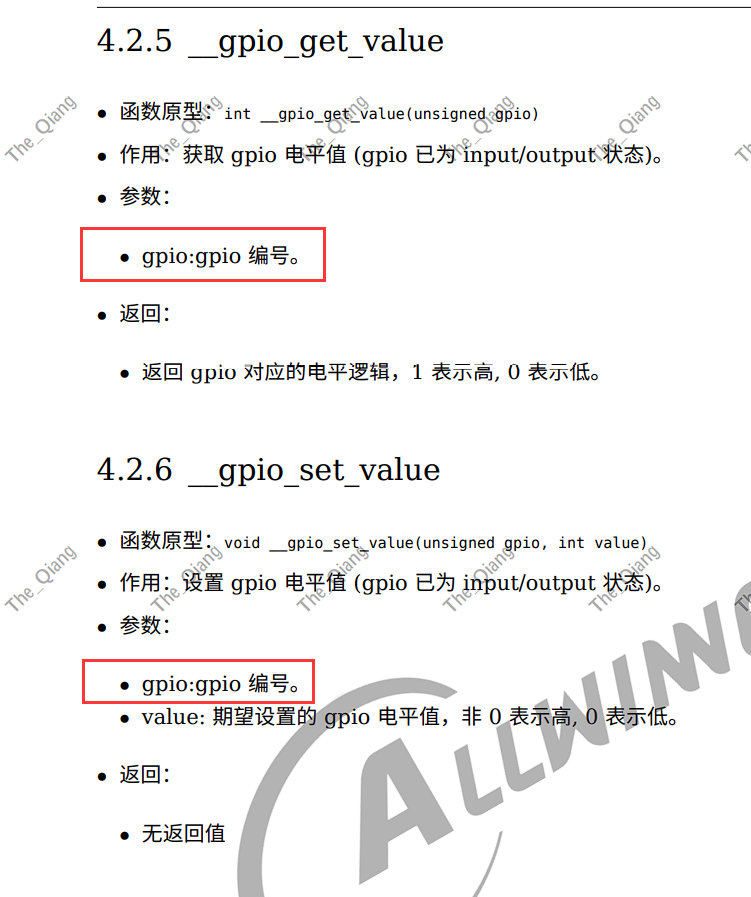
如图,上面的这个gpio编号如何计算。例如PC1口。
另外我编译ko文件时没有这个<mach/gpio.h>(抄的V853的led驱动头文件引用)