【全志T113-S3_100ask】2-编写第一个驱动
-
(1)开发环境
windows开发环境:VsCode
linux 开发环境:Ubuntu 18.04 环境参考1、指定交叉编译
在buildroot 目录下发现两个 arm-linux-gnueabi-gcc
root@znh-ubuntu:/disk/buildroot-100ask_t113-pro/buildroot# find ./* -name "*gnueabi-gcc" ./output/host/opt/ext-toolchain/bin/arm-linux-gnueabi-gcc ./output/host/bin/arm-linux-gnueabi-gcc但 ./output/host/bin/arm-linux-gnueabi-gcc 是链接过去的
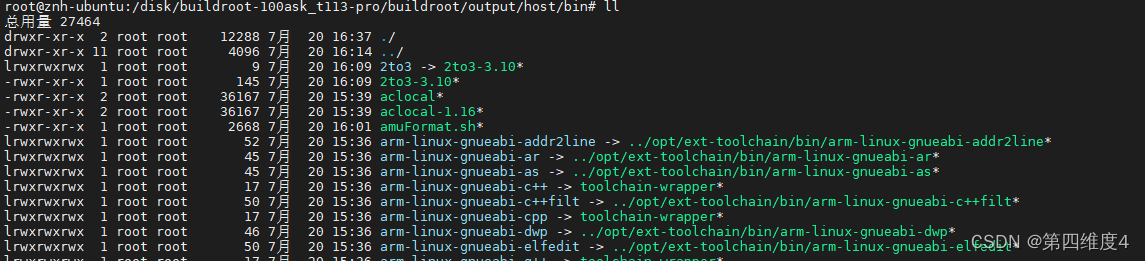
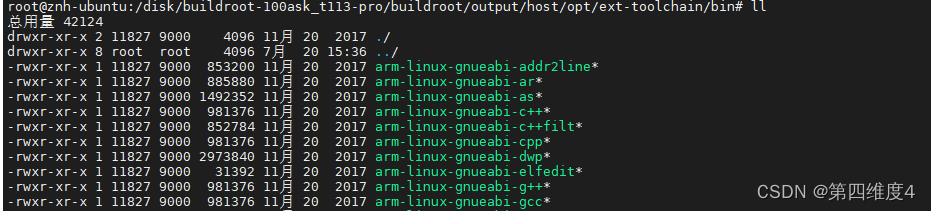
./output/host/opt/ext-toolchain/bin/arm-linux-gnueabi-gcc 是原始的
在这里我使用链接后的gcc
加载环境变量:export PATH=$PATH:/disk/buildroot-100ask_t113-pro/buildroot/output/host/bin export ARCH=arm export CROSS_COMPILE=arm-linux-gnueabi-root@znh-ubuntu:~# export PATH=$PATH:/disk/buildroot-100ask_t113-pro/buildroot/output/host/bin root@znh-ubuntu:~# export ARCH=arm root@znh-ubuntu:~# export CROSS_COMPILE=arm-linux-gnueabi- root@znh-ubuntu:~# root@znh-ubuntu:~# arm-linux-gnueabi-gcc -v 使用内建 specs。 COLLECT_GCC=arm-linux-gnueabi-gcc COLLECT_LTO_WRAPPER=/disk/t113GitHub/eLinuxCore_100ask-t113-pro/toolchain/gcc-linaro-7.2.1-2017.11-x86_64_arm-linux-gnueabi/bin/../libexec/gcc/arm-linux-gnueabi/7.2.1/lto-wrapper 目标:arm-linux-gnueabi 配置为:'/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/snapshots/gcc.git~linaro-7.2-2017.11/configure' SHELL=/bin/bash --with-mpc=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/builds/destdir/x86_64-unknown-linux-gnu --with-mpfr=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/builds/destdir/x86_64-unknown-linux-gnu --with-gmp=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/builds/destdir/x86_64-unknown-linux-gnu --with-gnu-as --with-gnu-ld --disable-libmudflap --enable-lto --enable-shared --without-included-gettext --enable-nls --disable-sjlj-exceptions --enable-gnu-unique-object --enable-linker-build-id --disable-libstdcxx-pch --enable-c99 --enable-clocale=gnu --enable-libstdcxx-debug --enable-long-long --with-cloog=no --with-ppl=no --with-isl=no --disable-multilib --with-float=soft --with-mode=thumb --with-tune=cortex-a9 --with-arch=armv7-a --enable-threads=posix --enable-multiarch --enable-libstdcxx-time=yes --enable-gnu-indirect-function --with-build-sysroot=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/sysroots/arm-linux-gnueabi --with-sysroot=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/builds/destdir/x86_64-unknown-linux-gnu/arm-linux-gnueabi/libc --enable-checking=release --disable-bootstrap --enable-languages=c,c++,fortran,lto --build=x86_64-unknown-linux-gnu --host=x86_64-unknown-linux-gnu --target=arm-linux-gnueabi --prefix=/home/tcwg-buildslave/workspace/tcwg-make-release/builder_arch/amd64/label/tcwg-x86_64-build/target/arm-linux-gnueabi/_build/builds/destdir/x86_64-unknown-linux-gnu 线程模型:posix gcc 版本 7.2.1 20171011 (Linaro GCC 7.2-2017.11)不想每次否加载可以写在自启动脚本
vim ~/.bashrc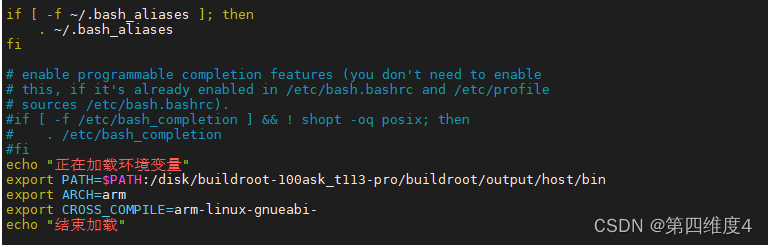
##(2)编写驱动
1、编写 helloword驱动 hello_drv.c
#include <linux/module.h> #include <linux/fs.h> #include <linux/errno.h> #include <linux/miscdevice.h> #include <linux/kernel.h> #include <linux/major.h> #include <linux/mutex.h> #include <linux/proc_fs.h> #include <linux/seq_file.h> #include <linux/stat.h> #include <linux/init.h> #include <linux/device.h> #include <linux/tty.h> #include <linux/kmod.h> #include <linux/gfp.h> /* 1. 确定主设备号 */ static int major = 0; static char kernel_buf[1024]; static struct class *hello_class; #define MIN(a, b) (a < b ? a : b) /* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */ static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset) { int err; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); err = copy_to_user(buf, kernel_buf, MIN(1024, size)); return MIN(1024, size); } static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset) { int err; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); err = copy_from_user(kernel_buf, buf, MIN(1024, size)); return MIN(1024, size); } static int hello_drv_open (struct inode *node, struct file *file) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); return 0; } static int hello_drv_close (struct inode *node, struct file *file) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); return 0; } /* 2. 定义自己的file_operations结构体 */ static struct file_operations hello_drv = { .owner = THIS_MODULE, .open = hello_drv_open, .read = hello_drv_read, .write = hello_drv_write, .release = hello_drv_close, }; /* 4. 把file_operations结构体告诉内核:注册驱动程序 */ /* 5. 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数 */ static int __init hello_init(void) { int err; printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); major = register_chrdev(0, "hello", &hello_drv); /* /dev/hello */ hello_class = class_create(THIS_MODULE, "hello_class"); err = PTR_ERR(hello_class); if (IS_ERR(hello_class)) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); unregister_chrdev(major, "hello"); return -1; } device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"); /* /dev/hello */ return 0; } /* 6. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数 */ static void __exit hello_exit(void) { printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__); device_destroy(hello_class, MKDEV(major, 0)); class_destroy(hello_class); unregister_chrdev(major, "hello"); } /* 7. 其他完善:提供设备信息,自动创建设备节点 */ module_init(hello_init); module_exit(hello_exit); MODULE_LICENSE("GPL");2、编写测试驱动文件 hello_drv_test.c
#include <sys/types.h> #include <sys/stat.h> #include <fcntl.h> #include <unistd.h> #include <stdio.h> #include <string.h> /* * ./hello_drv_test -w abc * ./hello_drv_test -r */ int main(int argc, char **argv) { int fd; char buf[1024]; int len; /* 1. 判断参数 */ if (argc < 2) { printf("Usage: %s -w <string>\n", argv[0]); printf(" %s -r\n", argv[0]); return -1; } /* 2. 打开文件 */ fd = open("/dev/hello", O_RDWR); if (fd == -1) { printf("can not open file /dev/hello\n"); return -1; } /* 3. 写文件或读文件 */ if ((0 == strcmp(argv[1], "-w")) && (argc == 3)) { len = strlen(argv[2]) + 1; len = len < 1024 ? len : 1024; write(fd, argv[2], len); } else { len = read(fd, buf, 1024); buf[1023] = '\0'; printf("APP read : %s\n", buf); } close(fd); return 0; }3、编写Makefile
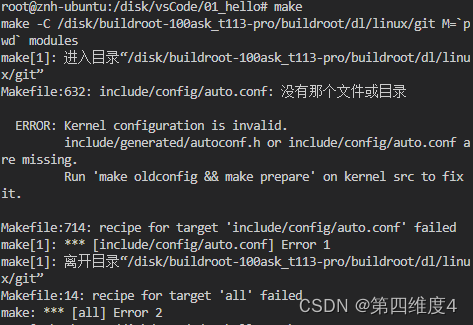
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR # 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量: # 2.1 ARCH, 比如: export ARCH=arm64 # 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu- # 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin # 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同, # 请参考各开发板的高级用户使用手册 KERN_DIR = /disk/buildroot-100ask_t113-pro/buildroot/output/build/linux-d96275805a67d54998123d36e59108cb1ed52ad5 all: make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o hello_drv_test hello_drv_test.c clean: make -C $(KERN_DIR) M=`pwd` modules clean rm -rf modules.order rm -f hello_drv_test obj-m += hello_drv.o关于 KERN_DIR ,本环境使用的是 buildroot ,通过GitHub把kernel下载下来的,源码在./buildroot-100ask_t113-pro/buildroot/dl/linux/git 下,但是该源码未经过编译,而上一节已经编译过 buildroot 生成镜像img了,那就是已经编译过了,但是指定该目录编译不了
真正的编译目录在
./buildroot-100ask_t113-pro/buildroot/output/build/linux-d96275805a67d54998123d36e59108cb1ed52ad5
(我不确实后面的字母数字是不是每个人一样)
(3)测试
将生成的 hello_drv.ko、hello_drv_test 放到开发板上
在这里使用 tftp 下载。(TFTP的搭建参考:链接)
但第一次使用系统没有连接网络(现在已经插入网线)# ifconfig lo Link encap:Local Loopback inet addr:127.0.0.1 Mask:255.0.0.0 inet6 addr: ::1/128 Scope:Host UP LOOPBACK RUNNING MTU:65536 Metric:1 RX packets:6 errors:0 dropped:0 overruns:0 frame:0 TX packets:6 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:603 (603.0 B) TX bytes:603 (603.0 B)1、使用udhcpc 自动联网
# udhcpc udhcpc: started, v1.35.0 [ 3538.458305] libphy: 4500000.eth: probed [ 3538.462913] sunxi-gmac 4500000.eth eth0: eth0: Type(7) PHY ID 001cc816 at 0 IRQ poll (4500000.eth-0:00) udhcpc: broadcasting discover [ 3541.673890] sunxi-gmac 4500000.eth eth0: Link is Up - 100Mbps/Full - flow control off [ 3541.682714] IPv6: ADDRCONF(NETDEV_CHANGE): eth0: link becomes ready udhcpc: broadcasting discover udhcpc: broadcasting select for 192.168.3.45, server 192.168.3.1 udhcpc: lease of 192.168.3.45 obtained from 192.168.3.1, lease time 604800 deleting routers adding dns 192.168.3.12、通过 tftp 下载资源
# tftp -g -r hello_drv.ko 192.168.3.44 # tftp -g -r hello_drv_test 192.168.3.44 # # ls hello_drv.ko hello_drv_test3、测试驱动
(1)加载驱动
# insmod hello_drv.ko [ 3860.564181] hello_drv: loading out-of-tree module taints kernel. [ 3860.571552] /disk/vsCode/01_hello/hello_drv.c hello_init line 70 (2)查看驱动是否加载 # ls /dev/hello* /dev/hello # lsmod Module Size Used by Tainted: G hello_drv 16384 0 (3)添加权限 # chmod 777 ./hello_drv_test (4)向驱动写入数据 # ./hello_drv_test -w abc [ 3906.061995] /disk/vsCode/01_hello/hello_drv.c hello_drv_open line 45 [ 3906.069274] /disk/vsCode/01_hello/hello_drv.c hello_drv_write line 38 [ 3906.076579] /disk/vsCode/01_hello/hello_drv.c hello_drv_close line 51 (5)读取驱动数据 # ./hello_drv_test -r [ 3913.268282] /disk/vsCode/01_hello/hello_drv.c hello_drv_open line 45 [ 3913.275535] /disk/vsCode/01_hello/hello_drv.c hello_drv_read line 30 APP read : abc [ 3913.283024] /disk/vsCode/01_hello/hello_drv.c hello_drv_close line 51 (6)卸载驱动 # rmmod hello_drv [ 4304.419170] /disk/vsCode/01_hello/hello_drv.c hello_exit line 90 # lsmod Module Size Used by Tainted: G sunxi_ce 57344 0原文链接:https://blog.csdn.net/qq_46079439/article/details/125897482
Copyright © 2024 深圳全志在线有限公司 粤ICP备2021084185号 粤公网安备44030502007680号