#
# Architecture Options
#
# CONFIG_ARCH_ARM is not set
CONFIG_ARCH_RISCV=y
CONFIG_ARCH_START_ADDRESS=0x42300000
CONFIG_ARCH_MEM_LENGTH=0x600000
CONFIG_LITTLE_ENDIAN=y
CONFIG_BITS_PER_LONG=64
# CONFIG_CACHE_ALIGN_CHECK is not set
CONFIG_TOOLCHAIN_FLOAT_HARD=y
CONFIG_PANIC_CLI=y
CONFIG_PANIC_CLI_PWD=y
CONFIG_IMG_VERSION_MESSAGE=y
ping@embedall:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$ m
build rtos ...
===There isn't tina environment.===
Note: will use shell command origin rather than the functon.
Dark Builder
Version (1.6.0 - BiCEP2 (Gravitational Waves))
*[CC] [SCRIPT] build/t113_s4_c906_evb1_auto/img/sys_config.fex
[LDS] [Linker] projects/t113_s4_c906/evb1_auto/freertos.lds
CC build/t113_s4_c906_evb1_auto/arch/common/common.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/common/exception.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/common/clocksource.o
AS build/t113_s4_c906_evb1_auto/arch/common/sys_config.o
CC build/t113_s4_c906_evb1_auto/arch/common/version.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/sun8iw20p1/sun8i.o
AS build/t113_s4_c906_evb1_auto/arch/risc-v/c906/head_s.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/plic.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/cache.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/spinlock.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/clic.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/platform/platform_sun8iw20.o
CC build/t113_s4_c906_evb1_auto/arch/risc-v/c906/interrupt.o
CC build/t113_s4_c906_evb1_auto/components/thirdparty/console/FreeRTOS_CLI.o
CC build/t113_s4_c906_evb1_auto/components/common/thirdparty/md5/md5.o
……
LD build/t113_s4_c906_evb1_auto/components/common/thirdparty/openamp/open-amp/obj-in.o
LD build/t113_s4_c906_evb1_auto/components/common/thirdparty/openamp/obj-in.o
LD build/t113_s4_c906_evb1_auto/components/common/thirdparty/obj-in.o
LD build/t113_s4_c906_evb1_auto/components/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/rtos-hal/hal/source/ccmu/sunxi-ng/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/rtos-hal/hal/source/ccmu/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/rtos-hal/hal/source/twi/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/rtos-hal/hal/source/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/rtos-hal/hal/obj-in.o
LD build/t113_s4_c906_evb1_auto/drivers/obj-in.o
LD build/t113_s4_c906_evb1_auto/kernel/FreeRTOS-orig/obj-in.o
LD build/t113_s4_c906_evb1_auto/kernel/obj-in.o
[LD] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.elf
if [ -n /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/ ]; then mkdir -p /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img; fi
Memory region Used Size Region Size %age Used
RAM: 214096 B 6 MB 3.40%
*[IMAGE] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.bin
*[SYMS] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.syms
text data bss dec hex filename
134576 69048 10472 214096 34450 build/t113_s4_c906_evb1_auto/img/rt_system.elf
copying /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin to /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/freertos.fex
#### make completed successfully
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/rtos_riscv_sun8iw20p1.f
last=t113_s4_c906_evb1_auto
You're building on Linux
Lunch menu... pick a combo:
1. t113_i_c906_evb1_auto
2. t113_s3p_c906_evb1_auto
3. t113_s3p_c906_evb1_auto_fastboot
4. t113_s3p_c906_evb1_auto_fastboot_video
5. t113_s3p_c906_evb1_auto_non_os
6. t113_s3p_c906_example_demo
7. t113_s4_c906_evb1_auto
8. t113_s4_c906_evb1_auto_fastboot_video
9. t113_s4p_c906_evb1_auto
Which would you like? [Default t113_s4_c906_evb1_auto]:
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$ lunch_rtos
last=t113_s4_c906_evb1_auto
You're building on Linux
Lunch menu... pick a combo:
1. t113_i_c906_evb1_auto
2. t113_s3p_c906_evb1_auto
3. t113_s3p_c906_evb1_auto_fastboot
4. t113_s3p_c906_evb1_auto_fastboot_video
5. t113_s3p_c906_evb1_auto_non_os
6. t113_s3p_c906_example_demo
7. t113_s4_c906_evb1_auto
8. t113_s4_c906_evb1_auto_fastboot_video
9. t113_s4p_c906_evb1_auto
Which would you like? [Default t113_s4_c906_evb1_auto]: 7
select=7...
t113_s4_c906/evb1_auto
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/projects/t113_s4_c906/evb1_auto/defconfig' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/.config'
============================================
RTOS_BUILD_TOP=/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos
RTOS_TARGET_ARCH=riscv
RTOS_TARGET_CHIP=sun8iw20p1
RTOS_TARGET_DEVICE=t113_s4_c906
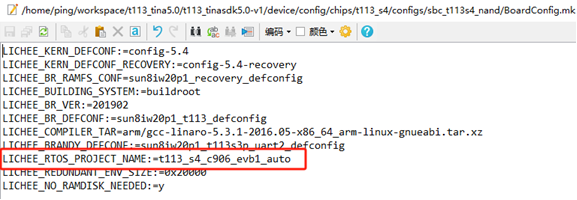
RTOS_PROJECT_NAME=t113_s4_c906_evb1_auto
============================================
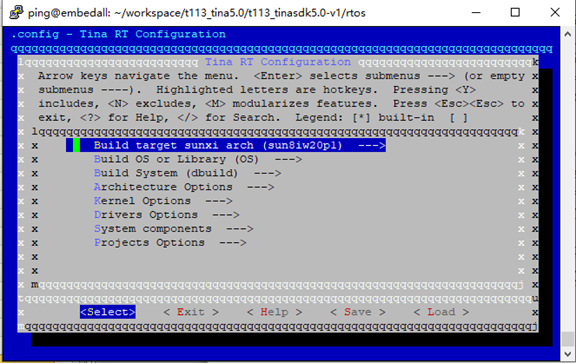
Run mrtos_menuconfig to config rtos
Run m or mrtos to build rtos
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$ mrtos
build rtos ...
===There isn't tina environment.===
Note: will use shell command origin rather than the functon.
Dark Builder
Version (1.6.0 - BiCEP2 (Gravitational Waves))
*[CC] [SCRIPT] build/t113_s4_c906_evb1_auto/img/sys_config.fex
[CONF] [Tina-RT-Builder] .dbuild/..//include/generated/t113_s4_c906_evb1_aut o/autoconf.h
[LDS] [Linker] projects/t113_s4_c906/evb1_auto/freertos.lds
CC build/t113_s4_c906_evb1_auto/arch/common/version.o
LD build/t113_s4_c906_evb1_auto/arch/common/obj-in.o
LD build/t113_s4_c906_evb1_auto/arch/obj-in.o
[LD] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.elf
if [ -n /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/bu ild/t113_s4_c906_evb1_auto/img/ ]; then mkdir -p /home/ping/workspace/t113_tina 5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img; fi
Memory region Used Size Region Size %age Used
RAM: 214096 B 6 MB 3.40%
*[SYMS] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.syms
*[IMAGE] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.bin
text data bss dec hex filename
134576 69048 10472 214096 34450 build/t113_s4_c906_evb1_auto/img/rt_syst em.elf
copying /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/bu ild/t113_s4_c906_evb1_auto/img/rt_system.bin to /home/ping/workspace/t113_tina5. 0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/freertos.fex
#### make completed successfully
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t11 3_s4_c906_evb1_auto/img/rt_system.bin' -> '/home/ping/workspace/t113_tina5.0/t11 3_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/rtos_riscv_sun8iw20p1.fex'
ping@embedall:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos$
xxx@xxx:~/workspace/t113_tina5.0/t113_tinasdk5.0-v1$ make -j32
===There is tina environment.===
Note: make is the shell functon in envsetup.sh.
== action: openwrt_build, action_args: -j32 ==
========ACTION List: build_rtos ;========
options :
INFO: build rtos ...
Setup env done!
Run lunch_rtos to select project
last=t113_s4_c906_evb1_auto
select=t113_s4_c906_evb1_auto...
t113_s4_c906/evb1_auto
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/projects/t113_s4_c906/evb1_auto/defconfig' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/.config'
============================================
RTOS_BUILD_TOP=/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos
RTOS_TARGET_ARCH=riscv
RTOS_TARGET_CHIP=sun8iw20p1
RTOS_TARGET_DEVICE=t113_s4_c906
RTOS_PROJECT_NAME=t113_s4_c906_evb1_auto
============================================
Run mrtos_menuconfig to config rtos
Run m or mrtos to build rtos
build rtos ...
Dark Builder
Version (1.6.0 - BiCEP2 (Gravitational Waves))
*[CC] [SCRIPT] build/t113_s4_c906_evb1_auto/img/sys_config.fex
[CONF] [Tina-RT-Builder] .dbuild/..//include/generated/t113_s4_c906_evb1_auto/autoconf.h
[LDS] [Linker] projects/t113_s4_c906/evb1_auto/freertos.lds
CC build/t113_s4_c906_evb1_auto/arch/common/version.o
LD build/t113_s4_c906_evb1_auto/arch/common/obj-in.o
LD build/t113_s4_c906_evb1_auto/arch/obj-in.o
[LD] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.elf
if [ -n /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/ ]; then mkdir -p /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img; fi
Memory region Used Size Region Size %age Used
RAM: 214096 B 6 MB 3.40%
*[IMAGE] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.bin
*[SYMS] [Tina-RT-Builder] build/t113_s4_c906_evb1_auto/img/rt_system.syms
text data bss dec hex filename
134576 69048 10472 214096 34450 build/t113_s4_c906_evb1_auto/img/rt_system.elf
copying /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin to /home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/freertos.fex
#### make completed successfully
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.bin' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/board/t113_s4_c906/evb1_auto/bin/rtos_riscv_sun8iw20p1.fex'
'/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/rtos/lichee/rtos/build/t113_s4_c906_evb1_auto/img/rt_system.elf' -> '/home/ping/workspace/t113_tina5.0/t113_tinasdk5.0-v1/device/config/chips/t113_s4/configs/sbc_t113s4_nand/bin/amp_rv0.bin'
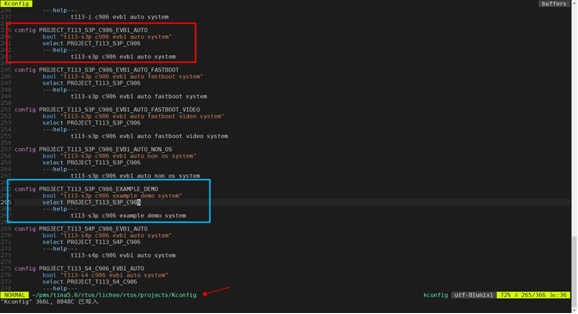
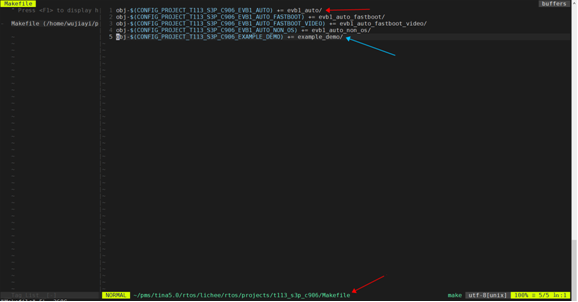
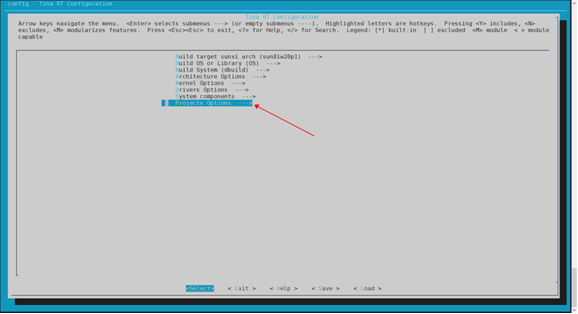
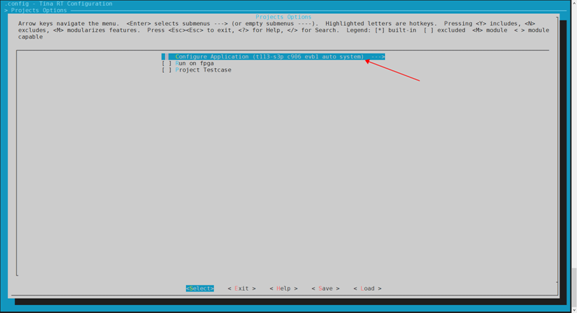
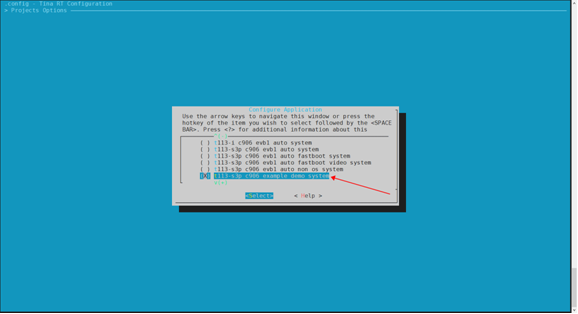
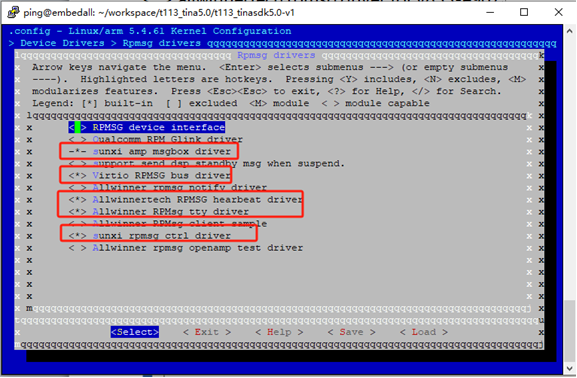
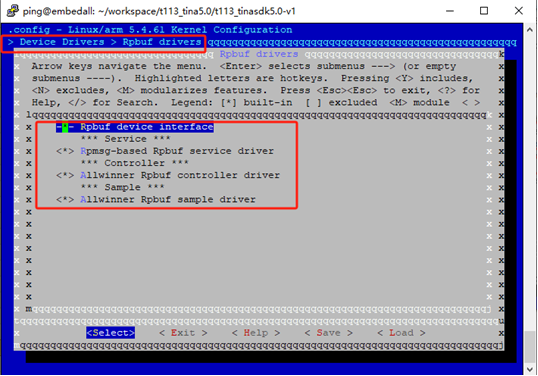
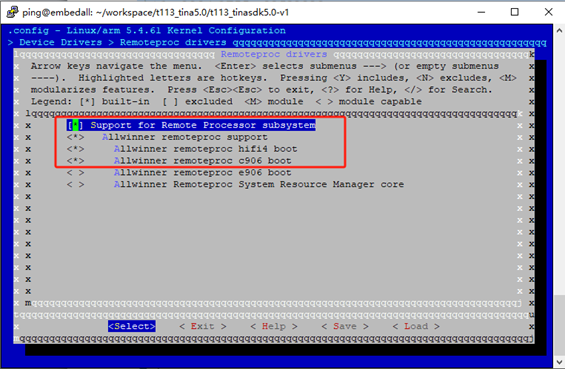
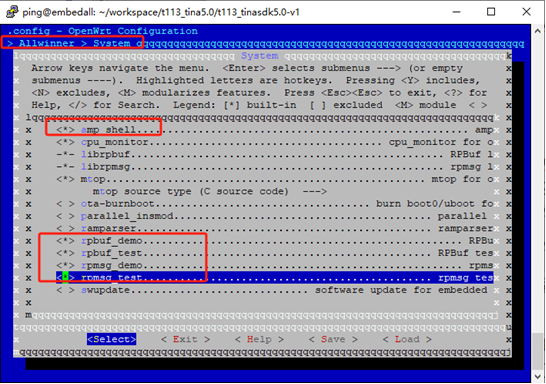
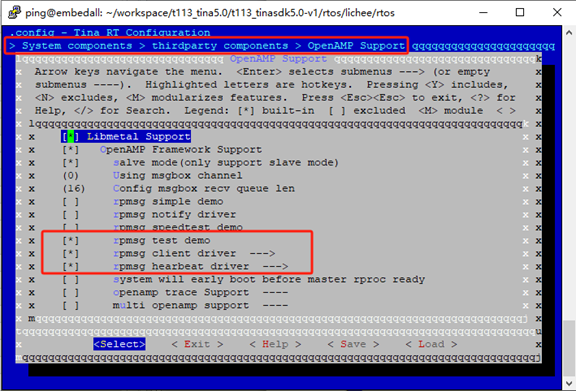
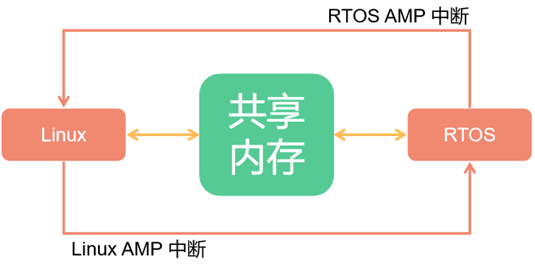
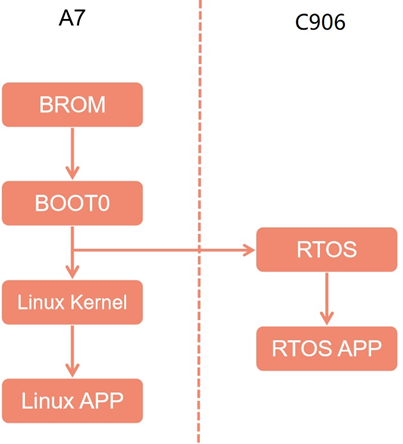
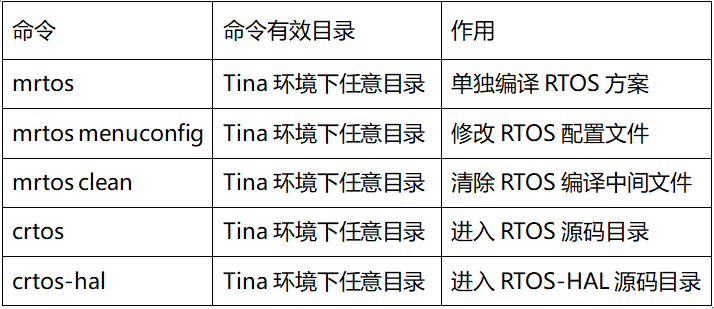
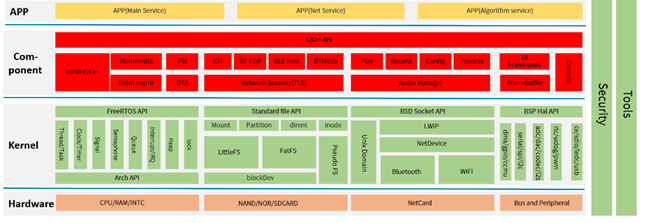
全志Tina Linux SDK中包含了RTOS系统,该系统是基于FreeRTOS内核的软件开发包,包含了系统开发用到的内核源码、驱动、工具、组件与应用程序包。通过Makefile脚本和Kconfig配置文件,使得用户可以通过menuconfig进行个性化裁减,编译出一个可以直接烧写到机器上运行的RTOS系统软件。
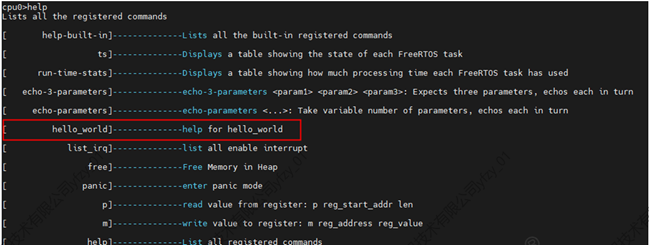
root@TinaLinux:/dev# trecorderdemo --help
****************************************************************************
* This program shows how to test trecorder
****************************************************************************
****************************************************************************
* trecorderdemo 0: front channel recorder test
* trecorderdemo 1: rear channel recorder test
* trecorderdemo 2: front and rear two channel recorder test
* trecorderdemo audio X: audio X recording test(X = 0/1)
***************************************************************************
root@TinaLinux:/dev# trecorderdemo --help
****************************************************************************
* This program shows how to test trecorder
****************************************************************************
****************************************************************************
* trecorderdemo 0: front channel recorder test
* trecorderdemo 1: rear channel recorder test
* trecorderdemo 2: front and rear two channel recorder test
* trecorderdemo audio X: audio X recording test(X = 0/1)
***************************************************************************
root@TinaLinux:/dev# trecorderdemo --help
****************************************************************************
* This program shows how to test trecorder
****************************************************************************
****************************************************************************
* trecorderdemo 0: front channel recorder test
* trecorderdemo 1: rear channel recorder test
* trecorderdemo 2: front and rear two channel recorder test
* trecorderdemo audio X: audio X recording test(X = 0/1)
***************************************************************************
root@TinaLinux:/dev# trecorderdemo --help
****************************************************************************
* This program shows how to test trecorder
****************************************************************************
****************************************************************************
* trecorderdemo 0: front channel recorder test
* trecorderdemo 1: rear channel recorder test
* trecorderdemo 2: front and rear two channel recorder test
* trecorderdemo audio X: audio X recording test(X = 0/1)
***************************************************************************
root@TinaLinux:/dev# trecorderdemo --help
****************************************************************************
* This program shows how to test trecorder
****************************************************************************
****************************************************************************
* trecorderdemo 0: front channel recorder test
* trecorderdemo 1: rear channel recorder test
* trecorderdemo 2: front and rear two channel recorder test
* trecorderdemo audio X: audio X recording test(X = 0/1)
root@TinaLinux:/dev# camerademo --help
[CAMERA]**********************************************************
[CAMERA]* *
[CAMERA]* this is camera test. *
[CAMERA]* *
[CAMERA]**********************************************************
[CAMERA]******************** camerademo help *********************
[CAMERA] This program is a test camera.
[CAMERA] It will query the sensor to support the resolution, output format and test frame rate.
[CAMERA] At the same time you can modify the data to save the path and get the number of photos.
[CAMERA] When the last parameter is debug, the output will be more detailed information
[CAMERA] There are eight ways to run:
[CAMERA] 1.camerademo --- use the default parameters.
[CAMERA] 2.camerademo debug --- use the default parameters and output debug information.
[CAMERA] 3.camerademo setting --- can choose the resolution and data format.
[CAMERA] 4.camerademo setting debug --- setting and output debug information.
[CAMERA] 5.camerademo NV21 640 480 30 bmp /tmp 5 --- param input mode,can save bmp or yuv.
[CAMERA] 6.camerademo NV21 640 480 30 bmp /tmp 5 debug --- output debug information.
[CAMERA] 7.camerademo NV21 640 480 30 bmp /tmp 5 Num --- /dev/videoNumparam input mode,can save bmp or yuv.
[CAMERA] 8.camerademo NV21 640 480 30 bmp /tmp 5 Num debug --- /dev/videoNum output debug information.
[CAMERA] 8.camerademo NV21 640 480 30 bmp /tmp 5 Num 1 --- 1/2: chose memory: V4L2_MEMORY_MMAP/USERPTR
[CAMERA]**********************************************************
root@TinaLinux:/dev#
root@TinaLinux:/dev# camerademo debug
[CAMERA]**********************************************************
[CAMERA]* *
[CAMERA]* this is camera test. *
[CAMERA]* *
[CAMERA]**********************************************************
[CAMERA]**********************************************************
[CAMERA] open /dev/video0!
[CAMERA]**********************************************************
[CAMERA_DEBUG] Querey device capabilities succeed
[CAMERA_DEBUG] cap.driver=sunxi-tvd
[CAMERA_DEBUG] cap.card=sunxi-tvd
[CAMERA_DEBUG] cap.bus_info=tvd_v4l2_dev0
[CAMERA_DEBUG] cap.version=0x00010000
[CAMERA_DEBUG] cap.capabilities=0x85200001
[CAMERA]**********************************************************
[CAMERA] The path to data saving is /tmp.
[CAMERA] The number of captured photos is 5.
[CAMERA] save bmp format
[CAMERA_DEBUG]**********************************************************
[CAMERA_DEBUG] enumerate image formats
[CAMERA_DEBUG] format index = 0, name = NV12
[CAMERA_DEBUG] format index = 1, name = NV21
[CAMERA_DEBUG] format index = 2, name = NV16
[CAMERA_DEBUG] format index = 3, name = NV61
[CAMERA_DEBUG]*********************************************************
[CAMERA_DEBUG] The sensor supports the following formats :
[CAMERA_DEBUG] Index 0 : NV12.
[CAMERA_DEBUG] Index 1 : NV21.
[CAMERA_DEBUG] Index 2 : NV16.
[CAMERA_DEBUG] Index 3 : NV61.
[ 69.731859] [tvd] vidioc_s_fmt_vid_cap:1623
[ 69.731859] interface=0
[ 69.731859] system=NTSC
[ 69.731859] format=0
[ 69.731859] output_fmt=YUV420
[CAMERA_DEBUG]**********************************************************
[CAMERA_DEBUG] The NV12 supports the following resolut[ 69.750104] [tvd] vidioc_s_fmt_vid_cap:1627
[ 69.750104] row=1
[ 69.750104] column=1
[ 69.750104] ch[0]=0
[ 69.750104] ch[1]=0
[ 69.750104] ch[2]=0
[ 69.750104] ch[3]=0
ions:
[CAMERA_DEBUG] Index 0 : 720 * 480
[CAMERA_DEBUG] Index 1 : 720 * 576
[CAMERA_DEBUG]***********************************[ 69.779945] [tvd] vidioc_s_fmt_vid_cap:1629
[ 69.779945] width=720
[ 69.779945] height=480
[ 69.779945] dev->sel=0
***********************
[CAMERA_DEBUG] The NV21 supports the following resolutions:
[CAMERA_DEBUG] Index 0 : 720 * 480
[CAMER[ 69.803870] [tvd] tvd_cagc_and_3d_config:1481 tvd0 agc auto mode
A_DEBUG] Index 1 : 720 * 576
[CAMERA_DEBUG]**********************************************************
[CAMERA_DEBUG] The NV16 [ 69.821636] [tvd] tvd_cagc_and_3d_config:1490 tvd0 CAGC enable:0x1
supports the following resolutions:
[CAMERA_DEBUG] Index 0 : 720 * 480
[CAMERA_DEBUG] Index 1 : 720 * 576
[CAMERA_DEBUG]*****[ 69.843758] [tvd] tvd_cagc_and_3d_config:1517 tvd0 3d enable :0x4f900000
*****************************************************
[CAMERA_DEBUG] The NV61 supports the following resolutions:
[CAMERA_DEBU[ 69.860018] [tvd] vidioc_streamon:1712 Out vidioc_streamon:0
G] Index 0 : 720 * 480
[CAMERA_DEBUG] Index 1 : 720 * 576
[CAMERA]**********************************************************
[CAMERA] Using format parameters NV21.
[CAMERA_ERR] sensor not support 640 * 480
[CAMERA] use support for the first resolution
[CAMERA] camera pixelformat: NV21
[CAMERA] Resolution size : 720 * 480
[CAMERA] The photo save path is /tmp.
[CAMERA] The number of photos taken is 5.
beginion_alloc_open
pid: 1543, g_alloc_context = 0xc97158
[CAMERA] Camera captur[ 69.914962] [tvd] tvd_isr:810 In tvd_isr
eframerate is 0/0
[CAMERA] VIDIOC_S_FMT succeed
[CAMERA] fmt.type = 1
[CAMERA] fmt.fmt.pix.width = 720
[CAMERA] fmt.fmt.pix.height = 480
[CAMERA] fmt.fmt.pix.pixelformat = NV21
[CAMERA] fmt.fmt.pix.field = 1
[CAMERA_DEBUG] reqbuf number is 3
[CAMERA_DEBUG] map buffer index: 0, mem: 0xb6d27000, len: 7e900, offset: 0
[CAMERA_DEBUG] map buffer index: 1, mem: 0xb6ca8000, len: 7e900, offset: 7f000
[CAMERA_DEBUG] map buffer index: 2, mem: 0xb6c29000, len: 7e900, offset: fe000
[CAMERA] stream on succeed
[CAMERA] camera0 capture num is [0]
[CAMERA_DEBUG]*****DQBUF[0] FINISH*****
[CAMERA_PROMPT] the time interval from the start to the first frame is 73 ms
[CAMERA_DEBUG] the interval of two frames is 0 ms
[CAMERA_DEBUG]************QBUF[0] FINISH**************
[CAMERA] camera0 capture num is [1]
[CAMERA_DEBUG]*****DQBUF[1] FINISH*****
[CAMERA_DEBUG] the interval of two frames is 161 ms
[CAMERA_DEBUG]************QBUF[1] FINISH**************
[CAMERA] camera0 capture num is [2]
[CAMERA_DEBUG]*****DQBUF[2] FINISH*****
[CAMERA_DEBUG] the interval of two frames is 161 ms
[CAMERA_DEBUG]************QBUF[2] FINISH**************
[CAMERA] camera0 capture num is [3]
[CAMERA_DEBUG]*****DQBUF[0] FINISH*****
[CAMERA_DEBUG] the interval of two frames is 162 ms
[CAMERA_DEBUG]************QBUF[0] FINISH**************
[CAMERA] camera0 capture num is [4]
[CAMERA_DEBUG]*****DQBUF[1] FINISH*****
[CAMERA_DEBUG] the interval of two frames is 161 ms
[CAMERA_DEBUG]************QBUF[1] FINISH**************
[CAMERA] Capture thread finish
[CAMERA_DEBUG]***************************************************************
[CAMERA_DEBUG] Query the actual frame rate.
[CAMERA_DEBUG] camera fps = 31.2.
[ 72.853618] [tvd] vidioc_s_fmt_vid_cap:1623
[ 72.853618] interface=0
[ 72.853618] system=NTSC
[ 72.853618] format=0
[ 72.853618] output_fmt=YUV420
[CAMERA_DEBUG]***************************************************************
[CAMERA] close /dev/video0
ion_alloc_close
pid[ 72.870400] [tvd] vidioc_s_fmt_vid_cap:1627
[ 72.870400] row=1
[ 72.870400] column=1
[ 72.870400] ch[0]=0
[ 72.870400] ch[1]=0
[ 72.870400] ch[2]=0
[ 72.870400] ch[3]=0
: 1543, release g_alloc_context = 0xc97158
[CAMERA_DEBUG]***************************************************************
[CAM[ 72.900202] [tvd] vidioc_s_fmt_vid_cap:1629
[ 72.900202] width=720
[ 72.900202] height=480
[ 72.900202] dev->sel=0
ERA_DEBUG] Performance Testing---format:NV21 size:720 * 480
[ 72.924121] [tvd] tvd_cagc_and_3d_config:1481 tvd0 agc auto mode
[ 72.936083] [tvd] tvd_cagc_and_3d_config:1490 tvd0 CAGC enable:0x1
[ 72.945822] [tvd] tvd_cagc_and_3d_config:1517 tvd0 3d enable :0x4f900000
[ 72.954767] [tvd] vidioc_streamon:1712 Out vidioc_streamon:0
[CAMERA_DEBUG] The interval from open to streaming is 148 ms.
[CAMERA_DEBUG]***************************************************************
root@TinaLinux:/dev#
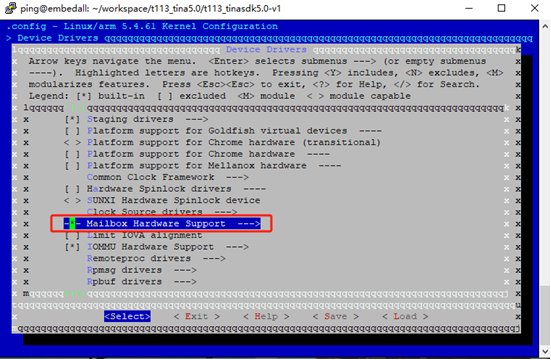
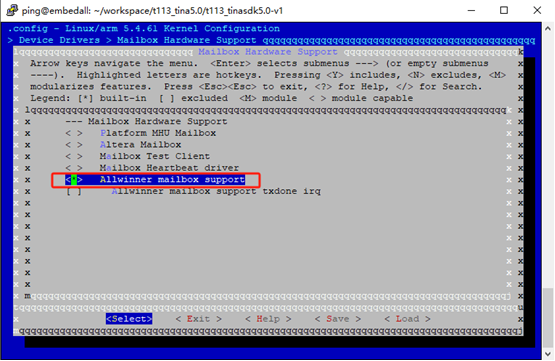
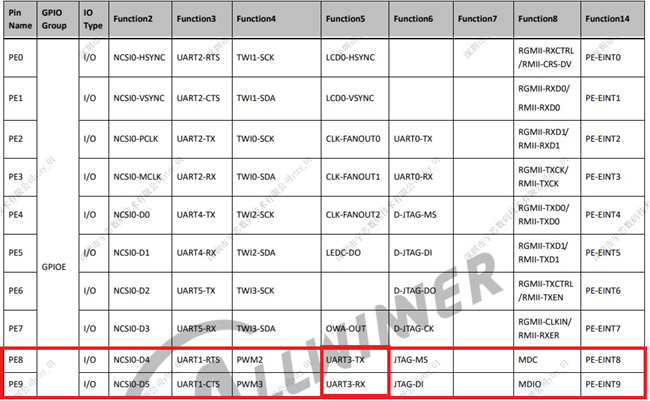
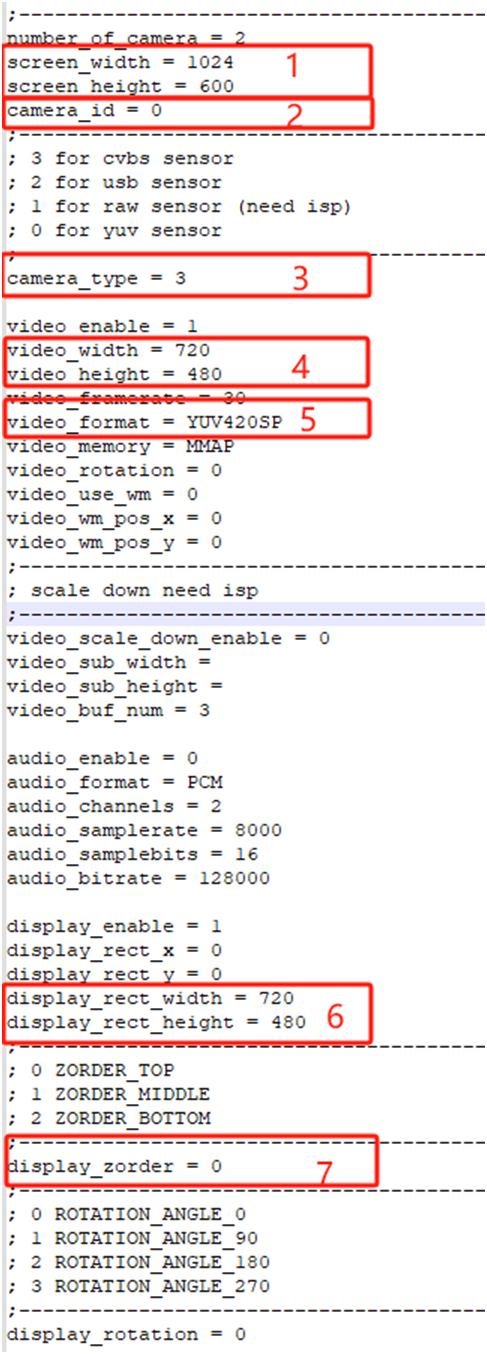
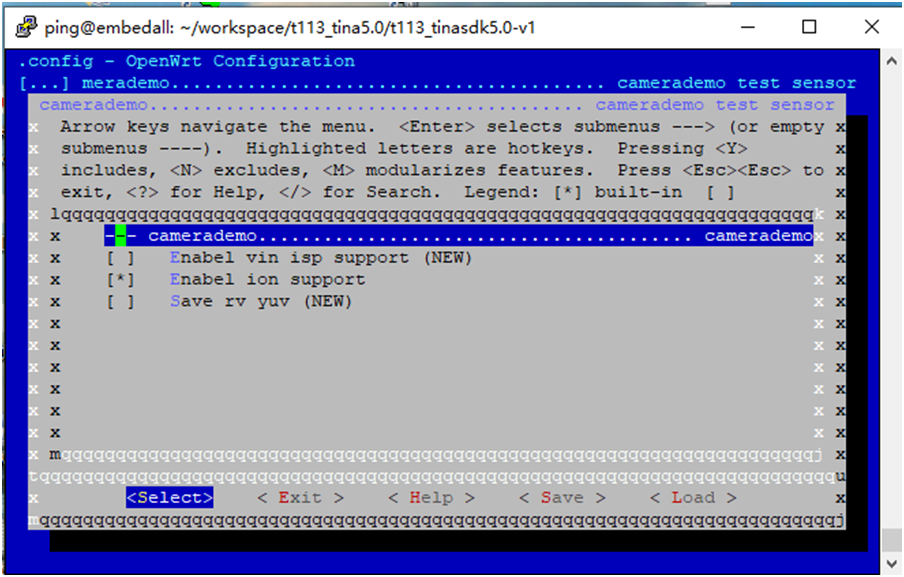
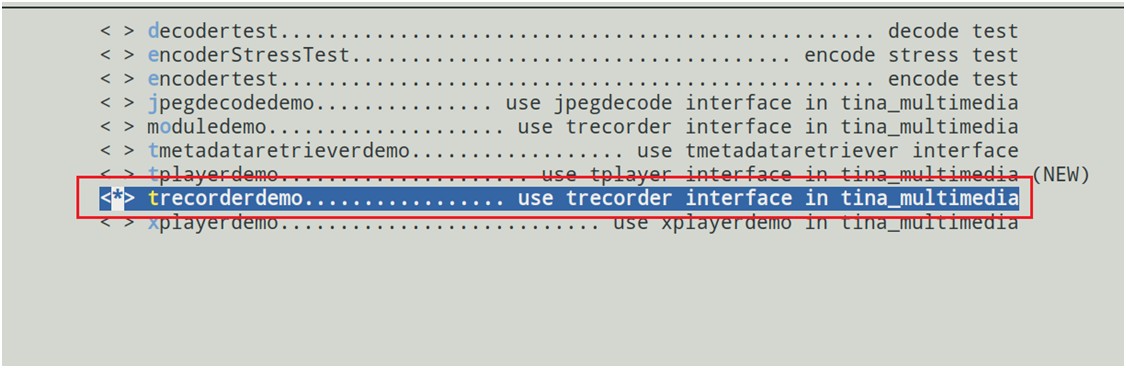
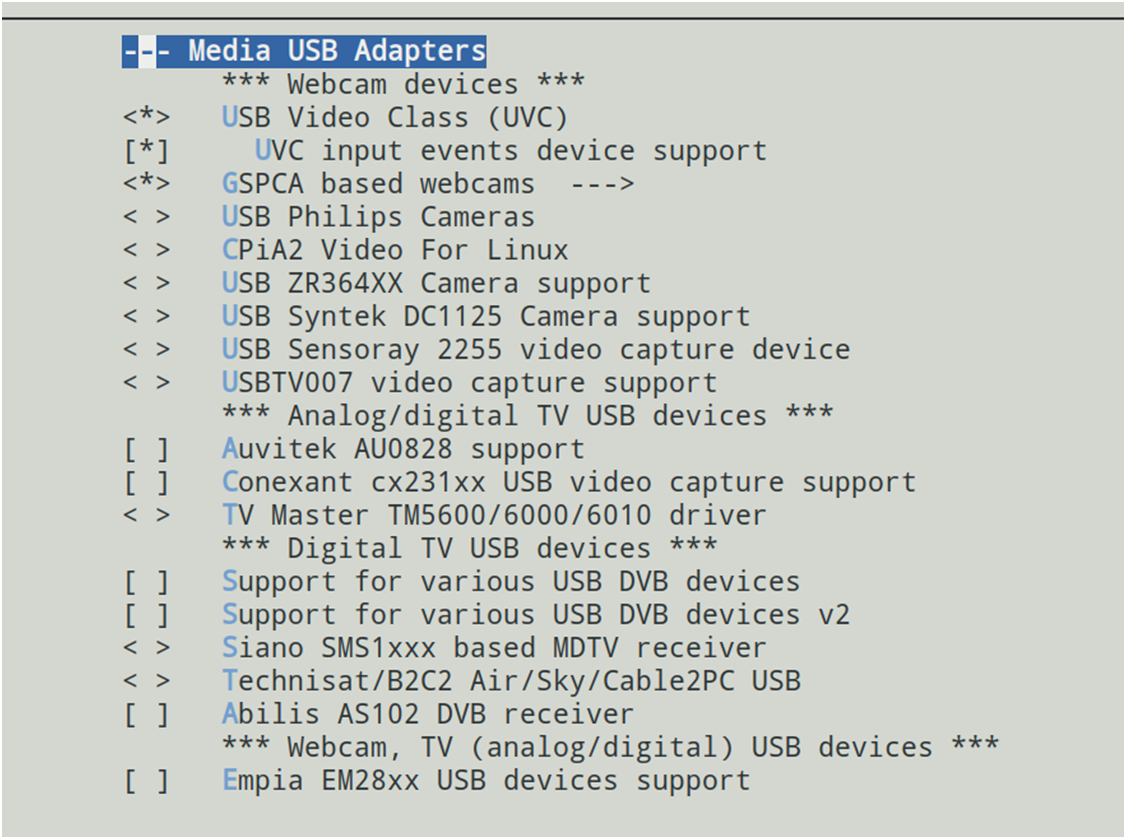
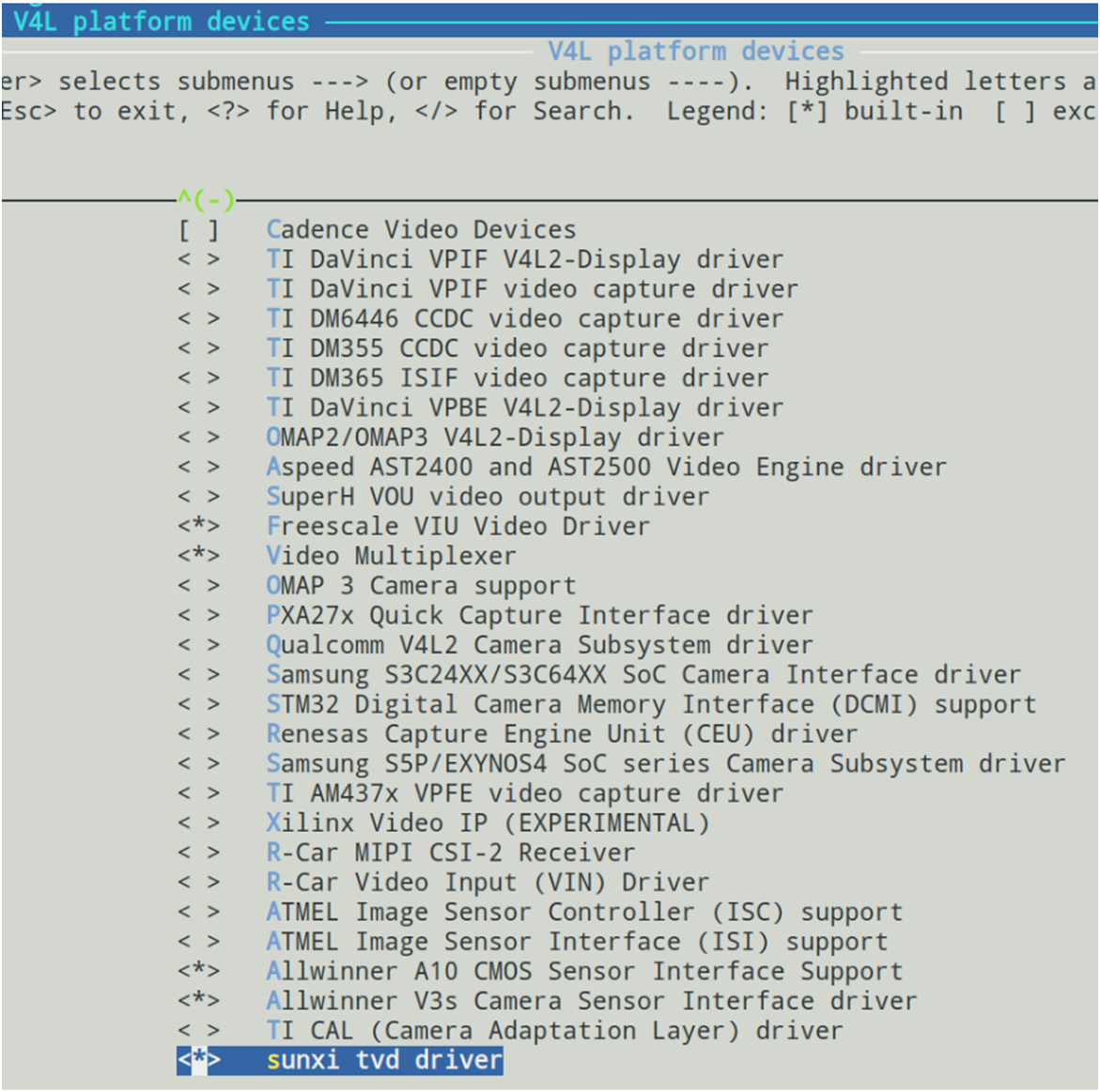
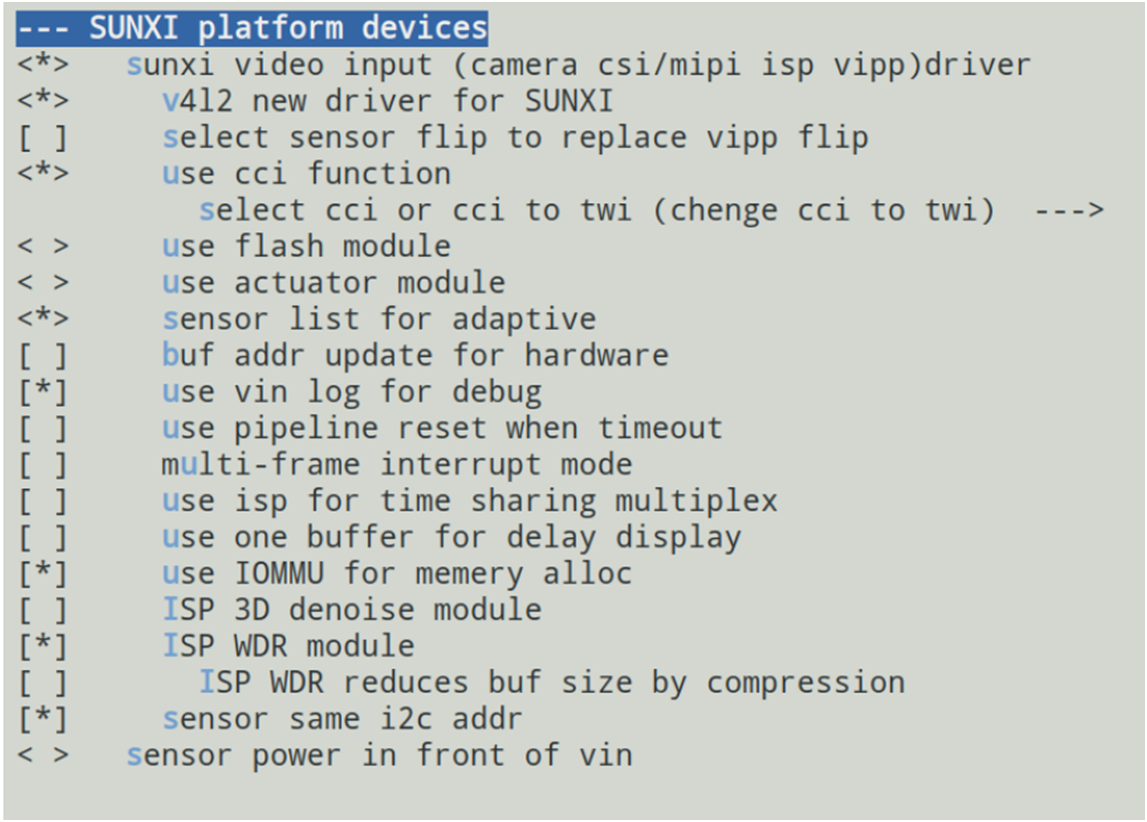
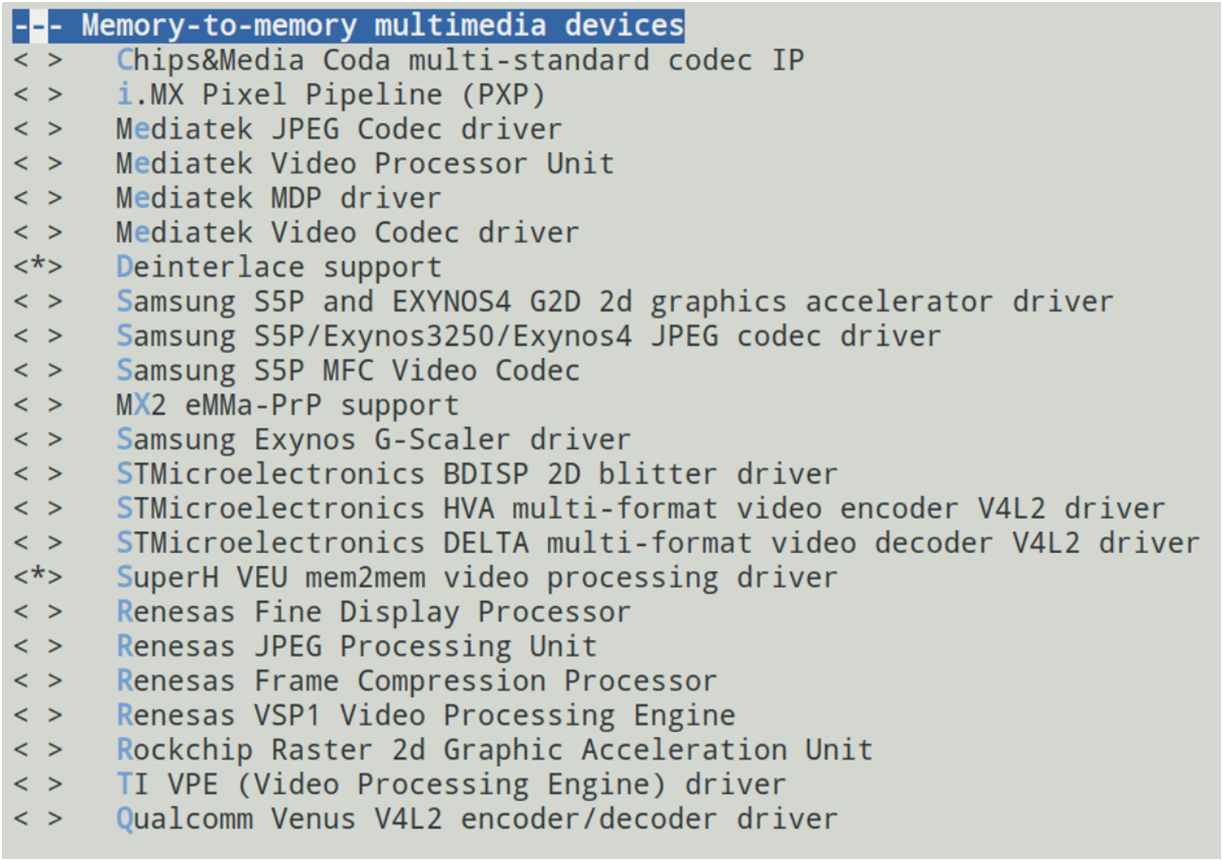
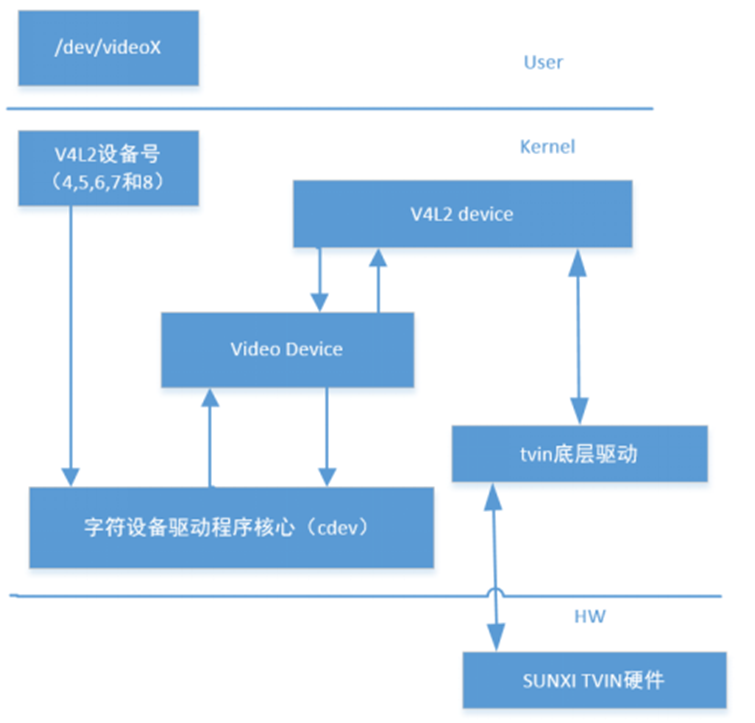
为了演示TVIN接口的使用,在Tina5平台上必须选择以下两个APP,一个是camerademo程序,一个是trecorderademo程序。camerademo程序是一个摄像头视频截图的程序,可以通过它实现摄像头视频的截图,另外,它还具备摄像头属性的判断功能,我们主要是用它来判断camera摄像头的属性,比如输出数据是什么格式(NTSC/PAL,分辨率等)等。trecorderdemo是全志提供的摄像头使用的重要例子,该程序可以实现预览、录音、录像等功能。另外选择的时候务必要注意相关配套库的配置。例如:选择camerademo时,勾选Enable ion support。