@ccccchduan 这里更强
livpo 发布的最佳帖子
-
全志T527芯片详解【二】:高清图像编解码发布在 T Series

硬件模块加持
T527集成了多个图形显示和编解码相关的硬件模块,为高清图像显示、高清视频播放和多路高清摄像头输入提供了强大的硬件基础:
- ARM Mail-G57 GPU
- 自研显示引擎(Display Engine)
- 去隔行处理单元(De-interIace)
- 2D图像加速单元(Graphic2D)
- 视频编解码引擎(Video Engine)
- 自研视觉处理器(ISP)
- 视觉缩放处理单元(VIPP)
- ......
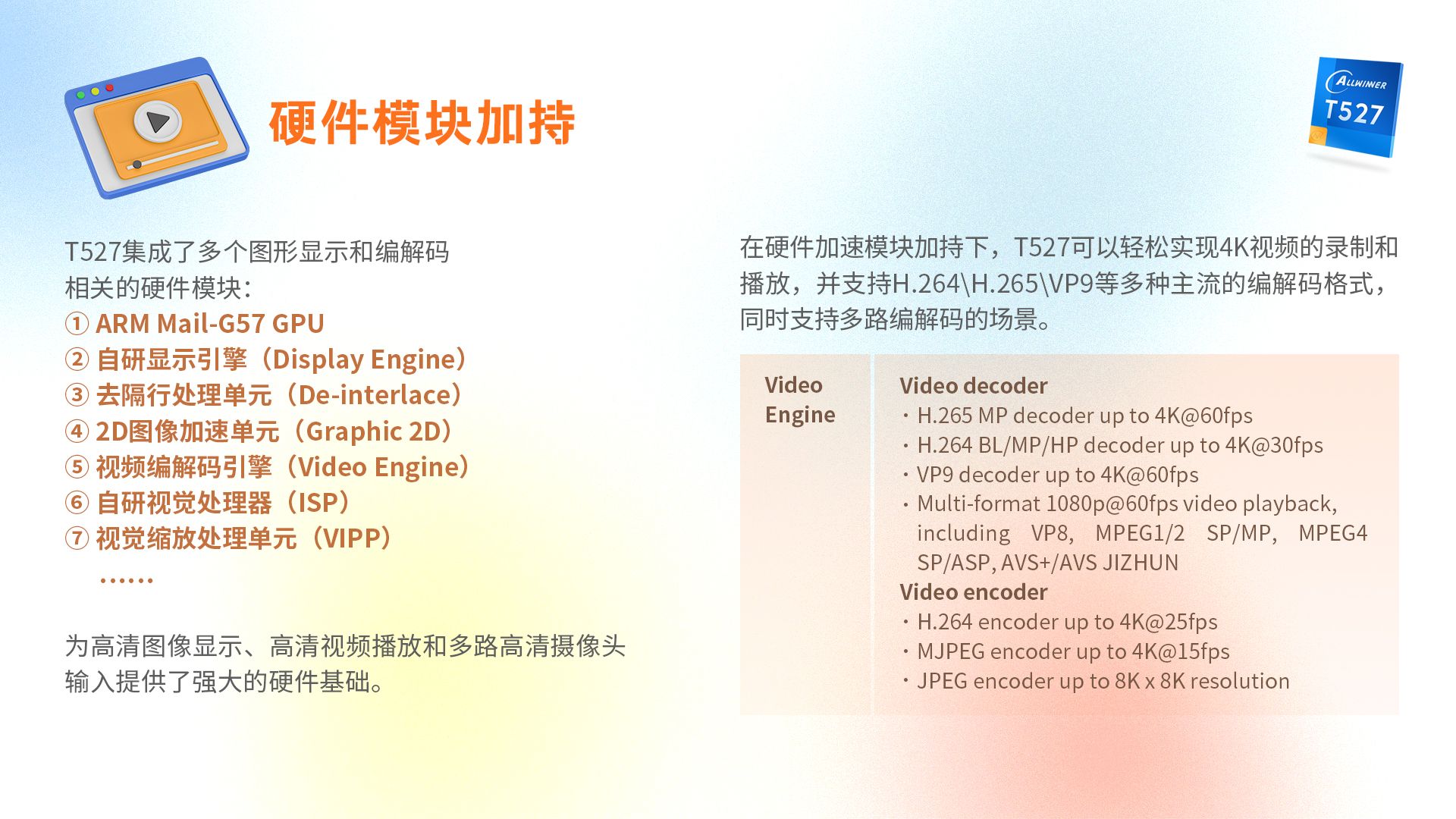
在硬件加速模块加持下,T527可以轻松实现4K视频的录制和播放,并支持H.264\H.265\VP9等多种主流的编解码格式,同时支持多路编解码的场景。
Video decoder
- H.265 MP decoder up to 4K@60fps
- H.264 BL/MP/HP decoder up to 4K@30fps
- VP9 decoder up to 4K@60fps
- Multi-format 1080p@60fps video playback,including VP8,MPEG1/2SP/MP,MPEG4,SP/ASP,AVS+/AVS JIZHUN
Video encoder
- H.264 encoder up to 4K@25fps
- MJPEG encoder up to 4K@15fps
- JPEG encoder up to 8K x 8K resolution
丰富的图像输入输出接口
T527上集成了大量图像输入、输出接口,通过与编解码模块的配合,可以实现4K+1080P的双屏幕异显和实现多达6路摄像头图像的交织输入,为如:收银机、智能座舱、360°摄像头等需要多屏幕交互或多摄像头输出的场景提供了高效的解决方案。
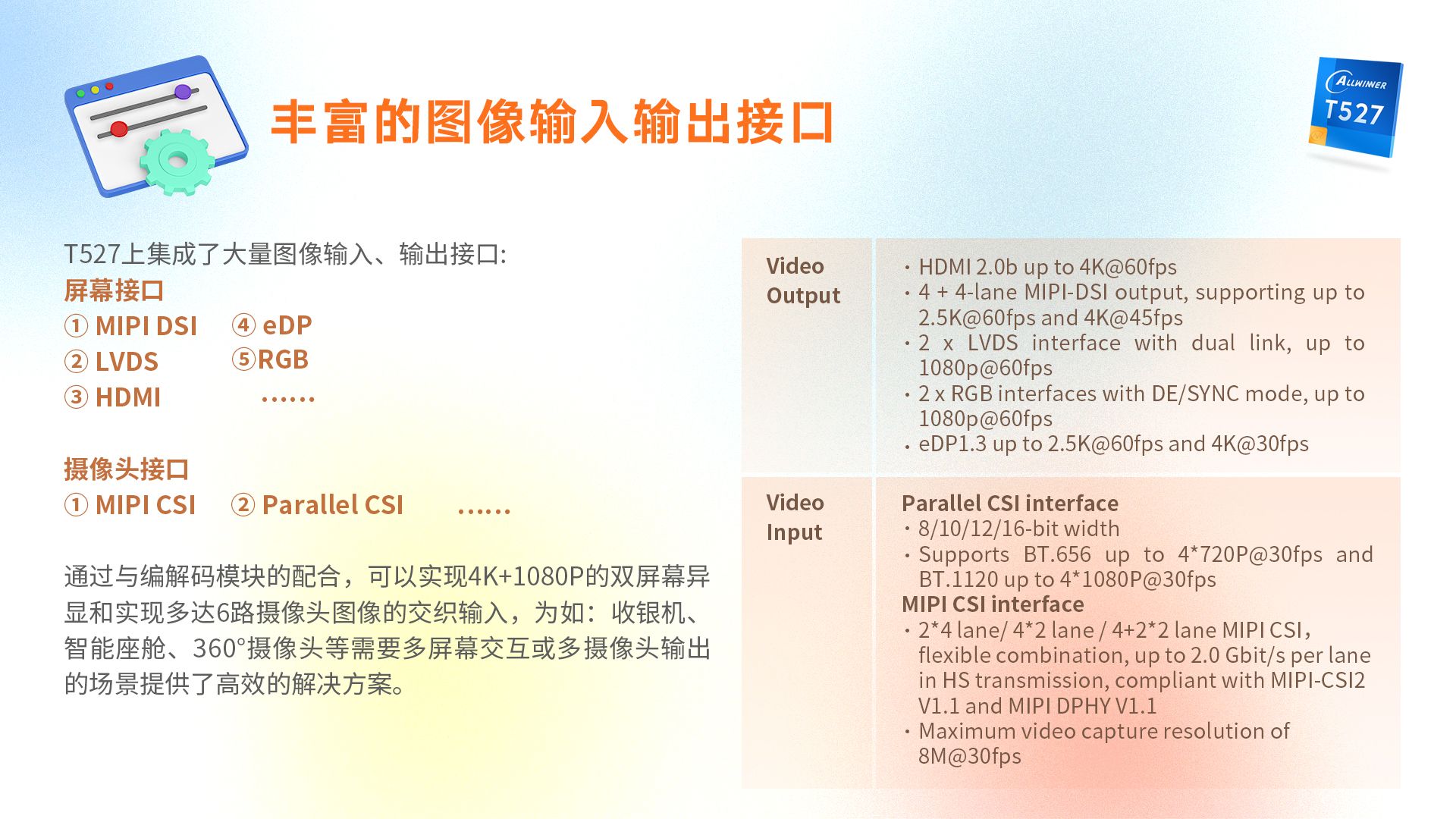
屏幕接口:MIPI DSI 、LVDS、HDMI、eDP、RGB.......
- HDMI2.0b up to 4K@60fps
- 4+4-lane MIPI-DSI output,supporting up to 2.5K@60fps and 4K@45fps
- 2xLVDS interface with dual link, up to I080p@60fps
- 2xRGB interfaces with DE/SYNC mode, up to I080p@60fps
- eDP1.3 up to 2.5K@60fps and 4K@30fps
摄像头接口:MIPI CSI、Parallel CSI
Parallel CSl interface- 8/10/12/16-bit width
- Supports BT.656 up to 4720P@30fps and BT.1120 up to 41080P@30fps
MIPI CSI interface
- 24 lane/42 lane/4+2*2 lane MIPICSI,flexible combination, up to 2.0 Gbit/s per lane in HS transmission,compliant with MIPI-CSI2V1.1 and MIPI DPHYV1.1
- Maximumvideocaptureresolution of 8M@30fps
自研高清画质算法矩阵
全志在显示引擎上硬件固化了自研的高清画质算法矩阵AWonder1.0,提供了多维度的图像处理算法,包括:
- 智能降噪
- 明亮动态
- 清晰细节
- 绚丽色彩
- 精锐去隔行
- 臻彩HDR
- AI-PQ
- ......
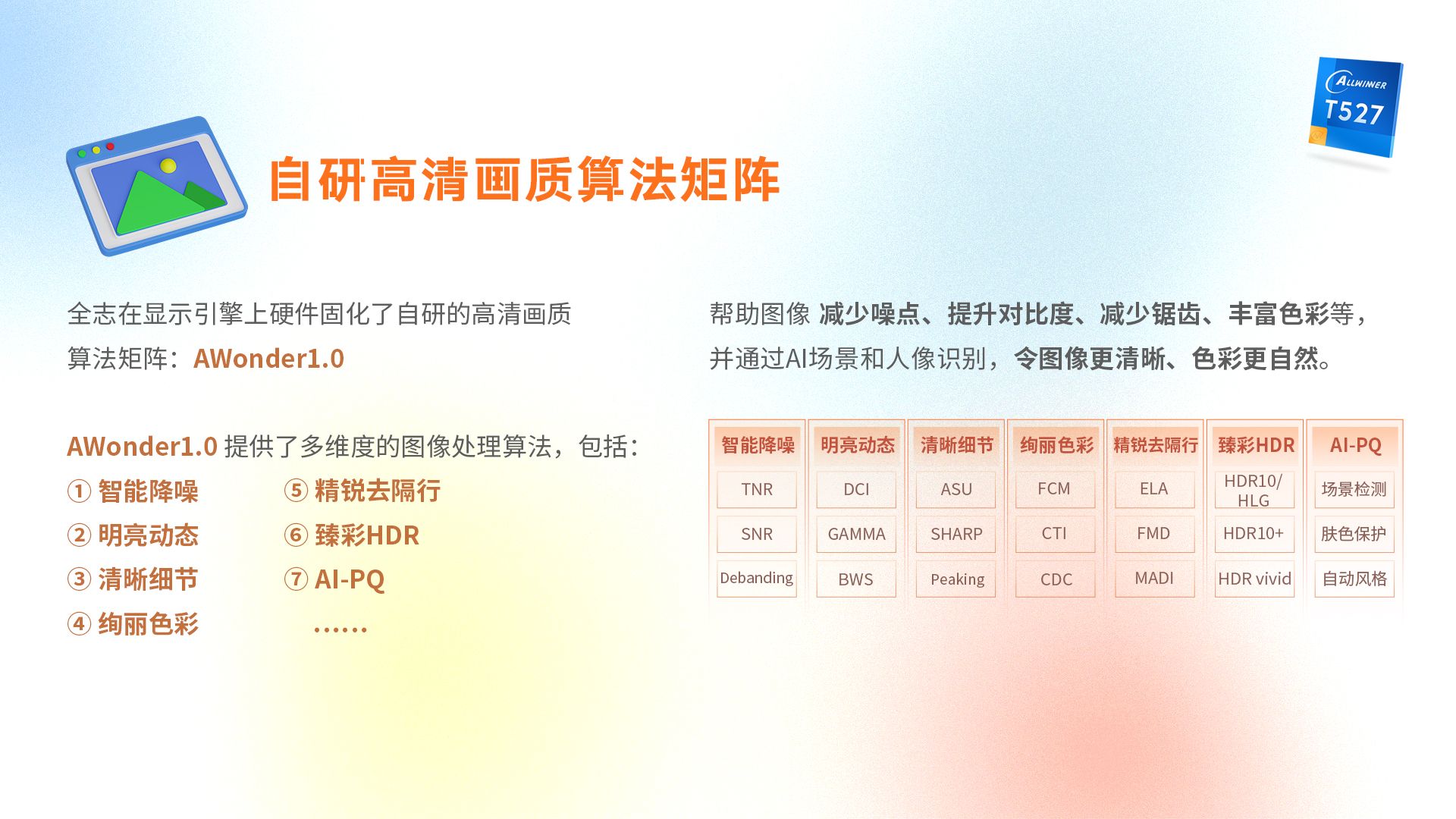
帮助图像减少噪点、提升对比度、减少锯齿、丰富色彩等,并通过AI场景和人像识别,令图像更清晰、色彩更自然。
自研安防级专业图像信号处理器
T527集成了全志自研的安防级专业图像信号处理器 (ISP),该ISP在前序版本上大幅升级多个模块,能更好地应对如行车、户外等运动和光照复杂的场景。
- 时空域多级降噪
- 宽动态合成
- 局部色调映射算法
- ......
同时全志自研推出AI-ISP智能图像处理算法「全志智影」,通过ISP和NPU深度配合,提升了图像的感光度,帮助实现黑光全彩等功能,在车载场景下可以实现全天候无盲区的行车安全监控。
相比传统ISP算法,「全志智影」AI-ISP能够更好地提升暗部清晰度及颜色表现,改善画面整体亮度及色度噪点表现,并大程度地抑制运动拖影的出现。
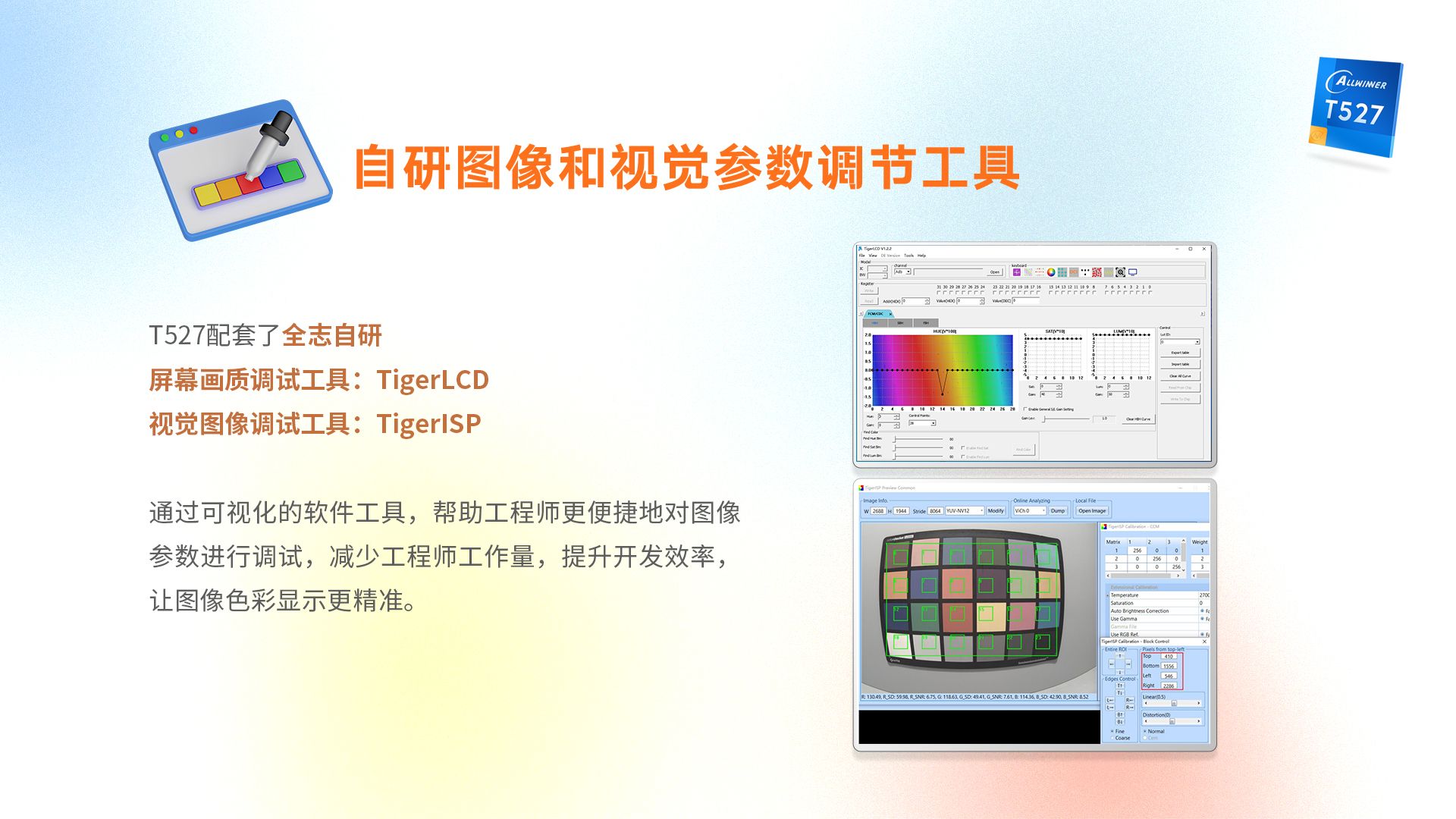
自研图像和视觉参数调节工具
T527配套了全志自研量产工具
- 屏幕画质调试工具:TigerLCD
- 视觉图像调试工具:TigerISP
通过可视化的软件工具,帮助工程师更便捷地对图像参数进行调试,减少工程师工作量,提升开发效率,让图像色彩显示更精准。

-
【R128】应用开发案例——点亮一颗 LED 灯发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail

点亮一颗 LED 灯
本文案例代码 下载地址 点亮一颗 LED 灯案例代码 https://www.aw-ol.com/downloads?cat=24 首先我们搭建电路,如下:

引脚 LED PA18 红色 LED PA13 绿色 LED PA12 黄色 LED 载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1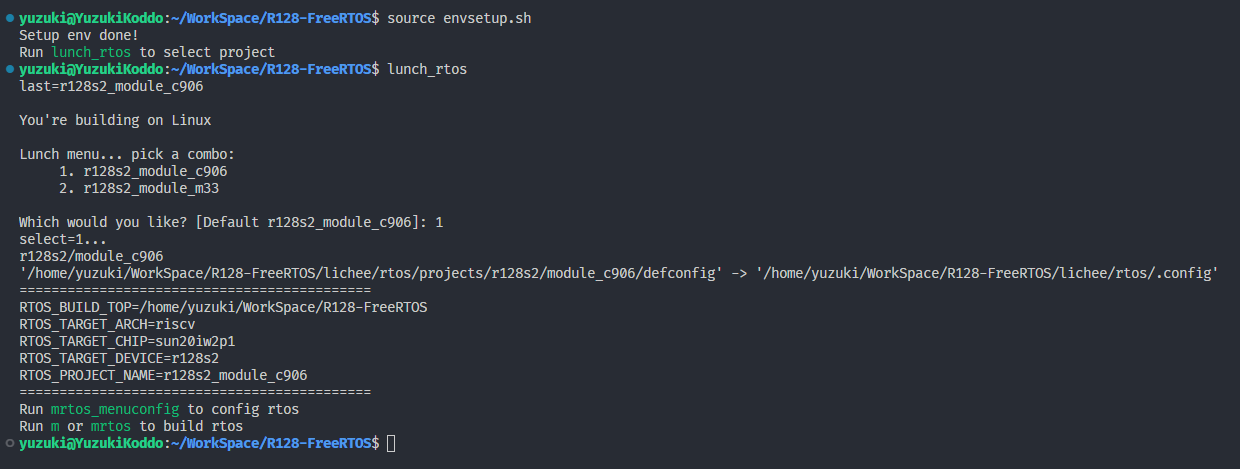
勾选 GPIO 驱动
mrtos_menuconfig找到下列驱动Drivers Options ---> soc related device drivers ---> GPIO devices ---> [*] enable GPIO driver [*] enbale GPIO hal APIs Test command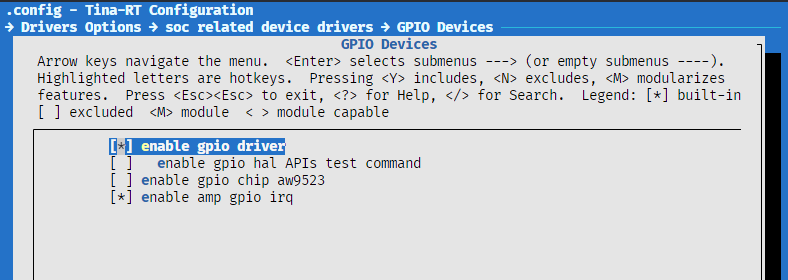
编写程序
打开你喜欢的编辑器,修改文件:
lichee/rtos/projects/r128s2/module_c906/src/main.c
引入头文件
#include <hal_gpio.h>
使用 GPIO 配置引脚
配置 GPIO 的上下拉状态
使用
hal_gpio_set_pull(gpio_pin_t pin, gpio_pull_status_t pull);来设置。这里我们设置PA18引脚为默认上拉状态。hal_gpio_set_pull(GPIOA(18), GPIO_PULL_UP);配置 GPIO 输入输出模式
使用
hal_gpio_set_direction(gpio_pin_t pin, gpio_direction_t direction);来设置 GPIO 的输入输出模式,这里配置为输出模式。hal_gpio_set_direction(GPIOA(18), GPIO_DIRECTION_OUTPUT);配置 GPIO 的 MUX 功能
GPIO 通常有多种功能,需要配置 MUX 选择需要的功能,使用
hal_gpio_pinmux_set_function(gpio_pin_t pin, gpio_muxsel_t function_index);来设置 GPIO 的复用功能,这里配置为GPIO 输出模式(GPIO_MUXSEL_OUT)hal_gpio_pinmux_set_function(GPIOA(18), GPIO_MUXSEL_OUT);配置 GPIO 的电平
使用
hal_gpio_set_data(gpio_pin_t pin, gpio_data_t data);来配置 GPIO 的电平,这里配置PA18为高电平点亮 LEDhal_gpio_set_data(GPIOA(18), GPIO_DATA_HIGH);完整的配置 GPIO
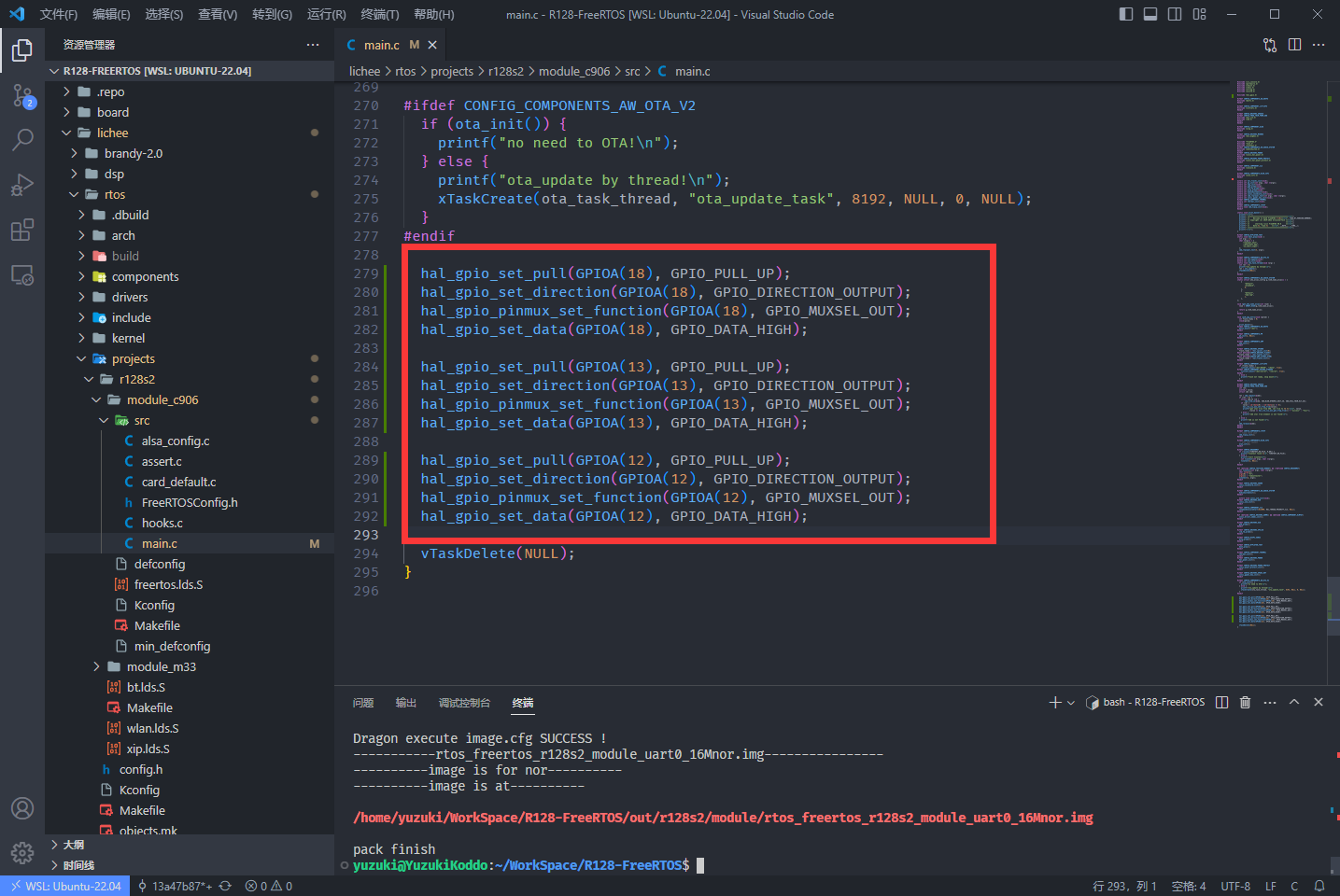
hal_gpio_set_pull(GPIOA(18), GPIO_PULL_UP); // 配置 GPIO 的上下拉状态 hal_gpio_set_direction(GPIOA(18), GPIO_DIRECTION_OUTPUT); // 配置 GPIO 输入输出模式 hal_gpio_pinmux_set_function(GPIOA(18), GPIO_MUXSEL_OUT); // 配置 GPIO 的 MUX 功能 hal_gpio_set_data(GPIOA(18), GPIO_DATA_HIGH); // 配置 GPIO 的电平以此类推,我们同时配置
PA18,PA13,PA12的 GPIOhal_gpio_set_pull(GPIOA(18), GPIO_PULL_UP); hal_gpio_set_direction(GPIOA(18), GPIO_DIRECTION_OUTPUT); hal_gpio_pinmux_set_function(GPIOA(18), GPIO_MUXSEL_OUT); hal_gpio_set_data(GPIOA(18), GPIO_DATA_HIGH); hal_gpio_set_pull(GPIOA(13), GPIO_PULL_UP); hal_gpio_set_direction(GPIOA(13), GPIO_DIRECTION_OUTPUT); hal_gpio_pinmux_set_function(GPIOA(13), GPIO_MUXSEL_OUT); hal_gpio_set_data(GPIOA(13), GPIO_DATA_HIGH); hal_gpio_set_pull(GPIOA(12), GPIO_PULL_UP); hal_gpio_set_direction(GPIOA(12), GPIO_DIRECTION_OUTPUT); hal_gpio_pinmux_set_function(GPIOA(12), GPIO_MUXSEL_OUT); hal_gpio_set_data(GPIOA(12), GPIO_DATA_HIGH);结果
编译固件后烧录,可以看到三色 LED 灯同时亮起。
流水灯
为了实现流水灯,我们先实现一个
sleep函数static inline int msleep(int ms) { vTaskDelay(ms / portTICK_RATE_MS); }然后实现流水灯逻辑即可,之前已经设置过的GPIO状态不需要重复设置。
while (1) { hal_gpio_set_data(GPIOA(18), GPIO_DATA_HIGH); hal_gpio_set_data(GPIOA(13), GPIO_DATA_LOW); hal_gpio_set_data(GPIOA(12), GPIO_DATA_LOW); msleep(100); hal_gpio_set_data(GPIOA(18), GPIO_DATA_LOW); hal_gpio_set_data(GPIOA(13), GPIO_DATA_HIGH); hal_gpio_set_data(GPIOA(12), GPIO_DATA_LOW); msleep(100); hal_gpio_set_data(GPIOA(18), GPIO_DATA_LOW); hal_gpio_set_data(GPIOA(13), GPIO_DATA_LOW); hal_gpio_set_data(GPIOA(12), GPIO_DATA_HIGH); msleep(100); }
-
【R128】应用开发案例——DBI驱动ST7789V1.3寸LC发布在 MR Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
DBI驱动ST7789V1.3寸LCD
之前介绍了 R128 平台使用 SPI 驱动显示屏 ST7789V1.3寸 LCD,接下来介绍的是使用 DBI 接口驱动。
R128 平台提供了 SPI DBI 的 SPI TFT 接口,具有如下特点:
- Supports DBI Type C 3 Line/4 Line Interface Mode
- Supports 2 Data Lane Interface Mode
- Supports data source from CPU or DMA
- Supports RGB111/444/565/666/888 video format
- Maximum resolution of RGB666 240 x 320@30Hz with single data lane
- Maximum resolution of RGB888 240 x 320@60Hz or 320 x 480@30Hz with dual data lane
- Supports tearing effect
- Supports software flexible control video frame rate
同时,提供了 SPILCD 驱动框架以供 SPI 屏幕使用。
此次适配的SPI屏为
ZJY130S0800TG01,使用的是 DBI 进行驱动。DBI接口的全称是
Display Bus Serial Interface,在显示屏数据手册中,一般会说这是SPI接口,所以有人会误认为SPI屏可以使用normal spi去直接驱动。SPI 接口就是俗称的4线模式,这是因为发送数据时需要额外借助
DC线来区分命令和数据,与sclk,cs和sda共四线。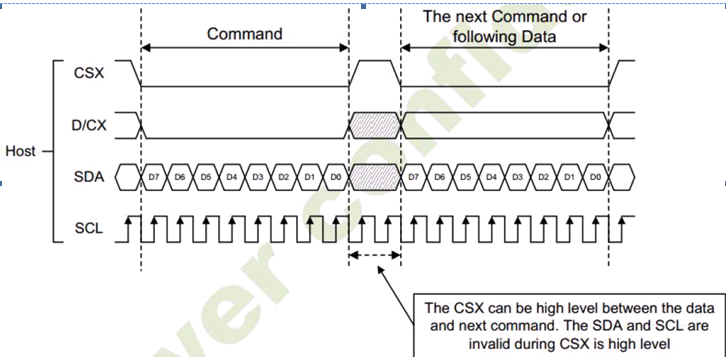
DBI 分为多种接口,包括
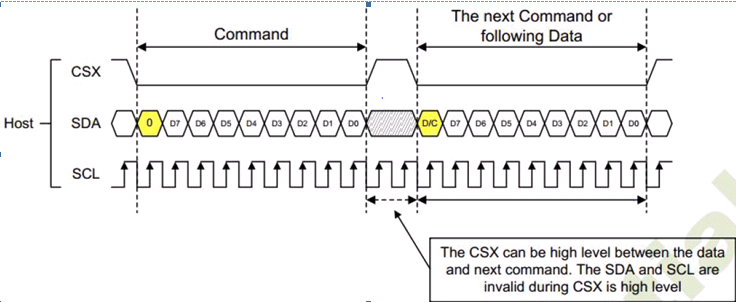
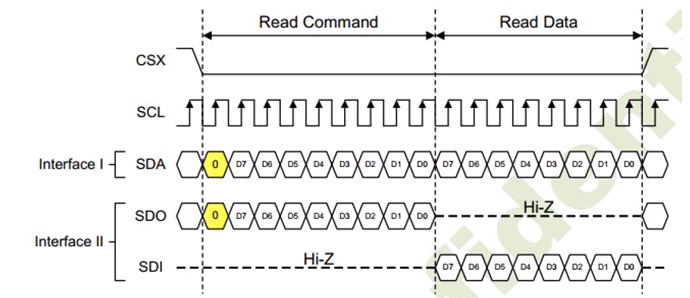
0:L3I1 1:L3I2 2:L4I1 3:L4I2 4:D2LIL3I1和L3I2是三线模式(不需要DC脚),区别是读时序,也就是是否需要额外脚来读寄存器。读写时序图如下:- L3I1写时序
- L3I1读时序
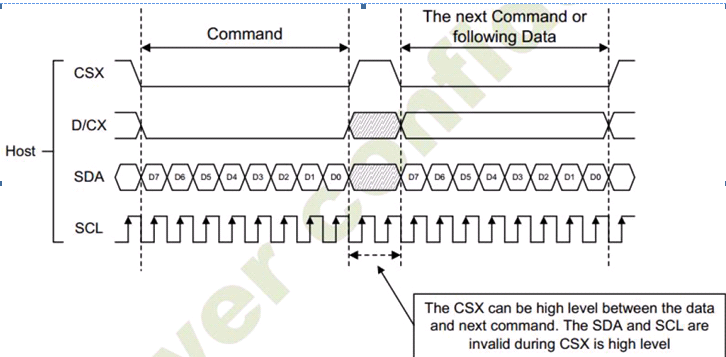
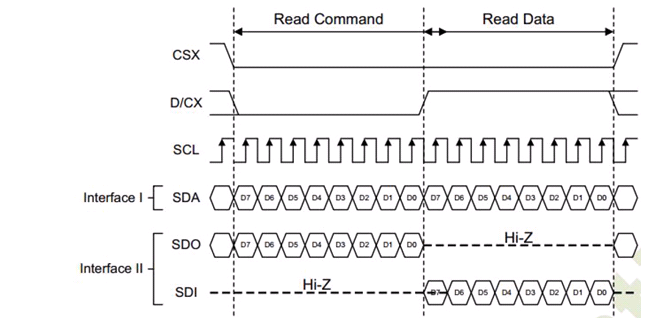
L4I1和L4I2是四线模式,与spi接口协议一样,区别是DC脚的控制是否自动化控制,另外I2和I1的区别是读时序,也就是否需要额外脚来读取寄存器。- L4I写时序
- L4I读时序
D2LI是两data lane模式。发送命令部分时序与读时序与L3I1一致,下图是发送数据时的时序,不同像素格式时钟周期数量不一样。- D2LI写时序

可以知道,在3线模式时,发送命令前有1位A0用于指示当前发送的是数据,还是命令。而命令后面接着的数据就没有这个A0位了,代表 SPI 需要在 9 位和 8 位之间来回切换,而在读数据时,更是需要延时
dummy clock才能读数据,normal spi都很难,甚至无法实现。所以normal spi只能模拟 4 线的 DBI 的写操作。读操作只能通过模拟IO来实现。对于R128这类支持 DBI 接口的CPU,可以选择不去了解 SPI。直接选用 DBI 来驱动屏幕。由于不需要模拟延时和切换数据,屏幕驱动效率将有明显提升。
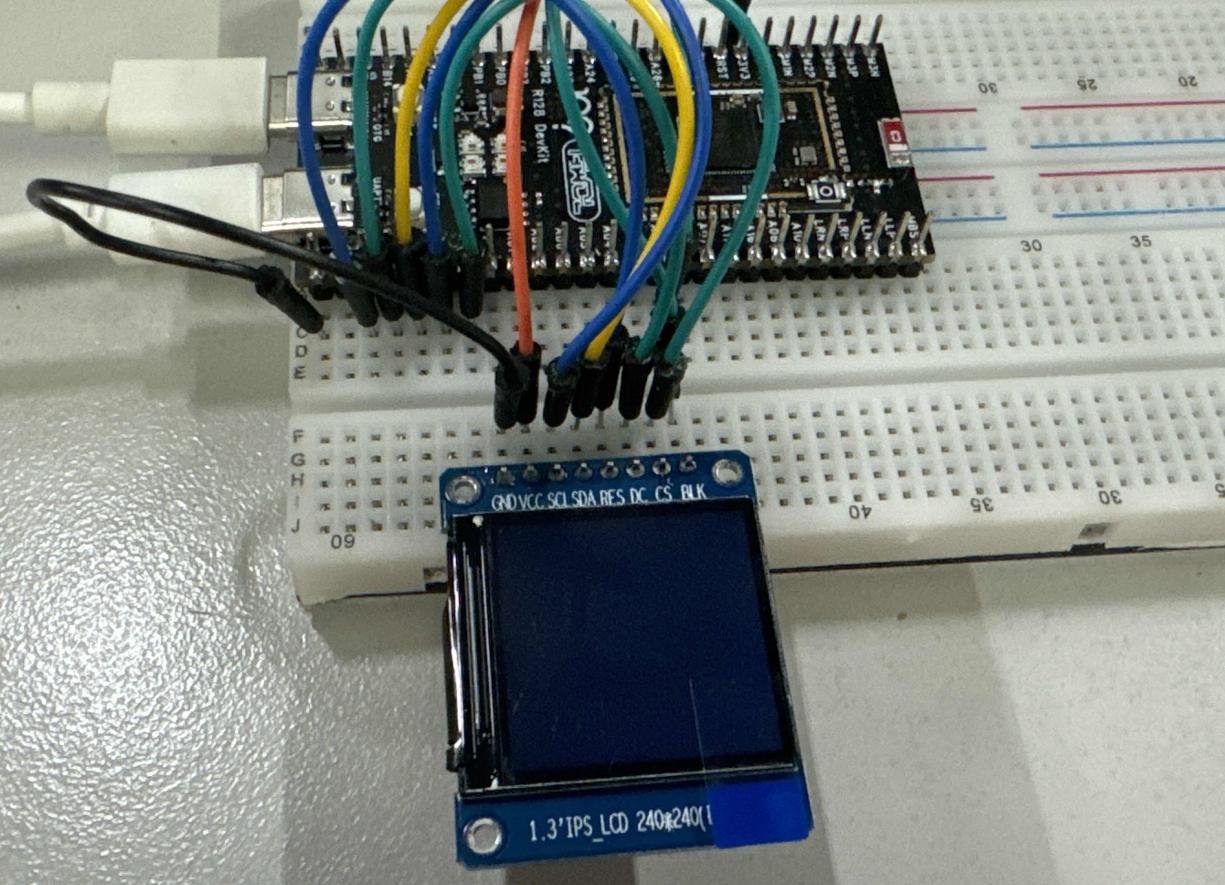
引脚配置如下:
R128 Devkit TFT 模块 PA12 CS PA13 SCL PA18 SDA PA9 BLK PA20 RES PA19 DC 3V3 VCC GND GND 载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1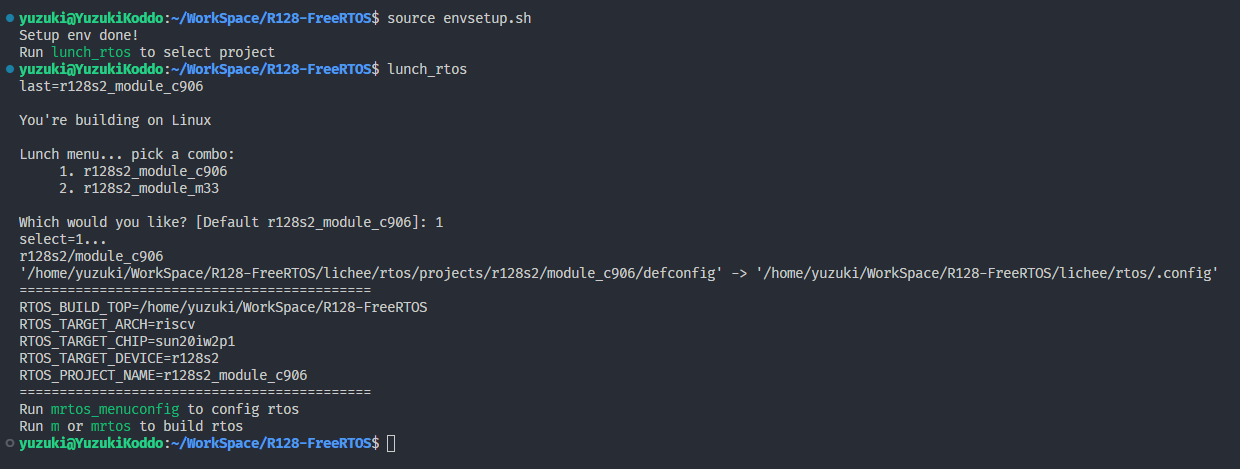
设置 DBI 驱动
屏幕使用的是SPI驱动,所以需要勾选SPI驱动,运行
mrtos_menuconfig进入配置页面。前往下列地址找到SPI DevicesDrivers Options ---> soc related device drivers ---> DBI Devices ---> -*- enable dbi driver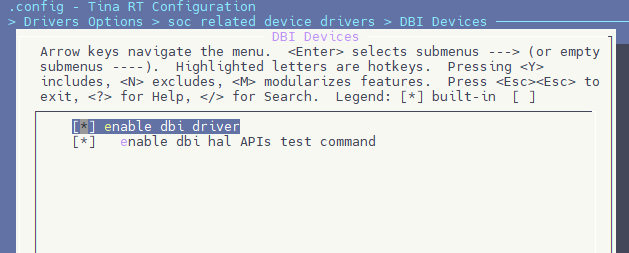
配置 SPI 引脚
DBI同样使用 SPI 控制器,所以需要配置SPI的相关配置。打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex,在这里我们不需要用到SPI WP引脚,注释掉即可。SPI HOLD 需要作为 DC 脚接入LCD模块。;---------------------------------------------------------------------------------- ;SPI controller configuration ;---------------------------------------------------------------------------------- ;Please config spi in dts [spi1] spi1_used = 1 spi1_cs_number = 1 spi1_cs_bitmap = 1 spi1_cs0 = port:PA12<6><0><3><default> spi1_sclk = port:PA13<6><0><3><default> spi1_mosi = port:PA18<6><0><3><default> spi1_miso = port:PA21<6><0><3><default> spi1_hold = port:PA19<6><0><2><default> ;spi1_wp = port:PA20<6><0><2><default>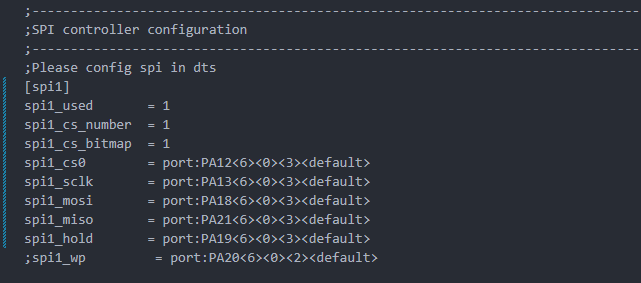
设置 PWM 驱动
屏幕背光使用的是PWM驱动,所以需要勾选PWM驱动,运行
mrtos_menuconfig进入配置页面。前往下列地址找到PWM DevicesDrivers Options ---> soc related device drivers ---> PWM Devices ---> -*- enable pwm driver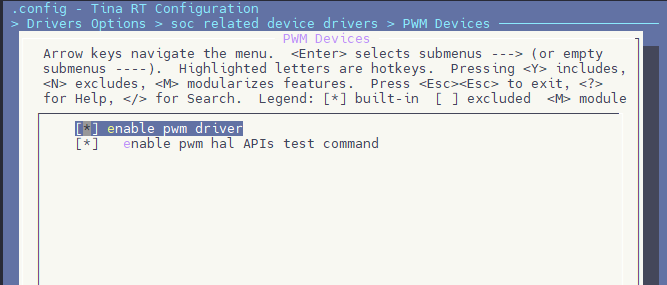
配置 PWM 引脚
打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex,增加 PWM1 节点[pwm1] pwm_used = 1 pwm_positive = port:PA9<4><0><3><default>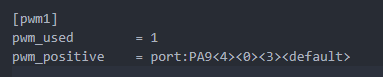
设置 SPI LCD 驱动
SPI LCD 由专门的驱动管理。运行
mrtos_menuconfig进入配置页面。前往下列地址找到SPILCD Devices,注意同时勾选spilcd hal APIs test方便测试使用。Drivers Options ---> soc related device drivers ---> [*] DISP Driver Support(spi_lcd) [*] spilcd hal APIs test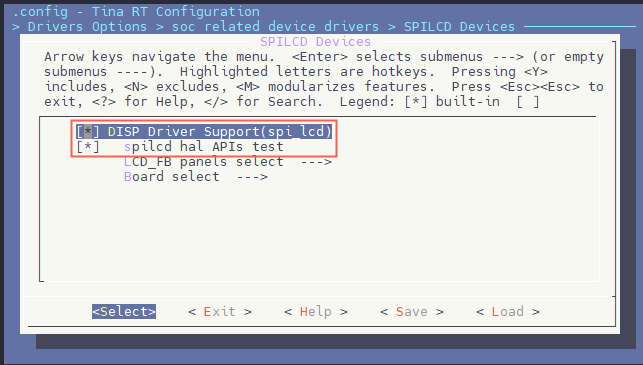
编写 SPI LCD 显示屏驱动
获取屏幕初始化序列
首先询问屏厂提供驱动源码
找到 LCD 的初始化序列代码
找到屏幕初始化的源码
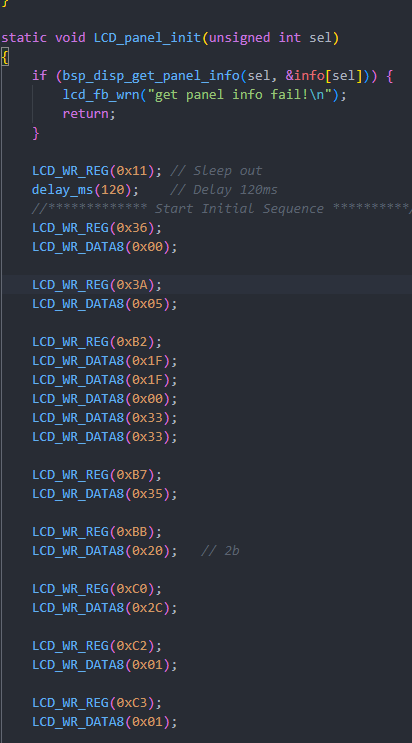
整理后的初始化代码如下:
LCD_WR_REG(0x11); // Sleep out delay_ms(120); // Delay 120ms //************* Start Initial Sequence **********// LCD_WR_REG(0x36); LCD_WR_DATA8(0x00); LCD_WR_REG(0x3A); LCD_WR_DATA8(0x05); LCD_WR_REG(0xB2); LCD_WR_DATA8(0x1F); LCD_WR_DATA8(0x1F); LCD_WR_DATA8(0x00); LCD_WR_DATA8(0x33); LCD_WR_DATA8(0x33); LCD_WR_REG(0xB7); LCD_WR_DATA8(0x35); LCD_WR_REG(0xBB); LCD_WR_DATA8(0x20); // 2b LCD_WR_REG(0xC0); LCD_WR_DATA8(0x2C); LCD_WR_REG(0xC2); LCD_WR_DATA8(0x01); LCD_WR_REG(0xC3); LCD_WR_DATA8(0x01); LCD_WR_REG(0xC4); LCD_WR_DATA8(0x18); // VDV, 0x20:0v LCD_WR_REG(0xC6); LCD_WR_DATA8(0x13); // 0x13:60Hz LCD_WR_REG(0xD0); LCD_WR_DATA8(0xA4); LCD_WR_DATA8(0xA1); LCD_WR_REG(0xD6); LCD_WR_DATA8(0xA1); // sleep in后,gate输出为GND LCD_WR_REG(0xE0); LCD_WR_DATA8(0xF0); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x07); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x25); LCD_WR_DATA8(0x33); LCD_WR_DATA8(0x3C); LCD_WR_DATA8(0x36); LCD_WR_DATA8(0x14); LCD_WR_DATA8(0x12); LCD_WR_DATA8(0x29); LCD_WR_DATA8(0x30); LCD_WR_REG(0xE1); LCD_WR_DATA8(0xF0); LCD_WR_DATA8(0x02); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x05); LCD_WR_DATA8(0x05); LCD_WR_DATA8(0x21); LCD_WR_DATA8(0x25); LCD_WR_DATA8(0x32); LCD_WR_DATA8(0x3B); LCD_WR_DATA8(0x38); LCD_WR_DATA8(0x12); LCD_WR_DATA8(0x14); LCD_WR_DATA8(0x27); LCD_WR_DATA8(0x31); LCD_WR_REG(0xE4); LCD_WR_DATA8(0x1D); // 使用240根gate (N+1)*8 LCD_WR_DATA8(0x00); // 设定gate起点位置 LCD_WR_DATA8(0x00); // 当gate没有用完时,bit4(TMG)设为0 LCD_WR_REG(0x21); LCD_WR_REG(0x29);用现成驱动改写 SPI LCD 驱动
选择一个现成的 SPI LCD 改写即可,这里选择
nv3029s.c驱动来修改
复制这两个驱动,重命名为
st7789v.c
先编辑
st7789v.h将nv3029s改成st7789v
#ifndef _ST7789V_H #define _ST7789V_H #include "panels.h" struct __lcd_panel st7789v_panel; #endif /*End of file*/编辑
st7789v.c将nv3029s改成st7789v
编写初始化序列
先删除
static void LCD_panel_init(unsigned int sel)中的初始化函数。
然后将屏厂提供的初始化序列复制进来
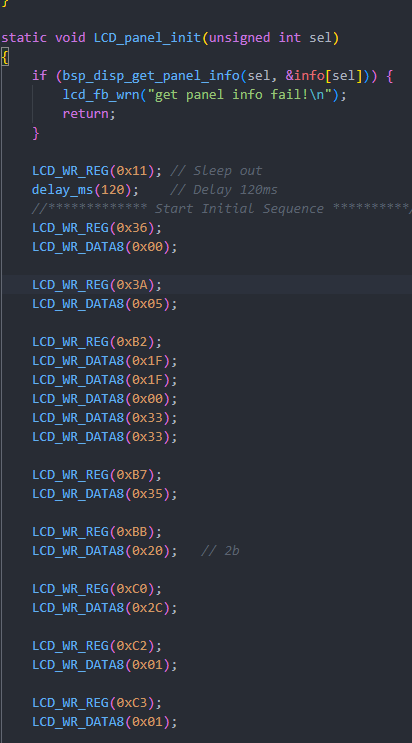
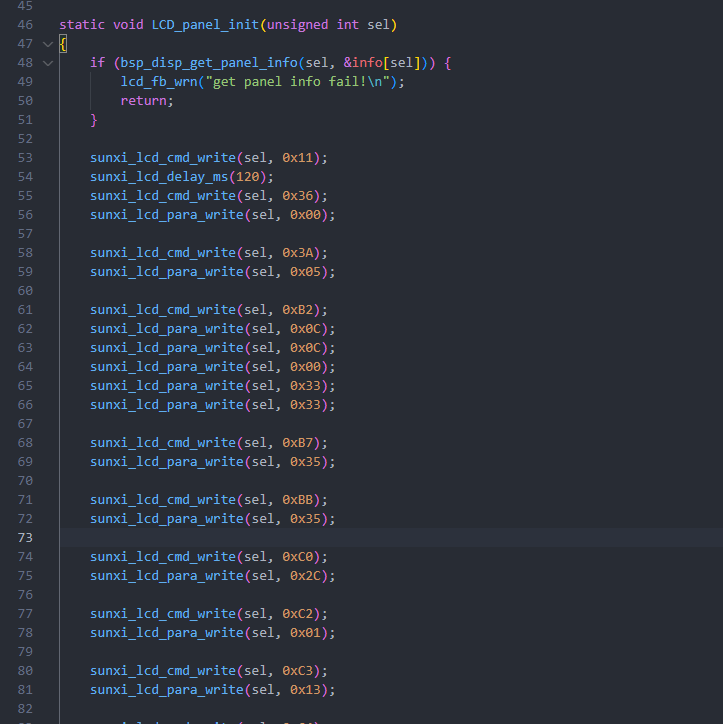
然后按照
spi_lcd框架的接口改写驱动接口,具体接口如下屏厂函数 SPILCD框架接口 LCD_WR_REGsunxi_lcd_cmd_writeLCD_WR_DATA8sunxi_lcd_para_writedelay_mssunxi_lcd_delay_ms可以直接进行替换

完成后如下
然后对照屏厂提供的驱动修改
address函数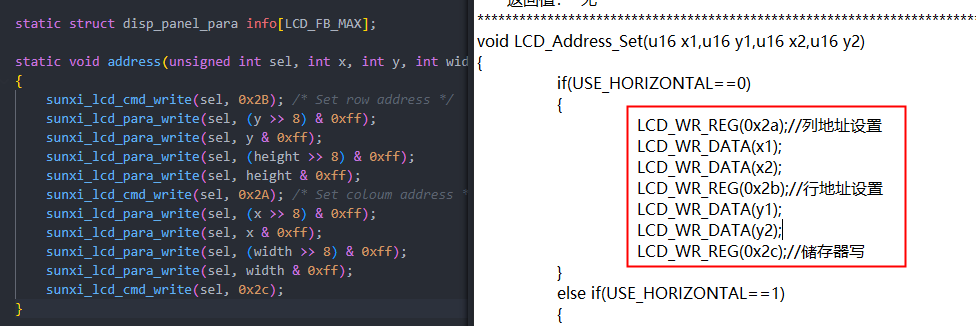
做如下修改
static void address(unsigned int sel, int x, int y, int width, int height) { sunxi_lcd_cmd_write(sel, 0x2B); /* Set row address */ sunxi_lcd_para_write(sel, (y >> 8) & 0xff); sunxi_lcd_para_write(sel, y & 0xff); sunxi_lcd_para_write(sel, (height >> 8) & 0xff); sunxi_lcd_para_write(sel, height & 0xff); sunxi_lcd_cmd_write(sel, 0x2A); /* Set coloum address */ sunxi_lcd_para_write(sel, (x >> 8) & 0xff); sunxi_lcd_para_write(sel, x & 0xff); sunxi_lcd_para_write(sel, (width >> 8) & 0xff); sunxi_lcd_para_write(sel, width & 0xff); sunxi_lcd_cmd_write(sel, 0x2c); }完成驱动如下
#include "st7789v.h" static void LCD_power_on(u32 sel); static void LCD_power_off(u32 sel); static void LCD_bl_open(u32 sel); static void LCD_bl_close(u32 sel); static void LCD_panel_init(u32 sel); static void LCD_panel_exit(u32 sel); #define RESET(s, v) sunxi_lcd_gpio_set_value(s, 0, v) #define power_en(sel, val) sunxi_lcd_gpio_set_value(sel, 0, val) static struct disp_panel_para info[LCD_FB_MAX]; static void address(unsigned int sel, int x, int y, int width, int height) { sunxi_lcd_cmd_write(sel, 0x2B); /* Set row address */ sunxi_lcd_para_write(sel, (y >> 8) & 0xff); sunxi_lcd_para_write(sel, y & 0xff); sunxi_lcd_para_write(sel, (height >> 8) & 0xff); sunxi_lcd_para_write(sel, height & 0xff); sunxi_lcd_cmd_write(sel, 0x2A); /* Set coloum address */ sunxi_lcd_para_write(sel, (x >> 8) & 0xff); sunxi_lcd_para_write(sel, x & 0xff); sunxi_lcd_para_write(sel, (width >> 8) & 0xff); sunxi_lcd_para_write(sel, width & 0xff); sunxi_lcd_cmd_write(sel, 0x2c); } static void LCD_panel_init(unsigned int sel) { if (bsp_disp_get_panel_info(sel, &info[sel])) { lcd_fb_wrn("get panel info fail!\n"); return; } sunxi_lcd_cmd_write(sel, 0x11); // Sleep out sunxi_lcd_delay_ms(120); // Delay 120ms //************* Start Initial Sequence **********// sunxi_lcd_cmd_write(sel, 0x36); sunxi_lcd_para_write(sel, 0x00); sunxi_lcd_cmd_write(sel, 0x3A); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_cmd_write(sel, 0xB2); sunxi_lcd_para_write(sel, 0x1F); sunxi_lcd_para_write(sel, 0x1F); sunxi_lcd_para_write(sel, 0x00); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_cmd_write(sel, 0xB7); sunxi_lcd_para_write(sel, 0x35); sunxi_lcd_cmd_write(sel, 0xBB); sunxi_lcd_para_write(sel, 0x20); // 2b sunxi_lcd_cmd_write(sel, 0xC0); sunxi_lcd_para_write(sel, 0x2C); sunxi_lcd_cmd_write(sel, 0xC2); sunxi_lcd_para_write(sel, 0x01); sunxi_lcd_cmd_write(sel, 0xC3); sunxi_lcd_para_write(sel, 0x01); sunxi_lcd_cmd_write(sel, 0xC4); sunxi_lcd_para_write(sel, 0x18); // VDV, 0x20:0v sunxi_lcd_cmd_write(sel, 0xC6); sunxi_lcd_para_write(sel, 0x13); // 0x13:60Hz sunxi_lcd_cmd_write(sel, 0xD0); sunxi_lcd_para_write(sel, 0xA4); sunxi_lcd_para_write(sel, 0xA1); sunxi_lcd_cmd_write(sel, 0xD6); sunxi_lcd_para_write(sel, 0xA1); // sleep in后,gate输出为GND sunxi_lcd_cmd_write(sel, 0xE0); sunxi_lcd_para_write(sel, 0xF0); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x07); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x25); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_para_write(sel, 0x3C); sunxi_lcd_para_write(sel, 0x36); sunxi_lcd_para_write(sel, 0x14); sunxi_lcd_para_write(sel, 0x12); sunxi_lcd_para_write(sel, 0x29); sunxi_lcd_para_write(sel, 0x30); sunxi_lcd_cmd_write(sel, 0xE1); sunxi_lcd_para_write(sel, 0xF0); sunxi_lcd_para_write(sel, 0x02); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_para_write(sel, 0x21); sunxi_lcd_para_write(sel, 0x25); sunxi_lcd_para_write(sel, 0x32); sunxi_lcd_para_write(sel, 0x3B); sunxi_lcd_para_write(sel, 0x38); sunxi_lcd_para_write(sel, 0x12); sunxi_lcd_para_write(sel, 0x14); sunxi_lcd_para_write(sel, 0x27); sunxi_lcd_para_write(sel, 0x31); sunxi_lcd_cmd_write(sel, 0xE4); sunxi_lcd_para_write(sel, 0x1D); // 使用240根gate (N+1)*8 sunxi_lcd_para_write(sel, 0x00); // 设定gate起点位置 sunxi_lcd_para_write(sel, 0x00); // 当gate没有用完时,bit4(TMG)设为0 sunxi_lcd_cmd_write(sel, 0x21); sunxi_lcd_cmd_write(sel, 0x29); if (info[sel].lcd_x < info[sel].lcd_y) address(sel, 0, 0, info[sel].lcd_x - 1, info[sel].lcd_y - 1); else address(sel, 0, 0, info[sel].lcd_y - 1, info[sel].lcd_x - 1); } static void LCD_panel_exit(unsigned int sel) { sunxi_lcd_cmd_write(sel, 0x28); sunxi_lcd_delay_ms(20); sunxi_lcd_cmd_write(sel, 0x10); sunxi_lcd_delay_ms(20); sunxi_lcd_pin_cfg(sel, 0); } static s32 LCD_open_flow(u32 sel) { lcd_fb_here; /* open lcd power, and delay 50ms */ LCD_OPEN_FUNC(sel, LCD_power_on, 50); /* open lcd power, than delay 200ms */ LCD_OPEN_FUNC(sel, LCD_panel_init, 200); LCD_OPEN_FUNC(sel, lcd_fb_black_screen, 50); /* open lcd backlight, and delay 0ms */ LCD_OPEN_FUNC(sel, LCD_bl_open, 0); return 0; } static s32 LCD_close_flow(u32 sel) { lcd_fb_here; /* close lcd backlight, and delay 0ms */ LCD_CLOSE_FUNC(sel, LCD_bl_close, 50); /* open lcd power, than delay 200ms */ LCD_CLOSE_FUNC(sel, LCD_panel_exit, 10); /* close lcd power, and delay 500ms */ LCD_CLOSE_FUNC(sel, LCD_power_off, 10); return 0; } static void LCD_power_on(u32 sel) { /* config lcd_power pin to open lcd power0 */ lcd_fb_here; power_en(sel, 1); sunxi_lcd_power_enable(sel, 0); sunxi_lcd_pin_cfg(sel, 1); RESET(sel, 1); sunxi_lcd_delay_ms(100); RESET(sel, 0); sunxi_lcd_delay_ms(100); RESET(sel, 1); } static void LCD_power_off(u32 sel) { lcd_fb_here; /* config lcd_power pin to close lcd power0 */ sunxi_lcd_power_disable(sel, 0); power_en(sel, 0); } static void LCD_bl_open(u32 sel) { sunxi_lcd_pwm_enable(sel); /* config lcd_bl_en pin to open lcd backlight */ sunxi_lcd_backlight_enable(sel); lcd_fb_here; } static void LCD_bl_close(u32 sel) { /* config lcd_bl_en pin to close lcd backlight */ sunxi_lcd_backlight_disable(sel); sunxi_lcd_pwm_disable(sel); lcd_fb_here; } /* sel: 0:lcd0; 1:lcd1 */ static s32 LCD_user_defined_func(u32 sel, u32 para1, u32 para2, u32 para3) { lcd_fb_here; return 0; } static int lcd_set_var(unsigned int sel, struct fb_info *p_info) { return 0; } static int lcd_set_addr_win(unsigned int sel, int x, int y, int width, int height) { address(sel, x, y, width, height); return 0; } static int lcd_blank(unsigned int sel, unsigned int en) { return 0; } struct __lcd_panel st7789v_panel = { /* panel driver name, must mach the name of lcd_drv_name in sys_config.fex */ .name = "st7789v", .func = { .cfg_open_flow = LCD_open_flow, .cfg_close_flow = LCD_close_flow, .lcd_user_defined_func = LCD_user_defined_func, .blank = lcd_blank, .set_var = lcd_set_var, .set_addr_win = lcd_set_addr_win, }, };对接驱动框架
完成了屏幕驱动的编写,接下来需要对接到 SPILCD 驱动框架。首先编辑
Kconfig
增加
st7789v的配置
config LCD_SUPPORT_ST7789V bool "LCD support st7789v panel" default n ---help--- If you want to support st7789v panel for display driver, select it.然后编辑
panels.c在panel_array里增加st7789驱动的引用
如下图
#ifdef CONFIG_LCD_SUPPORT_ST7789V &st7789v_panel, #endif之后编辑
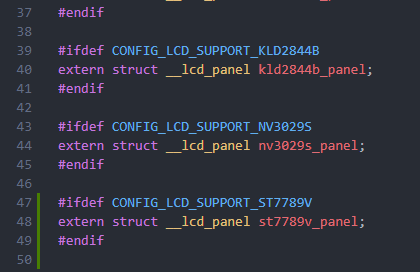
panels.h同样增加引用
如下图
#ifdef CONFIG_LCD_SUPPORT_ST7789V extern struct __lcd_panel st7789v_panel; #endif最后编辑外层的
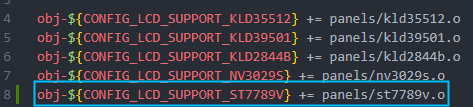
Makefile增加编译选项
如下所示
obj-${CONFIG_LCD_SUPPORT_ST7789V} += panels/st7789v.o选择 ST7789V 驱动
在 SPILCD 驱动选择界面可以看到
LCD_FB panels select选择 SPI 屏幕的驱动进入
LCD_FB panels select选项
选择并勾选
[*] LCD support st7789v panel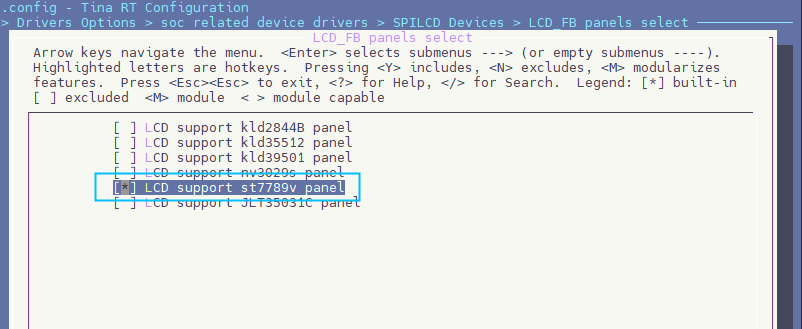
配置 SPI LCD 引脚
这里是重点部分:打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex[lcd_fb0] lcd_used = 1 lcd_model_name = "spilcd" lcd_driver_name = "st7789v" ; 屏幕规格配置 lcd_x = 240 lcd_y = 240 lcd_width = 48 lcd_height = 48 ; SPI 速率 lcd_data_speed = 50 ; PWM 背光配置项 lcd_pwm_used = 1 lcd_pwm_ch = 1 lcd_pwm_freq = 5000 lcd_pwm_pol = 0 lcd_backlight = 100 ; 配置 lcd_if = 1 为 DBI 模式,双缓冲 lcd_if = 1 fb_buffer_num = 2 ; 配置屏幕传输数据的像素格式,这里是 LCDFB_FORMAT_RGB_565 lcd_pixel_fmt = 10 ; 配置 DBI 接口像素格式,这里是 RGB565 lcd_dbi_fmt = 2 ; 配置 DBI 时钟的行为模式,这里是自动停止模式。有数据就有时钟,没发数据就没有时钟 lcd_dbi_clk_mode = 0 ; 屏幕没有 TE 脚,配置 TE 为 0 lcd_dbi_te = 0 ; 配置屏幕 DBI 格式 L4I1 lcd_dbi_if = 2 ; 输入图像数据 RGB 顺序识别设置,这里配置是 RGB 格式 lcd_rgb_order = 0 ; 设置屏的刷新率,单位Hz。当lcd_dbi_te使能时,这个值设置无效。 lcd_fps = 60 ; 使用 SPI1 作为通讯接口 lcd_spi_bus_num = 1 lcd_frm = 2 lcd_gamma_en = 1 lcd_power_num = 0 lcd_gpio_regu_num = 0 lcd_bl_percent_num = 0 ;RESET Pin lcd_gpio_0 = port:PA20<1><0><2><0>编译打包
运行命令
mp编译打包,可以看到编译了st7789v.o
测试
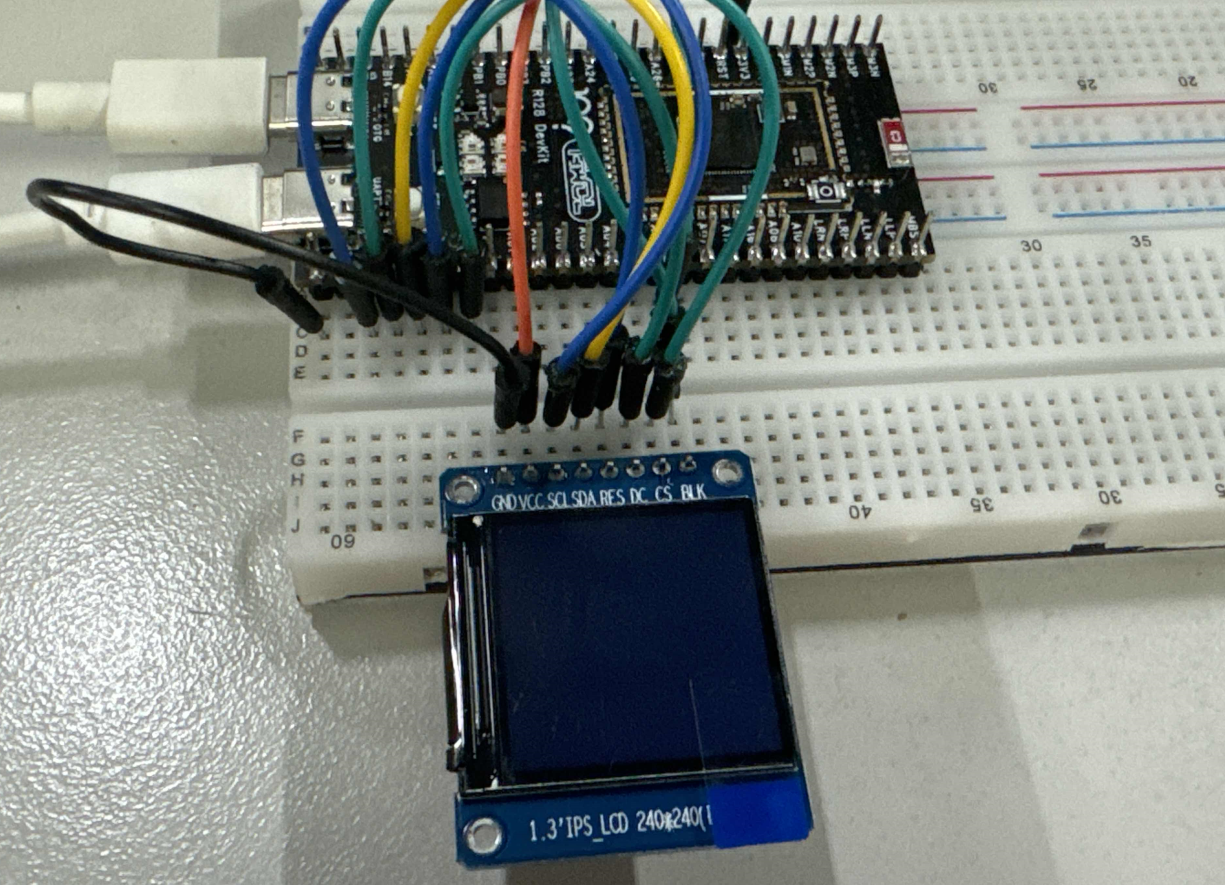
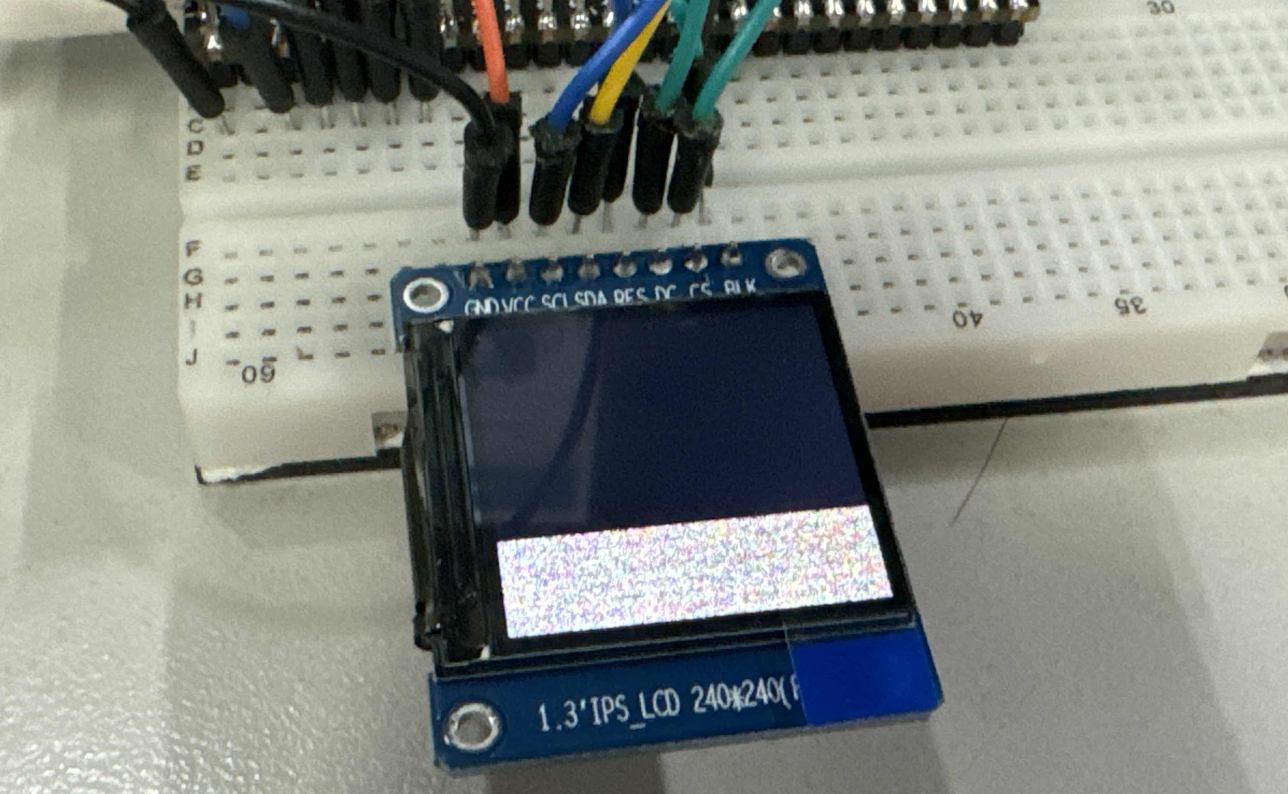
烧录启动之后,屏幕背光启动,但是屏幕全黑。

输入
test_spilcd,屏幕显示蓝色。
输入
lv_examples 1可以显示lvgl界面
常见问题
LVGL 颜色异常
这是由于 LVGL 配置的
LV_COLOR_DEPTH为 32,但是 SPI 屏配置为16位。请修改lv_conf.h,也请注意LV_COLOR_16_SWAP仅有 SPI 需要设置为 1,在使用 DBI 驱动的时候不需要配置为 1。
出现部分花屏
- 检查
address函数是否正确 - 检查
sys_config.fex屏幕配置分辨率是否正确
SPI LCD 颜色相关问题
首先,得先确定显示屏使用的是SPI接口,还是DBI接口,不同的接口,输入数据的解析方式是不一样的。
DBI接口的全称是
Display Bus Serial Interface,在显示屏数据手册中,一般会说这是SPI接口,所以有人会误认为SPI屏可以使用normal spi去直接驱动。阅读
lcd_dbi_if部分的介绍可以知道,在3线模式时,发送命令前有1位A0用于指示当前发送的是数据,还是命令。而命令后面接着的数据就没有这个A0位了,代表SPI需要在9位和8位之间来回切换,而在读数据时,更是需要延时dummy clock才能读数据,normal spi都很难,甚至无法实现。所以normal spi只能模拟4 线的DBI的写操作。对于R128这类支持DBI接口的CPU,可以选择不去了解SPI。如果需要用到SPI去驱动显示屏,必须把显示屏设置成小端。
RGB565和RGB666
SPI显示屏一般支持RGB444,RGB565和RGB666,RGB444使用的比较少,所以只讨论RGB565和RGB666.
RGB565代表一个点的颜色由2字节组成,也就是R(红色)用5位表示,G(绿色)用6位表示,B(蓝色)用5位表示,如下图所示:

RGB666一个点的颜色由3字节组成,每个字节代表一个颜色,其中每个字节的低2位会无视,如下图所示:

SPI 接口
因为SPI接口的通讯效率不高,所以建议使用RGB565的显示,以
jlt35031c显示屏为例,他的显示驱动芯片是ST7789v,设置显示格式的方式是往3a寄存器写入0x55(RGB565)或者0x66(RGB666),在R128SDK中,已经把jlt35031c的通讯格式写死为0x55,lcd_pixel_fmt配置选项无效:sunxi_lcd_cmd_write(sel, 0x3a); sunxi_lcd_para_write(sel, 0x55);在例程中,输入的数据是
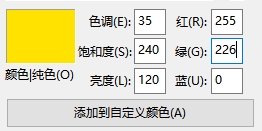
0xff,0x00,0xff,0x00,对于SPI接口,是按字节发送。实际上,例程只需要每次发送2字节即可,因为前后发送的都是相同的ff 00,所以没有看出问题。根据对
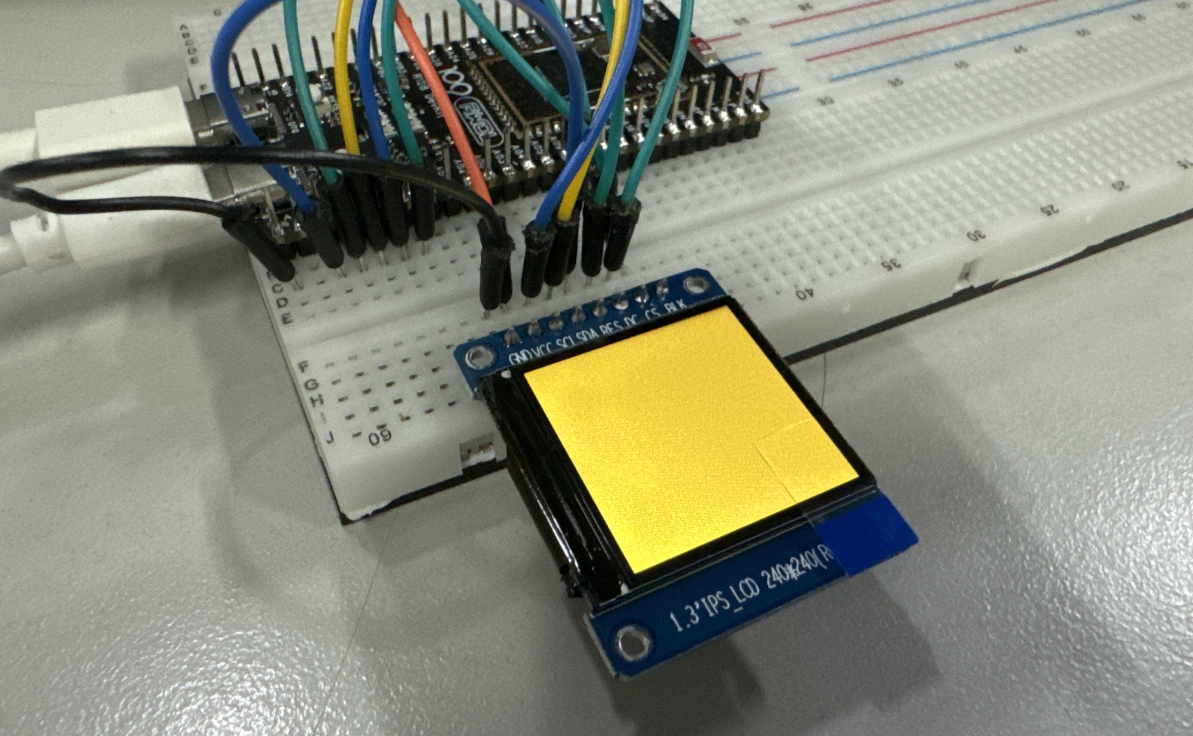
565的数据解析,我们拆分ff 00就可以得到红色分量是0b11111,也就是31,绿色是0b111000,也就是56,,蓝色是0.我们等效转换成RGB888,有:R = 31/31*255 = 255 G = 56/63*255 = 226在调色板输入对应颜色,就可以得到黄色
因为
DBI通讯效率较高,所以可以使用RGB565或者RGB666,使用DBI接口,也就是lcd_if设置为1时,驱动会根据lcd_pixel_fmt配置寄存器,以SDK中的kld2844b.c为例,这显示屏的显示驱动也是ST7789,但是不同的屏幕,厂家封装时已经限制了通讯方式,所以即使是能使用 DBI 接口的驱动芯片的屏幕,或许也用不了DBI。sunxi_lcd_cmd_write(sel, 0x3A); /* Interface Pixel Format */ /* 55----RGB565;66---RGB666 */ if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_RGB_565 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGR_565) { sunxi_lcd_para_write(sel, 0x55); if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_RGB_565) rotate &= 0xf7; else rotate |= 0x08; } else if (info[sel].lcd_pixel_fmt < LCDFB_FORMAT_RGB_888) { sunxi_lcd_para_write(sel, 0x66); if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGRA_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGRX_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_ABGR_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_XBGR_8888) { rotate |= 0x08; } } else { sunxi_lcd_para_write(sel, 0x66); }对于 DBI 格式,不再是以字节的形式去解析,而是以字的方式去解析,为了统一,软件已经规定了,
RGB565格式时,字大小是2字节,也就是16位,而RGB666格式时,字大小是4字节,也就是32位。对于
RGB565格式,同样是设置为0xff,0x00。因为屏幕是大端,而芯片存储方式是小端,所以芯片的 DBI 模块,会自动把数据从新排列,也就是实际上 DBI 发送数据时,会先发送0x00,再发送0xff,也就是红色分量为0,绿色分量为0b000111,也就是7,蓝色分量是0x11111,也就是31,我们同样转换成RGB888G = 7/63*255 = 28 B= 31/31*255 = 255在调色板上输入,可以得到蓝色。
如果是
RGB666,虽然占用的是3个字节,但是没有CPU是3字节对齐的,所以需要一次性输入4字节,然后 DBI 硬件模块,会自动舍弃1个字节,软件同意舍弃了最后一个字节。依旧以例程为例,例程输入了
0xff,0x00,0xff,0x00,为了方便说明,标准为0xff(1),0x00(1),0xff(2),0x00(2),其中0x00(2)会被舍弃掉,然后发送顺序是0xff(2),0x00(1),0xff(1),也就是0xff(2)是红色分量,0xff(1)是蓝色分量,混合可以得到紫色。
-
【R128】基础组件开发指南——显示与屏幕驱动发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
显示与屏幕驱动
RTOS 提供了一套完整的屏幕驱动,支持 RGB, i8080, SPI, DBI 格式的屏幕。
(1)RGB 接口
RGB接口在全志平台又称HV接口(Horizontal同步和Vertical同步)。有些LCD屏支持高级的功能比如 gamma,像素格式的设置等,但是 RGB 协议本身不支持图像数据之外的传输,所以无法通过 RGB 管脚进行对 LCD 屏进行配置,所以拿到一款 RGB 接口屏,要么不需要初始化命令,要么这个屏会提供额外的管脚给 SoC 来进行配置,比如 SPI 和 I2C 等。RGB 屏幕有许多格式,不同的位宽,不同的时钟周期。下表是位宽与时钟周期的区别。
位宽 时钟周期数 颜色数量和格式 并行\串行 RGB 24 bits 1 cycle 16.7M colors, RGB888 并行 18 bits 1 cycle 262K colors, RGB666 并行 16 bits 1 cycle 65K colors, RGB565 并行 6 bits 3 cycles 262K colors, RGB666 串行 6 bits 3 cycles 65K colors, RGB565 串行 串行 RGB 是相对于并行 RGB 来说,而并不是说它只用一根线来发数据,只要通过多个时钟周期才能把一个像素的数据发完,那么这样的 RGB 接口就是串行 RGB。
(2)I8080 屏幕
Intel 8080 接口屏(又称 MCU 接口),很老的协议,一般用在分辨率很小的屏上。
管脚的控制脚有6种:
- CS 片选信号,决定该芯片是否工作.
- RS 寄存器选择信号,低表示选择 index 或者 status 寄存器,高表示选择控制寄存器。实际场景中一般接SoC的LCD_DE脚(数据使能脚)
- WR (低表示写数据) 数据命令区分信号,也就是写时钟信号,一般接 SoC 的 LCD_CLK 脚
- RD (低表示读数据)数据读信号,也就是读时钟信号,一般接 SoC 的 LCD_HSYNC 脚
- RESET 复位LCD( 用固定命令系列 0 1 0来复位)
- Data 是双向的数据通路
I8080 根据的数据位宽接口有 8/9/16/18,连哪些脚参考,即使位宽一样,连的管脚也不一样,还要考虑的因素是 RGB 格式。
- RGB565,总共有 65K 这么多种颜色
- RGB666,总共有 262K 那么多种颜色
- 9bit 固定为 262K
(3)SPI 屏幕
SPI LCD 是使用 SPI 总线传输图像数据的屏幕,只会出现在很低分辨率的屏幕上。一般来说开屏前都需要初始化操作。
适配 LCD 屏幕的步骤
- 确保全志显示框架的内核配置有使能
- 前期准备以下资料和信息:
- 屏手册。主要是描述屏基本信息和电气特性等,向屏厂索要。
- Driver IC 手册。主要是描述屏 IC 的详细信息。这里主要是对各个命令进行详解,对我们进行初始化定制有用,向屏厂索要。
- 屏时序信息。请向屏厂索要。
- 屏初始化代码,请向屏厂索要。一般情况下 DSI 和 I8080 屏等都需要初始化命令对屏进行初始化。
- 万用表。调屏避免不了测量相关电压。
- 通过第2步屏厂提供的资料,定位该屏的类型,然后选择一个已有同样类型的屏驱动作为模板进行屏驱动添加或者直接在上面修改。
- 修改屏驱动目录下的
panel.c和panel.h。在全局结构体变量panel_array中新增刚才添加strcut __lcd_panel的变量指针。panel.h中新增strcut __lcd_panel的声明。 - 修改 Makefile。在 lcd 屏驱动目录的上一级的
Makefile文件中的disp-objs中新增刚才添加屏驱动.o - 修改
sys_config.fex中的lcd0节点。 - 编译测试
LCD 屏幕驱动源码
LCD 屏幕驱动源码结构
. ├── Kconfig ├── Makefile ├── disp │ ├── Kconfig │ ├── Makefile │ ├── de # Display Engine 层驱动,包括图层与显示控制 │ │ ├── Makefile │ │ ├── bsp_display.h │ │ ├── disp_capture.c │ │ ├── disp_capture.h │ │ ├── disp_device.c │ │ ├── disp_device.h │ │ ├── disp_display.c │ │ ├── disp_display.h │ │ ├── disp_enhance.c │ │ ├── disp_enhance.h │ │ ├── disp_features.c │ │ ├── disp_features.h │ │ ├── disp_hdmi.c │ │ ├── disp_hdmi.h │ │ ├── disp_lcd.c │ │ ├── disp_lcd.h │ │ ├── disp_manager.c │ │ ├── disp_manager.h │ │ ├── disp_private.c │ │ ├── disp_private.h │ │ ├── disp_smart_backlight.c │ │ ├── disp_smart_backlight.h │ │ ├── disp_tv.c │ │ ├── disp_tv.h │ │ ├── disp_vdevice.c │ │ ├── disp_vdevice.h │ │ ├── include.h │ │ └── lowlevel_v2x # DISP 底层驱动,硬件寄存器交互 │ │ ├── Makefile │ │ ├── de_ase.c │ │ ├── de_ase_type.h │ │ ├── de_bws.c │ │ ├── de_bws_type.h │ │ ├── de_ccsc.c │ │ ├── de_clock.c │ │ ├── de_clock.h │ │ ├── de_csc.h │ │ ├── de_csc_type.h │ │ ├── de_dcsc.c │ │ ├── de_dsi.c │ │ ├── de_dsi.h │ │ ├── de_dsi_28.c │ │ ├── de_dsi_type.h │ │ ├── de_dsi_type_28.h │ │ ├── de_eink.c │ │ ├── de_eink.h │ │ ├── de_enhance.c │ │ ├── de_enhance.h │ │ ├── de_fcc.c │ │ ├── de_fcc_type.h │ │ ├── de_fce.c │ │ ├── de_fce_type.h │ │ ├── de_feat.c │ │ ├── de_feat.h │ │ ├── de_gsu.c │ │ ├── de_gsu_type.h │ │ ├── de_hal.c │ │ ├── de_hal.h │ │ ├── de_lcd.c │ │ ├── de_lcd.h │ │ ├── de_lcd_sun50iw10.c │ │ ├── de_lcd_type.h │ │ ├── de_lti.c │ │ ├── de_lti_type.h │ │ ├── de_peak.c │ │ ├── de_peak_type.h │ │ ├── de_rtmx.c │ │ ├── de_rtmx.h │ │ ├── de_rtmx_type.h │ │ ├── de_scaler.h │ │ ├── de_scaler_table.c │ │ ├── de_scaler_table.h │ │ ├── de_smbl.c │ │ ├── de_smbl.h │ │ ├── de_smbl_tab.h │ │ ├── de_smbl_type.h │ │ ├── de_vep.h │ │ ├── de_vep_table.c │ │ ├── de_vep_table.h │ │ ├── de_vsu.c │ │ ├── de_vsu_type.h │ │ ├── de_wb.c │ │ ├── de_wb.h │ │ ├── de_wb_type.h │ │ ├── disp_al.c │ │ ├── disp_al.h │ │ ├── disp_eink_data.c │ │ ├── disp_eink_data.h │ │ ├── disp_waveform.c │ │ ├── disp_waveform.h │ │ ├── rtmx_eink.c │ │ └── rtmx_eink.h │ ├── dev_disp.c # DISP 公共端口 │ ├── dev_disp.h │ ├── disp_debug.c │ ├── disp_debug.h │ ├── disp_sys_intf.c │ ├── disp_sys_intf.h │ ├── lcd # LCD 面板驱动,包括自定义初始化控制,上下电时序控制 │ │ ├── Kconfig │ │ ├── S6D7AA0X01.c │ │ ├── S6D7AA0X01.h │ │ ├── VVX07H005A10.c │ │ ├── VVX07H005A10.h │ │ ├── WilliamLcd.c │ │ ├── WilliamLcd.h │ │ ├── b080uan01_mipi1200x1920.c │ │ ├── b080uan01_mipi1200x1920.h │ │ ├── cl40bc1019_cpu.c │ │ ├── cl40bc1019_cpu.h │ │ ├── cpu_gg1p4062utsw.c │ │ ├── cpu_gg1p4062utsw.h │ │ ├── default_eink.c │ │ ├── default_eink.h │ │ ├── default_panel.c │ │ ├── default_panel.h │ └── wtq05027d01.h ├── soc # SoC 层特化驱动 │ ├── Kconfig │ ├── Makefile │ ├── VVX07H005A10_mipi_config.c │ ├── disp_board_config.c │ ├── disp_board_config.h │ ├── he0801a068_mipi_config.c │ ├── platform_resource.c │ ├── platform_resource.h │ ├── sun20iw2.c └── tv # TV 驱动,R128不使用 ├── Makefile ├── de_tve_sun8iw11.c ├── de_tve_sun8iw7.c ├── de_tve_v1.c ├── de_tvec.h ├── drv_tv.c ├── drv_tv.h ├── gm7121.c ├── tv_ac200.c ├── tv_ac200.h ├── tv_ac200_lowlevel.c └── tv_ac200_lowlevel.h屏驱动源码位置
RGB 面板驱动
对于不需要初始化的 RGB 屏幕(一般是 40PIN,50PIN)使用
default_panel.clichee/rtos‑hal/hal/source/disp2/disp/lcd/default_panel.cLCD 面板特化驱动
部分 LCD 面板需要写 IIC,SPI初始化,或者有特殊的上下电要求,需要编写特化的屏幕驱动
lichee/rtos‑hal/hal/source/disp2/disp/lcd/配置文件
其中 “芯片型号” 例如 r128s3,和 “板子名称” 例如 pro,请根据实际替换。
board/芯片型号/板子名称/configs/屏幕驱动配置
lcd 相关代码包含在 disp 驱动模块中,执行命令进入 menuconfig 配置主界面,并按以下步骤操作:
添加新屏
添加一款新屏幕通常需要以下步骤:
panel.c和panel.h,当用户添加新屏驱动时,是需要修改这两个文件的,需要将屏结构体变量添加到全局结构体变量panel_array中。lcd_source.c和lcd_source.h,这两个文件实现的是给屏驱动使用的函数接口,比如电源开关,gpio,dsi 读写接口等,用户不需要修改只需要用。- 屏驱动。除了上面提到的源文件外,其它的一般一个 c 文件和一个 h 文件就代表一个屏驱动。
- 在屏驱动源码位置的上一级,有用户需要修改的
Makefile文件。
我们可以打开
lichee/rtos‑hal/hal/source/disp2/disp/lcd/default_panel.c作为屏驱动的例子,在该文件的最后:struct __lcd_panel default_panel = { /* panel driver name, must mach the lcd_drv_name in sys_config.fex */ .name = "default_lcd", .func = { .cfg_panel_info = LCD_cfg_panel_info, .cfg_open_flow = LCD_open_flow, .cfg_close_flow = LCD_close_flow, }, };-
该全局变量
default_panel的成员name与lcd_driver_name必须一致,这个关系到驱动能否找到指定的文件。 -
接 下 来 是
func成 员 的 初 始 化, 这 里 最 主 要 实 现 三 个 回 调 函 数。LCD_cfg_panel_info,LCD_open_flow和LCD_close_flow。 -
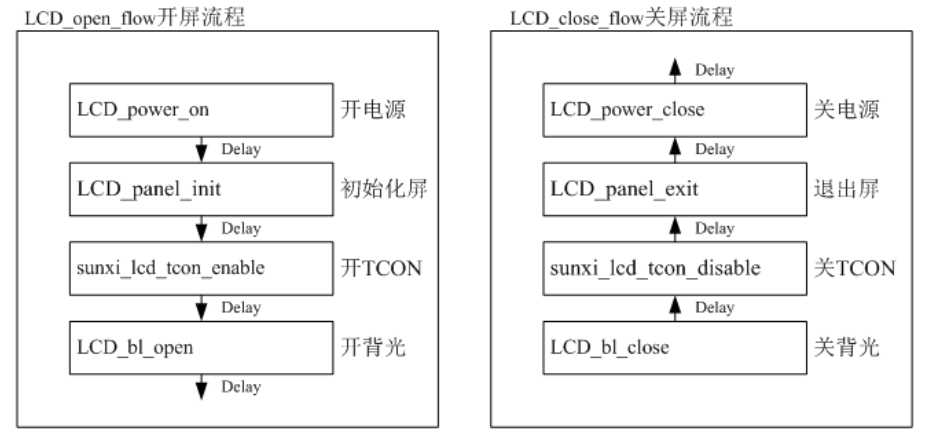
开关屏流程即屏上下电流程,屏手册或者 driver IC 手册中里面的 Power on Sequence 和 Power off Sequence。用于开关屏的操作流程如下图所示
- 其中,
LCD_open_flow和LCD_close_flow称为开关屏流程函数。方框中的函数,如LCD_power_on,称为开关屏步骤函数。 - 不需要进行初始化操作的 LCD 屏,例如部分 RGB 屏等,
LCD_panel_init及LCD_panel_exit这些函数可以为空。
LCD_open_flow
LCD_open_flow 函数只会在系统初始化的时候调用一次,执行每个 LCD_OPEN_FUNC 即是把对应的开屏步骤函数进行注册,先注册先执行,但并没有立刻执行该开屏步骤函数。
函数原型:
static __s32 LCD_open_flow(__u32 sel)函数常用内容为:
static __s32 LCD_open_flow(__u32 sel) { LCD_OPEN_FUNC(sel, LCD_power_on,10); LCD_OPEN_FUNC(sel, LCD_panel_init, 50); LCD_OPEN_FUNC(sel, sunxi_lcd_tcon_enable, 100); LCD_OPEN_FUNC(sel, LCD_bl_open, 0); return 0; }如上,调用四次 LCD_OPEN_FUNC 注册了四个回调函数,对应了四个开屏流程, 先注册先执行。实际上注册多少个函数是用户自己的自由,只要合理即可。
- LCD_power_on 即打开 LCD 电源,再延迟 10ms;这个步骤一般用于打开 LCD 相关电源和相关管脚比如复位脚。这里一般是使用电源控制函数说明和管脚控制函数说明进行操作。
- LCD_panel_init 即初始化屏,再延迟 50ms;不需要初始化的屏,可省掉此步骤,这个函数一般用于发送初始化命令给屏进行屏初始化。如果是 I8080 屏用I8080 接口函数说明,如果是其它情况比如 i2c 或者 spi 可以看使用 iic/spi 串行接口初始化,也可以用 GPIO 来进行模拟。
- sunxi_lcd_tcon_enable 打开 TCON,再延迟 100ms;这一步是固定的,表示开始发送图像信号。
- LCD_bl_open 打开背光,再延迟 0ms。前面三步搞定之后才开背光,这样不会看到闪烁。这里一般使用的函数请看背光控制函数说明。
LCD_OPEN_FUNC
注册开屏步骤函数到开屏流程中,记住这里是注册不是执行!
函数原型:
void LCD_OPEN_FUNC(__u32 sel, LCD_FUNC func, __u32 delay)参数说明:
func是一个函数指针,其类型是:void (*LCD_FUNC) (__u32 sel),用户自己定义的函数必须也要用统一的形式。比如:void user_defined_func(__u32 sel) { // do something }delay是执行该步骤后,再延迟的时间,时间单位是毫秒。LCD_OPEN_FUNC 的第二个参数是前后两个步骤的延时长度,单位 ms,注意这里的数值请按照屏手册规定去填,乱填可能导致屏初始化异常或者开关屏时间过长,影响用户体验。
LCD_close_flow
与
LCD_open_flow对应的是LCD_close_flow,它用于注册关屏函数。使用LCD_CLOSE_FUNC进行函数注册,先注册先执行。这里只是注册回调函数,不是立刻执行。static s32 LCD_close_flow(u32 sel) { /* close lcd backlight, and delay 0ms */ LCD_CLOSE_FUNC(sel, LCD_bl_close, 0); /* close lcd controller, and delay 0ms */ LCD_CLOSE_FUNC(sel, sunxi_lcd_tcon_disable, 50); /* open lcd power, than delay 200ms */ LCD_CLOSE_FUNC(sel, LCD_panel_exit, 100); /* close lcd power, and delay 500ms */ LCD_CLOSE_FUNC(sel, LCD_power_off, 0); return 0; }- 先关闭背光,这样整个关屏过程,用户不会看到闪烁的过程;
- 关闭 TCON(即停止发送数据)再延迟 50ms;
- 执行关屏代码,再延迟 200ms;(不需要初始化的屏,可省掉此步骤)
- 最后关闭电源,再延迟 0ms。
LCD_cfg_panel_info
配置的 TCON 扩展参数,比如 gamma 功能和颜色映射功能。
函数原型:
static void LCD_cfg_panel_info(__panel_extend_para_t *info)TCON 的扩展参数只能在屏文件中配置,参数的定义:
lcd_frm
Lcd Frame Rate Modulator, FRM 是解决由于 PIN 减少导致的色深问题,有些 LCD 屏的像素格式是 18bit 色深(RGB666)或 16bit 色深(RGB565),建议打开 FRM 功能,通过 dither 的方式弥补色深,使显示达到 24bit 色深(RGB888)的效果。如下图所示,上图是色深为 RGB66 的 LCD 屏显示,下图是打开 dither 后的显示,打开 dither 后色彩渐变的地方过度平滑。
参数设置相应值对应含义为:
0:RGB888 ‑‑ RGB888 direct 1:RGB888 ‑‑ RGB666 dither 2:RGB888 ‑‑ RGB565 dither
lcd_gamma_en
Lcd Gamma Correction Enable,设置相应值的对应含义为:
0:LCD 的 Gamma 校正功能关闭 1:LCD 的 Gamma 校正功能开启设置为 1 时,需要在屏驱动中对
lcd_gamma_tbl[256]进行赋值。lcd_cmap_en
Lcd Color Map Enable, 设置为 1 时,需要对
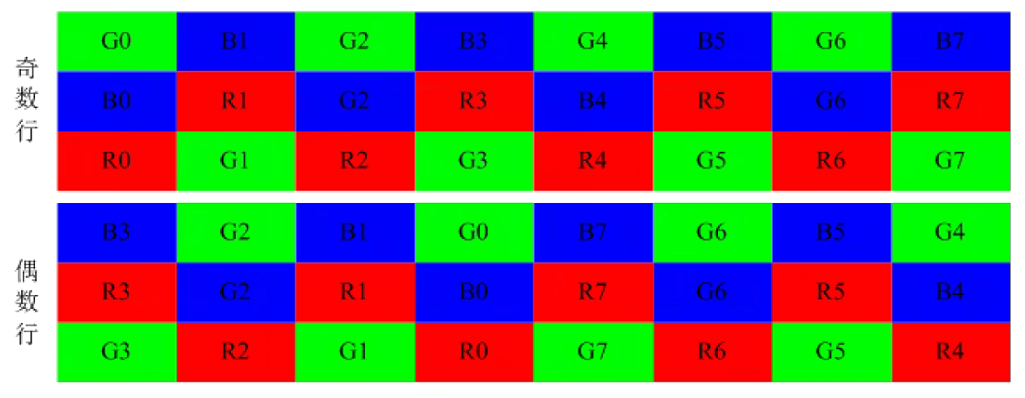
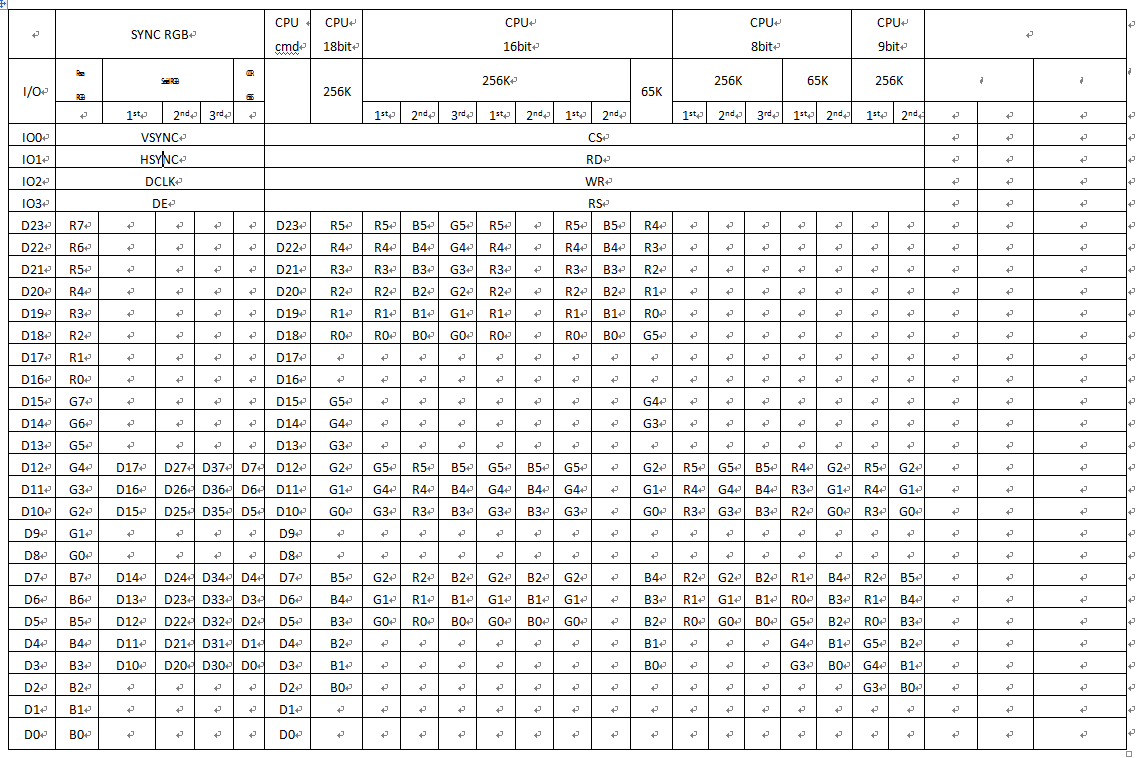
lcd_cmap_tbl [2][3][4]进行赋值Lcd Color Map Table。每个像素有 R、G、B 三个单元,每四个像素组成一个选择项,总共有 12 个可选。数组第一维表示奇偶行,第二维表示像素的 RGB,第三维表示第几个像素,数组的内容即表示该位置映射到的内容。
LCD CMAP 是对像素的映射输出功能,只有像素有特殊排布的 LCD 屏才需要配置。
LCD CMAP 定义每行的 4 个像素为一个总单元,每个像素分 R、G、B 3 个小单元,总共有 12 个小单元。通过 lcd_cmap_tbl 定义映射关系,输出的每个小单元可随意映射到 12 个小单元之一。
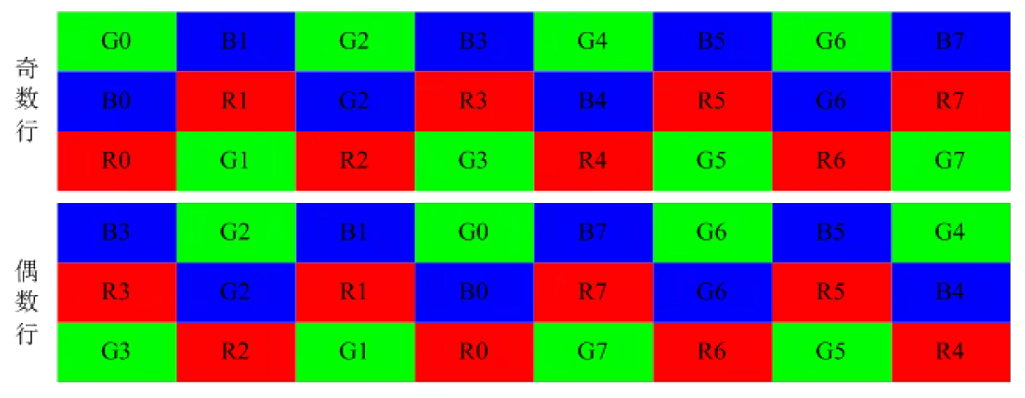
__u32 lcd_cmap_tbl[2][3][4] = { { {LCD_CMAP_G0,LCD_CMAP_B1,LCD_CMAP_G2,LCD_CMAP_B3}, {LCD_CMAP_B0,LCD_CMAP_R1,LCD_CMAP_B2,LCD_CMAP_R3}, {LCD_CMAP_R0,LCD_CMAP_G1,LCD_CMAP_R2,LCD_CMAP_G3}, }, { {LCD_CMAP_B3,LCD_CMAP_G2,LCD_CMAP_B1,LCD_CMAP_G0}, {LCD_CMAP_R3,LCD_CMAP_B2,LCD_CMAP_R1,LCD_CMAP_B0}, {LCD_CMAP_G3,LCD_CMAP_R2,LCD_CMAP_G1,LCD_CMAP_R0}, }, };如上,上三行代表奇数行的像素排布,下三行代表偶数行的像素排布;
每四个像素为一个单元,第一列代表每四个像素的第一个像素映射,第二列代表每四个像素的第二个像素映射,以此类推。
如上的定义,像素的输出格式如下图所示。
lcd_rb_swap
调换
TCON模块RGB中的 R 分量和 B 分量。0:不变 1:调换R分量和B分量需要 gamma 校正,或色彩映射,在
sys_config.fex中将相应模块的enable参数置 1,lcd_gamma_en,lcd_cmap_en,并且填充 3 个系数表,lcd_gamma_tbl,lcd_cmap_tbl,注意的是:gamma,模板提供了 18 段拐点值,然后再插值出所有的值(255 个)。可以往相应表格内添加子项以补充细节部分。cmap_tbl 的大小是固定的,不能减小或增加表的大小。最终生成的 gamma 表项是由 rgb 三个 gamma 值组成的,各占 8bit。目前提供的模板中,三个 gamma 值是相同的。延时函数
函数原型
(毫秒级别)
s32 sunxi_lcd_delay_ms(u32 ms)(微秒级别)
s32 sunxi_lcd_delay_us(u32 us)图像数据使能函数
打开 LCD 控制器,开始刷新 LCD 显示
void sunxi_lcd_tcon_enable(u32 screen_id)关闭 LCD 控制器,停止刷新数据
void sunxi_lcd_tcon_disable(u32 screen_id)背光控制函数
打开背光,操作的是
sys_config.fex中lcd_bl配置的gpio。void sunxi_lcd_backlight_enable(u32 screen_id)关闭背光,操作的是
sys_config.fex中lcd_bl配置的gpio。void sunxi_lcd_backlight_disable(u32 screen_id)打开PWM背光,打开时 pwm 将往外输出 pwm 波形。对应的是
lcd_pwm_ch所对应的那一路 pwm。s32 sunxi_lcd_pwm_enable(u32 screen_id)关闭PWM背光,打开时 pwm 将往外输出 pwm 波形。对应的是
lcd_pwm_ch所对应的那一路 pwm。s32 sunxi_lcd_pwm_disable(u32 screen_id)电源控制函数
打开
Lcd电源,操作的是sys_config.fex中的lcd_power/lcd_power1/lcd_power2。(pwr_id标识电源索引)void sunxi_lcd_power_enable(u32 screen_id, u32 pwr_id)关闭
Lcd电源,操作的是sys_config.fex中的lcd_power/lcd_power1/lcd_power2。(pwr_id标识电源索引)void sunxi_lcd_power_disable(u32 screen_id, u32 pwr_id)-
pwr_id = 0:对应于 sys_config.fex 中的 lcd_power。
-
pwr_id = 1:对应于 sys_config.fex 中的 lcd_power1。
-
pwr_id = 2:对应于 sys_config.fex 中的 lcd_power2。
-
pwr_id = 3:对应于 sys_config.fex 中的 lcd_power3。
sunxi_lcd_pin_cfg
配置 lcd 的 io
函数原型
s32 sunxi_lcd_pin_cfg(u32 screen_id, u32 bon)配置
lcd的data/clk等pin,对应sys_config.fex中的lcdd0‑lcdd23/lcddclk/lcdde/lcdhsync/lcdvsync。参数:
- Bon: 1: 为开,0:为配置成 disable 状态。
I8080 接口函数说明
显示驱动提供 5 个接口函数可供使用。如下:
sunxi_lcd_cpu_write
设定 CPU 屏的指定寄存器为指定的值。
函数原型
void sunxi_lcd_cpu_write(__u32 sel, __u32 index, __u32 data) { sunxi_lcd_cpu_write_index(sel, index); sunxi_lcd_cpu_wirte_data(sel, data); }实现了 8080 总线上的两个写操作
sunxi_lcd_cpu_write_index实现第一个写操作,这时 PIN 脚 RS(A1)为低电平,总线数据上的数据内容为参数 index 的值。sunxi_lcd_cpu_wirte_data实现第二个写操作,这时 PIN 脚 RS(A1)为高电平,总线数据上的数据内容为参数 data 的值。
sunxi_lcd_cpu_write_index
设定 CPU 屏为指定寄存器。
void sunxi_lcd_cpu_write_index(__u32 sel,__u32 index)参数:
- sel:显示屏 id
- index: 要设定的寄存器
sunxi_lcd_cpu_write_data
设定 CPU 屏寄存器的值为指定的值
void sunxi_lcd_cpu_write_data(__u32 sel, __u32 data)参数:
- sel:显示屏 id
- index: 要设定的寄存器的值
tcon0_cpu_rd_24b_data
读操作
s32 tcon0_cpu_rd_24b_data(u32 sel, u32 index, u32 *data, u32 size)参数:
- sel:显示屏 id
- index: 要读取的寄存器
- data:用于存放读取接口的数组指针,用户必须保证其有足够空间存放数据
- size:要读取的字节数
管脚控制函数
sunxi_lcd_gpio_set_value
LCD_GPIO PIN 脚上输出高电平或低电平
s32 sunxi_lcd_gpio_set_value(u32 screen_id, u32 io_index, u32 value)参数:
- io_index = 0:对应于 sys_config.fex 中的 lcd_gpio_0。
- io_index = 1:对应于 sys_config.fex 中的 lcd_gpio_1。
- io_index = 2:对应于 sys_config.fex 中的 lcd_gpio_2。
- io_index = 3:对应于 sys_config.fex 中的 lcd_gpio_3。
- value = 0:对应 IO 输出低电平。
- value = 1:对应 IO 输出高电平。
只用于该 GPIO 定义为输出的情形。
sunxi_lcd_gpio_set_direction
设置 LCD_GPIO PIN 脚为输入或输出模式
s32 sunxi_lcd_gpio_set_direction(u32 screen_id, u32 io_index, u32 direction)参数:
- io_index = 0:对应于 sys_config.fex 中的 lcd_gpio_0。
- io_index = 1:对应于 sys_config.fex 中的 lcd_gpio_1。
- io_index = 2:对应于 sys_config.fex 中的 lcd_gpio_2。
- io_index = 3:对应于 sys_config.fex 中的 lcd_gpio_3。
- direction = 0:对应 IO 设置为输入。
- direction = 1:对应 IO 设置为输出。
一部分屏需要进行初始化操作,在开屏步骤函数中,对应于
LCD_panel_init函数,提供了几种方式对屏的初始化。对于 CPU 屏,是通过 8080 总线的方式,使用的是 LCDIO(PD,PH)进行初始化。这种初始化方式,其总线的引脚位置定义与 CPU 屏一致。对于 SPI/IIC 初始化的 LCD,使用独立的IO初始化。使用 SPI 初始化
一般使用 GPIO 模拟的方式初始化 SPI 屏幕,其中 SPI 模拟如下所示
#define spi_scl_1 sunxi_lcd_gpio_set_value(0, 3, 1) // 配置 lcd_gpio_3 为 SCL #define spi_scl_0 sunxi_lcd_gpio_set_value(0, 3, 0) #define spi_sdi_1 sunxi_lcd_gpio_set_value(0, 2, 1) // 配置 lcd_gpio_2 为 SDI #define spi_sdi_0 sunxi_lcd_gpio_set_value(0, 2, 0) #define spi_cs_1 sunxi_lcd_gpio_set_value(0, 1, 1) // 配置 lcd_gpio_1 为 CS #define spi_cs_0 sunxi_lcd_gpio_set_value(0, 1, 0) static void spi_write_cmd(u8 value) { int i; spi_cs_0; spi_scl_0; spi_sdi_0; spi_scl_1; spi_scl_0; for (i = 0; i < 8; i++) { if (value & 0x80) spi_sdi_1; else spi_sdi_0; value <<= 1; spi_scl_1; spi_scl_0; } spi_cs_1; } static void spi_write_data(u8 value) { int i; spi_cs_0; spi_scl_0; spi_sdi_1; spi_scl_1; spi_scl_0; for (i = 0; i < 8; i++) { if (value & 0x80) spi_sdi_1; else spi_sdi_0; value <<= 1; spi_scl_1; spi_scl_0; } spi_cs_1; }然后就可以调用
spi_write_cmd(u8 value)与spi_write_data(u8 value)函数写入初始化命令。也可以使用 硬件 SPI 初始化屏幕,代码如下
static int spi_init(void) { int ret = ‑1; struct spi_master *master; master = spi_busnum_to_master(1); if (!master) { lcd_fb_wrn("fail to get master\n"); goto OUT } spi_device = spi_alloc_device(master); if (!spi_device) { lcd_fb_wrn("fail to get spi device\n"); goto OUT; } spi_device‑> bits_per_word = 8; spi_device‑> max_speed_hz = 50000000; /*50MHz*/ spi_device‑> mode = SPI_MODE_0; ret = spi_setup(spi_device); if (ret) { lcd_fb_wrn("Faile to setup spi\n"); goto FREE; } lcd_fb_inf("Init spi1:bits_per_word:%d max_speed_hz:%d mode:%d\n", spi_device‑> bits_per_word, spi_device‑> max_speed_hz, spi_device‑> mode); ret = 0; goto OUT; FREE: spi_master_put(master); kfree(spi_device); spi_device = NULL; OUT: return ret; } static int comm_out(unsigned int sel, unsigned char cmd) { struct spi_transfer t; if (!spi_device) return ‑1; DC(sel, 0); memset(&t, 0, sizeof(struct spi_transfer)); t.tx_buf = &cmd; t.len = 1; t.bits_per_word = 8; t.speed_hz = 24000000; return spi_sync_transfer(spi_device, &t, 1); }首先调用
spi_init函数对spi硬件进行初始化,spi_init函数可以分为几个步骤,第一获取master;根据实际的硬件连接,选择spi(代码中选择了spi1),如果这一步返回错误说spi没有配置好。第二步设置spi device,这里包括最大速度,spi传输模式,以及每个字包含的比特数。最后调用spi_setup完成master和device的关联。comm_out是一个spi传输的例子,核心就是spi_sync_transfer函数。并行 RGB 接口
当我们配置并行 RGB 接口时,在配置里面并不需要区分是 24 位,18 位和 16 位,最大位宽是哪种是参考 pin mux 表格,如果 LCD 屏本身支持的位宽比 SoC 支持的位宽少,当然只能选择少的一方。
因为不需要初始化,RGB 接口极少出现问题,重点关注 lcd 的 timing 的合理性,也就是lcd_ht,lcd_hspw,lcd_hbp,lcd_vt,lcd_vspw 和 lcd_vbp 这个属性的合理性。
下面是典型并行 RGB 接口 sys_config.fex 配置示例,其中用空行把配置分成几个部分
;-------------------------------------------------- ;Parallel RGB LCD ;-------------------------------------------------- [lcd0] ; Part 1 lcd_used = 1 lcd_driver_name = "default_lcd" ; Part 2 lcd_if = 0 ; Part 3 lcd_x = 480 lcd_y = 480 lcd_width = 150 lcd_height = 94 lcd_rb_swap = 0 lcd_dclk_freq = 21 lcd_hv_clk_phase = 1 ; Part 4 lcd_backlight = 150 lcd_pwm_used = 1 lcd_pwm_ch = 5 lcd_pwm_freq = 5000 lcd_pwm_pol = 1 ; Part 5 lcd_hbp = 80 lcd_ht = 648 lcd_hspw = 8 lcd_vbp = 10 lcd_vt = 522 lcd_vspw = 2 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 1 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 deu_mode = 0 lcdgamma4iep = 22 smart_color = 90 ; Part 6 ;LCD_D2-LCD_D7 lcd_gpio_4 = port:PA00<8><0><3><0> lcd_gpio_5 = port:PA01<8><0><3><0> lcd_gpio_6 = port:PA02<8><0><3><0> lcd_gpio_7 = port:PA03<8><0><3><0> lcd_gpio_8 = port:PA04<8><0><3><0> lcd_gpio_9 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D15 lcd_gpio_10 = port:PA11<8><0><3><0> lcd_gpio_11 = port:PA10<8><0><3><0> lcd_gpio_12 = port:PA08<8><0><3><0> lcd_gpio_13 = port:PA07<8><0><3><0> lcd_gpio_14 = port:PA06<8><0><3><0> lcd_gpio_15 = port:PA09<8><0><3><0> ;LCD_D18-LCD_D23 lcd_gpio_16 = port:PA12<8><0><3><0> lcd_gpio_17 = port:PA13<8><0><3><0> lcd_gpio_18 = port:PA14<8><0><3><0> lcd_gpio_19 = port:PA15<8><0><3><0> lcd_gpio_20 = port:PB03<8><0><3><0> lcd_gpio_21 = port:PB02<8><0><3><0> ;LCD_VSYNC, LCD_HSYNC, LCD_DCLK, LCD_DE lcd_gpio_0 = port:PA18<8><0><3><0> lcd_gpio_1 = port:PA19<8><0><3><0> lcd_gpio_2 = port:PA20<8><0><3><0> lcd_gpio_3 = port:PA21<8><0><3><0>- 第一部分,决定该配置是否使用,以及使用哪个屏驱动,lcd_driver_name 决定了用哪个屏驱动来初始化,这里是 default_lcd,是针对不需要初始化设置的 RGB 屏。
- 第二部分决定下面的配置是一个并行 RGB 的配置。
- 第三部分决定 SoC 中的 LCD 模块发送时序。请查看屏时序参数说明。
- 第四部分决定背光(pwm 和 lcd_bl_en)。请看背光相关参数。
- 第五部分是显示效果部分的配置,如果非 24 位的 RGB,那么一般情况下需要设置lcd_frm。
- 第六部分就是电源和管脚配置。是用 RGB666 还是 RGB888,需要根据实际 pinmux 表来决定,如果该芯片只有 18 根 rgb 数据则只能 rgb18。请看电源和管脚参数。
串行 RGB 接口
串行 RGB 是相对于并行 RGB 来说,而并不是说它只用一根线来发数据,只要通过多个时钟周期才能把一个像素的数据发完,那么这样的 RGB 接口就是串行 RGB。
同样与并行 RGB 接口一样,配置中并不需要也无法体现具体是哪种串行 RGB 接口,你要做的就是把硬件连接对就行。
这里需要注意的是,对于该接口,SoC 总共需要三个周期才能发完一个 pixel,所以我们配置时序的时候,需要满足
lcd_dclk_freq*3=lcd_ht*lcd_vt60,或者lcd_dclk_freq=lcd_ht/3*lcd_vt*60要么 3 倍lcd_ht要么 3 倍lcd_dclk_freq。I8080 接口
Intel 8080 接口屏 (又称 MCU 接口) 很老的协议,一般用在分辨率很小的屏上
管脚的控制脚有 6 种:
管脚 作用说明 CS 片选信号 决定该芯片是否工作。 RS 寄存器选择信号 低表示选择 index 或者 status 寄存器,高表示选择控制寄存器。实际场景中一般接 SoC 的 LCD_DE 脚(数据使能脚)。 WR 数据命令区分信号 即写时钟信号,一般接 SoC 的 LCD_CLK 脚。(低表示写数据) RD 数据读信号 即读时钟信号,一般接 SoC 的 LCD_HSYNC 脚。(低表示读数据) RESET 复位 LCD(用固定命令系列 0 1 0 来复位) Data 双向数据 I8080 根据 Data 的数据位宽接口有 8/9/16/18,连哪些脚参考,即使位宽一样,连的管脚也不一样,还要考虑的因素是 rgb 格式。
- RGB565,总共有 65K 种颜色
- RGB666,总共有 262K 种颜色。
- 9bit 固定为 262K。
RGB 和 I8080 管脚配置示意图
sys_config 参数说明
LCD 接口参数说明
lcd_driver_name
Lcd 屏驱动的名字(字符串),必须与屏驱动的名字对应。
lcd_model_name
Lcd 屏模型名字,非必须,可以用于同个屏驱动中进一步区分不同屏。
lcd_if
Lcd Interface,设置相应值的对应含义为:
0:HV RGB接口 1:CPU/I80接口lcd_hv_if
Lcd HV panel Interface, 这个参数只有在 lcd_if=0 时才有效。定义 RGB 同步屏下的几种接口类型,设置相应值的对应含义为:
0:Parallel RGB 8:Serial RGB 10:Dummy RGB 11:RGB Dummy 12:Serial YUV (CCIR656)lcd_hv_clk_phase
这个参数只有在 lcd_if=0 时才有效。定义 RGB 同步屏的 clock 与 data 之间的相位关系。总共有 4个相位可供调节,设置相应值的对应含义为:
0: 0 degree 1: 90 degree 2: 180 degree 3: 270 degreelcd_hv_sync_polarity
这个参数只有在 lcd_if=0 时才有效。定义 RGB 同步屏的 hsync 和 vsync 的极性。设置相应值的对应含义为:
0:vsync active low,hsync active low 1:vsync active high,hsync active low 2:vsync active low,hsync active high 3:vsync active high,hsync active highlcd_hv_srgb_seq
这个参数只有在 lcd_if=0 且 lcd_hv_if=8(Serial RGB)时才有效。定义奇数行 RGB 输出的顺序:
0: Odd lines R‑G‑B; Even line R‑G‑B 1: Odd lines B‑R‑G; Even line R‑G‑B 2: Odd lines G‑B‑R; Even line R‑G‑B 4: Odd lines R‑G‑B; Even line B‑R‑G 5: Odd lines B‑R‑G; Even line B‑R‑G 6: Odd lines G‑B‑R; Even line B‑R‑G 8: Odd lines R‑G‑B; Even line B‑R‑G 9: Odd lines B‑R‑G; Even line G‑B‑R 10: Odd lines G‑B‑R; Even line G‑B‑Rlcd_hv_syuv_seq
这个参数只有在 lcd_if=0 且 lcd_hv_if=12(Serial YUV)时才有效。定义 YUV 输出格式:
0:YUYV 1:YVYU 2:UYVY 3:VYUlcd_hv_syuv_fdly
这个参数只有在 lcd_if=0 且 lcd_hv_if=12(Serial YUV)时才有效。定义 CCIR656 编码时 F 相对有效行延迟的行数:
0:F toggle right after active video line 1:Delay 2 lines (CCIR PAL) 2:Delay 3 lines (CCIR NTSC)lcd_cpu_if
这个参数只有在 lcd_if=1 时才有效, 具体时序可参照RGB 和 I8080 管脚配置示意图中 CPU 那几列。设置相应值的对应含义为:
0:18bit/1cycle (RGB666) 2: 16bit/3cycle (RGB666) 4:16bit/2cycle (RGB666) 6:16bit/2cycle (RGB666) 8:16bit/1cycle (RGB565) 10:9bit/1cycle (RGB666) 12:8bit/3cycle (RGB666) 14:8bit/2cycle (RGB565)lcd_cpu_te
设置相应值的对应含义为,设置为 0 时,刷屏间隔时间为 lcd_ht × lcd_vt;设置为 1 或 2 时,刷屏间隔时间为两个 te 脉冲:
0:frame trigged automatically 1:frame trigged by te rising edge 2:frame trigged by te falling edgelcd_cpu_mode
设置相应值的对应含义为,设置为 0 时,刷屏间隔时间为 lcd_ht × lcd_vt;设置为 1 或 2 时,刷屏间隔时间为两个 te 脉冲:
0:中断自动根据时序,由场消隐信号内部触发 1:中断根据数据Block的counter触发或者由外部te触发。屏时序参数说明
下面几个参数对于调屏非常关键,决定了发送端(SoC)发送数据时序。由于涉及到发送端和接收端的调试,除了分辨率和尺寸之外,其它几个数值都不是绝对不变的,两款一样分辨率,同种接口的屏,它们的数值也有可能不一样。
获取途径如下:
- 询问 LCD 屏厂。
- 从屏手册或者 Driver IC 手册中查找(向屏厂索要这些文档)
- 在前面两步都搞不定的情况下,可以根据 vesa 标准来设置,主要是 DMT 和 CVT 标准。
由下面两条公式得知,我们不需要设置
lcd_hfp和lcd_vfp参数,因为驱动会自动根据其它几个已知参数中算出lcd_hfp和lcd_vfp。LCD 时序参数
lcd_x
显示屏的水平像素数量,即屏分辨率中的宽
lcd_y
显示屏的垂直行数,即屏分辨率中的高。
lcd_ht
指一行总的 dclk 的 cycle 个数。
lcd_hbp
指有效行间,行同步信号(hsync)开始,到有效数据开始之间的 dclk 的 cycle 个数,包括同步信号区。包含了 hspw 段,即lcd_hbp=实际的hbp+实际的hspw。
lcd_hspw
指行同步信号的宽度。单位为 1 个 dclk 的时间(即是 1 个 data cycle 的时间)。
lcd_vt
指一场的总行数。
lcd_vbp
指场同步信号(vsync)开始,到有效数据行开始之间的行数,包括场同步信号区。包含了 vspw 段,即 lcd_vbp= 实际的 vbp+ 实际的 vspw。
lcd_vspw
指场同步信号的宽度。单位为行。
lcd_dclk_freq
传输像素传送频率(单位为 MHz)。
fps = (lcd_dclk_freq * 1000 * 1000) / (ht * vt)这个值根据以下公式计算
lcd_dclk_freq = lcd_ht * lcd_vt * fps注意:
- 后面的三个参数都是从屏手册中获得,fps 一般是 60。
- 如果是串行接口,发完一个像素需要 2 到 3 个周期的,那么可以用以下公式计算:
lcd_dclk_freq * cycles = lcd_ht * lcd_vt * fps lcd_dclk_freq = lcd_ht * cycles * lcd_vt * fpslcd_width
此参数描述 lcd 屏幕的物理宽度,单位是 mm,用于计算 dpi。
lcd_height
此参数描述 lcd 屏幕的物理高度,单位是 mm,用于计算 dpi。
背光相关参数
目前用得比较广泛的就是 pwm 背光调节,原理是利用 pwm 脉冲开关产生的高频率闪烁效应,通过调节占空比,达到欺骗人眼,调节亮暗的目的。
lcd_pwm_used
是否使用 pwm,此参数标识用以背光亮度的控制
lcd_pwm_ch
此参数标识使用的 Pwm 通道,这里是指使用 SoC 哪个 pwm 通道,通过查看原理图连接可知。
lcd_pwm_freq
这个参数配置 PWM 信号的频率,单位为 Hz。
- 频率不宜过低否则很容易就会看到闪烁,频率不宜过快否则背光调节效果差。部分屏手册会标明所允许的 pwm 频率范围,请遵循屏手册固定范围进行设置。
- 在低亮度的时候容易看到闪烁,是正常现象,目前已知用上 pwm 的背光都是如此。
lcd_pwm_pol
这个参数配置 PWM 信号的占空比的极性。设置相应值对应含义为:
0:active high 1:active lowlcd_pwm_max_limit
Lcd backlight PWM 最高限制,以亮度值表示。
比如 150,则表示背光最高只能调到 150,0‑255 范围内的亮度值将会被线性映射到 0‑150 范围内。用于控制最高背光亮度,节省功耗
lcd_bl_en
背光使能脚,非必须,看原理图是否有,用于使能或者禁止背光电路的电压。
示例:
lcd_bl_en = port:PD24<1><2><default><1>含义:PD24 输出高电平时打开 LCD 背光;下拉,默认高电平。
- 第一个尖括号:功能分配。1 为输出。
- 第二个尖括号:内置电阻。使用 0 的话,标示内部电阻高阻态,如果是 1 则是内部电阻上拉,2就代表内部电阻下拉。使用 default 的话代表默认状态,即电阻上拉。其它数据无效。
- 第三个尖括号:驱动能力。default 表驱动能力是等级 1。
- 第四个尖括号:电平。0 为低电平,1 为高电平。
需要在屏驱动调用相应的接口进行开、关的控制。
一般来说,高电平是使能,在这个前提下,建议将内阻电阻设置成下拉,防止硬件原因造成的上拉,导致背光提前亮。默认电平填写高电平,这是 uboot 显示过度到内核显示、平滑无闪烁的需要。
lcd_bl_n_percent
背光映射值,n 为 (0‑100)。
此功能是针对亮度非线性的 LCD 屏的,按照配置的亮度曲线方式来调整亮度变化,以使亮度变化更线性。
比如 lcd_bl_50_percent = 60,表明将 50% 的亮度值调整成 60%,即亮度比原来提高 10%。
修改此属性不当可能导致背光调节效果差。
lcd_backlight
背光默认值,0‑255。
此属性决定在 uboot 显示 logo 阶段的亮度,进入都内核时则是读取保存的配置来决定亮度。
显示 logo 阶段,一般来说需要比较亮的亮度,业内做法都是如此。
显示效果相关参数
lcd_frm
Lcd Frame Rate Modulator, FRM 是解决由于 PIN 减少导致的色深问题,有些 LCD 屏的像素格式是 18bit 色深(RGB666)或 16bit 色深(RGB565),建议打开 FRM 功能,通过 dither 的方式弥补色深,使显示达到 24bit 色深(RGB888)的效果。如下图所示,上图是色深为 RGB66 的 LCD 屏显示,下图是打开 dither 后的显示,打开 dither 后色彩渐变的地方过度平滑。
参数设置相应值对应含义为:
0:RGB888 ‑‑ RGB888 direct 1:RGB888 ‑‑ RGB666 dither 2:RGB888 ‑‑ RGB565 dither
lcd_gamma_en
Lcd Gamma Correction Enable,设置相应值的对应含义为:
0:LCD 的 Gamma 校正功能关闭 1:LCD 的 Gamma 校正功能开启设置为 1 时,需要在屏驱动中对
lcd_gamma_tbl[256]进行赋值。lcd_cmap_en
Lcd Color Map Enable, 设置为 1 时,需要对
lcd_cmap_tbl [2][3][4]进行赋值Lcd Color Map Table。每个像素有 R、G、B 三个单元,每四个像素组成一个选择项,总共有 12 个可选。数组第一维表示奇偶行,第二维表示像素的 RGB,第三维表示第几个像素,数组的内容即表示该位置映射到的内容。
LCD CMAP 是对像素的映射输出功能,只有像素有特殊排布的 LCD 屏才需要配置。
LCD CMAP 定义每行的 4 个像素为一个总单元,每个像素分 R、G、B 3 个小单元,总共有 12 个小单元。通过 lcd_cmap_tbl 定义映射关系,输出的每个小单元可随意映射到 12 个小单元之一。
__u32 lcd_cmap_tbl[2][3][4] = { { {LCD_CMAP_G0,LCD_CMAP_B1,LCD_CMAP_G2,LCD_CMAP_B3}, {LCD_CMAP_B0,LCD_CMAP_R1,LCD_CMAP_B2,LCD_CMAP_R3}, {LCD_CMAP_R0,LCD_CMAP_G1,LCD_CMAP_R2,LCD_CMAP_G3}, }, { {LCD_CMAP_B3,LCD_CMAP_G2,LCD_CMAP_B1,LCD_CMAP_G0}, {LCD_CMAP_R3,LCD_CMAP_B2,LCD_CMAP_R1,LCD_CMAP_B0}, {LCD_CMAP_G3,LCD_CMAP_R2,LCD_CMAP_G1,LCD_CMAP_R0}, }, };如上,上三行代表奇数行的像素排布,下三行代表偶数行的像素排布;
每四个像素为一个单元,第一列代表每四个像素的第一个像素映射,第二列代表每四个像素的第二个像素映射,以此类推。
如上的定义,像素的输出格式如下图所示。
lcd_rb_swap
调换
TCON模块RGB中的 R 分量和 B 分量。0:不变 1:调换R分量和B分量需要 gamma 校正,或色彩映射,在
sys_config.fex中将相应模块的enable参数置 1,lcd_gamma_en,lcd_cmap_en,并且填充 3 个系数表,lcd_gamma_tbl,lcd_cmap_tbl,注意的是:gamma,模板提供了 18 段拐点值,然后再插值出所有的值(255 个)。可以往相应表格内添加子项以补充细节部分。cmap_tbl 的大小是固定的,不能减小或增加表的大小。最终生成的 gamma 表项是由 rgb 三个 gamma 值组成的,各占 8bit。目前提供的模板中,三个 gamma 值是相同的。电源和管脚参数
lcd_power
配置好之后,需要在屏驱动调用相应的接口进行开、关的控制。
注意:如果有多个电源需要打开,则定义 lcd_power1,lcd_power2 等。
lcd_pin_power
用法 lcd_power一致,区别是用户设置之后,不需要在屏驱动中去操作,而是驱动框架自行在屏驱动之前使能,在屏驱动之后禁止。
注意:如果需要多组,则添加 lcd_pin_power1,lcd_pin_power2 等。除了 lcddx 之外,这里的电源还有可能是 pwm 所对应管脚的电源。
lcd_gpio_0
示例:
lcd_gpio_0 = port:PD25<0><0><default><0>含义:lcd_gpio_0 引脚为 PD25。
- 第一个尖括号:功能分配。1 为输出。
- 第二个尖括号:内置电阻。使用 0 的话,标示内部电阻高阻态,如果是 1 则是内部电阻上拉,2就代表内部电阻下拉。使用 default 的话代表默认状态,即电阻上拉。其它数据无效。
- 第三个尖括号:驱动能力。default 表驱动能力是等级 1。
- 第四个尖括号:电平。0 为低电平,1 为高电平。
注意:如果有多个 gpio 脚需要控制,则定义 lcd_gpio_0,lcd_gpio_1 等。
- 配置 LCD 的控制 PIN。可以在屏驱动调用相应的接口进行拉高,拉低的控制,例如 LCD 的 RESET 脚等。
- 配置 LCD 的数据 PIN。重点关注 PIN 脚的复用功能数值,具体的 IO 对应关系可参考 user manual 手册进行配置
调试
系统起来之后可以输入disp相关调试命令,来协助调试。
选项 参数 解释 举例 空 空 打印出当前显示的信息 disp -c Screen_id,color 模式 显示 colorbar。共有 8 种模式,0 到 8 disp ‑c 0 8 -b Screen_id, 背光值 调整 lcd 背光,背光值范围时 0 到 255 disp ‑b 0 255 -d Screen_id, 文件路径 抓 DE 图层回写到文件 disp ‑d 0 /sdmmc/xx.bmp -s Screen_id,显示类型,显示分辨率 切换显示类型或分辨率 disp ‑s 0 1 4 打开LCD 显示 查看显示信息
输入disp命令,会有 Log 打印信息。以下信息是所有信息中最重要的。
disp screen 0: derate 297000000 hz, ref_fps:60 mgr0: 1280x800 fmt[rgb] cs[0x204] range[full] eotf[0x4] bits[8bits] err[0] force_sync[0] unblank direct_show[false] lcd output backlight( 50) fps:60.9 1280x 800 err:0 skip:31 irq:1942 vsync:0 vsync_skip:0 BUF enable ch[1] lyr[0] z[0] prem[N] a[globl 255] fmt[ 8] fb[1280, 800;1280, 800;1280, 800] crop[ 0, 0,1280, 800] frame[ 0, 0,1280, 800] addr[ 0, 0, 0] flags[0x 0] trd[0,0]lcd output
表示当前显示接口是 LCD 输出。
1280x800
表示当前 LCD 的分辨率,与 sys_config.fex 中 lcd0 的设置一样。
ref_fps:60
是根据你在 sys_config.fex 的 lcd0 填的时序算出来的理论值。
fps:60.9
后面的数值是实时统计的,正常来说应该是在 60(期望的 fps) 附近,如果差太多则不正常,重新检查屏时序,和在屏驱动的初始化序列是否有被调用到。
irq:1942
这是 vsync 中断的次数,每加 1 都代表刷新了一帧,正常来说是一秒 60(期望的 fps)次,重复 cat sys,如果无变化,则异常。
BUF
开头的表示图层信息,一行 BUF 表示一个图层,如果一个 BUF 都没有出现,那么将是黑屏,不过和屏驱动本身关系就不大了,应该查看应用层 & 框架层。
err:0
这个表示缺数,如果数字很大且一直变化,屏幕会花甚至全黑,全红等。
skip:31
这个表示跳帧的数量,如果这个数值很大且一直变化,有可能卡顿,如果数字与 irq 后面的数字一样,说明每一帧都跳,会黑屏(有背光)
查看时钟信息
hal_ccmu这个命令可以看哪个时钟是否使能,然后频率是多少。与显示相关的是 tcon,pll_video等。
查看接口自带 colorbar
显示是一整条链路,中间任何一个环节出错,最终的表现都是显示异常,图像显示异常几个可能原因:
- 图像本身异常。
- 图像经过 DE(Display Engine)后异常。
- 图像经过接口模块后异常。这是我们关注的点。
有一个简单的方法可以初步判断,接口模块(tcon 和 dsi 等)可以自己输出内置的一些 patten,比如说彩条,灰阶图,棋盘图等。当接口输出这些内置 patten 的时候,如果这时候显示就异常,这说明了:
- LCD 的驱动或者配置有问题
- LCD 屏由于外部环境导致显示异常
显示自带 patten 的方式:
disp ‑c 0 X上面的操作是显示 colorbar,其中的 X 可以是 0 到 8
FAQ
屏显示异常
总结过往经验,绝大部分屏显异常都是由于上下电时序和 timing 不合理导致。
黑屏‑无背光
问题表现:完全黑屏,背光也没有
- 屏驱动添加失败。驱动没有加载屏驱动,导致背光电源相关函数没有运行到。这个你可以通过相关模块的测试命令定位下。
- pwm 配置和背光电路的问题,pwm 的信息可以查看 pwm 模块测试命令和背光相关参数,另外就是直接测量下硬件测量下相关管脚和电压,再检查屏是否初始化成功。
黑屏‑有背光
黑屏但是有背光,可能有多种原因导致,请依次按以下步骤检查
- 没送图层。如果应用没有送任何图层那么表现的现象就是黑屏,通过查看显示信息一小节可以确定有没有送图层。如果确定没有图层,可以通过查看接口自带 colorbar,确认屏能否正常显示。
- SoC 端的显示接口模块没有供电。SoC 端模块没有供电自然无法传输视频信号到屏上。
- 复位脚没有复位。如果有复位脚,请确保硬件连接正确,确保复位脚的复位操作有放到屏驱动中。
- sys_config.fex 中 lcd0 有严重错误。第一个是 lcd 的 timing 搞错了,请严格按照屏手册中的提示来写。参考屏时序参数说明。第二个就是,接口类型搞错,比如接的 DSI 屏,配置却写成LVDS 的。
- 屏的初始化命令不对。包括各个步骤先后顺序,延时等,这个时候请找屏厂确认初始化命令。
闪屏
分为几种:
- 屏的整体在闪:这个最大可能是背光电路的电压不稳定,检查电压
- 屏部分在闪,而且是概率性:sys_config.fex 中的时序填写不合理。
- 屏上由一个矩形区域在闪:屏极化导致,需要关机放一边再开机则不会。
条形波纹
有些 LCD 屏的像素格式是 18bit 色深(RGB666)或 16bit 色深(RGB565),建议打开 FRM 功能,通过 dither 的方式弥补色深,使显示达到 24bit 色深(RGB888)的效果。
设置 [lcd0] 的 lcd_frm 属性可以改善这种现象。
背光太亮或者太暗
重新配置背光参数
花屏
花屏的第一个原因是 fps 过高,超过屏的限制:
FPS 异常是一件非常严重的事情,关系到整个操作系统的稳定,如果 fps 过高会造成系统带宽增加,送显流程异常,fps 过高还会造成 LCD 屏花屏不稳定,容易造成 LCD 屏损坏,FPS 过低则造成用户体验过差。
- 通过查看查看显示信息一节,可以得知现在的实时统计的 fps
- 如果 fps 离正常值差很多,首先检查 sys_config.fex 中 [lcd0] 节点,所填信息必须满足下面公式:
lcd_dclk_freq * num_of_pixel_clk = lcd_ht * lcd_vt * fps / 1e9其中,num_of_pixel_clk 通常为 1,表示发送一个像素所需要的时钟周期为 1 一个,低分辨率的MCU 和串行接口通常需要 2 到 3 个时钟周期才能发送完一个像素。
如果上面填写没有错,通过查看查看时钟信息可以确认下几个主要时钟的频率信息,把这些信息和 sys_config.fex 发给维护者进一步分析。
RGB 接口或者 I8080 接口显示抖动有花纹
- 改大时钟管脚的管脚驱动能力
- 修改时钟相位,也就是修改 lcd_hv_clk_phase。由于发送端和接收端时钟相位的不同导致接收端解错若干位。
LCD 屏出现极化和残影
何谓液晶极化现象:实际上就是液晶电介质极化。就是在外界电场作用下,电介质内部沿电场方向产生感应偶极矩,在电解质表明出现极化电荷的现象叫做电介质的极化。
通俗的讲就是在液晶面板施加一定电压后,会聚集大量电荷,当电压消失的时候,这些聚集的电荷也要释放,但由于介电效应,这些聚集的电荷不会立刻释放消失,这些不会马上消失的惰性电荷造成了液晶的 DC 残留从而形成了极化现象。
几种常见的液晶极化现象
- 液晶长期静止某个画面的时候,切换到灰阶画面的时候出现屏闪,屏闪一段时间后消失。这种现象属于残留电荷放电的过程。
- 液晶长期静止某个画面的时候,出现四周发黑中间发白的现象,业内称为黑白电视框异常。
- 非法关机的时候,重新上电会出现屏闪,屏闪一定时间后消失。与第一种原因相同。
- 残影现象:当液晶静止在一个画面比较久的情况下,切换其他画面出现的镜像残留。残影的本质来说是液晶 DC 残留电荷导致,某种意义来说也属于液晶极化现象
针对液晶屏出现极化和残影现象,有如下对策。
- 调整 vcom 电压大小。
VCOM 是液晶分子偏转的参考电压,要求要稳定,对液晶显示有直接影响,具体的屏不同的话也是不同的。电压的具体值是根据输入的数据以及 Vcom 电压大小来确定的,用来显示各种不同灰阶,也就是实现彩色显示 GAMMA。Gamma 电压是用来控制显示器的灰阶的,一般情况下分为G0~G14,不同的 Gamma 电压与 Vcom 电压之间的压差造成液晶旋转角度不同从而形成亮度的差异,Vcom 电压最好的状况是位于 G0 和 G14 的中间值,这样液晶屏的闪烁状况会最好。调节 vcom 电压的方式,如果屏管脚有 vcom 管脚,直接调整相关电路,如果屏 driver IC 提供寄存器接口,可以通过寄存器接口来调整大小。
- 严格按照屏规定的上下电时序来对屏进行开关屏。许多极化残影现象并非长时间显示静止显示某个画面导致的,而是由于关机或者关屏时没有严格按照下电时序导致的,比如该关的电没关,或者延时不够。
典型屏幕参数配置
1024x600 RGB666 屏幕
;-------------------------------------------------- ;Parallel RGB LCD ;-------------------------------------------------- [lcd0] lcd_used = 1 lcd_driver_name = "default_lcd" lcd_backlight = 150 lcd_if = 0 lcd_x = 1024 lcd_y = 600 lcd_width = 150 lcd_height = 94 lcd_rb_swap = 0 lcd_dclk_freq = 48 lcd_pwm_used = 1 lcd_pwm_ch = 7 lcd_pwm_freq = 500000 lcd_pwm_pol = 1 lcd_hbp = 160 lcd_ht = 1344 lcd_hspw = 20 lcd_vbp = 20 lcd_vt = 635 lcd_vspw = 3 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 0 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 ;reset ;lcd_gpio_0 = port:GPIO_EXP15<1><0><3><1> ;cs ;lcd_gpio_1 = port:GPIO_EXP03<1><0><3><0> ;sdi ;lcd_gpio_2 = port:GPIO_EXP06<1><0><3><0> ;scl ;lcd_gpio_3 = port:GPIO_EXP07<1><0><3><0> ;LCD_D2-LCD_D7 lcd_gpio_4 = port:PA00<8><0><3><0> lcd_gpio_5 = port:PA01<8><0><3><0> lcd_gpio_6 = port:PA02<8><0><3><0> lcd_gpio_7 = port:PA03<8><0><3><0> lcd_gpio_8 = port:PA04<8><0><3><0> lcd_gpio_9 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D15 lcd_gpio_10 = port:PA11<8><0><3><0> lcd_gpio_11 = port:PA10<8><0><3><0> lcd_gpio_12 = port:PA08<8><0><3><0> lcd_gpio_13 = port:PA07<8><0><3><0> lcd_gpio_14 = port:PA06<8><0><3><0> lcd_gpio_15 = port:PA09<8><0><3><0> ;LCD_D18-LCD_D23 lcd_gpio_16 = port:PA12<8><0><3><0> lcd_gpio_17 = port:PA13<8><0><3><0> lcd_gpio_18 = port:PA14<8><0><3><0> lcd_gpio_19 = port:PA15<8><0><3><0> lcd_gpio_20 = port:PB03<8><0><3><0> lcd_gpio_21 = port:PB02<8><0><3><0> ;LCD_VSYNC, LCD_HSYNC, LCD_DCLK, LCD_DE lcd_gpio_0 = port:PA18<8><0><3><0> lcd_gpio_1 = port:PA19<8><0><3><0> lcd_gpio_2 = port:PA20<8><0><3><0> lcd_gpio_3 = port:PA21<8><0><3><0>320x480 ST7796 i8080 屏幕
;-------------------------------------------------- ;MCU LCD ;-------------------------------------------------- [lcd0] lcd_used = 1 lcd_driver_name = "cl40bc1019_cpu" lcd_backlight = 150 lcd_if = 1 lcd_x = 320 lcd_y = 480 lcd_width = 150 lcd_height = 94 lcd_rb_swap = 0 lcd_pwm_used = 1 lcd_pwm_ch = 7 lcd_pwm_freq = 5000 lcd_pwm_pol = 1 lcd_cpu_mode = 0 lcd_cpu_te = 0 lcd_cpu_if = 12 lcd_dclk_freq = 32 lcd_hbp = 75 lcd_ht = 1060 lcd_hspw = 40 lcd_vbp = 6 lcd_vt = 490 lcd_vspw = 2 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 0 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 deu_mode = 0 lcdgamma4iep = 22 smart_color = 90 ;reset pin lcd_gpio_0 = port:PB03<1><0><3><0> ;CS lcd_gpio_1 = port:PA12<1><0><3><0> ;LCD_D3-LCD_D7 lcd_gpio_2 = port:PA01<8><0><3><0> lcd_gpio_3 = port:PA02<8><0><3><0> lcd_gpio_4 = port:PA03<8><0><3><0> lcd_gpio_5 = port:PA04<8><0><3><0> lcd_gpio_6 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D12 lcd_gpio_7 = port:PA11<8><0><3><0> lcd_gpio_8 = port:PA10<8><0><3><0> lcd_gpio_9 = port:PA08<8><0><3><0> ;WR lcd_gpio_10 = port:PA06<7><0><3><0> ;RD lcd_gpio_11 = port:PA07<7><0><3><0> ;RS lcd_gpio_12 = port:PA09<7><0><3><0>480x480 RGB 86 面板屏
;-------------------------------------------------- ;Parallel RGB LCD ;-------------------------------------------------- [lcd0] lcd_used = 1 lcd_driver_name = "p0400060a" lcd_backlight = 150 lcd_if = 0 lcd_x = 480 lcd_y = 480 lcd_width = 94 lcd_height = 94 lcd_rb_swap = 0 lcd_dclk_freq = 21 lcd_hv_clk_phase = 1 lcd_pwm_used = 1 lcd_pwm_ch = 6 lcd_pwm_freq = 5000 lcd_pwm_pol = 1 lcd_hbp = 80 lcd_ht = 648 lcd_hspw = 8 lcd_vbp = 10 lcd_vt = 522 lcd_vspw = 2 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 1 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 deu_mode = 0 lcdgamma4iep = 22 smart_color = 90 ;reset lcd_gpio_0 = port:PB01<1><0><3><1> ;cs lcd_gpio_1 = port:PA27<1><0><3><0> ;sdi lcd_gpio_2 = port:PA28<1><0><3><0> ;scl lcd_gpio_3 = port:PB00<1><0><3><0> ;LCD_D2-LCD_D7 lcd_gpio_4 = port:PA00<8><0><3><0> lcd_gpio_5 = port:PA01<8><0><3><0> lcd_gpio_6 = port:PA02<8><0><3><0> lcd_gpio_7 = port:PA03<8><0><3><0> lcd_gpio_8 = port:PA04<8><0><3><0> lcd_gpio_9 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D15 lcd_gpio_10 = port:PA11<8><0><3><0> lcd_gpio_11 = port:PA10<8><0><3><0> lcd_gpio_12 = port:PA08<8><0><3><0> lcd_gpio_13 = port:PA07<8><0><3><0> lcd_gpio_14 = port:PA06<8><0><3><0> lcd_gpio_15 = port:PA09<8><0><3><0> ;LCD_D18-LCD_D23 lcd_gpio_16 = port:PA12<8><0><3><0> lcd_gpio_17 = port:PA13<8><0><3><0> lcd_gpio_18 = port:PA14<8><0><3><0> lcd_gpio_19 = port:PA15<8><0><3><0> lcd_gpio_20 = port:PB03<8><0><3><0> lcd_gpio_21 = port:PB02<8><0><3><0> ;LCD_VSYNC, LCD_HSYNC, LCD_DCLK, LCD_DE lcd_gpio_22 = port:PA18<8><0><3><0> lcd_gpio_23 = port:PA19<8><0><3><0> lcd_gpio_24 = port:PA20<8><0><3><0> lcd_gpio_25 = port:PA21<8><0><3><0>320x320 i8080 86 面板屏
[lcd0] lcd_used = 1 lcd_driver_name = "d392t9390v0_cpu" lcd_backlight = 200 lcd_if = 1 lcd_x = 320 lcd_y = 320 lcd_width = 78 lcd_height = 78 lcd_rb_swap = 1 lcd_pwm_used = 1 lcd_pwm_ch = 7 lcd_pwm_freq = 50000 lcd_pwm_pol = 1 lcd_cpu_mode = 0 lcd_cpu_te = 0 lcd_cpu_if = 12 lcd_dclk_freq = 32 lcd_hbp = 75 lcd_ht = 1060 lcd_hspw = 40 lcd_vbp = 6 lcd_vt = 490 lcd_vspw = 2 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 0 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 deu_mode = 0 lcdgamma4iep = 22 smart_color = 90 ;reset pin lcd_gpio_0 = port:PA12<1><0><3><0> ;LCD_D3-LCD_D7 lcd_gpio_2 = port:PA01<8><0><3><0> lcd_gpio_3 = port:PA02<8><0><3><0> lcd_gpio_4 = port:PA03<8><0><3><0> lcd_gpio_5 = port:PA04<8><0><3><0> lcd_gpio_6 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D12 lcd_gpio_7 = port:PA11<8><0><3><0> lcd_gpio_8 = port:PA10<8><0><3><0> lcd_gpio_9 = port:PA08<8><0><3><0> ;WR lcd_gpio_10 = port:PA06<7><0><3><0> ;RD lcd_gpio_11 = port:PA07<7><0><3><0> ;RS lcd_gpio_12 = port:PA09<7><0><3><0>800x480 标准 40Pin RGB屏
[lcd0] lcd_used = 1 lcd_driver_name = "default_lcd" lcd_backlight = 150 lcd_if = 0 lcd_x = 800 lcd_y = 480 lcd_width = 150 lcd_height = 94 lcd_rb_swap = 0 lcd_dclk_freq = 33 lcd_pwm_used = 1 lcd_pwm_ch = 6 lcd_pwm_freq = 5000 lcd_pwm_pol = 1 lcd_hbp = 46 lcd_ht = 1055 lcd_hspw = 0 lcd_vbp = 23 lcd_vt = 525 lcd_vspw = 0 lcd_lvds_if = 0 lcd_lvds_colordepth = 1 lcd_lvds_mode = 0 lcd_frm = 0 lcd_io_phase = 0x0000 lcd_gamma_en = 0 lcd_bright_curve_en = 0 lcd_cmap_en = 0 deu_mode = 0 lcdgamma4iep = 22 smart_color = 90 ;LCD_D2-LCD_D7 lcd_gpio_0 = port:PA00<8><0><3><0> lcd_gpio_1 = port:PA01<8><0><3><0> lcd_gpio_2 = port:PA02<8><0><3><0> lcd_gpio_3 = port:PA03<8><0><3><0> lcd_gpio_4 = port:PA04<8><0><3><0> lcd_gpio_5 = port:PA05<8><0><3><0> ;LCD_D10-LCD_D15 lcd_gpio_6 = port:PA11<8><0><3><0> lcd_gpio_7 = port:PA10<8><0><3><0> lcd_gpio_8 = port:PA08<8><0><3><0> lcd_gpio_9 = port:PA07<8><0><3><0> lcd_gpio_10 = port:PA06<8><0><3><0> lcd_gpio_11 = port:PA09<8><0><3><0> ;LCD_D18-LCD_D23 lcd_gpio_12 = port:PA12<8><0><3><0> lcd_gpio_13 = port:PA13<8><0><3><0> lcd_gpio_14 = port:PA14<8><0><3><0> lcd_gpio_15 = port:PA15<8><0><3><0> lcd_gpio_16 = port:PB03<8><0><3><0> lcd_gpio_17 = port:PB02<8><0><3><0> ;LCD_VSYNC, LCD_HSYNC, LCD_DCLK, LCD_DE lcd_gpio_18 = port:PA18<8><0><3><0> lcd_gpio_19 = port:PA19<8><0><3><0> lcd_gpio_20 = port:PA20<8><0><3><0> lcd_gpio_21 = port:PA21<8><0><3><0>
-
技术帖 | 飞凌嵌入式T113-i开发板的休眠及唤醒操作发布在 飞凌嵌入式专区
飞凌嵌入式OK113i-S开发板支持两种休眠方式:freeze和mem。
这两种方式可以通过/sys/power/state文件节点进行操作,用户可以通过在该文件节点写入freeze或mem来触发相应的休眠状态。
在进行休眠之前,系统会配置唤醒源。一旦系统进入休眠状态,可以通过这些唤醒源(如按键、RTC等)在需要时唤醒系统。这种设计允许用户根据需要选择何时以及通过何种方式快速唤醒系统,实现了功耗最小化和快速恢复的平衡。这一机制使得系统在休眠状态下能够极大地减少功耗,同时保留了用户在唤醒后迅速使用系统的便利性。
本篇内容小编会为大家介绍如何让飞凌嵌入式OK113i-S开发板进入休眠模式,以及如何通过RTC时钟实现定时唤醒。
关于两种休眠模式
- freeze
冻结I/O设备,将它们置于低功耗状态,使处理器进入空闲状态,唤醒最快,耗电比其它方式高。实测OK113i-S开发板在只接串口线的情况下5V供电,电流约为0.112A。
- mem
挂起到内存,计算机将目前的运行状态等数据存放在内存,关闭硬盘、外设等设备,进入等待状态。此时内存仍然需要电力维持其数据,但整机耗电很少。恢复时计算机从内存读出数据,回到挂起前的状态,恢复速度较快。实测OK113i-S开发板在只接串口线情况下5V供电,电流约为0.076A。
1、cat /sys/power/state可以看到OK113i-S开发板支持的模式有哪些:

2、echo freeze > /sys/power/state 进入freeze模式:

3、echo mem > /sys/power/state 进入mem模式:
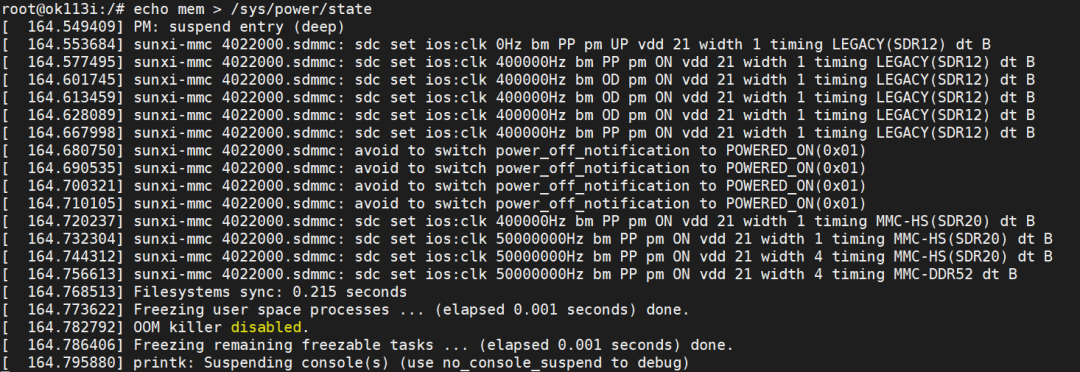
通过RTC定时唤醒
注意:此处需要使用内部RTC,外部RTC不支持唤醒功能,后面我们还会提及。
进入开发板的内核配置:
root@ubuntu: /home/forlinx/work/linux/OK113i-linux-sdk# ./build.sh menuconfig根据下图框选进行功能选择:
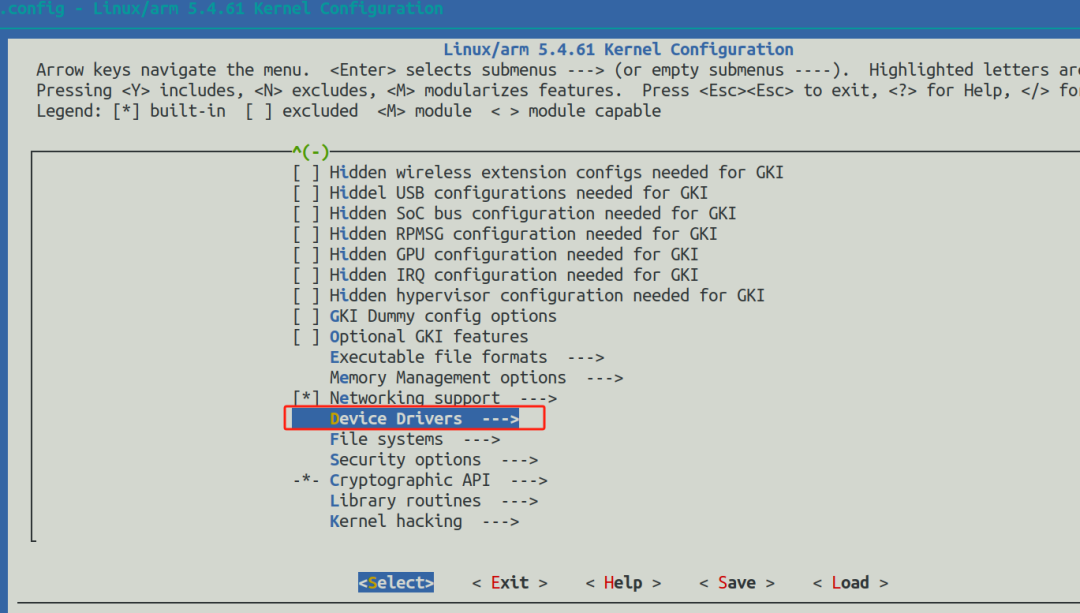
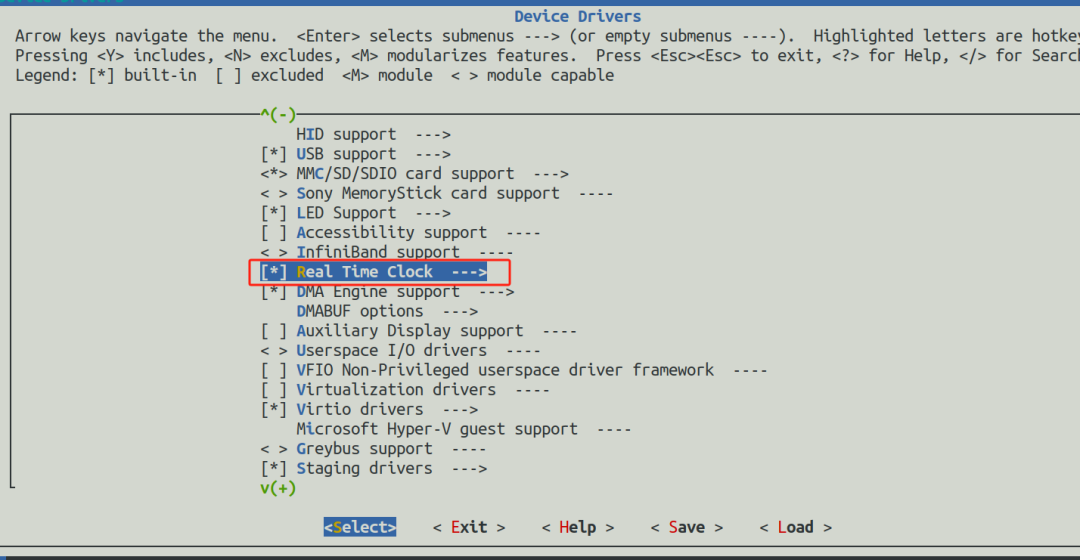
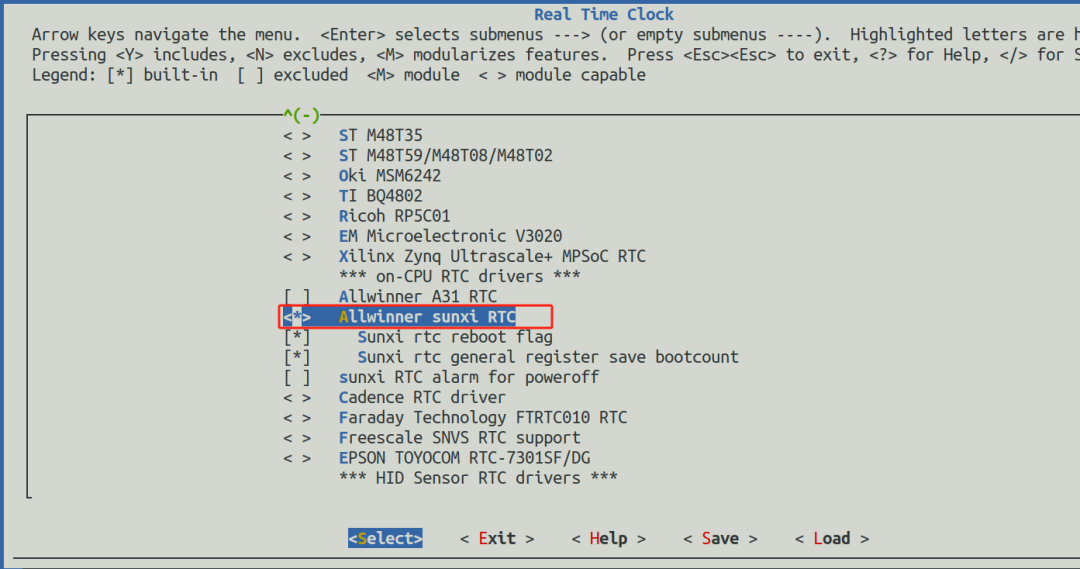
配置完成后保存,然后修改设备树文件,打开内部RTC功能。

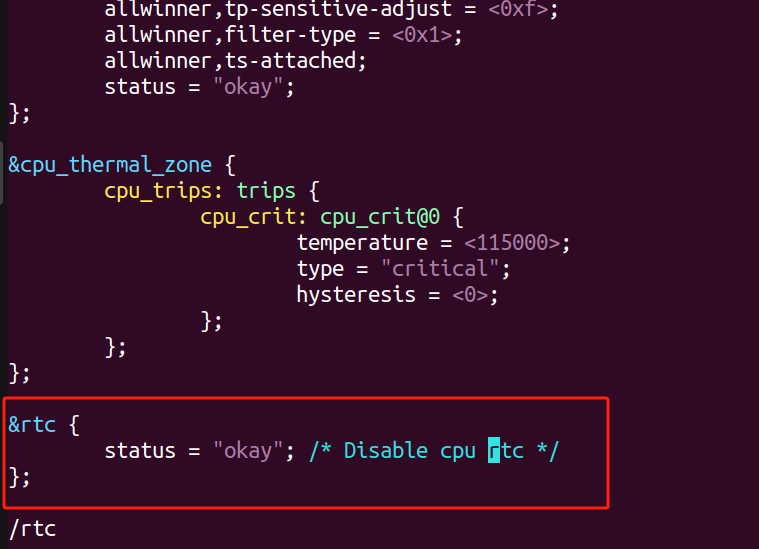
保存后进行编译:
编译成功后打包成镜像,烧写完成后,我们在串口终端进行测试。
进入串口终端进行测试:
echo “+15”> /sys/class/rtc/rtc0/wakealarm此处为15秒定时,可自由设置时间,命令执行后就会生效,RTC会单独计时,如果是15秒后才进入休眠,不会触发唤醒。(注意此处需要使用内部RTC,外部RTC不支持唤醒功能)
echo mem > /sys/power/state(这里两条指令输入时要紧凑,两条指令间,间隔太长就无效了)
(这里需要注意,我们在未打开内部RTC时,我们的外部RTC默认节点是rtc0,修改后外部rtc设备节点会变更成rtc1。)
到这里,我们就完成了在飞凌嵌入式OK113i-S开发板上实现休眠以及通过RTC定时唤醒的全部操作了,当然,不同的主控平台板卡的具体操作会有差异,但是整体思路是一样的,具体可以根据相对应的平台查看相关资料来确定具体步骤,希望本文提供的方法能够对屏幕前的工程师朋友们的项目开发有所帮助。
-
【R128】应用开发案例——按键输入发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
按键输入
本文案例代码 下载地址 按键输入案例代码 https://www.aw-ol.com/downloads?cat=24 首先我们搭建电路,如下:
引脚 按键 PA25 按键1脚 GND 按键3脚 载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1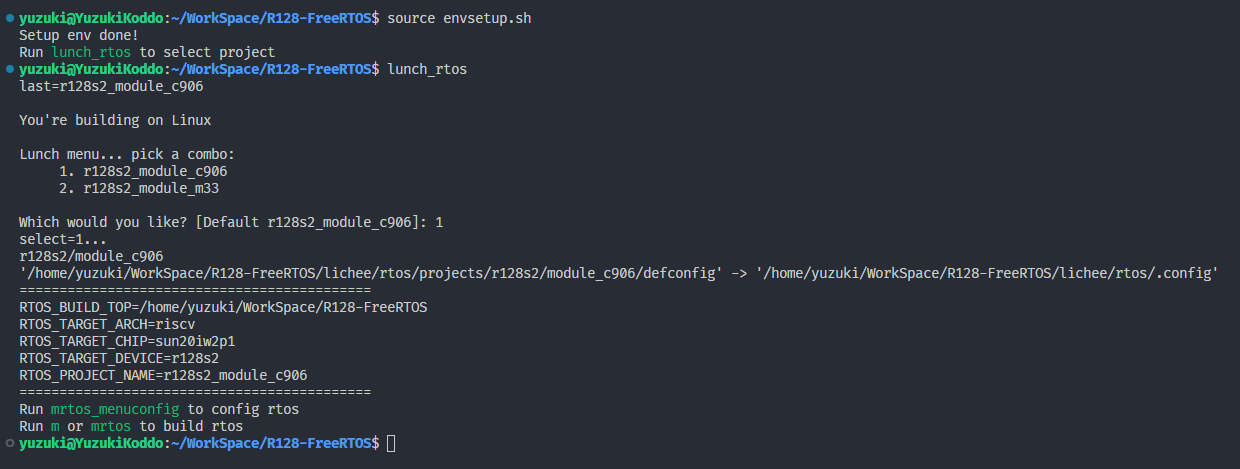
勾选 GPIO 驱动
mrtos_menuconfig找到下列驱动Drivers Options ---> soc related device drivers ---> GPIO devices ---> [*] enable GPIO driver [*] enbale GPIO hal APIs Test command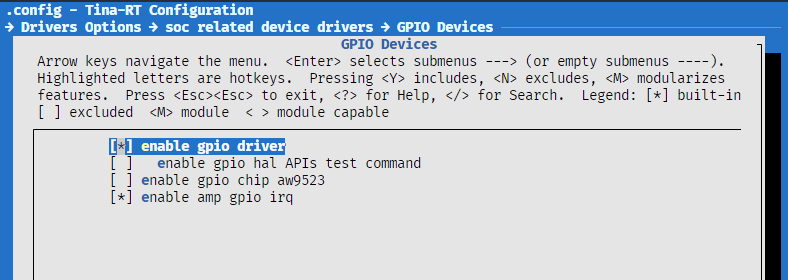
编写程序
打开你喜欢的编辑器,修改文件:
lichee/rtos/projects/r128s2/module_c906/src/main.c
引入头文件
#include <hal_gpio.h>
使用 GPIO 配置引脚
配置 GPIO 的上下拉状态
使用
hal_gpio_set_pull(gpio_pin_t pin, gpio_pull_status_t pull);来设置。这里我们设置PA25引脚为默认上拉状态。hal_gpio_set_pull(GPIOA(25), GPIO_PULL_UP);配置 GPIO 输入输出模式
使用
hal_gpio_set_direction(gpio_pin_t pin, gpio_direction_t direction);来设置 GPIO 的输入输出模式,这里配置为输入模式。hal_gpio_set_direction(GPIOA(25), GPIO_DIRECTION_INPUT);配置 GPIO 的 MUX 功能
GPIO 通常有多种功能,需要配置 MUX 选择需要的功能,使用
hal_gpio_pinmux_set_function(gpio_pin_t pin, gpio_muxsel_t function_index);来设置 GPIO 的复用功能,这里配置为GPIO 输入模式(GPIO_MUXSEL_IN)hal_gpio_pinmux_set_function(GPIOA(25), GPIO_MUXSEL_IN);获取 GPIO 的电平
使用
int hal_gpio_get_data(gpio_pin_t pin, gpio_data_t *data);来获取 GPIO 的电平,这里获取 A25 的电平状态。gpio_data_t gpio_data; hal_gpio_get_data(GPIOA(25), &gpio_data);完整的配置 GPIO
gpio_data_t gpio_data; hal_gpio_set_pull(GPIOA(25), GPIO_PULL_UP); hal_gpio_set_direction(GPIOA(25), GPIO_DIRECTION_INPUT); hal_gpio_pinmux_set_function(GPIOA(25), GPIO_MUXSEL_IN); while(1){ hal_gpio_get_data(GPIOA(25), &gpio_data); if(gpio_data == GPIO_DATA_LOW){ printf("Key Pressed!\n"); } }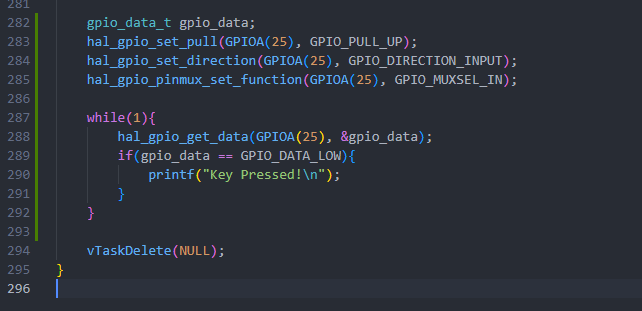
结果
按下按键,串口会输出
Key Pressed!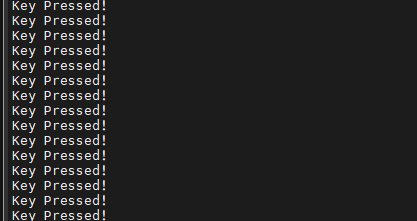
-
全志T527芯片详解【一】:计算性能发布在 T Series
高效架构 性能稳健
内置8*ARM Cortex-A55,8核主频可运行至1.8GHz,提供更稳健强劲的处理能力
- Octa-core ARM Cortex-A55 in a DynamlQ big.LITTLE configuration, up to 1.8 GHz
- 32KB L1 I-cache and 32KB L1 D-cache per A55 core
- Optional 64KB L2 cache per“LITTLE”core
- Optional 128KB L2 cache per“big”core

图形显示 清晰流畅
集成ARM Mail-G57 GPU图形显示能力更上一层楼
- ARM G57 MC1 GPU
- Supports OpenGL ES 3.2/2.0/1.1, Vulkan 1.1/1.2/1.3, and OpenCL2.2
- Anti-aliasing algorithm
- High memory bandwidth and low power consumption in 3D graphics processing

边缘计算 AI赋能
集成2Tops NPU为端侧语音、自然语言处理、图像处理及画质增强等AI应用提供性能支持
- 2 TOPS NPU
- Embedded 512KB internal buffer
- Supports deep learning frameworks:TensorFlow, Pytorch, Caffe, Onnx NN, TFLite.......

声音算法 浑然天成
内置HiFi4 DSP,频率可达600MHz,广泛应用于图像、音频及数字信号处理的专用领域为 影音娱乐、工业生产提供专属算力
- HiFi4 Audio DSP
- 32KB I-cache +32KB D-cache
独立MCU 控制更实时
内置RISC-V架构MCU,主频可达200MHz独立运行RTOS系统,为工业及机器人系统上的实时处理、高速响应及工业级的稳定运行提供重要保障
- RISC-V CPU, up to 200 MHz
- 16 KB I-cache and 16 KB D-cache·RV32IMAFC instructions

更多全志T527芯片详解系列专题内容即将发布
联系我们
微信公众号: Allwinnertech
官方邮箱:service@allwinnertech.com
-
【R128】应用开发案例——SPI驱动ST7789V1.3寸LCD发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
SPI驱动ST7789V1.3寸LCD
R128 平台提供了 SPI DBI 的 SPI TFT 接口,具有如下特点:
- Supports DBI Type C 3 Line/4 Line Interface Mode
- Supports 2 Data Lane Interface Mode
- Supports data source from CPU or DMA
- Supports RGB111/444/565/666/888 video format
- Maximum resolution of RGB666 240 x 320@30Hz with single data lane
- Maximum resolution of RGB888 240 x 320@60Hz or 320 x 480@30Hz with dual data lane
- Supports tearing effect
- Supports software flexible control video frame rate
同时,提供了 SPILCD 驱动框架以供 SPI 屏幕使用。
此次适配的SPI屏为
ZJY130S0800TG01,使用的是 SPI 进行驱动。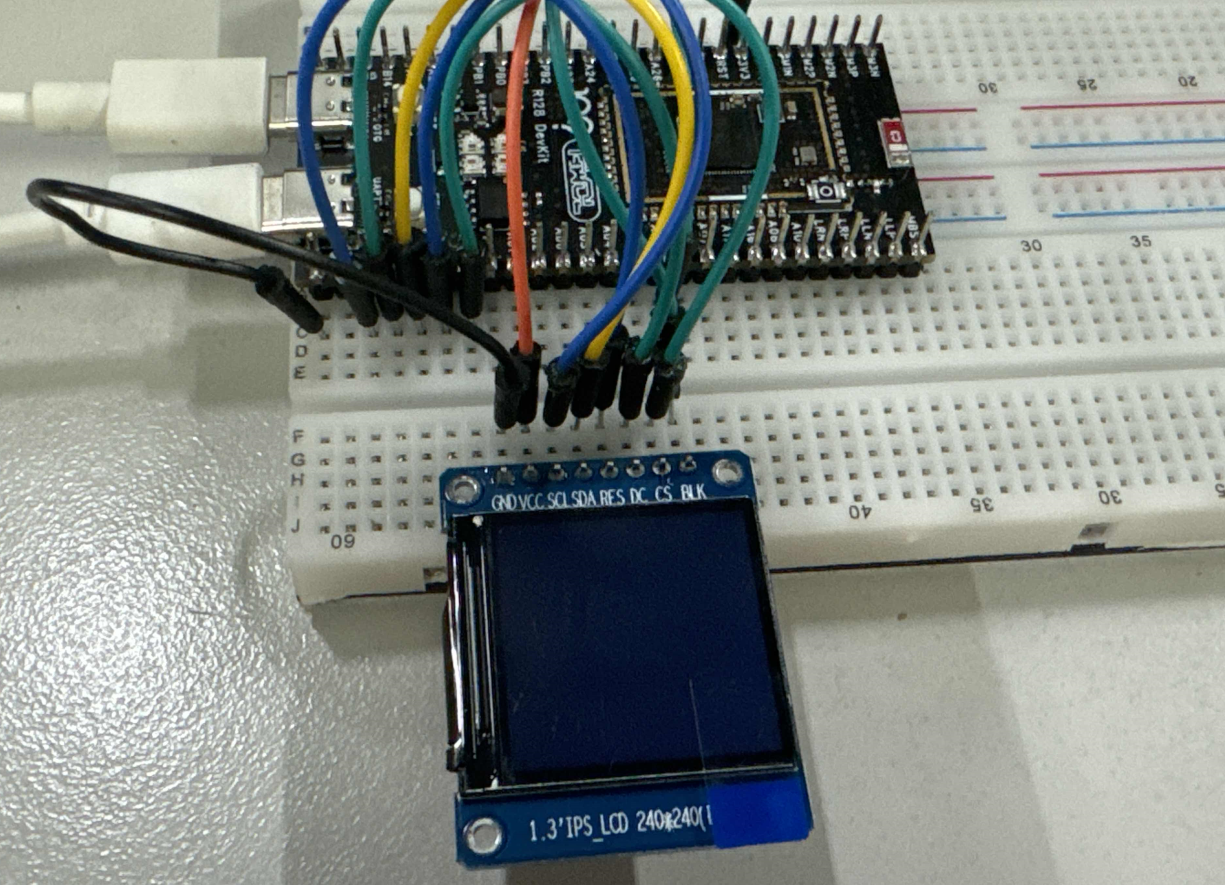
引脚配置如下:
R128 Devkit TFT 模块 PA12 CS PA13 SCL PA18 SDA PA9 BLK PA20 RES PA19 DC 3V3 VCC GND GND 载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1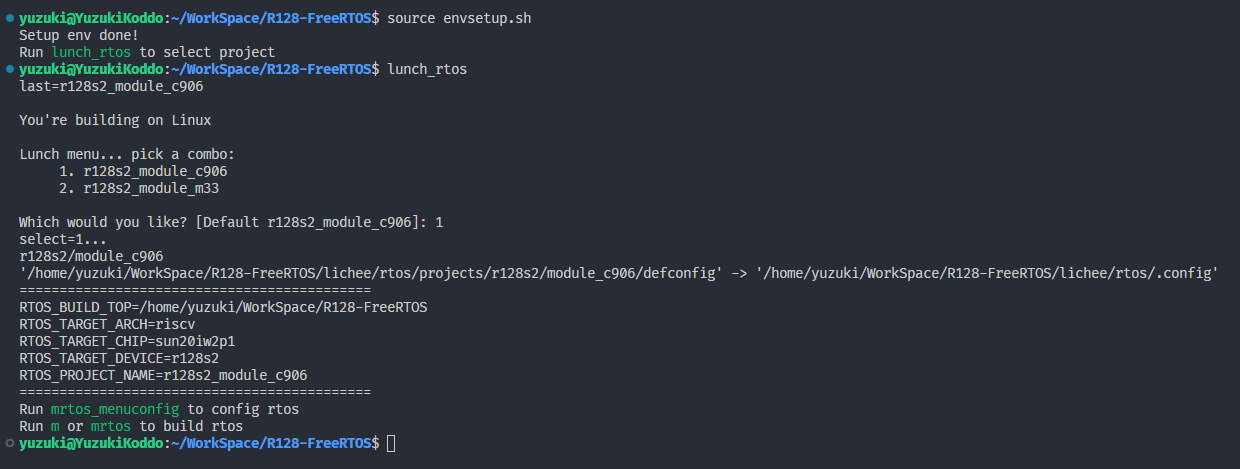
设置 SPI 驱动
屏幕使用的是SPI驱动,所以需要勾选SPI驱动,运行
mrtos_menuconfig进入配置页面。前往下列地址找到SPI DevicesDrivers Options ---> soc related device drivers ---> SPI Devices ---> -*- enable spi driver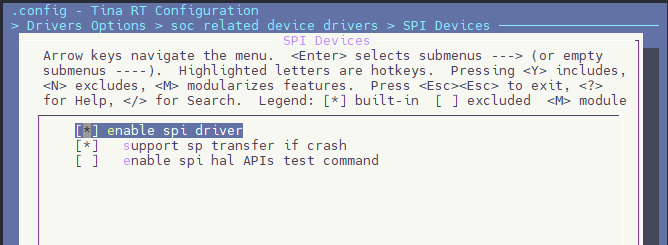
配置 SPI 引脚
打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex,在这里我们不需要用到 SPI HOLD与SPI WP引脚,注释掉即可。;---------------------------------------------------------------------------------- ;SPI controller configuration ;---------------------------------------------------------------------------------- ;Please config spi in dts [spi1] spi1_used = 1 spi1_cs_number = 1 spi1_cs_bitmap = 1 spi1_cs0 = port:PA12<6><0><3><default> spi1_sclk = port:PA13<6><0><3><default> spi1_mosi = port:PA18<6><0><3><default> spi1_miso = port:PA21<6><0><3><default> ;spi1_hold = port:PA19<6><0><2><default> ;spi1_wp = port:PA20<6><0><2><default>
设置 PWM 驱动
屏幕背光使用的是PWM驱动,所以需要勾选PWM驱动,运行
mrtos_menuconfig进入配置页面。前往下列地址找到PWM DevicesDrivers Options ---> soc related device drivers ---> PWM Devices ---> -*- enable pwm driver
配置 PWM 引脚
打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex,增加 PWM1 节点[pwm1] pwm_used = 1 pwm_positive = port:PA9<4><0><3><default>
设置 SPI LCD 驱动
SPI LCD 由专门的驱动管理。运行
mrtos_menuconfig进入配置页面。前往下列地址找到SPILCD Devices,注意同时勾选spilcd hal APIs test方便测试使用。Drivers Options ---> soc related device drivers ---> [*] DISP Driver Support(spi_lcd) [*] spilcd hal APIs test
编写 SPI LCD 显示屏驱动
获取屏幕初始化序列
首先询问屏厂提供驱动源码
找到 LCD 的初始化序列代码
找到屏幕初始化的源码
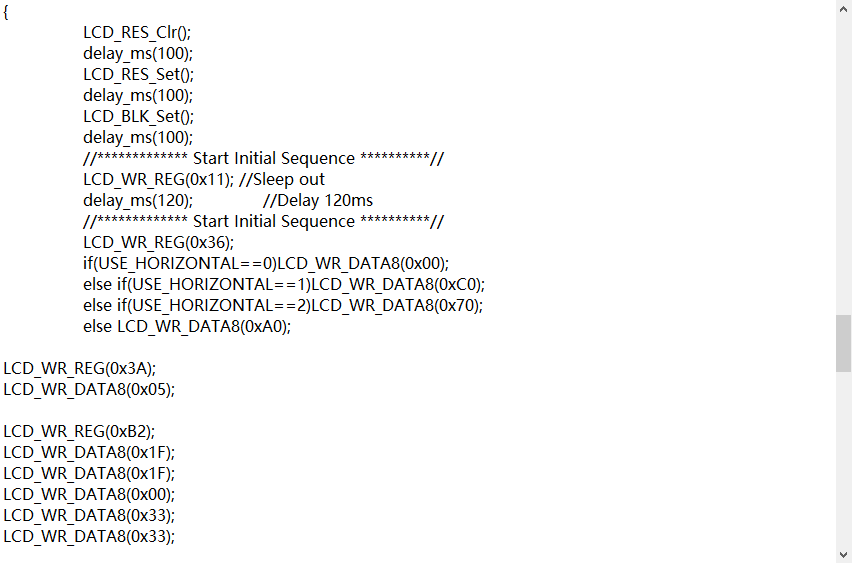
整理后的初始化代码如下:
LCD_WR_REG(0x11); // Sleep out delay_ms(120); // Delay 120ms //************* Start Initial Sequence **********// LCD_WR_REG(0x36); LCD_WR_DATA8(0x00); LCD_WR_REG(0x3A); LCD_WR_DATA8(0x05); LCD_WR_REG(0xB2); LCD_WR_DATA8(0x1F); LCD_WR_DATA8(0x1F); LCD_WR_DATA8(0x00); LCD_WR_DATA8(0x33); LCD_WR_DATA8(0x33); LCD_WR_REG(0xB7); LCD_WR_DATA8(0x35); LCD_WR_REG(0xBB); LCD_WR_DATA8(0x20); // 2b LCD_WR_REG(0xC0); LCD_WR_DATA8(0x2C); LCD_WR_REG(0xC2); LCD_WR_DATA8(0x01); LCD_WR_REG(0xC3); LCD_WR_DATA8(0x01); LCD_WR_REG(0xC4); LCD_WR_DATA8(0x18); // VDV, 0x20:0v LCD_WR_REG(0xC6); LCD_WR_DATA8(0x13); // 0x13:60Hz LCD_WR_REG(0xD0); LCD_WR_DATA8(0xA4); LCD_WR_DATA8(0xA1); LCD_WR_REG(0xD6); LCD_WR_DATA8(0xA1); // sleep in后,gate输出为GND LCD_WR_REG(0xE0); LCD_WR_DATA8(0xF0); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x07); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x25); LCD_WR_DATA8(0x33); LCD_WR_DATA8(0x3C); LCD_WR_DATA8(0x36); LCD_WR_DATA8(0x14); LCD_WR_DATA8(0x12); LCD_WR_DATA8(0x29); LCD_WR_DATA8(0x30); LCD_WR_REG(0xE1); LCD_WR_DATA8(0xF0); LCD_WR_DATA8(0x02); LCD_WR_DATA8(0x04); LCD_WR_DATA8(0x05); LCD_WR_DATA8(0x05); LCD_WR_DATA8(0x21); LCD_WR_DATA8(0x25); LCD_WR_DATA8(0x32); LCD_WR_DATA8(0x3B); LCD_WR_DATA8(0x38); LCD_WR_DATA8(0x12); LCD_WR_DATA8(0x14); LCD_WR_DATA8(0x27); LCD_WR_DATA8(0x31); LCD_WR_REG(0xE4); LCD_WR_DATA8(0x1D); // 使用240根gate (N+1)*8 LCD_WR_DATA8(0x00); // 设定gate起点位置 LCD_WR_DATA8(0x00); // 当gate没有用完时,bit4(TMG)设为0 LCD_WR_REG(0x21); LCD_WR_REG(0x29);用现成驱动改写 SPI LCD 驱动
选择一个现成的 SPI LCD 改写即可,这里选择
nv3029s.c驱动来修改
复制这两个驱动,重命名为
st7789v.c
先编辑
st7789v.h将nv3029s改成st7789v
#ifndef _ST7789V_H #define _ST7789V_H #include "panels.h" struct __lcd_panel st7789v_panel; #endif /*End of file*/编辑
st7789v.c将nv3029s改成st7789v
编写初始化序列
先删除
static void LCD_panel_init(unsigned int sel)中的初始化函数。
然后将屏厂提供的初始化序列复制进来
然后按照
spi_lcd框架的接口改写驱动接口,具体接口如下屏厂函数 SPILCD框架接口 LCD_WR_REGsunxi_lcd_cmd_writeLCD_WR_DATA8sunxi_lcd_para_writedelay_mssunxi_lcd_delay_ms可以直接进行替换

完成后如下
然后对照屏厂提供的驱动修改
address函数
做如下修改
static void address(unsigned int sel, int x, int y, int width, int height) { sunxi_lcd_cmd_write(sel, 0x2B); /* Set row address */ sunxi_lcd_para_write(sel, (y >> 8) & 0xff); sunxi_lcd_para_write(sel, y & 0xff); sunxi_lcd_para_write(sel, (height >> 8) & 0xff); sunxi_lcd_para_write(sel, height & 0xff); sunxi_lcd_cmd_write(sel, 0x2A); /* Set coloum address */ sunxi_lcd_para_write(sel, (x >> 8) & 0xff); sunxi_lcd_para_write(sel, x & 0xff); sunxi_lcd_para_write(sel, (width >> 8) & 0xff); sunxi_lcd_para_write(sel, width & 0xff); sunxi_lcd_cmd_write(sel, 0x2c); }完成驱动如下
#include "st7789v.h" static void LCD_power_on(u32 sel); static void LCD_power_off(u32 sel); static void LCD_bl_open(u32 sel); static void LCD_bl_close(u32 sel); static void LCD_panel_init(u32 sel); static void LCD_panel_exit(u32 sel); #define RESET(s, v) sunxi_lcd_gpio_set_value(s, 0, v) #define power_en(sel, val) sunxi_lcd_gpio_set_value(sel, 0, val) static struct disp_panel_para info[LCD_FB_MAX]; static void address(unsigned int sel, int x, int y, int width, int height) { sunxi_lcd_cmd_write(sel, 0x2B); /* Set row address */ sunxi_lcd_para_write(sel, (y >> 8) & 0xff); sunxi_lcd_para_write(sel, y & 0xff); sunxi_lcd_para_write(sel, (height >> 8) & 0xff); sunxi_lcd_para_write(sel, height & 0xff); sunxi_lcd_cmd_write(sel, 0x2A); /* Set coloum address */ sunxi_lcd_para_write(sel, (x >> 8) & 0xff); sunxi_lcd_para_write(sel, x & 0xff); sunxi_lcd_para_write(sel, (width >> 8) & 0xff); sunxi_lcd_para_write(sel, width & 0xff); sunxi_lcd_cmd_write(sel, 0x2c); } static void LCD_panel_init(unsigned int sel) { if (bsp_disp_get_panel_info(sel, &info[sel])) { lcd_fb_wrn("get panel info fail!\n"); return; } sunxi_lcd_cmd_write(sel, 0x11); // Sleep out sunxi_lcd_delay_ms(120); // Delay 120ms //************* Start Initial Sequence **********// sunxi_lcd_cmd_write(sel, 0x36); sunxi_lcd_para_write(sel, 0x00); sunxi_lcd_cmd_write(sel, 0x3A); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_cmd_write(sel, 0xB2); sunxi_lcd_para_write(sel, 0x1F); sunxi_lcd_para_write(sel, 0x1F); sunxi_lcd_para_write(sel, 0x00); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_cmd_write(sel, 0xB7); sunxi_lcd_para_write(sel, 0x35); sunxi_lcd_cmd_write(sel, 0xBB); sunxi_lcd_para_write(sel, 0x20); // 2b sunxi_lcd_cmd_write(sel, 0xC0); sunxi_lcd_para_write(sel, 0x2C); sunxi_lcd_cmd_write(sel, 0xC2); sunxi_lcd_para_write(sel, 0x01); sunxi_lcd_cmd_write(sel, 0xC3); sunxi_lcd_para_write(sel, 0x01); sunxi_lcd_cmd_write(sel, 0xC4); sunxi_lcd_para_write(sel, 0x18); // VDV, 0x20:0v sunxi_lcd_cmd_write(sel, 0xC6); sunxi_lcd_para_write(sel, 0x13); // 0x13:60Hz sunxi_lcd_cmd_write(sel, 0xD0); sunxi_lcd_para_write(sel, 0xA4); sunxi_lcd_para_write(sel, 0xA1); sunxi_lcd_cmd_write(sel, 0xD6); sunxi_lcd_para_write(sel, 0xA1); // sleep in后,gate输出为GND sunxi_lcd_cmd_write(sel, 0xE0); sunxi_lcd_para_write(sel, 0xF0); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x07); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x25); sunxi_lcd_para_write(sel, 0x33); sunxi_lcd_para_write(sel, 0x3C); sunxi_lcd_para_write(sel, 0x36); sunxi_lcd_para_write(sel, 0x14); sunxi_lcd_para_write(sel, 0x12); sunxi_lcd_para_write(sel, 0x29); sunxi_lcd_para_write(sel, 0x30); sunxi_lcd_cmd_write(sel, 0xE1); sunxi_lcd_para_write(sel, 0xF0); sunxi_lcd_para_write(sel, 0x02); sunxi_lcd_para_write(sel, 0x04); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_para_write(sel, 0x05); sunxi_lcd_para_write(sel, 0x21); sunxi_lcd_para_write(sel, 0x25); sunxi_lcd_para_write(sel, 0x32); sunxi_lcd_para_write(sel, 0x3B); sunxi_lcd_para_write(sel, 0x38); sunxi_lcd_para_write(sel, 0x12); sunxi_lcd_para_write(sel, 0x14); sunxi_lcd_para_write(sel, 0x27); sunxi_lcd_para_write(sel, 0x31); sunxi_lcd_cmd_write(sel, 0xE4); sunxi_lcd_para_write(sel, 0x1D); // 使用240根gate (N+1)*8 sunxi_lcd_para_write(sel, 0x00); // 设定gate起点位置 sunxi_lcd_para_write(sel, 0x00); // 当gate没有用完时,bit4(TMG)设为0 sunxi_lcd_cmd_write(sel, 0x21); sunxi_lcd_cmd_write(sel, 0x29); if (info[sel].lcd_x < info[sel].lcd_y) address(sel, 0, 0, info[sel].lcd_x - 1, info[sel].lcd_y - 1); else address(sel, 0, 0, info[sel].lcd_y - 1, info[sel].lcd_x - 1); } static void LCD_panel_exit(unsigned int sel) { sunxi_lcd_cmd_write(sel, 0x28); sunxi_lcd_delay_ms(20); sunxi_lcd_cmd_write(sel, 0x10); sunxi_lcd_delay_ms(20); sunxi_lcd_pin_cfg(sel, 0); } static s32 LCD_open_flow(u32 sel) { lcd_fb_here; /* open lcd power, and delay 50ms */ LCD_OPEN_FUNC(sel, LCD_power_on, 50); /* open lcd power, than delay 200ms */ LCD_OPEN_FUNC(sel, LCD_panel_init, 200); LCD_OPEN_FUNC(sel, lcd_fb_black_screen, 50); /* open lcd backlight, and delay 0ms */ LCD_OPEN_FUNC(sel, LCD_bl_open, 0); return 0; } static s32 LCD_close_flow(u32 sel) { lcd_fb_here; /* close lcd backlight, and delay 0ms */ LCD_CLOSE_FUNC(sel, LCD_bl_close, 50); /* open lcd power, than delay 200ms */ LCD_CLOSE_FUNC(sel, LCD_panel_exit, 10); /* close lcd power, and delay 500ms */ LCD_CLOSE_FUNC(sel, LCD_power_off, 10); return 0; } static void LCD_power_on(u32 sel) { /* config lcd_power pin to open lcd power0 */ lcd_fb_here; power_en(sel, 1); sunxi_lcd_power_enable(sel, 0); sunxi_lcd_pin_cfg(sel, 1); RESET(sel, 1); sunxi_lcd_delay_ms(100); RESET(sel, 0); sunxi_lcd_delay_ms(100); RESET(sel, 1); } static void LCD_power_off(u32 sel) { lcd_fb_here; /* config lcd_power pin to close lcd power0 */ sunxi_lcd_power_disable(sel, 0); power_en(sel, 0); } static void LCD_bl_open(u32 sel) { sunxi_lcd_pwm_enable(sel); /* config lcd_bl_en pin to open lcd backlight */ sunxi_lcd_backlight_enable(sel); lcd_fb_here; } static void LCD_bl_close(u32 sel) { /* config lcd_bl_en pin to close lcd backlight */ sunxi_lcd_backlight_disable(sel); sunxi_lcd_pwm_disable(sel); lcd_fb_here; } /* sel: 0:lcd0; 1:lcd1 */ static s32 LCD_user_defined_func(u32 sel, u32 para1, u32 para2, u32 para3) { lcd_fb_here; return 0; } static int lcd_set_var(unsigned int sel, struct fb_info *p_info) { return 0; } static int lcd_set_addr_win(unsigned int sel, int x, int y, int width, int height) { address(sel, x, y, width, height); return 0; } static int lcd_blank(unsigned int sel, unsigned int en) { return 0; } struct __lcd_panel st7789v_panel = { /* panel driver name, must mach the name of lcd_drv_name in sys_config.fex */ .name = "st7789v", .func = { .cfg_open_flow = LCD_open_flow, .cfg_close_flow = LCD_close_flow, .lcd_user_defined_func = LCD_user_defined_func, .blank = lcd_blank, .set_var = lcd_set_var, .set_addr_win = lcd_set_addr_win, }, };对接驱动框架
完成了屏幕驱动的编写,接下来需要对接到 SPILCD 驱动框架。首先编辑
Kconfig
增加
st7789v的配置
config LCD_SUPPORT_ST7789V bool "LCD support st7789v panel" default n ---help--- If you want to support st7789v panel for display driver, select it.然后编辑
panels.c在panel_array里增加st7789驱动的引用
如下图
#ifdef CONFIG_LCD_SUPPORT_ST7789V &st7789v_panel, #endif之后编辑
panels.h同样增加引用
如下图
#ifdef CONFIG_LCD_SUPPORT_ST7789V extern struct __lcd_panel st7789v_panel; #endif最后编辑外层的
Makefile增加编译选项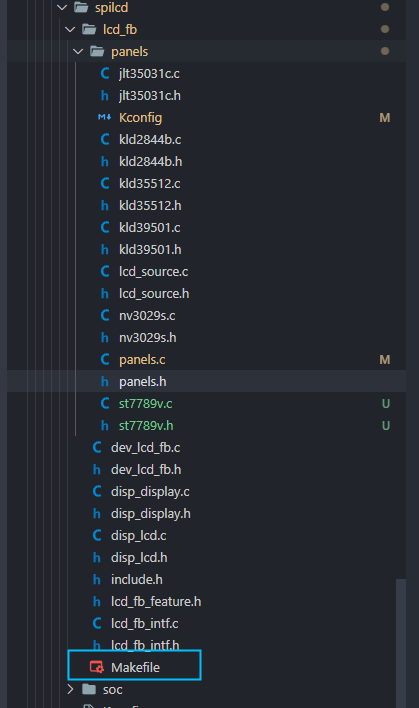
如下所示
obj-${CONFIG_LCD_SUPPORT_ST7789V} += panels/st7789v.o选择 ST7789V 驱动
在 SPILCD 驱动选择界面可以看到
LCD_FB panels select选择 SPI 屏幕的驱动进入
LCD_FB panels select选项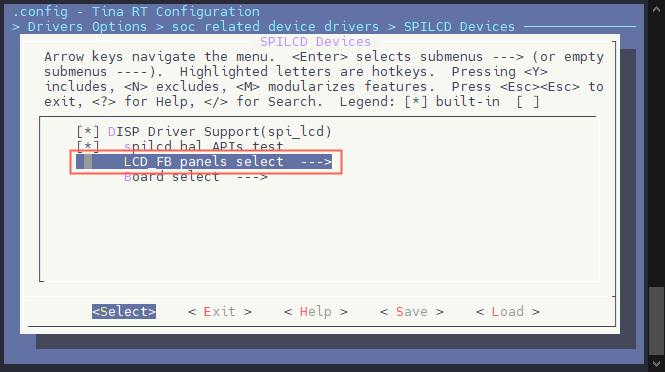
选择并勾选
[*] LCD support st7789v panel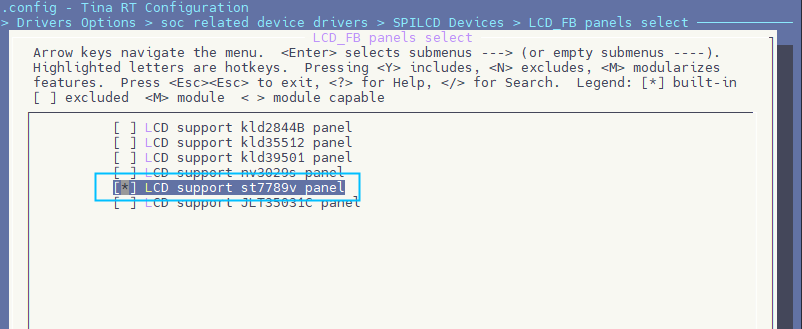
配置 SPI LCD 引脚
打开你喜欢的编辑器,修改文件:
board/r128s2/module/configs/sys_config.fex[lcd_fb0] lcd_used = 1 lcd_model_name = "spilcd" lcd_driver_name = "st7789v" ; 屏幕规格配置 lcd_x = 240 lcd_y = 240 lcd_width = 32 lcd_height = 32 ; SPI 速率 lcd_data_speed = 50 ; PWM 背光配置项 lcd_pwm_used = 1 lcd_pwm_ch = 1 lcd_pwm_freq = 5000 lcd_pwm_pol = 0 lcd_backlight = 100 ; 配置 lcd_if = 1 为 SPI 模式,双缓冲 lcd_if = 0 fb_buffer_num = 2 ; SPI 模式下以下配置无效 lcd_pixel_fmt = 11 lcd_dbi_fmt = 2 lcd_dbi_clk_mode = 1 lcd_dbi_te = 1 lcd_dbi_if = 4 lcd_rgb_order = 0 lcd_fps = 60 ; 使用 SPI1 作为通讯接口 lcd_spi_bus_num = 1 lcd_frm = 2 lcd_gamma_en = 1 lcd_power_num = 0 lcd_gpio_regu_num = 0 lcd_bl_percent_num = 0 lcd_spi_dc_pin = port:PA19<1><0><3><0> ;RESET Pin lcd_gpio_0 = port:PA20<1><0><2><0>编译打包
运行命令
mp编译打包,可以看到编译了st7789v.o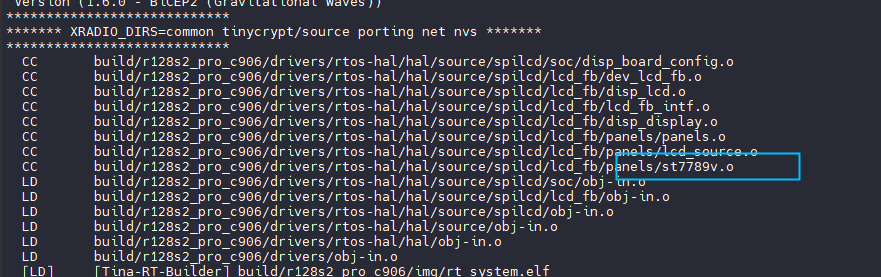
测试
烧录启动之后,屏幕背光启动,但是屏幕全黑。
输入
test_spilcd,屏幕显示黄色。
输入
lv_examples 1可以显示lvgl界面
常见问题
LVGL 出现 DMA Over Size

这是由于 LVGL 配置的
LV_COLOR_DEPTH为 32,但是 SPI 屏配置为16位。请修改lv_conf.h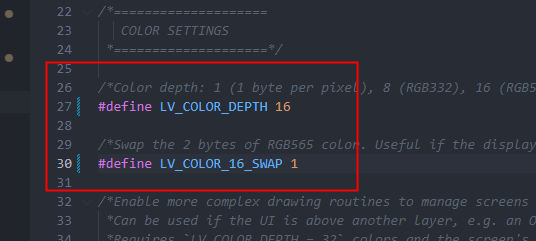
出现部分花屏
- 检查
address函数是否正确 - 检查
sys_config.fex屏幕配置分辨率是否正确
-
我DIY了一个可以声控刷抖音的神器,这下连手指都解放了发布在 H/F/TV Series
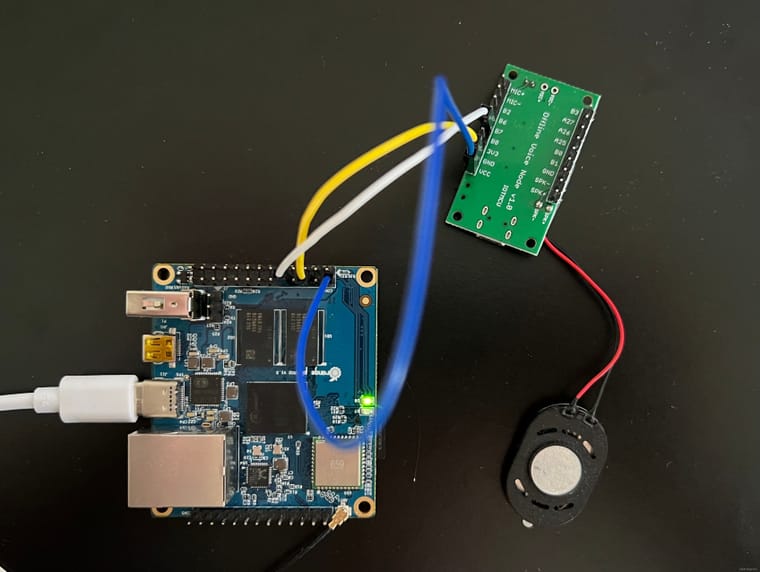
用一块板两个模块三根线就可以爆改手机,实现语音控制刷抖音,上下滑动视频、点赞那都是基础操作,关键是还可以一键睡觉,懒人福音!

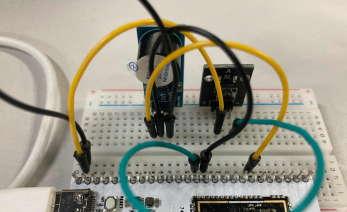
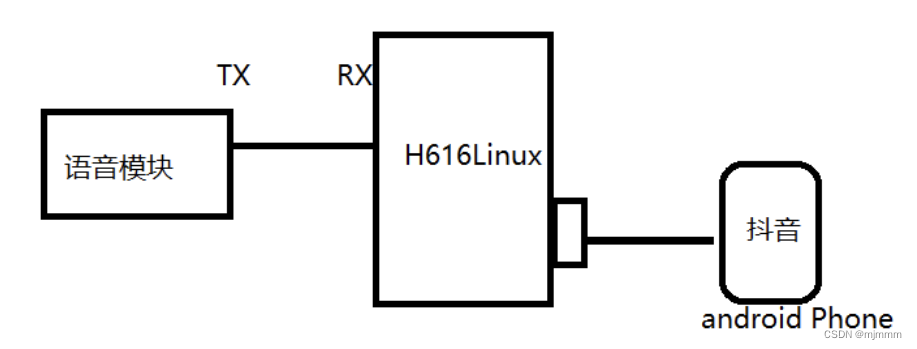
所谓一块板两个模块三根线,一块开发板就是负责接收和控制的香橙派H616开发板,两个模块分别是负责发送的语音识别模块SU-03T和一个mic,所以除了电源外,只需要将语音识别模块的TX(B7)接到香橙派的RX就可以,算上电源共三根线:
项目需求只是简单的通过语音指令来控制安卓手机刷抖音,以实现视频切换和点赞等功能:
1、开机播报“你好,我是你的刷抖音助手”
2、当说出“你好抖音助手"可以唤醒模块,模块回复“抖音助手在”
3、当超过10s没有指令或说出“退下”时,模块会进入休眠模式,并回复“有需要再叫我”
4、当说出“下一个视频”或“这个不好看”时,模块回复“切换至下一个视频”,并划到下一个视频
5、当说出“上一个视频”或“刚刚那个挺好看”时,模块回复“切换至上一个视频”,并划回上一个视频
6、当说出“点个赞”或“这个视频不错”时,模块回复“已为您点赞”,并点赞当前视频
7、当说出“不想看了”时,模块回复“已为您关闭屏幕”,并关闭手机屏幕,一键入睡!语音识别模块配置
项目中所需要的是一个非特定语音识别,也就是不识别特定人类的声音的模块。所以SU-03T这个模块的操作相较于其他语音识别模块更简单,不需要编程或二次开发,只需要通过厂家给的网站配置后即可使用。
创建产品

设置PIN脚为串口模式
对于语音识别模块,串口的RX和TX分别对应B6和B7,并设置相应的波特率

设置唤醒词

设置指令语句
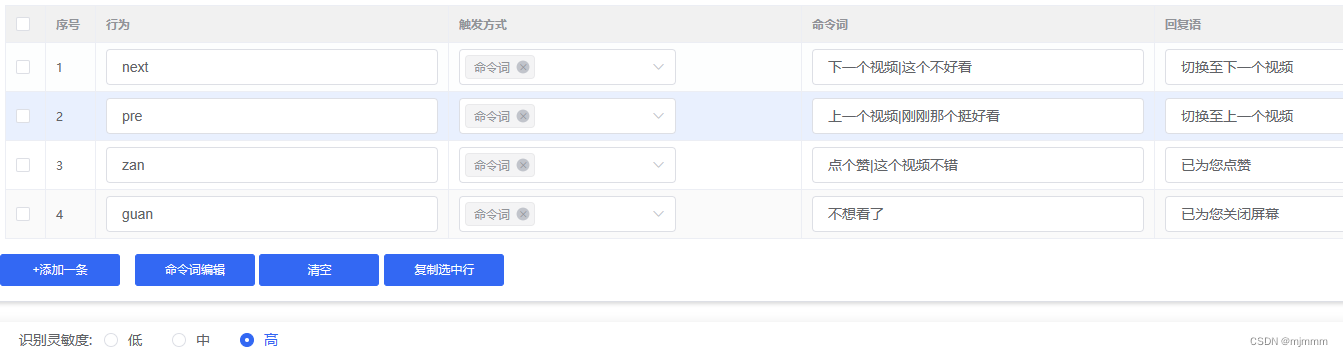
设置控制详情
参数的设置就是行为的名字,大写字母 ,16进制ASCII码,已空格分开
- next -> 4E 45 58 54
- pre -> 50 52 45
- zan -> 5A 41 4E
- guan -> 47 55 41 4E

测试
在完成以上步骤,并下载SDK并烧写进入语音识别模块后,可以打开串口助手来测试一下,分别说出对应的指令,看看语音识别模块是否会向串口发送对应的字符。
分别说出了四条指令,可见串口输出正确!
编写香橙派代码框架
语音识别模块设置完成后,就可以将语音识别模块接到香橙派并进行Linux部分的代码编写,连接方式如下图所示:
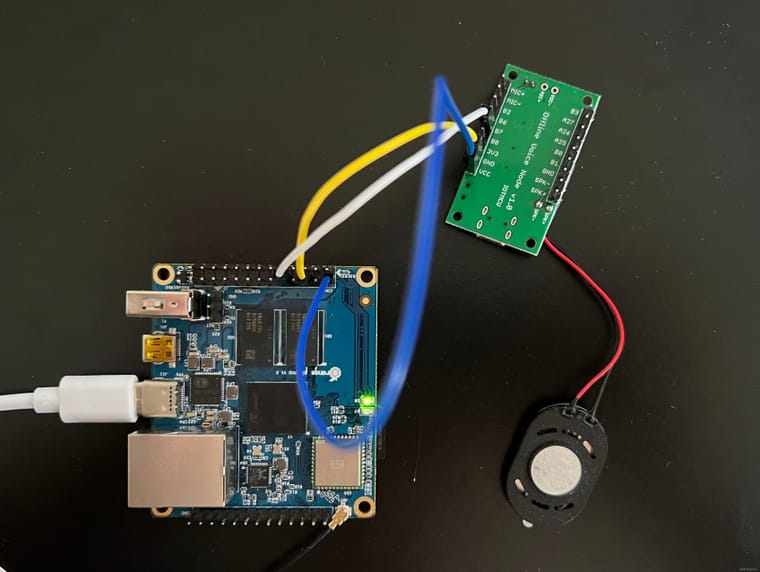
新创建一个“douyin”文件夹,将语音刷抖音项目的代码放在这里面:

然后将一些代码拷贝进来方便修改:

重新编译一下,并说出4条控制语句:
可见,语音识别模块成功识别了指令,香橙派成功的接收了语音识别模块通过串口打印的字符!
现在,就需要修改serial_douyin.c中接收的代码,添加数据处理的部分,先简单写一个数据处理的框架
void *write_serial(void *arg) { char readbuf[32] = {'\0'}; while(1){ while(serialDataAvail (*((int *)arg))){ serialGetstring (*((int *)arg),readbuf) ; if(strcmp(readbuf,"NEXT") == 0 ){ printf("收到下一条视频指令\n"); }else if(strcmp(readbuf,"PRE") == 0){ printf("收到上一条视频指令\n"); }else if(strcmp(readbuf,"ZAN") == 0){ printf("收到点赞指令\n"); }else if(strcmp(readbuf,"GUAN") == 0){ printf("收到关闭指令\n"); }else{ printf("未知指令\n"); } memset(readbuf,'\0',32); } } pthread_exit(NULL); }重新编译一下,并说出4条控制语句:
可见,函数框架正确,接下来只需要将printf替换成真正的操作手机的代码就可以了。
将手机接入香橙派
将我破旧的小米5C再次拿出哈哈哈,然后通过 TYPE-C -- USB 连接到香橙派:
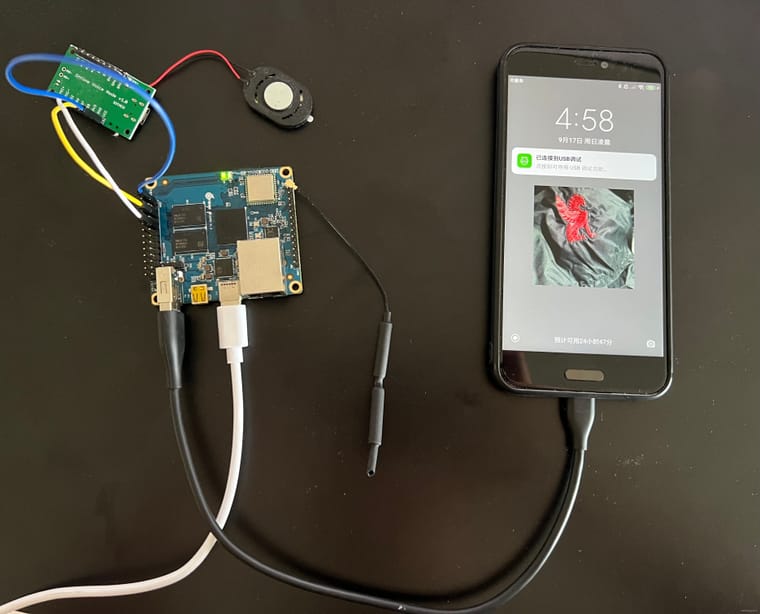
香橙派输入dmesg指令查看手机接入情况,可见已经成功识别

由于安卓手机的底层也是用Linux系统来操作的,所以可以通过香橙派来直接进入控制手机shell的界面,但需要先安装adb工具,adb是做安卓开发中常用的工具
sudo apt-get insall adb安装完之后,执行”adb devices“指令,发现好像权限不太对,因此需要在安卓手机上设置权限

报错的本质原因是香橙派系统还不支持USB设备的热拔插和UDEV的机制。
什么是UDEV
udev是一个设备管理工具,udev以守护进程的形式运行,通过侦听内核发出来的uevent来管理/dev目录下的设备文件。
udev在用户空间运行,而不在内核空间 运行。它能够根据系统中的硬 件设备的状态动态更新设备文件,包括设备文件的创建,删除等。设备文件通常放在/dev目录下。使用udev后,在/dev目录下就只包含系统中真正存在的设备。
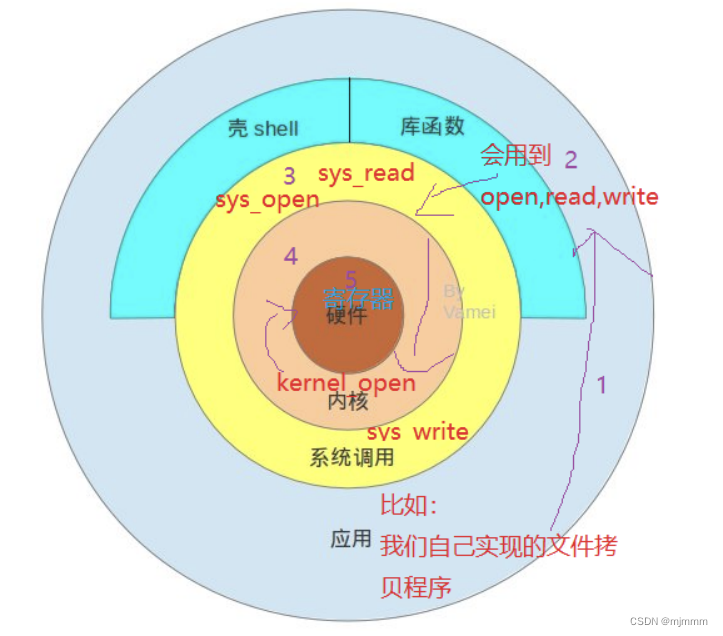
解决办法:在 /etc/udev/rules.d 文件夹下创建规则文件:
cd /etc/udev/rules.d/ sudo vim 51-android.rules然后在文件中添加内容:
cd /etc/udev/rules.d/ sudo vim 51-android.rules

然后重新拔插手机,再次执行”adb devices“指令

没有任何报错了,此时”adb shell“指令会显示连接成功,此时如果“ls”一下,可以看到很多文件没有权限,因为没有root,不过不重要,到这里手机端的配置就好了
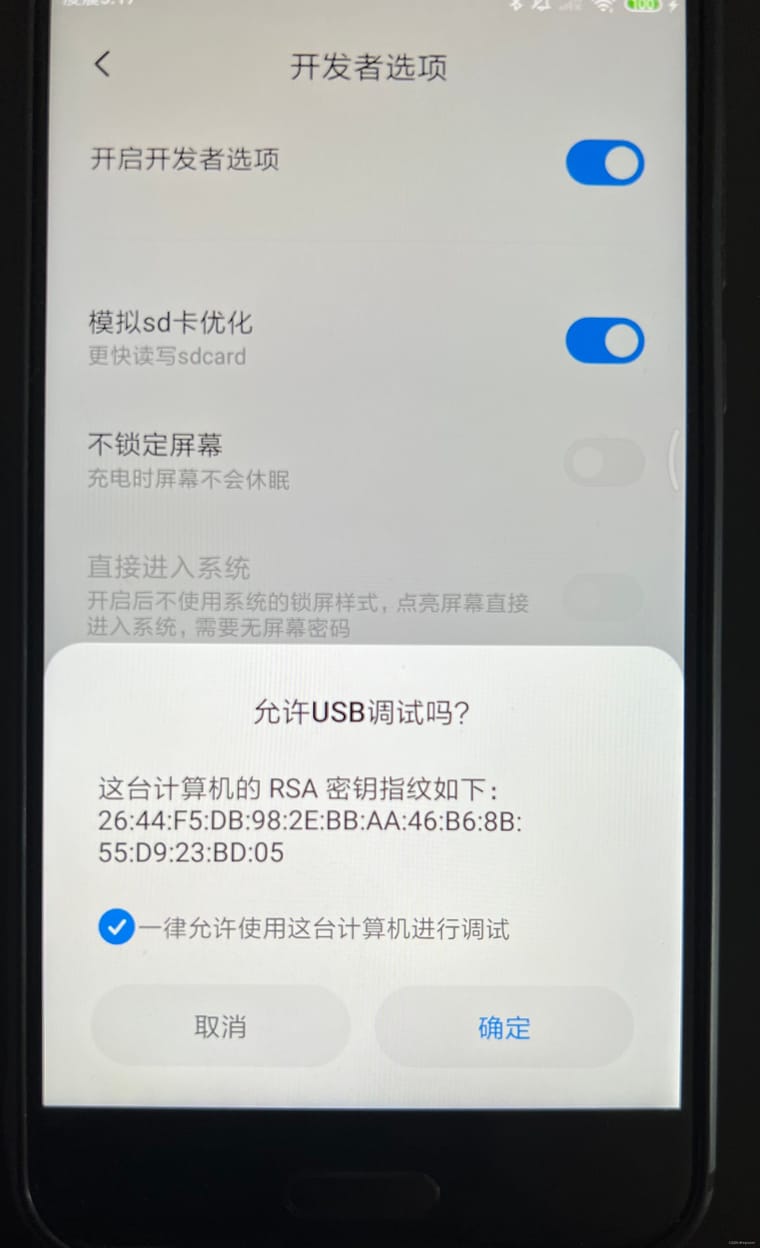
现在可以成功的连入手机内部的系统,关键就在于对于滑动或点击屏幕的指令模拟了,
- adb shell input swipe <起始x坐标> <起始y坐标> <结束x坐标> <结束y坐标> <滑动持续时间ms>
- adb shell input keyevent <按键事件的常量>
adb shell input swipe 540 1300 540 500 500 //下滑 adb shell input swipe 540 500 540 1300 500 //上滑 adb shell "seq 3 | while read i;do input tap 350 1050 & input tap 350 1050 &sleep 0.01;done;" //点赞 adb shell input keyevent 26 //锁屏最终实现效果
现在有了基本的代码模型,和控制手机的具体指令,接下来的工作就是在数据处理的部分,执行adb指令了,显然,使用system函数就可以:
int main () { int fd ; int ret; pthread_t read_thread; pthread_t write_thread; if ((fd = myserialOpen ("/dev/ttyS5", 115200)) < 0) //打开驱动文件,配置波特率 { fprintf (stderr, "Unable to open serial device: %s\n", strerror (errno)) ; return 1 ; } /* if (wiringPiSetup () == -1) { fprintf (stdout, "Unable to start wiringPi: %s\n", strerror (errno)) ; return 1 ; }*/ ret = pthread_create(&read_thread,NULL,read_serial,(void *)&fd); if(ret != 0){ printf("read_serial create error\n"); return 1; } ret = pthread_create(&write_thread,NULL,write_serial,(void *)&fd); if(ret != 0){ printf("write_serial create error\n"); return 1; } pthread_join(read_thread,NULL); pthread_join(write_thread,NULL); return 0 ; }和项目需求一致,可见,我的手并没有碰到手机屏幕,只是说出了对应的指令,手机就会有所反应:

并且在香橙派终端也可以看到指令历史:
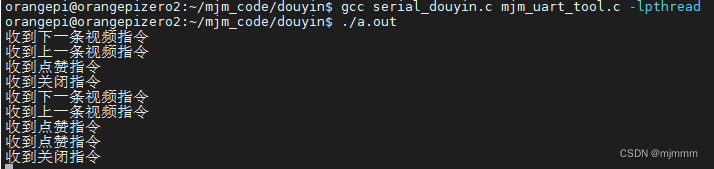
-
百问网Avaota A1 T527开发板发布在 T Series
全志科技T527采用多核异构设计,集成了CPU、GPU、NPU、DSP、MCU等各种计算单元,为各种复杂场景的多任务处理、专用数据处理以及算法应用提供了高效且灵活的解决方案,为生成式AI、人工智能算法的场景化落地提供了坚实的硬件基础。
为了方便开发者进行产品预研和项目开发,百问网推出了搭载全志T527芯片的AvaotaA1开发板。AvaotaA1是一款硬件+软件全开源的卡片电脑,提供全面开放的软硬件资料,小巧的板型搭载了8核处理器并引出了丰富的外部资源,还支持Avaota OS、Android13、Armbian等多种操作系统。
硬件资源
AvaotaA1开发板采用98mm x 73mm的接口丰富易用SBC板型设计,可以很好的兼容目前市面上的绝大多数主流开发板,在足够的板型尺寸下,开发板板载了500+元器件、14个外设接口以及40个拓展GPIO口。


- CPU: 八核 Cortex-A55,最高可达 1.8GHz
- GPU: Mali G57,支持 OpenGL ES 3.2/2.0/1.1,Vulkan 1.1/1.2/1.3,OpenCL 2.2
- RCPU: XuanTie E906 RISC-V @ 200MHz
- DSP: HIFI4 DSP @ 600MHz
- NPU: 可选最高可达 2TOPS 的计算能力
- 内存芯片: 支持 LPDDR4,可选 1/2/4GB
- 存储芯片: 支持 eMMC 5.1,可选 16/32/64/128GB
- 相机: MIPI CSI 接口,支持 1300 万像素,4 路 MIPI CSI
- 网络通信接口: 2 x 千兆以太网,WIFI6 2.4G + 5G,BT5.4
- USB 接口: 包括 USB OTG,USB3.0 OTG,USB2.0 HOST
- 音频接口: 3.5mm 音频接口,具有录音功能
- 显示接口: 包括 RGB 接口,MIPI DSI 接口,DP 接口,HDMI2.0 接口,LVDS 接口,MIPI DBI 接口
- 其他接口模块: 包括调试串口,TF 卡槽,CAN 接口,RGB LED,红外(IR),UART,IIC,I2S,SPI,PWM
在显示接口方面,AvaotaA1板载了一块240x135@60fps的1.14寸IPS屏,可用于显示LVGL UI、显示输出、显示系统性能等基础功能实现。
结合板载的HDMI、DP、MIPI/RGB/LVDS显示接口,AvaotaA1能够轻松实现4K60以及4K+1080P双屏异显的功能场景,结合NPU以及全志自研的新一代画质引擎,可支持AI超分等画质增强算法,提供更佳的显示体验。


软件系统支持
AvaotaA1支持专为Avaota SBC系列所打造的Avaota OS,Avaota OS是基于Ubuntu的特殊定制版,借助于Avaota SBC提供的性能和功能,Avaota OS在Ubuntu的基础上进行了深度优化,为用户提供了一体化的操作系统体验。
Avaota OS不仅继承了Ubuntu的强大功能和稳定性,还增加了许多独特的特色功能。这些功能包括针对Avaota硬件的优化,如支持特定的传感器和接口,以及预先配置的软件包,以满足各种应用场景的需求。并通过对系统内核、资源管理和功耗控制的调整,以提供优异的性能和稳定性。
除了百问网支持的专属Avaota OS,AvaotaA1也支持Android13、Buildroot、Armbian、Openwrt等多种适用于不同应用领域的操作系统,并附上了详尽的移植教程。

开发板购买&资料获取
目前R128 Devkit全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含2+16和4+32两种裸板配置的绿色AvaotaA1 SBC,并可自行选购Type-C USB调试器:
- 2GB+16GB裸板:249元
- 4GB+32GB裸板:349元
- Type-C USB调试器:49.9元
另外关于AvaotaA1开发板的硬件设计、数据手册、软件系统源码等所有资料都在Avaota官方网站上开源,并配置了详尽的开发文档供开发者学习,感兴趣的小伙伴可以复制以下链接或者点击【阅读原文】获取更多详细资料。
AvaotaA1开发板文档:
https://docs.avaota.fun/avaota-sbc/
-
PhoenixSuit烧录工具四种烧录模式说明发布在 其它全志芯片讨论区
如图所示,分四种烧录模式分别是:单或多分区下载、保留数据升级、分区擦除升级和全盘擦除升级。
下面对四种烧录模式进行说明:
- 单或多分区下载:用户加载固件之后,会从固件信息读取到MBR表的分区信息,然后将每个分区名字显示在UI上提供可选择单或多个分区烧录,若全部不选择,则默认下载物理分区的boot0和boot1。
- 保留数据升级:此模式仅擦除sys_partition配置的分区,但不包含udisk或user_data分区的数据。
- 分区擦除升级:此模式仅擦除sys_partition配置的分区,与“保留数据升级”相反,擦除包含udisk或user_data。
- 全盘擦除升级:顾名思义,就是将flash进行初始化,所有的数据将会被擦除
-
回复: YuzukiChameleon,xr829扫卡失败[XRADIO_ERR] mac address not found in efuse.发布在 H/F/TV Series
看看这个帖子有没有帮助:
【FAQ】全志D1芯片 XR829扫卡失败问题排查
https://bbs.aw-ol.com/topic/757/share/1
-
T113在内核中采用硬解jpeg方式实现开机动画发布在 其它全志芯片讨论区
参考几位大神的logo替换方法以及相关问题:
主要实现思路:在kernel中,将jpg图片通过VE解码,连续显示形成动画。先将视频按帧截取成jpg图片,打包成特定格式的二进制文件。把资源包放入到一个指定分区中,在uboot阶段加载资源包,并告知kernel将资源包的内存区域保留出来。
资源包制作
int test_pic(int argc, char **argv) { FILE *fp_in; FILE *fp_out; int rc; char bmpfile[1024] = {0}; char path_out[1024] = {0}; int i = 0; char buffer[4096]; unsigned int length = 0; int pic_num = 100; if (argc > 3) { pic_num = atoi(argv[3]); } printf("pic_num:%d\n", pic_num); sprintf(path_out, "%s", argv[2]); printf("output:%s\n", path_out); fp_out = fopen(path_out, "wb+"); if (fp_out == NULL) { printf("Open file %s error\n", bmpfile); return (-1); } fwrite(&pic_num, 4, 1, fp_out); for (i = 0; i < pic_num; i++) { sprintf(bmpfile, "%s/1 (%d).jpg", argv[1], i + 1); fp_in = fopen(bmpfile, "rb"); if (fp_in == NULL) { printf("Open file %s error\n", bmpfile); return (-1); } length = get_file_size(bmpfile); if (length < 1) { printf(" file %s error\n", bmpfile); return (-1); } fwrite(&length, 4, 1, fp_out); while (!feof(fp_in)) { rc = fread(buffer, 1, 1024, fp_in); if (rc < 1) printf("file %s error\n", bmpfile); fwrite(buffer, 1, rc, fp_out); } fclose(fp_in); } fclose(fp_out); return 0; }将所有图片打包成一份二进制文件,并命名为animation.fex,文件内容格式如下:
图片总数量 第一张图片大小(int) 第一张图片内容 第二张图片大小(int) 第二张图片内容 依此类推 int int char 数组 int char 数组 。。。 使用方法:
./bin/demo [图片路径] [资源包路径] [图片数量]如:
./bin/demo bin/Capture100/ bin/animation.fex 90log输出:
pic_num:90 output:bin/animation.fex资源包的制作和内核中读取的格式相对应,如有需要可自行拓展。
资源包存放
新建一个分区
diff --git a/configs/demo2.0/longan/sys_partition.fex b/configs/demo2.0/longan/sys_partition.fex index c67aca3..1e12607 100755 --- a/configs/demo2.0/longan/sys_partition.fex +++ b/configs/demo2.0/longan/sys_partition.fex @@ -68,9 +68,9 @@ size = 16384 ;------------------------------>mmcblk0p6/nand0p6 [partition] - name = recovery - size = 231072 - ;downloadfile = "recovery.fex" + name = animation + size = 102400 + downloadfile = "animation.fex" user_type = 0x8000 ;------------------------------>mmcblk0p7/nand0p7 diff --git a/pack b/pack index d57362b..77e7b1f 100755 --- a/pack +++ b/pack @@ -164,6 +164,7 @@ ${LICHEE_COMMON_CONFIG_DIR}/tools/cardscript.fex ${LICHEE_COMMON_CONFIG_DIR}/tools/cardscript_secure.fex ${LICHEE_CHIP_CONFIG_DIR}/tools/cardscript.fex ${LICHEE_CHIP_CONFIG_DIR}/tools/cardscript_secure.fex +${LICHEE_CHIP_CONFIG_DIR}/tools/animation.fex ${LICHEE_COMMON_CONFIG_DIR}/tools/cardtool.fex ${LICHEE_CHIP_CONFIG_DIR}/tools/cardtool.fex ${LICHEE_COMMON_CONFIG_DIR}/tools/usbtool.fexuboot修改
合入补丁
通过
CONFIG_ANIMATION_MEM_RESERVE控制功能的开启关闭。
从emmc读取整个分区,分区越大耗时越久,可适当减少分区大小。
kernel修改
合入补丁通过
CONFIG_ANIMATION_MEM_RESERVE宏开启
注意编解码VE和显示DE驱动代码的初始化的先后顺序
-
交叉编译NumCpp到ARM上的方法(以全志V853为例)发布在 V Series
前段时间,在电脑上安装了Ubuntu/Windows系统双系统,现在拿Ubuntu系统试试水。
NumCpp是类似Numpy的C++版本,可以方便的进行一些矩阵的操作,现在我们来把它交叉编译到ARM上去。
1. 获取源码
要交叉编译NumCpp,首先要获取依赖库boost源代码以及NumCpp的源代码。
在这里我使用的是boost1.68,可以从下面这个网址下载。
https://www.boost.org/Boost C++ Libraries https://www.boost.org/NumCpp可以从GitHub上clone下来
https://github.com/dpilger26/NumCppGitHub - dpilger26/NumCpp: C++ implementation of the Python Numpy library C++ implementation of the Python Numpy library. Contribute to dpilger26/NumCpp development by creating an account on GitHub. https://github.com/dpilger26/NumCpp2. 交叉编译boost
将下载好的压缩包解压。
cd boost_1_68_0 ./bootstrap.sh --with-libraries=all --with-toolset=gcc其中,--with-libraries可以选择自己想要安装的库。
执行完这一步之后,打开新生成的project-config.jam,修改下面这几行中的gcc部分。一定要注意空格!(每一个空格缺一不可),其中的arm-openwrt-linux-gcc的路径可以换成你的交叉编译器的路径
if ! gcc in [ feature.values <toolset> ] { using gcc : arm : /home/xinzhe/toolchains/rootfsbuilt/arm/toolchain-sunxi-musl-gcc-830/toolchain/bin/arm-openwrt-linux-gcc ; }之后执行
./b2检查输出的log中的编译器是否已经是交叉编译器,然后再执行
./b2 install --prefix=/home/xinzhe/Documents/boost_arm其中--prefix后面是你想要的boost库安装路径。
安装完成后,检查安装的boost库是否为ARM版本。
3.交叉编译NumCpp
Clone完成NumCpp之后,进入NumCpp文件夹。
由于我之前编译过x86-64版本的NumCpp,因此在编译ARM版本的时候,需要修改CMakeLists.txt,让cmake找到ARM版本的boost库。
在CMakeLists.txt中寻找Boost有关代码的上方加入
set(CMAKE_FIND_ROOT_PATH /home/xinzhe/Documents/boost_arm) set(CMAKE_FIND_ROOT_PATH /home/xinzhe/Documents/boost_arm) if(NUMCPP_NO_USE_BOOST) target_compile_definitions(${ALL_INTERFACE_TARGET} INTERFACE -DNUMCPP_NO_USE_BOOST) else() find_package(Boost 1.68.0 REQUIRED COMPONENTS date_time ) target_link_libraries(${ALL_INTERFACE_TARGET} INTERFACE Boost::boost $<$<OR:$<CXX_COMPILER_ID:Clang>,$<CXX_COMPILER_ID:GNU>>:Boost::date_time> ) endif()同时,在NumCpp文件夹里,创建一个Compile.cmake文件,来指定交叉编译器。内容如下:
set(CMAKE_SYSTEM_NAME Linux) set(TOOLCHAIN_PATH /home/xinzhe/toolchains/rootfsbuilt/arm/toolchain-sunxi-musl-gcc-830/toolchain/arm-openwrt-linux-muslgnueabi) set(CMAKE_C_COMPILER /home/xinzhe/toolchains/rootfsbuilt/arm/toolchain-sunxi-musl-gcc-830/toolchain/bin/arm-openwrt-linux-gcc) set(CMAKE_CXX_COMPILER /home/xinzhe/toolchains/rootfsbuilt/arm/toolchain-sunxi-musl-gcc-830/toolchain/bin/arm-openwrt-linux-g++)其中的TOOLCHAIN_PATH、CMAKE_C_COMPILER、CMAKE_CXX_COMPILER替换成自己的交叉编译工具。
然后在NumCpp文件夹下执行下面的操作
mkdir build cd build cmake .. -DCMAKE_TOOLCHAIN_FILE=../Compile.cmake然后检查输出的log中,C编译工具是否为交叉编译工具,以及找到的boost库是否为我们刚刚创建的ARM版本的。
检查完毕后,修改/NumCpp/build目录下的cmake_install.cmake,修改其中的CMAKE_INSTALL_PREFIX为自己想要安装的目录。
# Install script for directory: /home/xinzhe/Documents/NumCpp # Set the install prefix if(NOT DEFINED CMAKE_INSTALL_PREFIX) set(CMAKE_INSTALL_PREFIX "/home/xinzhe/Documents/boost_arm") endif() string(REGEX REPLACE "/$" "" CMAKE_INSTALL_PREFIX "${CMAKE_INSTALL_PREFIX}")然后执行:
cmake --build . --target install我们就在boost_arm下得到了ARM版本的boost和ARM版本的NumCpp的编译结果文件
4. 编译自己的代码
创建NumCpp_arm文件夹,放入自己的main.cpp,并创建Compile.cmake(同上),CMakeLists.txt。
其中CMakeLists.txt代码如下:
cmake_minimum_required(VERSION 3.20) project("HelloWorld" CXX) add_executable(${PROJECT_NAME} main.cpp) set(CMAKE_FIND_ROOT_PATH /home/xinzhe/Documents/boost_arm) set(CMAKE_CXX_STANDARD 17) set(CMAKE_CXX_FLAGS "-g -std=c++17 -lstdc++fs") find_package(NumCpp 2.10.1 REQUIRED) target_link_libraries(${PROJECT_NAME} NumCpp::NumCpp stdc++fs )其中的CMAKE_CXX_FLAGS的设置,以及stdc++fs添加到target_link_libraries里,是为了防止一下的报错。
xinzhe@xinzhe-G3-3590:~/Documents/NumCpp/examples/NumCpp_arm/build$ make Consolidate compiler generated dependencies of target HelloWorld [ 50%] Linking CXX executable HelloWorld CMakeFiles/HelloWorld.dir/main.cpp.o: In function `std::filesystem::exists(std::filesystem::__cxx11::path const&)': main.cpp:(.text._ZNSt10filesystem6existsERKNS_7__cxx114pathE[_ZNSt10filesystem6existsERKNS_7__cxx114pathE]+0x1c): undefined reference to `std::filesystem::status(std::filesystem::__cxx11::path const&)' CMakeFiles/HelloWorld.dir/main.cpp.o: In function `std::filesystem::__cxx11::path::path<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::filesystem::__cxx11::path>(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::filesystem::__cxx11::path::format)': main.cpp:(.text._ZNSt10filesystem7__cxx114pathC2INSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEES1_EERKT_NS1_6formatE[_ZNSt10filesystem7__cxx114pathC5INSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEES1_EERKT_NS1_6formatE]+0x60): undefined reference to `std::filesystem::__cxx11::path::_M_split_cmpts()' collect2: error: ld returned 1 exit status make[2]: *** [CMakeFiles/HelloWorld.dir/build.make:98: HelloWorld] Error 1 make[1]: *** [CMakeFiles/Makefile2:83: CMakeFiles/HelloWorld.dir/all] Error 2 make: *** [Makefile:91: all] Error 2然后,我们执行一下操作
mkdir build cd build cmake .. -DCMAKE_TOOLCHAIN_FILE=../Compile.cmake检查输出的log,交叉编译工具对不对,boost与NumCpp是否为ARM版本。
最后执行
make下面的是我的编译结果,可以看到编译成功
xinzhe@xinzhe-G3-3590:~/Documents/NumCpp/examples/NumCpp_arm/build$ make [ 50%] Building CXX object CMakeFiles/HelloWorld.dir/main.cpp.o [100%] Linking CXX executable HelloWorld [100%] Built target HelloWorld检查一下生成的可执行文件是够为ARM版本。
xinzhe@xinzhe-G3-3590:~/Documents/NumCpp/examples/NumCpp_arm/build$ file HelloWorld HelloWorld: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-musl-armhf.so.1, with debug_info, not stripped5.移植到V853上
将HelloWorld文件和boost_arm整个文件夹push到板子上
xinzhe@xinzhe-G3-3590:~/Documents/NumCpp/examples/NumCpp_arm/build$ adb push HelloWorld /root HelloWorld: 1 file pushed. 3.6 MB/s (2607428 bytes in 0.684s)然后到HelloWorld所在目录下执行
root@TinaLinux:~# export LD_LIBRARY_PATH=/root/boost_arm/lib:$LD_LIBRARY_PATH可以看到我的HelloWorld正常执行
root@TinaLinux:~# ./HelloWorld [[0.452916, 0.119087, -0.459488, -0.733428, 0.374606, 0.244954, -0.237323, -0.109258, 0.907443, -0.413274, -0.157849, 0.158918, 0.0474297, -0.519952, 1.38254, -0.174767, -0.911914, -0.812675, -0.506005, -0.222257, -0.192745, -1.04207, 0.424627, 0.217617, 0.277484, -0.0261248, -0.0865481, -0.371074, -0.275607, 0.937942,到这里,交叉编译就完成啦,希望各位小伙伴也能顺利进行!
原文链接:https://blog.csdn.net/where_are_u/article/details/129863901
-
又进化了!T113智能家居86盒圆屏版(圆屏加一体化驱动板+CNC外壳+炫酷LVGL UI)发布在 爱搞机专区
PCB产品发车QQ群号:787148555 ——繁花T113板(太极派)交流群
PCB产品发车QQ群号:787148555 ——繁花T113板(太极派)交流群
PCB产品发车QQ群号:787148555 ——繁花T113板(太极派)交流群
文末有详细PCB发车介绍
流畅到要设置帧率限制的神之眼/符玄个性时钟

巨丝滑的高清高帧率视频播放

如上,你所见到的这款圆滚滚的小玩意,就是魔改了一款在前几期的文章中我们所介绍过的,一款方形的T113-S3智能家居86盒,原项目因其验证过的原理图和PCB(√),可初始化的屏幕(√),详尽的SDK和保姆级的部署教程(√),从而受到了不少开发者的关注,其中也包括一些爱整活的小伙伴。
于是萨纳兰的黄昏在86盒的原作者FanHuaCloud大佬加持下,又给86盒挖了个新坑,为了解决之前ESP32所驱动圆屏只能播放MJPEG并且帧率较低的尴尬问题,集圆屏加一体化驱动板+外壳+炫酷LVGL UI于一身的圆形86盒横空出世,并命名其为——T113太极派。
硬件设计简介
T113太极派可以简单理解为是方形86盒的圆形改版,两者在硬件的设计上大体相同,圆屏由于面积较小,元件排列比方形的困难许多,调整了很久的布局,只是调整了背光芯片以及其它部件的PCB布局走线。
01、全志T113-S3主控,双核A7,内存128M,支持硬件解码,和D1s Pin to Pin,支持相互替换
02、7701S 2.1寸SPI RGB接口圆屏,带触摸
03、RTL8723 WIFI模块,用于连接网络
04、128MB SPI Nand,支持从SPI Nand启动系统
05、双USB接口,其中一个支持Host/Device,另一个仅支持Host
06、板载麦克风和一个耳机口
07、支持Typec口接DAC小尾巴输出音频
目前的版本是插电使用的超薄版本 ,后续可能会增加带扩展版的支持电池的充电版本,其最主要的特点是作者为这款圆形的太极派专门给它建模做了一个极其轻薄的CNC外壳,触摸屏直径是71.8mm,外壳直径为74mm。树脂版外壳厚度为13mm,CNC版外壳厚度为10mm。

软件系统及UI界面适配
APP是设备的灵魂,肯定不能只跑个lvgl demo看看那些图形蹦来蹦去最后得个数字。前面做的这一切,都是为了将之前的代码移植过来。本APP使用LVGL 8.3.11编写。目前有以下功能(方屏版和圆屏板都可用,相同的功能在不同形状的屏幕上会有不同的表现形式)
AIDA64无线副屏
原理很简单,电脑端开启AIDA64,新建一个Remote Panel,将指定的设备信息设置为指定格式后放上去,本设备在联网后就会定时获取信息,并动态展示。目前该界面还是为方屏设计的,圆屏还没有特别好的创意,等有了再改。

音乐频谱节拍器
同样针对方屏和圆屏做了两套不同的UI,不但UI不同,而且频谱样式也不同,方屏是条形频谱,圆形是放射形渐变频谱。频谱的实现是由全志的Tplayer的音频回调函数将PCM信息推送给对应的FFT进程,然后FFT计算后推送给页面展示来实现的。另:全志的tplayer有bug,如果设置单曲循环,且播放的音乐为flac格式,在音乐播放完,跳转会开头的时候会出错。为解决这个问题,APP在遇到flac音乐单曲循环的时候,会重新初始化该音乐。
又是频谱,没错我就是频谱星人。拾音频谱做了专属样式,实现是通过alsa接口读取麦克风PCM数据,然后同样推送给FFT进程。圆形版本的拾音频谱叠加了视频背景(视频背景由b站up主渣渣一块钱4个制作)。


动态天气时钟
以之前HTC手机的那个动态天气动画作为背景的时钟,根据不同的天气加载不同的动态背景,使用了高德天气API。

神之眼/符玄个性时钟
移植了之前做的一些个性主题时钟,比如随机星座时钟等,比较二次元,结合全志硬解视频功能,支持mp4视频播放作为动态背景 有兴趣的可以看我相关的视频展示。效果见文首视频连接


视频/相册播放器
针对方屏和圆屏做了两套不同的UI。除了按钮功能外,在屏幕右侧区域上下滑是调节音量,左侧区域上下滑调节亮度,中间区域左右滑调节进度。总之,将全志t113的硬件解码功能全部解锁出来,并配上lvgl播放器UI~


SDK系统
修掉了很多问题,直接编译可用,后续提供一键编译的虚拟机(不含视频演示ui相关),可以很好解决初学者反复踩坑环境搭建问题。
SDK中已经集成了我的APP所用到的一切库,如
- fftw3:FFT库
- Libjpeg:改为了最新的版本
- Taglib:读取音乐文件里面的图像
开源资料获取
本文所有内有内容均转载自原作者本人的B站视频账号及立创开源硬件平台的工程页面,文章内所提到的圆形86盒硬件设计不开源,可以参考方形的86盒PCB设计,可以直接使用的SDK已开源在帖子内,感兴趣的小伙伴可以复制下方链接或者戳文末的“阅读原文”获取。
- 作者萨纳兰的黄昏个人网站:https://pressf5.run/
- B站视频介绍:https://www.bilibili.com/video/BV1ip421m77K
- 方形PCB参考及开源SDK获取:https://oshwhub.com/planevina/t11386-box-revision
关于发车:QQ群号:787148555
目前圆屏pcb添加了一个接喇叭的功放电路,正在打样验证,预计下周初即验证完,然后就会准备smt事项。具体一个板子多少钱会根据到时候贴的数量来看,多就会便宜点少就会贵点。
- 程序:买了板子的免费激活视频中展示的程序。
- 外壳:样品已用fdm打印验证过,树脂版的已下单三维猴验证,同样下周可验证完。会在群内直接提供stl文件供自己打印(也有可能统一下单三维猴树脂打印)。我个人非常喜欢cnc壳,看到时候有没有人一起凑一凑去加工一些。
- sdk:可使用繁花在立创上开源的那个,后面也会再整理一套
-
【R128】外设模块配置——USB外设功能配置发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
USB 外设功能配置
USB 功能简介
USB 功能模块包括了USB Host,USB Device 和OTG 功能。
USB Host 目前已经支持上的功能有:Mass Storage,UVC。
USB Device 目前已经支持上的功能有:ADB,UAC。
OTG 主要用作Host 与Device 的切换,如当板子通过 USB 线连接到 USB 主机 (PC) 上时,
此时 OTG 是加载成 USB Device;若当前板子是通过 OTG 线连接一个USB 设备,此时 OTG 则加载
成 USB Host。USB 外设特性
- Complies with USB 2.0 Specification
- Supports High-Speed (HS, 480-Mbps), Full-Speed (FS, 12-Mbps), and Low-Speed (LS, 1.5-Mbps) in Host mode
- Supports High-Speed (HS, 480 Mbps), Full-Speed (FS, 12 Mbps) in Device mode
- Supports the UTMI+ Level 3 interface. The 8-bit bidirectional data buses are used
- Supports bi-directional endpoint0 for Control transfer
- Supports up to 8 User-Configurable Endpoints for Bulk, Isochronous and Interrupt bi-directional transfers (Endpoint1, Endpoint2, Endpoint3, Endpoint4)
- Supports up to (4KB+64Bytes) FIFO for EPs (Including EP0)
- Supports High-Bandwidth Isochronous & Interrupt transfers
- Automated splitting/combining of packets for Bulk transfers
- Supports point-to-point and point-to-multipoint transfer in both Host and Peripheral mode
- Includes automatic ping capabilities
- Soft connect/disconnect function
- Performs all transaction scheduling in hardware
- Power Optimization and Power Management capabilities
- Includes interface to an external Normal DMA controller for every Eps
USB 配置介绍
sys_config.fex配置说明sys_config.fex 中主要是对 OTG 功能进行配置,各个配置的含义可如下所示:
Key Value [usbc0] 控制器0的配置。 usb_used: USB使能标志。置1,表示系统中USB模块可用,置0,则表示系统USB禁用。 usb_port_type USB端口的使用情况。 0: device only;1: host only;2: OTG;usb_detect_type: USB usb_detect_mode USB端口的检查方式。0: 线程轮询;1: id中断触发 usb_id_gpio USB ID pin脚配置。具体请参考gpio配置说明。 usb_det_vbus_gpio USB DET_VBUS pin脚配置。具体请参考gpio配置说明。 usb_drv_vbus_gpio USB DRY_VBUS pin脚配置。具体请参考gpio配置说明。 usb_drv_vbus_type vbus设置方式。0: 无; 1: gpio; 2: axp。 usb_det_vbus_gpio "axp_ctrl",表示axp 提供。 usbh_driver_level usb驱动能力等级 usbh_irq_flag usb中断标志 示例:
;-------------------------------- ;--- USB0控制标志 ;-------------------------------- [usbc0] usb_used = 1 usb_port_type = 2 usb_detect_type = 1 usb_detect_mode = 0 usb_id_gpio = port:PB04<0><0><default><default> usb_det_vbus_gpio = port:PA24<0><0><default><default> usb_drv_vbus_gpio = port:PA29<1><0><default><default> usb_drv_vbus_type = 1 usbh_driver_level = 5 usbh_irq_flag = 0rtos menuconfig 配置说明
- 使能USB 驱动
‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers [*] USB- 使能OTG
‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers [*] USB_MANAGER- 使能USB Host
使能完USB Host 之后,还需要选择:OHCI 与EHCI(一共有0 和1 两组,对于R128 来说,只需要使能USB0)。另外,还要选择功能驱动(Mass Storage,UVC),不然只是使能USB Host 则无法正常运行USB Host 的功能。
USB Host 控制器驱动配置如下:
USB Host ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers [*] USB_HOST OHCI ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB HOST [*] USB_OHCI_0 EHCI ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB HOST [*] USB_EHCI_0- 使能USB Device
USB Device 除了UDC 的使能之外,也需要选择对应的功能驱动Gadget 以及功能驱动对应的上层应用。
USB Device 控制器驱动配置如下:
USB Device ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers [*] USB_DEVICE USB Device使能dma通信 ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB DEVICE [*] UDC_USE_DMAUSB 源码结构
lichee/rtos‑hal/hal/source/usb ├── common/ ├── core/ ├── gadget/ │ ├── function/ ├── hid/ │ ├── Class/ │ ├── Client/ │ │ ├── KeyBoard/ │ │ └── Mouse/ │ ├── Include/ ├── host/ ├── include/ ├── manager/ ├── platform/ ├── storage/ │ ├── Class/ │ ├── Disk/ │ ├── include/ │ └── Misc/ ├── udc/ └── uvc/ ├── Class/ ├── drv_webcam/ │ ├── dev_cfg/ │ └── webcam_core/ ├── Include/ ├── Misc/ └── Webcam/- common: USB 驱动初始化公用文件。
- core: USB Host 驱动框架层文件。
- gadget: USB Deivce 功能驱动gadget 驱动总入口文件,function 则是各个功能驱动的驱动文件。
- hid: USB Host HID 协议及驱动文件。
- host: USB Host 硬件控制器驱动。
- include: USB 公用头文件。
- manager: USB OTG 驱动。
- platform: 不同平台的配置文件。
- storage: USB Host Mass Storage 协议及驱动文件。
- udc: USB Deivce 硬件控制器驱动。
- uvc: USB Host UVC 协议及驱动文件。
详细说明请见:HAL USB
USB 常用功能说明
配置OTG 功能
OTG 功能下,需要根据USB ID 脚去进行Device/Host 模式的切换;如果需要支持NULL 模式(既不加载Device 也不加载Host 驱动), 那么还需要VBUS 状态检测引脚。
涉及到的主要改动点:
在sys_config.fex,修改如下配置: usb_port_type配置为2,即OTG模式。 usb_id_gpio配置对应的USB ID引脚。 usb_det_vbus_gpio, 需要根据实际情况进行配置: 1.如果需要检测VBUS状态,则按下面情况进行配置: 配置成对应的gpio即可。 2.如果不需要检测VBUS状态(缺少NULL模式) 那么直接填写USB ID的gpio配置(也就是VBUS与ID状态一致)。USB OTG 驱动,会根据ID 和VBUS 的状态,自动切换成对应的模式。ID 和VBUS 的对应关系如下表:
ID VBUS 模式 0 0 Host 1 0 Null 0 1 Host 1 1 Device - ID 脚一般情况下为高电平,只有接入OTG 线时会拉低;
- VBUS 为1 表示micro USB 口有接入外部电源;
- 一般不会出现ID 为0,VBUS 为1 的情况。这表示接入OTG 线,但是还检测到VBUS;
- 如果没有VBUS 检测,ID 只有0 和1 的两种情况, 也就是说要么加载device 驱动,要么加载host 驱动; 这会带来一些影响:usb 相关时钟一直被打开,导致有一定功耗,以及硬件射频。
USB Gadget 功能配置
USB Gadget 支持众多功能,它们的配置方法比较类似,只需要在mrtos_menuconfig 中选上对应的Gadget 功能驱动即可在系统初始化时自动加载。与Linux 不一样的是,RTOS 的gadget 功能配置全部hardcode 在功能驱动里,无需像Linux 一样需要在应用层手动进行gadget 配置。
另外,目前RTOS 的USB 驱动还不支持composite gadget,因此只能支持加载单一的gadget 功能驱动,无法同时多个功能。
ADB 功能
adb 的全称为Android Debug Bridge,就是起到调试桥的作用。通过ADB,可以直接在PC 上通过命令行控制小机端的控制台;也可以通过ADB 进行文件传输。
menuconfig 驱动相关配置:
‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB DEVICE [*] DRIVERS_USB_GADGET_ADBmenuconfig ADBD 应用相关配置:
‑> System components ‑> aw components ‑> USB Components Support ‑> USB Gadget Support [*] adbd service在RTOS 的USB 框架中,一旦加载了adb gadget,就会自动启用adbd 服务,直接连上PC 就可以使用了。
adb 正常启动的相关log:
[usb0] insmod device driver! adbd version:AW‑V1.1.6, compiled on: Apr 11 2023 10:33:24 adbd service init successfulPC 运行效果图如下图所示:
UAC 功能
UAC 全称为USB Audio Class,USB 音频类。
通过UAC,可以实现实时获取音频设备的音频数据,并且通过UAC 实现操控设备音量,采样率,等参数。UAC 实现对外接音频操作,从用户功能来说,主要包括USB 麦克风、USB 声卡和其它音频设备的功能控制和接口标准。
menuconfig 驱动相关配置:
‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB DEVICE [*] DRIVERS_USB_GADGET_UACmenuconfig UACD 应用相关配置:
‑> System components ‑> aw components ‑> USB Components Support ‑> USB Gadget Support [*] uacd service ‑> System components ‑> aw components ‑> USB Components Support ‑> USB Gadget Support ‑> uacd audio function [*] AudioSystem local audiouacd 正常启动的相关log:
[usb0] insmod device driver! uacd version:AW‑V0.5, compiled on: Apr 27 2023 10:44:02 [UACD‑INFO][u_audio_init] line:167 stream=1, rate=48000, ch=2, bits=16, audio_buf_size=192 [UACD‑INFO][u_audio_init] line:167 stream=0, rate=16000, ch=2, bits=16, audio_buf_size=64 [UACD‑INFO][u_audio_stop_capture] line:320 [UACD‑INFO][u_audio_stop_playback] line:457 [UACD‑INFO][u_audio_stop_capture] line:320 [UACD‑INFO][u_audio_stop_playback] line:457启动成功之后,能够在PC 端看到新增了一个音频输入和输出的设备,如下图:
USB Host 功能配置
接入OTG 线后,成功切换成 USB Host 的log 可参考如下:
[ehci‑usb0] insmod host driver! calibration finish, val:0x19, usbc_no:0 ehci insmod status = 1 [usbh core]: add gen_dev SW USB2.0 'Enhanced' Host Controller (EHCI) Driver [D(rv.)] devops: register dev(sunxi_timer) ok USB 0.0 started, EHCI 1.00 [usbh core]: adding sub dev (config #1, interface 0) usb match id suceessfull [hub]: usb hub probe [hub]: 1 port detected [usbh hub]: local power source is good [E(rv.)] pm device sunxi_ehci0(00000000082AE1D0) has already registered [ohci‑usb0] insmod host driver! calibration finish, val:0x19, usbc_no:0 [usbh core]: add gen_dev SW USB2.0 'Open' Host Controller (OHCI) Driver [usbh core]: adding sub dev (config #1, interface 0) usb match id suceessfull [hub]: usb hub probe [hub]: 1 port detected [usbh hub]: local power source is good [D(rv.)] devops: register dev(sunxi_ohci0) okU 盘功能
选上以下配置:
Mass Storage ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB HOST [*] Mass Storage support [*] USB CD support等待U 盘挂载成功,可以发现根目录下多了一个usb_msc 的文件夹,这个即是U 盘挂载的文件夹。可以通过该文件夹与U 盘进行读取/传输文件。
- 目前R128 只支持fat32 文件系统的U 盘,其他文件系统U 盘会挂载失败。
- 只支持挂载单分区的U 盘,如果U 盘被分解成了多个分区的话,只能挂载上第一个分区。
接入U 盘后,系统开始识别U 盘。成功识别到U 盘的log 信息如下:
ehci_irq: highspeed device connect port debounce 0... port debounce 0... port debounce 25... port debounce 50... port debounce 75... hub_port_init: udev address = 0 [hub_port_init]: new high speed USB device address 0 usb hub set new address(2) [usbh core]: adding sub dev (config #1, interface 0) usb match id suceessfull mscDevProbe begin [msc]: GetMaxLUN successful, max lun is 0 begin mscLunAdd disk, send last lun msg......... mscLun‑>LunNo=0 mscLun‑>mscDev‑>MaxLun=1 BlkDev‑>last_lun=1 Wrn: short transfer, urb_state(0), want_len(192), real_len(70) Wrn: short transfer, urb_state(0), want_len(192), real_len(24) ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑Disk Information‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ WriteProtect = 0 MediaPresent = 1 WCE = 0 RCD = 0 capacity = 29532M, sector number = 60481536 sector_size = 512 DevNo = 0 ClassName = DevName = SCSI_DISK_000 ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ hub_port = 1 cnt = 0 Classname = DISK DevName = SCSI_DISK_000 DeviceName = SCSI_DISK_000 Vender = TOSHIBA USB FLASH DRIVE PMAP Product = USB FLASH DRIVE PMAP Serial = PMAP HubPortNo = 1 DeviceType = 2 DiskRead: block(0, 1) is adjacence max capacity(39ae000), can't use special write mount usb mass storage successull!! .............................................................................. [USB Disk]: Register new device, class = [DISK], dev = [SCSI_DISK_000] .............................................................................. end mscLunAdd mscDevScanThread end...然后通过ls 查看usb_msc,可以看到U 盘里的文件:
c906>ls dev data usb_msc c906>ls usb_msc System Volume Information 3.txtUSB 摄像头
选上以下配置:
UVC ‑> Drivers Options ‑> soc related device drivers ‑> USB Drivers ‑> USB HOST [*] USB_CAMERA接上USB 摄像头后,成功识别出摄像头后会出现以下log:
ehci_irq: highspeed device connect port debounce 0... port debounce 0... port debounce 25... port debounce 50... port debounce 75... hub_port_init: udev address = 0 [hub_port_init]: new high speed USB device address 0 usb hub set new address(3) [hub] :skipped 1 descriptor after configuration skipped 6 descriptors after interface skipped 1 descriptor after endpoint skipped 26 descriptors after interface num_ep:0 skipped 1 descriptor after endpoint skipped 4 descriptors after interface num_ep:0 num_ep:0 skipped 2 descriptors after interface skipped 1 descriptor after endpoint [usbh core]: adding sub dev (config #1, interface 0) usb match id suceessfull UVCDevProbe begin Probing generic UVC device device quirks 0x0 Found format MJPEG. ‑ 1920x1080 (30.0 fps) ‑ 1280x720 (30.0 fps) ‑ 640x480 (30.0 fps) ‑ 640x360 (30.0 fps) ‑ 352x288 (30.0 fps) ‑ 320x240 (30.0 fps) ‑ 320x180 (30.0 fps) ‑ 176x144 (30.0 fps) ‑ 160x120 (30.0 fps) ‑ 1920x1080(30.0 fps) Found format YUV 4:2:2 (YUYV). ‑ 1920x1080 (5.0 fps) ‑ 1280x720 (10.0 fps) ‑ 640x480 (30.0 fps) ‑ 640x360 (30.0 fps) ‑ 352x288 (30.0 fps) ‑ 320x240 (30.0 fps) ‑ 320x180 (30.0 fps) ‑ 176x144 (30.0 fps) ‑ 160x120 (30.0 fps) ‑ 1920x1080 (5.0 fps) Found UVC 1.00 device USB 2.0 Camera (0c45:6366) num_altsetting=7 UVC device initialized. DRV_WEBCAM_MInit webcam plug in message... [usbh core]: adding sub dev (config #1, interface 1) [usbh core]: adding sub dev (config #1, interface 2) [usbh core]: adding sub dev (config #1, interface 3)通过log 信息能够看到,在识别出USB 摄像头后,会打印出该摄像头支持的格式以及分辨率。
接着通过uvc 测试命令,对UVC 功能进行测试:
usb uvc_test测试命令调用完成之后,会在/data 目录下生成5 张名为/data/source_frame_x.jpg 的图片。通过adb pull 将图片拉到PC 端,然后在PC 端打开图片即可看到USB 摄像头拍下的照片。
USB 调试方法
USB OTG 功能调试
除了OTG 的自动切换功能,还可以进行手动的切换,需要使用到USB 命令。
USB Device/Host 的手动切换方法:
输入usb ‑h 能够看见usb 的全部命令。
- USB Device 的相关命令
usb udc {‑i|‑r} [<port>] ‑i:指的是指定需要进行切换的USB口。目前R128芯片只有USB0是支持Device模式的。 ‑r:指的是remove,注销当前的Device模式。 比如说将USB0切换成Device模式,则运行: usb udc ‑i 0- USB Host 的相关命令
usb hci {‑i|‑r} [<port>] ‑i:指的是指定需要进行切换的USB口。 ‑r:指的是remove,注销当前的Host模式。 比如说将USB0切换成Host模式,则运行: usb hci ‑i 0USB 相关工具
ADB
ADB 功能是从Android 移植过来的,设备端会运行adbd 服务,而Host 端(一般为PC) 通过adb工具进行调试,如adb shell, adb push/pull 等。
ADB 功能说明
adb shell 功能
PC端执行adb shell,可进入控制台。
PC端执行adb shell + command, 例如adb shell ls /可以直接将结果输出到终端。
adb push/pull 功能
推送文件到小机端: adb push test.bin /data 从小机端拉取文件: adb pull /data/test.bin .
adb 网络连接
如果需要用此功能,需要额外进行menuconfig 的配置,配置方法如下:
‑> System components ‑> aw components ‑> USB Components Support ‑> USB Gadget Support [*] adb local transport (5555) adb local transport portadb local transport port 是用于配置端口号的,用于在adb 网络连接时匹配端口的,默认为5555。
在进行网络adb 连接之前,需要保证PC 和小机端在同一个局域网中,并且可以ping 通。
小机端运行ifconfig,查看当前小机端的IP,假设IP为192.168.1.101。
则PC端执行adb connect 192.168.1.101建立连接,然后就可以开始执行adb shell等命令了。
-
在V853上进行Opencv库的编译步骤发布在 V Series
OpenCV(Open Source Computer Vision)是一个开放源代码的计算机视觉库,它提供了一系列函数和算法,用于处理图像和视频。通过使用OpenCV,您可以进行各种计算机视觉任务,例如图像处理、对象识别、目标追踪、人脸检测和机器学习等。它提供了底层图像处理功能,以及高级功能和模块,如特征提取、边缘检测、图像分割和物体测量等。
当V853需要进行图像的预处理操作时,涉及到使用opencv库中的相关接口和函数。所以如果要基于853进行模型的输入预处理或者输出后处理操作时,就不可避免的要依赖到opencv库。
先获取GitHub中的opencv源码:
https://github.com/opencv/opencv
https://github.com/opencv/opencv_contrib进入目录下,创建build目录:
mkdir build cd build/运行cmake指令配置参数生成Makefile文件:
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=/xxxxx/opencv/opencv_contrib/modules ..当然,如果需要将库外置不编入环境的话可以修改CMAKE_INSTALL_PREFIX的值,直接改为对应路径即可。
选择库的相关指令(指定编译/不编译某些库,优化opencv库大小):指定编译opencv_core库:
-DBUILD_opencv_core=ON指定不编译opencv_hdf库:
-DBUILD_opencv_hdf=OFF使用make指令进行编译:
make -j4make完成并不代表结束,还需要生成opencv库使用。
编译完成后,加上install命令,将其加载/注册到usr文件夹中,这样每次编译 就不用使用一整个opencv库/包了。
make install当编译可执行文件需要链接opencv库时,可以编写一个cmake来编译文件:
# 声明要求的 cmake 最低版本 cmake_minimum_required( VERSION 2.8 ) # 声明一个 cmake 工程 project( test ) #添加OPENMP库 FIND_PACKAGE( OpenMP REQUIRED) if(OPENMP_FOUND) message("OPENMP FOUND") set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} ${OpenMP_C_FLAGS}") set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} ${OpenMP_CXX_FLAGS}") set(CMAKE_EXE_LINKER_FLAGS "${CMAKE_EXE_LINKER_FLAGS} ${OpenMP_EXE_LINKER_FLAGS}") endif() #添加OPENCV库 #指定OpenCV版本,代码如下 ##find_package(OpenCV 3.3 REQUIRED) #如果不需要指定OpenCV版本,代码如下 set(OpenCV_DIR ${CMAKE_SOURCE_DIR}/usr/lib/cmake/opencv4) find_package(OpenCV REQUIRED) #添加OpenCV头文件 include_directories(./ ${OpenCV_INCLUDE_DIRS}) # 添加一个可执行程序 # 语法:add_executable( 程序名 源代码文件 ) add_executable(main ${DIRSRCS} ${NPULIB_DIRSRCS}) # 将库文件链接到可执行程序上 target_link_libraries(main ${OpenCV_LIBS} ${VIP_LIBS} -lstdc++ -lpthread -lrt -lm -ldl)可以看到,该cmake链接了opencv库,
set(OpenCV_DIR ${CMAKE_SOURCE_DIR}/usr/lib/cmake/opencv4)该方法通过链接opencv库中的cmake文件然后来找到对应的opencv包,保证主程序能够顺利调用。
可以在github上下载yolov7处理代码,链接库进行验证。如若cmake生成makefile正常,make编译也正常,成功执行例程过后,opencv库成功生成。
-
【R128】软件配置——RTOS 软件包配置发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
RTOS 软件包配置
本文将介绍 RTOS 软件包、地址,内核配置等。
Kconfig 简介
有过 linux 内核开发经验的人,对 menuconfig 不会陌生。对于各类内核,只要是支持 menuconfig 配置界面,都是使用 Kconfig。
换言之:
- menuconfig:支持配置内核的图形化界面。
- Kconfig:生成 menuconfig 界面的脚本语言。
menuconfig 操作简介
我们运行 mrtos_menuconfig 之后,会打开如下图所示的界面
整个显示界面大致分为三部分
上方是操作的说明和图例说明。

<Enter>按下Enter键进入子菜单。<Y>按下Y键,选中这项功能。<N>按下N键,排除这项功能 。<M>按下M键,以模块的形式选择。<Esc><Esc>按两下Esc键,返回上一级菜单<?>按下?键,查看高亮功能的帮助信息</>按下/键,搜索[*]被选中的项目[ ]未被选择的项目<M>以模块形式被选择的项目< >未被选择的模块
中间部分就是我们要选择的各项功能了,使用上下两个方向键进行选择,也可以使用关键字进行跳转。
最下方是功能选择按钮,功能与案件基本重合。使用左右方向键选择,Enter键选中。

<Select>进入下级菜单< Exit >退回上一级菜单,在最顶层菜单就是退出menuconfig< Help >显示当前选项的帮助信息< Save >手动保存配置文件< Load >加载指定的配置文件,默认加载的是.config
RTOS menuconfig 说明
了解了menuconfig的基本操作,我们再来了解一下 RTOS 的 menuconfig 具体都有是么内容。
Build target sunxi arch
分别选择芯片的系列,对于R128平台,使用的是
sun20iw2p1平台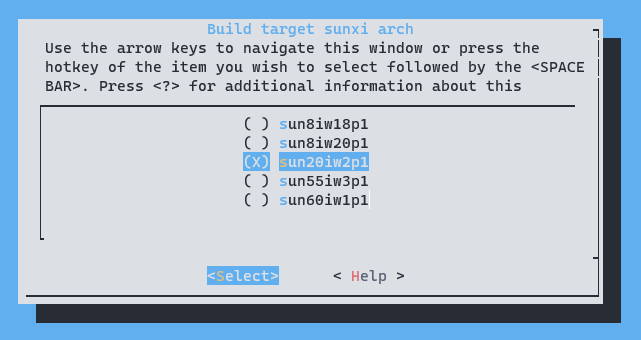
Build OS or Library
选择编译为 Library 还是 OS,这里我们使用的是 OS 所以设置为编译 OS
Build System
这部分配置 RTOS 的配套编译脚手架,配置编译使用的编译工具链的路径,libc的类型等等。
Architecture Options
架构配置,配置CPU的架构,入口地址,分配的内存长度,RV核心的地址,DSP核心的地址。这里也也配置默认启动的核心,可以关闭 C906 和 DSP 核心的启动。
Kernel Options
FreeRTOS 内核相关的配置,一般不需要修改。
Drivers Options
驱动配置,分为
soc related device drivers和other drivers
soc related device drivers
包括各种外设驱动,与驱动的单元测试。
other drivers
包括 WiFi 驱动,蓝牙驱动等等
System components
组件选择,软件包,协议栈等相关选择

aw components
全志提供的相关组件,核间通信组件,多媒体组件等。
thirdparty components
第三方提供的组件,lvgl,协议栈等等
Projects Options
项目配置,选择项目方案
menuconfig 配置保存
完成配置之后,我们可以选择使用左右方向键选择 < save > 并按下Enter键。
如果修改配置文件名称的话,就是将当前的配置另外保存到指定文件;不修改的话默认保存在.config中, 然后选择 ok 确认,就可以继续进行配置了修改了。如果不想保存,那么可以按两下 Esc 键返回。
当然也可以不使用上面的操作,在全部修改都完成之后,连按 Esc 键,就会退出menuconfig。 在退出时会提醒是否保存配置文件,选择 Yes 即可保存配置,如果不想保存可以选择 No , 如果还想继续修改,可以按两下 Esc 键返回 menuconfig 继续修改。
-
实测14us,Linux-RT实时性能及开发案例分享—基于全志T507-H国产平台发布在 创龙科技专区
本文带来的是基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),Linux-RT内核的硬件GPIO输入和输出实时性测试及应用开发案例的分享。本次演示的开发环境如下:
- Windows开发环境:Windows 7 64bit、Windows 10 64bit
- Linux开发环境:Ubuntu18.04.4 64bit
- 虚拟机:VMware16.2.5
- U-Boot:U-Boot 2018
- Kernel:Linux-RT-4.9.170
- SDK:LinuxSDK-V2.0
- GPIO: LED(PI13)、KEY3(PH4)
- 分享案例:rt_gpio_ctrl、rt_input案例
- 测试工具:示波器
测试数据汇总
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,得出如下测试结果。
备注:测试数据与实际测试环境有关,仅供参考。
测试结果如下表所示:
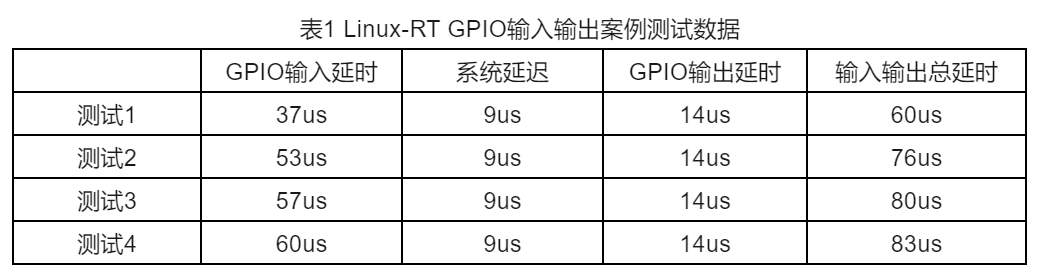
(1)GPIO输入延时:通过使用示波器测量按键事件触发LED电平翻转的实际耗时结合系统延时与GPIO输出延时得出数据;
(2)系统延迟:根据Linux-RT性能测试平均值得出数据;
(3)GPIO输出延时:通过使用示波器测量LED电平翻转的实际耗时得出数据。
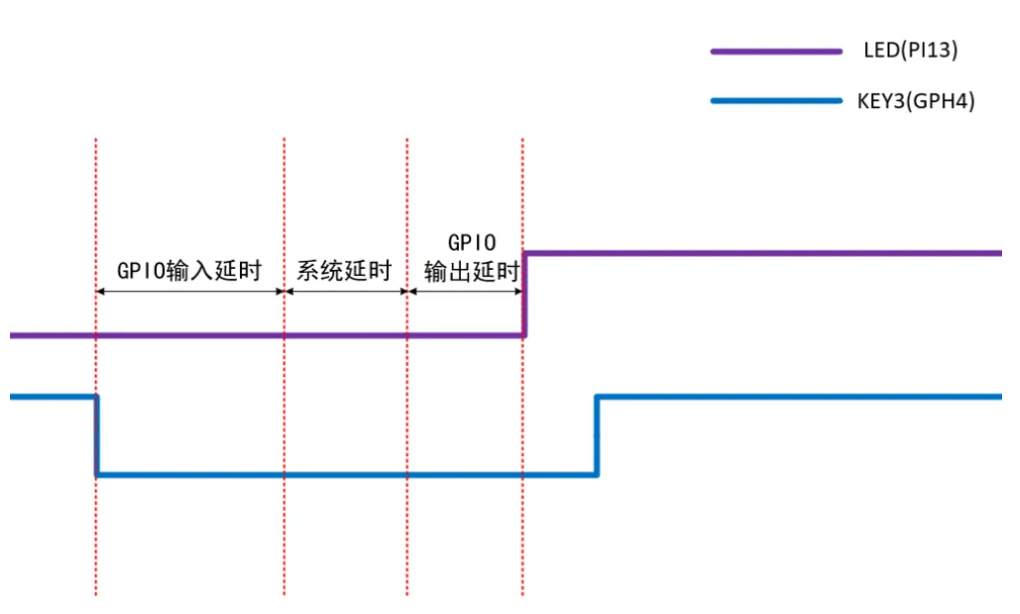
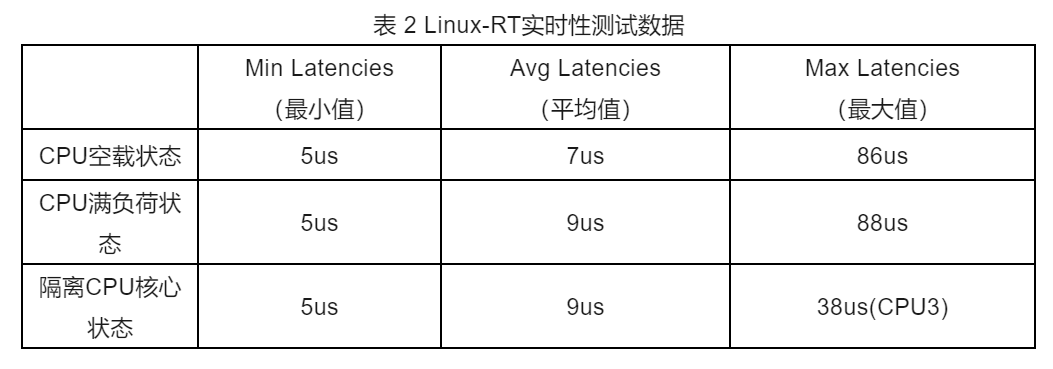
根据不隔离CPU核心、隔离CPU核心三种状态的测试结果可知:当程序指定至隔离的CPU3核心上运行时,Linux系统延迟最低,可有效提高系统实时性。故推荐对实时性要求较高的程序(功能)指定至T507-H隔离的CPU核心运行。
Linux-RT实时性测试
本次测试是使用Cyclictest延迟检测工具测试Linux系统实时性。Cyclictest是rt-tests测试套件下的测试工具,也是rt-tests下使用最广泛的测试工具,一般主要用来测试内核的延迟,从而判断内核的实时性。Cyclictest主要通过反复测量并精确统计线程的实际唤醒时间,以提供有关系统的延迟信息。它可测量由硬件、固件和操作系统引起的实时系统的延迟。
使用Cyclictest测试系统实时性
基于全志T507-H(硬件平台:创龙科技TLT507-EVM评估板),按照创龙科技提供的案例用户手册进行操作,使用Cyclictest程序测试系统实时性,得出如下测试结果。
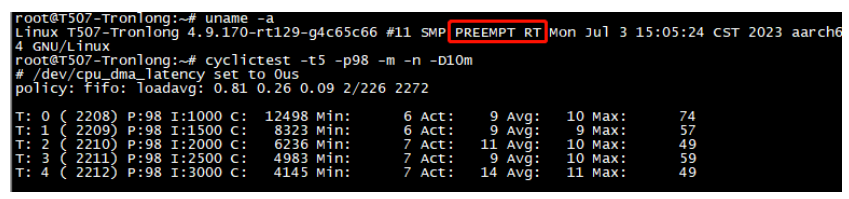
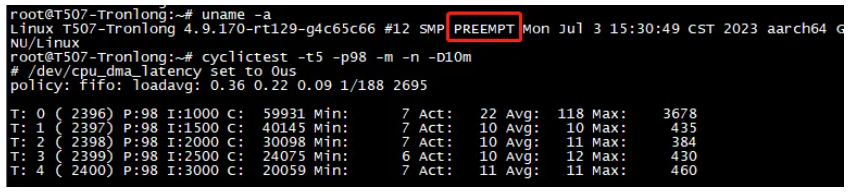
对比测试数据,可看到基于Linux-RT-4.9.170内核的系统的延时更加稳定,最大延时更低,系统实时性更佳。
T507-H核心板典型应用场景
Linux-RT应用案例的分享
rt_gpio_ctrl案例
通过创建一个基本的实时线程,在线程内触发LED的电平翻转,同时程序统计实时线程的调度延时,并通过示波器测出LED电平两次翻转的时间间隔。由于程序默认以最高优先级运行,为避免CPU资源被程序完全占用,导致系统被挂起,因此在程序中增加100us的延时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中,计算出触发LED电平翻转的系统调度延时。
将可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,再按"Ctrl + C"退出测试,串口终端将打印程序统计的延时数据,如下图所示。
Target# ./rt_gpio_ctrl 100
同时使用示波器捕捉LED两次电平翻转之间的间隔就对应上线程调度的延迟。算出电平两次翻转的时间间隔为∆x = 114us,如下图所示。由于程序中默认增加了100us的时间延时。因此,实际延时应为:114us-100us = 14us,与程序统计打印的Latency results平均值相近。
rt_input案例
通过创建一个基本的实时线程,在线程内打开input设备,并对按键事件进行监听,然后触发LED的电平翻转,再通过示波器测量按键触发到LED电平翻转期间的实际耗时。程序原理大致如下:
(1)在Linux-RT内核上创建、使用实时线程。
(2)实时线程中对打开的input设备节点进行按键事件监听,通过判断监听得到的按键事件来触发LED的电平翻转。
将可执行文件拷贝至评估板文件系统,并执行如下命令运行测试程序,程序运行后按下KEY3用户按键点亮LED,松开按键后LED熄灭,再按"Ctrl + C"退出测试程序。
Target#./rt_input /dev/input/event8
分别使用示波器探头1测量按键KEY3引脚1,使用示波器探头2测量LED。
从按键下降沿触发的开始(下图黄线)到LED上升沿触发的完成(下图蓝线)的时间间隔,即为系统实时捕获按键输入时间并响应触发LED电平翻转的时间∆x,从图中可看到∆x = 76us。
-
【R128】应用开发案例——LVGL 与 SPI TFT GUI发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
LVGL 与 SPI TFT GUI
本次使用的是 Dshan_Display Module,如下图:

引脚配置如下:
R128 Devkit TFT 模块 PA12 CS PA13 SCK PA18 MOSI PA9 PWM PA20 RESET PA19 RS 3V3 3.3V GND GND 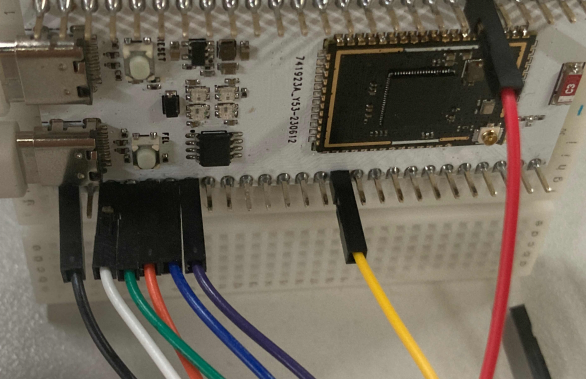
载入方案
我们使用的开发板是 R128-Devkit,需要开发 C906 核心的应用程序,所以载入方案选择
r128s2_module_c906$ source envsetup.sh $ lunch_rtos 1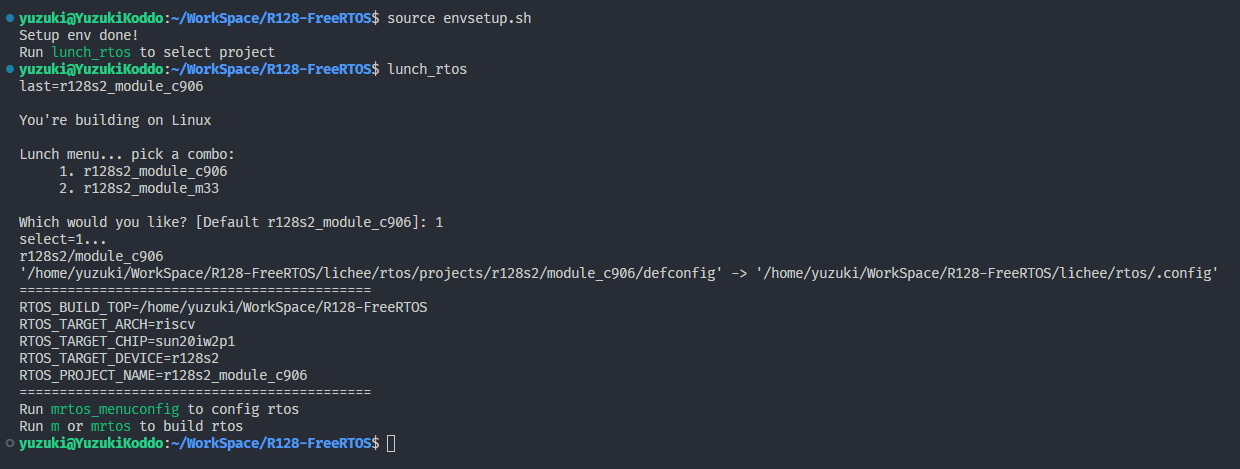
配置 SPI LCD 驱动
驱动配置请参照 《SPI 驱动 TFT LCD 屏》文章进行配置。
配置 LVGL 软件包
运行
mrtos_menuconfig进入配置页面。在如下地址找到勾选相关软件包。System components ---> thirdparty components ---> [*] Littlevgl-8 ---> [*] lvgl examples [*] lvgl-8.1.0 use sunxifb double buffer [*] lvgl-8.1.0 use sunxifb cache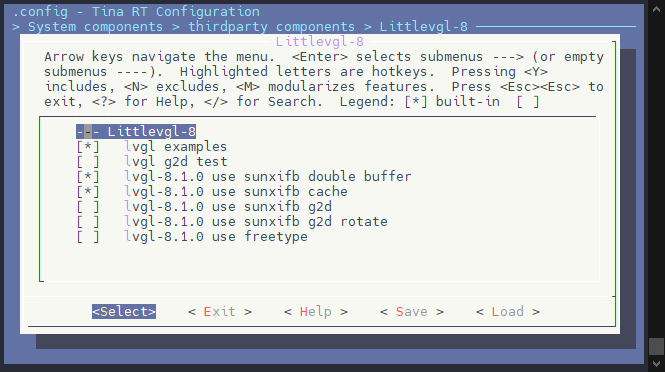
注意,
lv_examples与lv_g2d_test不能同时勾选,否则会报错重复定义错误。
错误如下:
如果出现
update_mbr_failed,请参照常见问题修改分区表增大分区容量修改 LVGL 显示配置
进入
lichee/rtos-components/thirdparty/littlevgl-8/lv_examples/src/lv_conf.h找到LV_COLOR_DEPTH并修改为 16 位,LV_COLOR_16_SWAP置为 1 进行红蓝颜色交换。
测试
编译打包刷写后,在控制台输入
lv_examples可以查看相关命令。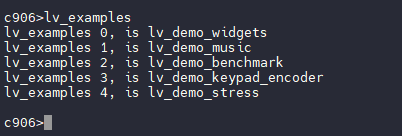
运行
lv_examples 1即可在屏幕显示 LVGL 界面。
-
实测52.4MB/s!全志T3+FPGA的CSI通信案例分享!发布在 创龙科技专区
CSI总线介绍与优势
CSI(CMOS sensor parallel interfaces)总线是一种用于连接图像传感器和处理器的并行通信接口,应用于工业自动化、能源电力、智慧医疗等领域,CSI总线接口示意图如下所示(以全志科技T3处理器的CSI0为例)。
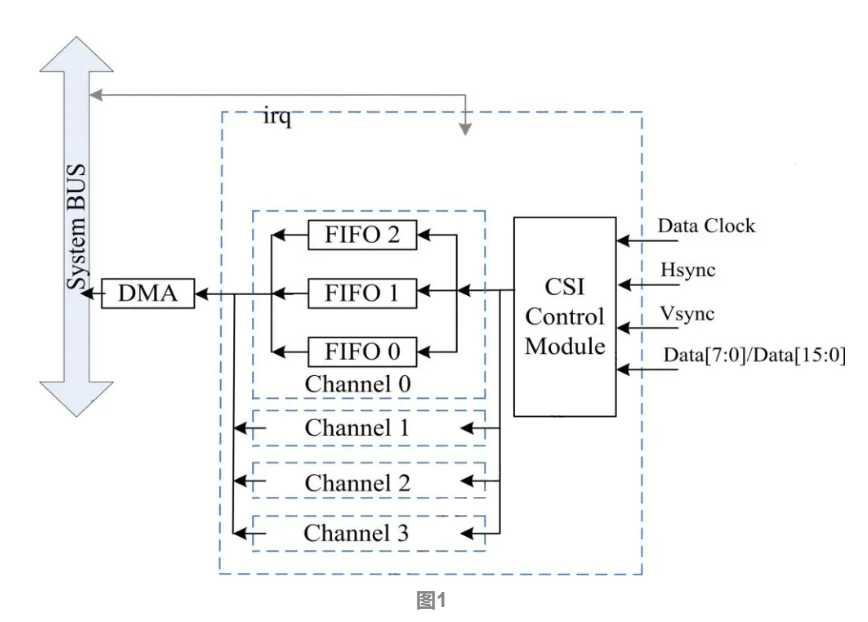
高带宽:CSI总线支持高速数据传输,可以满足多通道高速AD数据的传输需求。
开发难度低:CSI总线采用并行数据和控制信号分离方式,时序简单,FPGA端接口开发难度低。
低成本:CSI总线采用并行传输方式,FPGA端使用资源少,对FPGA器件资源要求低。
国产ARM + FPGA架构介绍与优势
近年来,随着中国新基建、中国制造2025规划的持续推进,单ARM处理器越来越难胜任工业现场的功能要求,特别是如今能源电力、工业控制、智慧医疗等行业,往往更需要ARM + FPGA架构的处理器平台来实现例如多路/高速AD采集、多路网口、多路串口、多路/高速并行DI/DO、高速数据并行处理等特定功能,因此ARM + FPGA架构处理器平台愈发受市场欢迎。
创龙科技SOM-TLT3F是一款基于全志科技T3四核ARM Cortex-A7处理器 + 紫光同创Logos PGL25G/PGL50G FPGA设计的异构多核全国产工业核心板,ARM Cortex-A7处理单元主频高达 1.2GHz。核心板ARM、FPGA、ROM、RAM、电源、晶振、连接器等所有元器件均采用国产工业级方案,国产化率100%。
全志T3为准车规级芯片,四核ARM Cortex-A7架构,主频高达1.2GHz,支持双路网口、八路UART、SATA大容量存储接口,同时支持4路显示、GPU以及1080P H.264视频硬件编解码。另外,创龙科技已在T3平台适配国产嵌入式系统翼辉SylixOS,真正实现软硬件国产化。
国产ARM + FPGA的CSI通信案例介绍
本章节主要介绍全志科技T3与紫光同创Logos基于CSI的ARM + FPGA通信方案,使用的硬件平台为:创龙科技TLT3F-EVM工业评估板。
该案例实现T3(ARM Cortex-A7)与FPGA的CSI通信功能。案例使用的CSI0总线,最高支持分辨率为1080P@30fps,数据位宽为8bit,如下图所示。CSI0理论传输带宽为:1920 x 1080 x 8bit x 30fps ≈ 59MB/s。
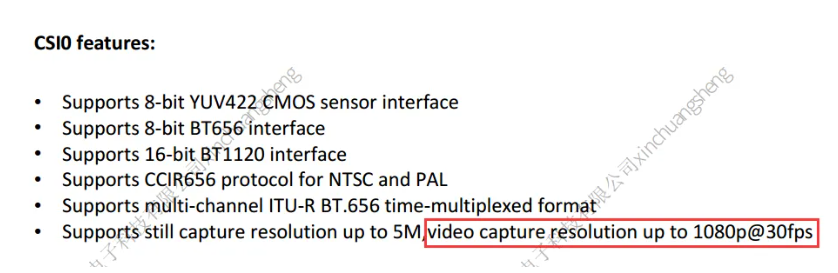
功能框图与程序流程图,如下图所示。
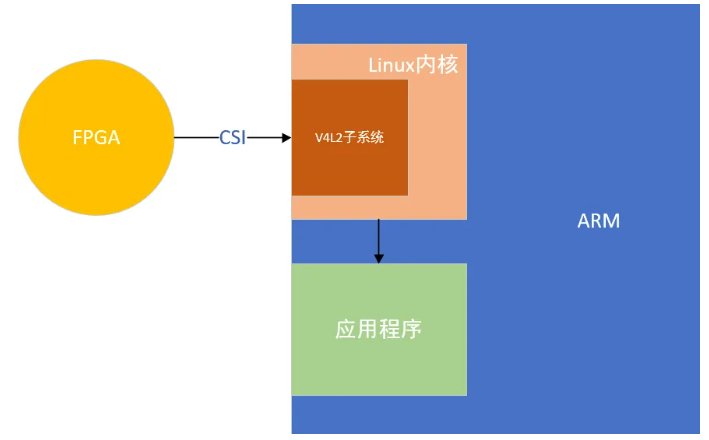
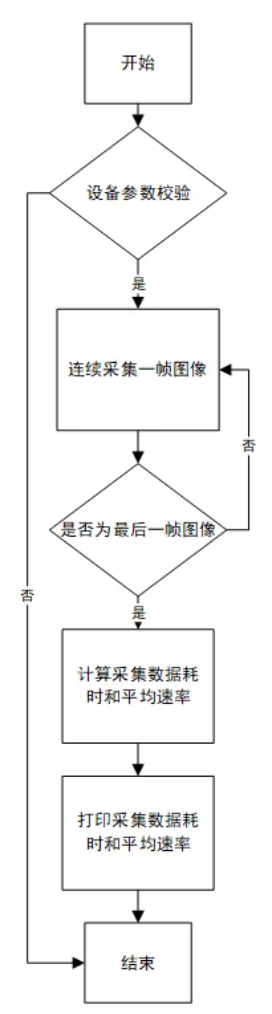
ARM端案例csi_test案例说明
ARM端案例csi_test主要功能如下:
(1)基于Linux子系统V4L2;
(2)通过CSI总线,采集指定帧数数据;
(3)计算总耗时;
(4)打印平均采集速率,并校验最后一帧图像的数据。FPGA端案例parallel_csi_tx案例说明
FPGA端案例parallel_csi_tx主要功能如下:
(1)将测试数据(0x00~0xFF)写入FIFO;
(2)从FIFO读出数据,按行与帧的方式、1024x512的分辨率,通过CSI总线发送至ARM端。
案例测试演示
FPGA程序将CSI_PCLK设置为65MHz,测试数据写入FIFO的时钟FIFO_WR_CLK设置为59MHz。由于FPGA端需将数据写入FIFO再从FIFO读出后发送,每一行与每一帧之间的间隔时间会受FIFO写入的速率影响,因此CSI通信的实际理论传输带宽应为:(59MHz x 8bit / 8)MB/s = 59MB/s。从上图可知,本次实测传输速率约为52.4MB/s,误码率为0,接近理论通信速率。
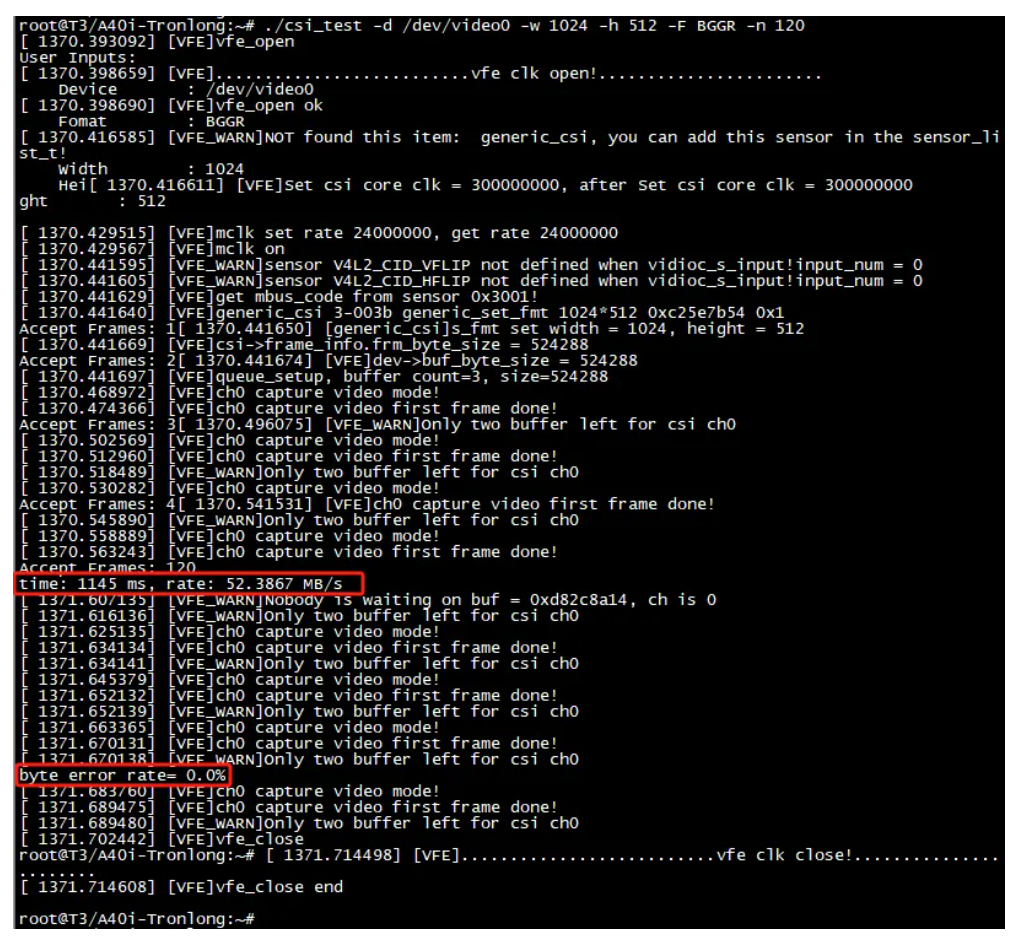
-
回复: TinaLinux 无法创建 swap 分区吗?发布在 V Series
可以的,
【FAQ】全志V853芯片 swap功能简介与tina上swap分区使用方法
https://bbs.aw-ol.com/topic/1626/share/1
-
回复: 搭建开发环境,出现问了了,总是报fatal: cannot obtain manifest https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git发布在 V Series
@aaa0557li 在 搭建开发环境,出现问了了,总是报fatal: cannot obtain manifest https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git 中说:
git config --global user.email "you@example.com"
git config --global user.name "Your Name"
-
【R128】基础组件开发指南——SPI LCD 显示驱动发布在 A Series
SPI LCD 显示驱动
简介
R128 平台提供了 SPI DBI 的 SPI TFT 接口,具有如下特点:
- Supports DBI Type C 3 Line/4 Line Interface Mode
- Supports 2 Data Lane Interface Mode
- Supports data source from CPU or DMA
- Supports RGB111/444/565/666/888 video format
- Maximum resolution of RGB666 240 x 320@30Hz with single data lane
- Maximum resolution of RGB888 240 x 320@60Hz or 320 x 480@30Hz with dual data lane
- Supports tearing effect
- Supports software flexible control video frame rate
同时,提供了SPILCD驱动框架以供 SPI 屏幕使用。
模块驱动
menuconfig配置说明
SPILCD 模块 menuconfig 的配置如下(以选择kld2844b屏为例):
Drivers Options ---> soc related device drivers ---> SPILCD Devices ---> [*] DISP Driver Support(spi_lcd) [*] spilcd hal APIs test //spilcd模块测试用例 LCD_FB panels select ---> //spilcd屏驱动配置 [*] LCD support kld2844B panel [ ] LCD support kld35512 panel Board select ---> [ ] board kld2844b support //板级显示使用显示驱动私有方式的配置项,而使用sys_config.fex方式不用配置另外可能需依赖的配置项有:
- DRIVERS_SPI
- DRIVERS_DBI
- DRIVERS_PWM
源码结构介绍
源码结构及主要驱动文件如下:
spilcd/ ├── lcd_fb/ │ ├── dev_lcd_fb.c # spilcd driver 层 │ ├── disp_display.c │ ├── disp_lcd.c │ ├── lcd_fb_intf.c │ └── panels/ # lcd驱动相关 │ ├── kld2844b.c │ ├── lcd_source.c │ ├── panels.c │ └── panels.h └── soc/ ├── disp_board_config.c # 板级配置解析 └── kld2844b_config.c # 显示私有方式的板级配置文件模块参数配置
当前板级显示支持两种配置方法,一是使用
sys_config.fex的方式进行配置,二是在不支持sys_config.fex情况下,可以通过显示驱动私有的方式进行配置。下面分别对两种方式进行说明。使用 sys_config.fex 的方式进行配置
FreeRTOS系统路径:
board/芯片名/方案名/configs/sys_config.fex配置文件具体要看芯片方案所实际使用的,也可能使用的配置文件名称为sys_config_xxx.fex(xx是存储方案的标识,例如sys_config_nor.cfg、sys_config_nand.cfg)
具体配置举例如下:
;---------------------------------------------------------------------------------- ;lcd_fb0 configuration ;---------------------------------------------------------------------------------- [lcd_fb0] lcd_used = 1 ; 使用显示屏 lcd_model_name = "spilcd" ; 模型:spilcd lcd_driver_name = "jlt35031c" ; 屏幕驱动:jlt35031c lcd_x = 320 ; 屏幕宽分辨率 lcd_y = 480 ; 屏幕高分辨率 lcd_width = 49 ; 屏幕物理宽度 lcd_height = 74 ; 屏幕物理高度 lcd_data_speed = 60 ; SPI 驱动频率 60MHz lcd_pwm_used = 1 ; lcd使用pwm背光 lcd_pwm_ch = 1 ; lcd使用pwm背光通道1 lcd_pwm_freq = 5000 ; lcd使用pwm背光频率5000Hz lcd_pwm_pol = 0 ; lcd使用pwm背光相位0 lcd_if = 0 ; lcd使用spi接口,0-spi, 1-dbi lcd_pixel_fmt = 11 lcd_dbi_fmt = 2 lcd_dbi_clk_mode = 1 lcd_dbi_te = 1 fb_buffer_num = 2 lcd_dbi_if = 4 lcd_rgb_order = 0 lcd_fps = 60 lcd_spi_bus_num = 1 lcd_frm = 2 lcd_gamma_en = 1 lcd_backlight = 100 lcd_power_num = 0 lcd_gpio_regu_num = 0 lcd_bl_percent_num = 0 lcd_spi_dc_pin = port:PA19<1><0><3><0> ; DC脚 ;RESET Pin lcd_gpio_0 = port:PA20<1><0><2><0> ; 复位脚lcd_driver_name
Lcd屏驱动的名字(字符串),必须与屏驱动中
strcut __lcd_panel变量的name成员一致。lcd_model_name
Lcd屏模型名字,非必须,可以用于同个屏驱动中进一步区分不同屏。
lcd_if
Lcd Interface
设置相应值的对应含义为:
0:spi接口 1:dbi接口spi接口就是俗称的4线模式,这是因为发送数据时需要额外借助DC线来区分命令和数据,与sclk,cs和sda共四线。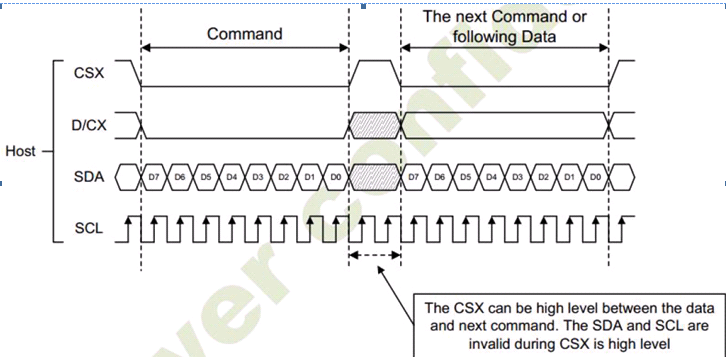
如果设置了
dbi接口,那么还需要进一步区分dbi接口,需要设置lcd_dbi_iflcd_dbi_if
Lcd dbi 接口设置。
这个参数只有在
lcd_if=1时才有效。设置相应值的对应含义为:
0:L3I1 1:L3I2 2:L4I1 3:L4I2 4:D2LI所有模式在发送数据时每个周期的比特数量根据不同像素格式不同而不同。
L3I1和L3I2是三线模式(不需要DC脚),区别是读时序,也就是是否需要额外脚来读寄存器。读写时序图如下: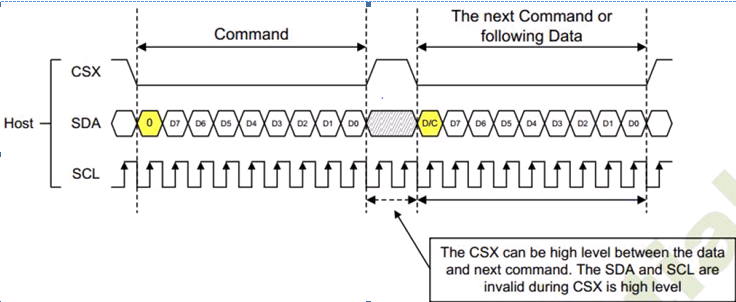
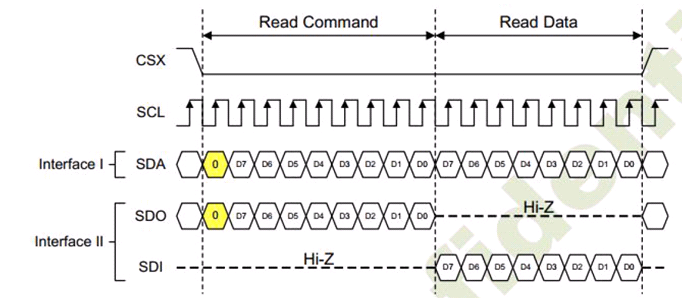
L4I1和L4I2是四线模式,与spi接口协议一样,区别是DC脚的控制是否自动化控制,另外I2和I1的区别是读时序,也就是否需要额外脚来读取寄存器。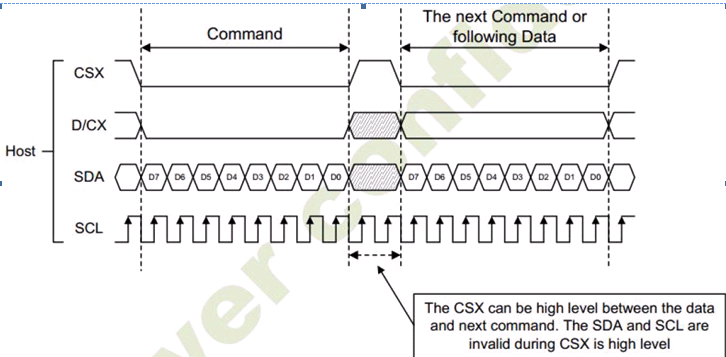
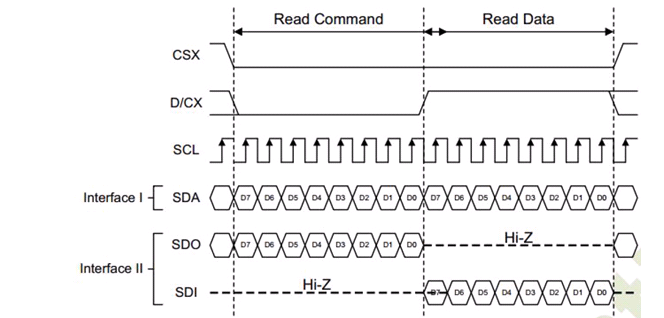
D2LI是两data lane模式。发送命令部分时序与读时序与L3I1一致,下图是发送数据时的时序,不同像素格式时钟周期数量不一样。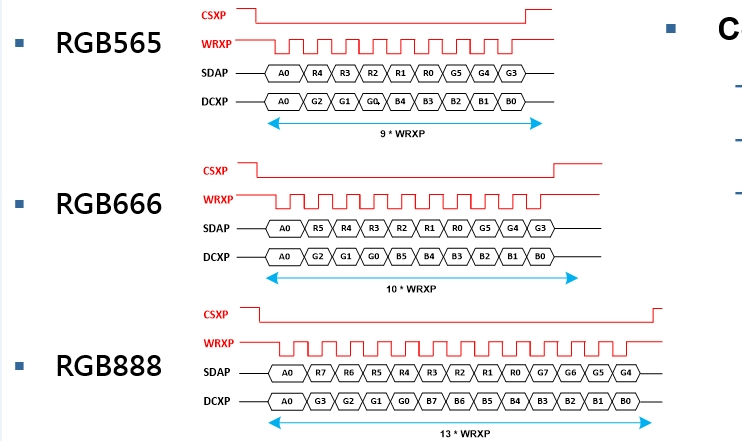
lcd_dbi_fmt
DBI接口像素格式。0:RGB111 1:RGB444 2:RGB565 3:RGB666 4:RGB888选择的依据是接收端屏
Driver IC的支持情况,请查看Driver IC手册或询问屏厂。然后必须配合
lcd_pixel_fmt的选择,比如说选RGB565时,lcd_pixel_fmt也要选565格式。lcd_dbi_te
使能te触发。
te即(Tearing effect),也就是撕裂的意思,由于读写不同导致撕裂现象,te脚的功能就是用于同步读写,te脚的频率也就是屏的刷新率,所以te脚也可以看做vsync脚(垂直同步脚)
0: 禁止te 1: 下降沿触发 2: 上升沿触发查看带te脚的屏进一步说明。
lcd_dbi_clk_mode
选择dbi时钟的行为模式。
0:自动停止。有数据就有时钟,没发数据就没有 1:一直保持。无论发不发数据都有时钟注意上面的选项关系屏兼容性。
lcd_rgb_order
输入图像数据rgb顺序识别设置,仅当lcd_if=1时有效。
0:RGB 1:RBG 2:GRB 3:GBR 4:BRG 5:BGR 6:G_1RBG_0 7:G_0RBG_1 8:G_1BRG_0 9:G_0BRG_1非RGB565格式用0到5即可。
针对rgb565格式说明如下:
rgb565格式会遇到大小端问题,arm平台和PC平台存储都是小端(little endian,低字节放在低地址,高字节放在高地址),但是许多spi屏都是默认大端(Big Endian)。
也就是存储的字节顺序和发送的字节顺序不对应。
这个时候选择6以下,DBI接口就会自动将小端转成大端。
如果遇到默认是小端的spi屏,则需要选择6以上,DBI接口会自动用回小端方式。
6以上格式这样解释:
R是5比特,G是6比特,B是5比特,再把G拆成高3位(G_1)和低3位(G_0)
所以以下两种顺序:
- R-G_1-G_0-B,大端。
- G_0-B-R-G_1,对应上面的9,小端。
lcd_x
显示屏的水平像素数量,注意如果屏支持横竖旋转,那么lcd_x和lcd_y也要对调。
lcd_y
显示屏的行数,注意如果屏支持横竖旋转,那么lcd_x和lcd_y也要对调。
lcd_data_speed
用于设置spi/dbi接口时钟的速率,单位MHz。
- 发送端(SOC)的最大限制是100MHz。
- 接收端(屏Driver IC)的限制,请查看对应Driver IC手册或者询问屏厂支持。
- 超出以上限制都有可能导致显示异常。
lcd_fps
设置屏的刷新率,单位Hz。当lcd_dbi_te使能时,这个值设置无效。
lcd_pwm_used
是否使用pwm。
此参数标识是否使用pwm用以背光亮度的控制。
lcd_pwm_ch
Pwm channel used
此参数标识使用的Pwm通道。
lcd_pwm_freq
Lcd backlight PWM Frequency
这个参数配置PWM信号的频率,单位为Hz。
lcd_pwm_pol
Lcd backlight PWM Polarity
这个参数配置PWM信号的占空比的极性。设置相应值对应含义为:
0:active high 1:active lowlcd_pwm_max_limit
Lcd backlight PWM
最高限制,以亮度值表示。
比如150,则表示背光最高只能调到150,0~255范围内的亮度值将会被线性映射到0~150范围内。用于控制最高背光亮度,节省功耗。
lcd_backlight
默认背光值,取值范围0到255,值越大越亮。
lcd_bl_en
背光使能脚定义
lcd_spi_dc_pin
指定作为DC的管脚,用于spi接口时。
lcd_gpio_x
x表示数字。如果有多个gpio脚需要控制,则定义lcd_gpio_0,lcd_gpio_1等。
lcd_spi_bus_num
选择spi总线id,只有spi1支持DBI协议,所以这里一般选择1。
取值范围:0到1。
lcd_pixel_fmt
选择传输数据的像素格式。
可选值如下,当你更换RGB分量顺序的时候,也得相应修改lcd_rgb_order,或者修改屏驱动的rgb分量顺序(一般是3Ah寄存器)。
DBI接口只支持RGB32和RGB16的情况。
SPI接口只支持RGB16的情况。
enum lcdfb_pixel_format { LCDFB_FORMAT_ARGB_8888 = 0x00, // MSB A-R-G-B LSB LCDFB_FORMAT_ABGR_8888 = 0x01, LCDFB_FORMAT_RGBA_8888 = 0x02, LCDFB_FORMAT_BGRA_8888 = 0x03, LCDFB_FORMAT_XRGB_8888 = 0x04, LCDFB_FORMAT_XBGR_8888 = 0x05, LCDFB_FORMAT_RGBX_8888 = 0x06, LCDFB_FORMAT_BGRX_8888 = 0x07, LCDFB_FORMAT_RGB_888 = 0x08, LCDFB_FORMAT_BGR_888 = 0x09, LCDFB_FORMAT_RGB_565 = 0x0a, LCDFB_FORMAT_BGR_565 = 0x0b, LCDFB_FORMAT_ARGB_4444 = 0x0c, LCDFB_FORMAT_ABGR_4444 = 0x0d, LCDFB_FORMAT_RGBA_4444 = 0x0e, LCDFB_FORMAT_BGRA_4444 = 0x0f, LCDFB_FORMAT_ARGB_1555 = 0x10, LCDFB_FORMAT_ABGR_1555 = 0x11, LCDFB_FORMAT_RGBA_5551 = 0x12, LCDFB_FORMAT_BGRA_5551 = 0x13, };fb_buffer_num
显示framebuffer数量,为了平滑显示,这里一般是2个,为了省内存也可以改成1。
模块 sys_config.fex 配置案例
典型2 data lane配置
一些屏支持双数据线传输以加快数据传输速度,此时需要走DBI协议,典型配置如下:
[lcd_fb0] lcd_used = 1 lcd_driver_name = "kld2844b" lcd_if = 1 lcd_dbi_if = 4 lcd_data_speed = 60 lcd_spi_bus_num = 1 lcd_x = 320 lcd_y = 240 lcd_pwm_used = 1 lcd_pwm_ch = 4 lcd_pwm_freq = 5000 lcd_pwm_pol = 0 lcd_pixel_fmt = 0 lcd_dbi_fmt = 3 lcd_rgb_order = 0 fb_buffer_num = 2 lcd_backlight = 200 lcd_fps = 60 lcd_dbi_te = 0 lcd_bl_en = port:PB04<1><0><default><1> lcd_gpio_0 = port:PB02<1><0><default><1>- 硬件连接上,第二根数据脚连接到原来1 data lane的DC脚,可以这样理解:2数据线在传输数据时就自带D/C(Data/Commend)信息了,所以原来的DC脚就可以空出来作为第二根数据线了。
- 屏驱动上,需要使能2 data lane模式,具体寄存器查看对应driverIC手册或者询问屏厂。
- 这里的针对对2 data lane的关键参数是lcd_if,lcd_dbi_if,lcd_dbi_fmt和lcd_spi_bus_num。
- lcd_x和lcd_y是屏分辨率。如果屏支持旋转(横竖旋转),这里也需要对调。
- lcd_pwm开头,lcd_backlight和lcd_bl_en的是背光相关设置,如果有相关硬件连接的话。
- lcd_pixel_fmt和fb_buffer_num是显示framebuffer的设置。
- lcd_gpio_开头的是自定义gpio的设置(比如复位脚)。
- lcd_fps和lcd_dbi_te是刷新方式相关的设置。
原SPI接口屏配置
如果IC支持DBI接口,那么就没有必要用SPI接口,DBI接口其协议能覆盖所有情况。
一些IC不支持DBI,那么只能用spi接口(通过设置lcd_if),如果使用spi接口,它有一些限制。
- 不支持2 data lane。
- 必须指定DC脚。这是由于spi协议不会自动控制DC脚来区分数据命令,通过设置lcd_spi_dc_pin可以完成这个目的,这跟管脚不必用spi里面的脚。
- 只支持rgb565的像素格式。由于只有单data lane,速度过慢,rgb565以上格式都不现实。
[lcd_fb0] lcd_used = 1 lcd_driver_name = "kld2844b" lcd_if = 0 lcd_data_speed = 60 lcd_spi_bus_num = 1 lcd_x = 320 lcd_y = 240 lcd_pwm_used = 1 lcd_pwm_ch = 4 lcd_pwm_freq = 5000 lcd_pwm_pol = 0 lcd_pixel_fmt = 10 lcd_rgb_order = 0 fb_buffer_num = 2 lcd_backlight = 200 lcd_fps = 60 lcd_dbi_te = 0 lcd_bl_en = port:PB04<1><0><default><1> lcd_gpio_0 = port:PB02<1><0><default><1> lcd_spi_dc_pin = port:PA19<1><0><3><1>带te脚的屏
te即(Tearing effect),也就是撕裂的意思,是由于读写不同步导致撕裂现象,te脚的功能就是用于同步读写,te脚的频率也就是屏的刷新率,所以te脚也可以看做vsync脚(垂直同步脚)。
- 硬件设计阶段,需要将屏的te脚连接到IC的DBI接口的te脚。
- 配置上接口使用dbi接口。
- 然后使能lcd_dbi_te。
- 屏驱动使能te功能,寄存器一般是35h,详情看屏对应的driver IC手册。
- 屏驱动设置帧率,根据屏能接受的传输速度选择合理的帧率(比如ST7789H2里面是通过c6h来设置te频率)。
[lcd_fb0] lcd_used = 1 lcd_driver_name = "kld2844b" lcd_if = 1 lcd_dbi_if = 4 lcd_data_speed = 60 lcd_spi_bus_num = 1 lcd_x = 320 lcd_y = 240 lcd_pwm_used = 1 lcd_pwm_ch = 4 lcd_pwm_freq = 5000 lcd_pwm_pol = 0 lcd_pixel_fmt = 0 lcd_dbi_fmt = 3 lcd_rgb_order = 0 fb_buffer_num = 2 lcd_backlight = 200 lcd_fps = 60 lcd_dbi_te = 1 lcd_bl_en = port:PB04<1><0><default><1> lcd_gpio_0 = port:PB02<1><0><default><1>横竖屏旋转
- 平台没有硬件旋转功能,软件旋转太慢而且耗费CPU。
- 不少spi屏支持内部旋转,需要在屏驱动初始化的时候进行设置,一般是36h寄存器。
// 转成横屏 sunxi_lcd_cmd_write(sel, 0x36); sunxi_lcd_para_write(sel, 0xa0);帧率控制
屏的刷新率受限于多方面:
- SPI/DBI硬件传输速度,也就是时钟脚的频率。设置lcd_data_speed可以设置硬件传输速度,最大不超过100MHz。如果屏能正常接收,这个值自然是越大越好。
- 屏driver IC接收能力。Driver IC手册中会提到屏的能接受的最大sclk周期。
- 使用2 data lane还是1 data lane,理论上2 data lane的速度会翻倍。见典型2 data lane配置。
- 像素格式。像素格式决定需要传输的数据量,颜色数量越小的像素格式,帧率越高,但是效果越差。
- 带te脚的屏一节中我们知道,te相关设置直接影响到屏刷新率。
- 如果不支持te,可以通过设置lcd_fps来控制帧率,你需要根据第一点和第二点选择一个合适的值。
背光控制
- 硬件需要支持pwm背光电路。
- 驱动支持pwm背光调节,只需要配置好lcd_pwm开头,lcd_backlight和lcd_bl_en等背光相关配置即可。
像素格式相关
- lcd_pixel_fmt,这个设置项用于设置fbdev的像素格式。
- lcd_dbi_fmt,这个用于设置DBI接口发送的像素格式。
SPI/DBI发送数据的时候没有必要发送alpha通道,但是应用层却有对应的alpha通道,比如ARGB8888格式。
这个时候硬件会自动帮我们处理好alpha通道,所以lcd_pixel_fmt选择有alpha通道的格式时,lcd_dbi_fmt可以选rgb666或者rgb888,不用和它一样。
电源配置
有多个电源的话,就用lcd_power1,lcd_power2......然后屏驱动里面调用sunxi_lcd_power_enable接口即可。
GPIO配置说明
lcd_bl_en、lcd_spi_dc_pin以及lcd_gpio_x都是属于GPIO属性类型。
下面以lcd_spi_dc_pin为例,具体说明GPIO属性的参数值含义:
lcd_spi_dc_pin = port:PA19<1><0><3><1>引脚说明:port: 端口 < 复用功能 >< 上下拉 >< 驱动能力 >< 输出值 >
等式右边的从左到右5个字段代表的具体含义如下:
PA19:端口,表示GPIO管脚。PA表示PA组管脚,19表示第19根管脚;即PA19管脚。<1>:复用功能,表示GPIO复用类型。1表示将PA19选择为通用GPIO功能,0为输入,1为输出。<0>:上下拉,表示内置电阻。使用0的话,表示内部电阻高阻态,如果是1则是内部电阻上拉,2就代表内部电阻下拉。其它数据无效。<3>:表示驱动能力。1是默认等级,数字越大驱动能力越强,最大是3。<1>:表示默认输出电平值。0为低电平,1为高电平。
多个显示
- 确定硬件有没有多余的spi/dbi接口。
- 需要在sys_config.fex里面新增lcd_fb1,配置方式与lcd_fb0一样(或者在显示私有方式的板级配置文件里面新增
g_lcd1_config,配置方式与g_lcd0_config一样),其中lcd_spi_bus_num不能一样。
依赖驱动配置
spilcd模块依赖spi,dbi,pwm等驱动。
使用显示私有方式进行配置
路径:
rtos-hal/hal/source/spilcd/soc/具体板级显示配置文件可参考该路径下的
kld2844b_config.c配置文件。该文件模仿
sys_config.fex来配置一些板级相关的资源,源文件中需要定义4个全局变量:g_lcd0_config、g_lcd1_config、g_lcd0_config_len和g_lcd1_config_len,且变量名字固定,不能修改。具体说明如下:
g_lcd0_config:第一个屏的配置变量,struct property_t数据类型。g_lcd1_config:第二个屏的配置变量,struct property_t数据类型。g_lcd0_config_len和g_lcd1_config_len是对应上面两个数组变量的长度,照搬即可。
struct property_t数据类型,用于定义一个属性的信息:- 属性名字。对应其成员
name,字符串。 - 属性类型。对应其成员
type,看enum proerty_type的定义,共有整型,字符串,GPIO,专用pin和电源。 - 属性值。根据上面的属性类型来选择
union中成员来赋值。
对于上述常用的属性类型举例如下:
整型:
{ .name = "lcd_used", .type = PROPERTY_INTGER, .v.value = 1, },字符串:
{ .name = "lcd_driver_name", .type = PROPERTY_STRING, .v.str = "kld2844b", },GPIO:
{ .name = "lcd_spi_dc_pin", .type = PROPERTY_GPIO, .v.gpio_list = { .gpio = GPIOA(19), .mul_sel = GPIO_DIRECTION_OUTPUT, .pull = 0, .drv_level = 3, .data = 1, }, },g_lcd0_config的含义与前述的使用sys_config.fex方式中的lcd_fb0一致。
编写屏驱动
屏驱动源码位置:
rtos-hal/hal/source/spilcd/lcd_fb/panels-
在屏驱动源码位置下拷贝现有一个屏驱动,包括头文件和源文件,然后将文件名改成有意义的名字,比如屏型号。
-
修改源文件中的
strcut __lcd_panel变量的名字,以及这个变量成员name的名字,这个名字必须和sys_config.fex中[lcd_fb0](或板级配置文件中g_lcd0_config)的lcd_driver_name一致。 -
在屏驱动目录下修改
panel.c和panel.h。在全局结构体变量panel_array中新增刚才添加strcut __lcd_panel的变量指针。panel.h中新增strcut __lcd_panel的声明。并用宏括起来。 -
修改
rtos-hal/hal/source/spilcd/lcd_fb/panels/Kconfig,新增一个config,与第三点提到的宏对应。 -
修改
rtos-hal/hal/source/spilcd/lcd_fb/路径下的Makefile文件。给lcd_fb-obj变量新增刚才加入的源文件对应.o。 -
根据本手册以及屏手册,Driver IC手册修改sys_config.fex中的[lcd_fb0]节点(或显示私有方式的板级配置文件中的
g_lcd0_config配置变量)下面的属性 -
实现屏源文件中的
LCD_open_flow,LCD_close_flow,LCD_panel_init,LCD_power_on等函数
开关屏流程函数解析
开关屏的操作流程如下图所示。
其中,LCD_open_flow和LCD_close_flow称为开关屏流程函数,该函数利用LCD_OPEN_FUNC进行注册回调函数,先注册先执行,可以注册多个,不限制数量。
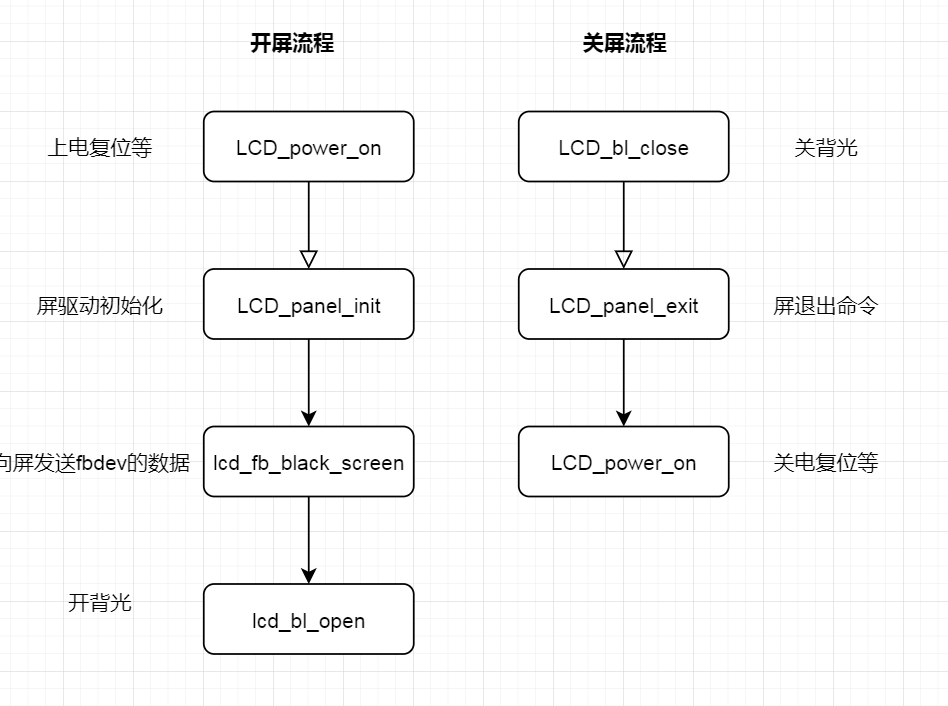
LCD_open_flow
功能:初始化开屏的步骤流程。
原型:
static __s32 LCD_open_flow(__u32 sel)函数常用内容为:
static __s32 LCD_open_flow(__u32 sel) { LCD_OPEN_FUNC(sel, LCD_power_on,10); LCD_OPEN_FUNC(sel, LCD_panel_init, 50); LCD_OPEN_FUNC(sel, lcd_fb_black_screen, 100); LCD_OPEN_FUNC(sel, LCD_bl_open, 0); return 0; }如上,初始化整个开屏的流程步骤为四个:
- 打开LCD电源,再延迟10ms。
- 初始化屏,再延迟50ms;(不需要初始化的屏,可省掉此步骤)。
- 向屏发送全黑的数据。这一步骤是必须的,而且需要在开背光之前。
- 打开背光,再延迟0ms。
LCD_open_flow函数只会系统初始化的时候调用一次,执行每个LCD_OPEN_FUNC即是把对应的开屏步骤函数进行注册,并没有立即执行该开屏步骤函数。LCD_open_flow函数的内容必须统一用LCD_OPEN_FUNC(sel, function, delay_time)进行函数注册的形式,确保正常注册到开屏步骤中。LCD_OPEN_FUNC的第二个参数是前后两个步骤的延时长度,单位ms,注意这里的数值请按照屏手册规定去填,乱填可能导致屏初始化异常或者开关屏时间过长,影响用户体验。
LCD_close_flow
功能:初始化关屏的步骤流程。
原型:
static __s32 LCD_close_flow(__u32 sel)函数常用内容为:
static __s32 LCD_close_flow(__u32 sel) { LCD_CLOSE_FUNC(sel, LCD_bl_close, 50); LCD_CLOSE_FUNC(sel, LCD_panel_exit, 10); LCD_CLOSE_FUNC(sel, LCD_power_off, 10); return 0; }- LCD_bl_close,是关背光,关完背光在处理其它事情,不会影响用户视觉。
- LCD_panel_exit,发送命令让屏退出工作状态。
- 关电复位,让屏彻底关闭。
LCD_OPEN_FUNC
功能:注册开屏步骤函数到开屏流程中,记住这里是注册不是执行!
原型:
void LCD_OPEN_FUNC(__u32 sel, LCD_FUNC func, __u32 delay)参数说明:
func是一个函数指针,其类型是:
void (*LCD_FUNC) (__u32 sel),用户自己定义的函数必须也要用统一的形式。比如:void user_defined_func(__u32 sel) { //do something }delay是执行该步骤后,再延迟的时间,时间单位是毫秒。
LCD_power_on
这是开屏流程中第一步,一般在这个函数使用sunxi_lcd_gpio_set_value进行GPIO控制,用sunxi_lcd_power_enable函数进行电源开关。
参考屏手册里面的上电时序(Power on sequence)。
LCD_panel_init
这是开屏流程第二步,一般使用sunxi_lcd_cmd_write和sunxi_lcd_para_write对屏寄存器进行初始化。
请向屏厂索要初始化寄存器代码或者自行研究屏Driver IC手册。
lcd_fb_black_screen
向屏传输全黑数据的接口,是必须的,否则打开背光后,呈现的将是雪花屏。
LCD_bl_open
这是背光使能,固定调用。
- sunxi_lcd_backlight_enable, 打开lcd_bl_en脚。
- sunxi_lcd_pwm_enable, 使能pwm。
LCD_bl_close
这是关闭背光。固定调用下面两个函数,分别是:
- sunxi_lcd_backlight_disable,lcd_bl_en关闭
- sunxi_lcd_pwm_disable, 关闭pwm。
LCD_power_off
这是关屏流程中最后一步,一般在这个函数使用sunxi_lcd_gpio_set_value进行GPIO控制,用sunxi_lcd_power_enable函数进行电源开关。
参考屏手册里面的下电时序(Power off sequence)。
sunxi_lcd_delay_ms
函数:sunxi_lcd_delay_ms/sunxi_lcd_delay_us
功能:延时函数,分别是毫秒级别/微秒级别的延时。
原型:
s32 sunxi_lcd_delay_ms(u32 ms); / s32 sunxi_lcd_delay_us(u32 us);sunxi_lcd_backlight_enable
函数:sunxi_lcd_backlight_enable/ sunxi_lcd_backlight_disable
功能:打开/关闭背光,操作的是lcd_bl_en。
原型:
-
void sunxi_lcd_backlight_enable(u32 screen_id); -
void sunxi_lcd_backlight_disable(u32 screen_id);
sunxi_lcd_pwm_enable
函数:sunxi_lcd_pwm_enable / sunxi_lcd_pwm_disable
功能:打开/关闭pwm控制器,打开时pwm将往外输出pwm波形。对应的是lcd_pwm_ch所对应的那一路pwm。
原型:
-
s32 sunxi_lcd_pwm_enable(u32 screen_id); -
s32 sunxi_lcd_pwm_disable(u32 screen_id);
sunxi_lcd_power_enable
函数:sunxi_lcd_power_enable / sunxi_lcd_power_disable
功能:打开/关闭Lcd电源,操作的是板级配置文件中的
lcd_power/lcd_power1/lcd_power2。(pwr_id标识电源索引)。原型:
-
void sunxi_lcd_power_enable(u32 screen_id, u32 pwr_id); -
void sunxi_lcd_power_disable(u32 screen_id, u32 pwr_id);
- pwr_id = 0:对应于配置文件中的lcd_power。
- pwr_id = 1:对应于配置文件中的lcd_power1。
- pwr_id = 2:对应于配置文件中的lcd_power2。
- pwr_id = 3:对应于配置文件中的lcd_power3。
sunxi_lcd_cmd_write
函数:sunxi_lcd_cmd_write
功能:使用spi/dbi发送命令。
原型:
s32 sunxi_lcd_cmd_write(u32 screen_id, u8 cmd);sunxi_lcd_para_write
函数:sunxi_lcd_para_write
功能:使用spi/dbi发送参数。
原型:
s32 sunxi_lcd_para_write(u32 screen_id, u8 para);sunxi_lcd_gpio_set_value
函数:sunxi_lcd_gpio_set_value
功能:LCD_GPIO PIN脚上输出高电平或低电平。
原型:
s32 sunxi_lcd_gpio_set_value(u32 screen_id, u32 io_index, u32 value);参数说明:
- io_index = 0:对应于配置文件中的lcd_gpio_0。
- io_index = 1:对应于配置文件中的lcd_gpio_1。
- io_index = 2:对应于配置文件中的lcd_gpio_2。
- io_index = 3:对应于配置文件中的lcd_gpio_3。
- value = 0:对应IO输出低电平。
- Value = 1:对应IO输出高电平。
只用于该GPIO定义为输出的情形。
sunxi_lcd_gpio_set_direction
函数:sunxi_lcd_gpio_set_direction
功能:设置LCD_GPIO PIN脚为输入或输出模式。
原型:
s32 sunxi_lcd_gpio_set_direction(u32 screen_id, u32 io_index, u32 direction);参数说明:
- io_index = 0:对应于配置文件中的lcd_gpio_0。
- io_index = 1:对应于配置文件中的lcd_gpio_1。
- io_index = 2:对应于配置文件中的lcd_gpio_2。
- io_index = 3:对应于配置文件中的lcd_gpio_3。
- direction = 0:对应IO设置为输入。
- direction = 1:对应IO设置为输出。
模块测试用例
#include <stdio.h> #include <stdlib.h> #include <stdint.h> #include <string.h> #include <unistd.h> #include <hal_cache.h> #include <hal_mem.h> #include <hal_log.h> #include <hal_cmd.h> #include <hal_lcd_fb.h> static uint32_t width; static uint32_t height; static long int screensize = 0; static char *fbsmem_start = 0; static void lcdfb_fb_init(uint32_t yoffset, struct fb_info *p_info) { p_info->screen_base = fbsmem_start; p_info->var.xres = width; p_info->var.yres = height; p_info->var.xoffset = 0; p_info->var.yoffset = yoffset; } int show_rgb(unsigned int sel) { int i = 0, ret = -1; struct fb_info fb_info; int bpp = 4; unsigned char color[4] = {0xff,0x0,0xff,0x0}; width = bsp_disp_get_screen_width(sel); height = bsp_disp_get_screen_height(sel); screensize = width * bpp * height; fbsmem_start = hal_malloc_coherent(screensize); hal_log_info("width = %d, height = %d, screensize = %d, fbsmem_start = %x\n", width, height, screensize, fbsmem_start); memset(fbsmem_start, 0, screensize); for (i = 0; i < screensize / bpp; ++i) { memcpy(fbsmem_start+i*bpp, color, bpp); } memset(&fb_info, 0, sizeof(struct fb_info)); lcdfb_fb_init(0, &fb_info); hal_dcache_clean((unsigned long)fbsmem_start, screensize); bsp_disp_lcd_set_layer(sel, &fb_info); hal_free_coherent(fbsmem_start); return ret; } static int cmd_test_spilcd(int argc, char **argv) { uint8_t ret; hal_log_info("Run spilcd hal layer test case\n"); ret = show_rgb(0); hal_log_info("spilcd test finish\n"); return ret; } FINSH_FUNCTION_EXPORT_CMD(cmd_test_spilcd, test_spilcd, spilcd hal APIs tests)测试命令:
test_spilcd测试结果:
1.如果LCD是ARGB8888像素格式输入,执行命令后会显示一帧紫色画面。 2.如果LCD是RGB565像素格式输入,执行命令后会显示一帧蓝色画面(SPI 协议是黄色画面(没有RB Swap))FAQ
怎么判断屏初始化成功
屏初始化成功,一般呈现的现象是雪花屏。因为屏驱动里面,在
LCD_open_flow中添加了lcd_fb_black_screen的注册,故正常情况下开机是有背光的黑屏画面。黑屏-无背光
一般是电源或者pwm相关配置没有配置好。参考lcd_pwm开头的相关配置。
送图无显示
排除步骤:
- 首先执行spilcd模块测试命令
test_spilcd,如果能正常显示颜色画面,说明显示通路正常,只是应用未能正确配置送图接口。如果执行测试用例无法正常显示颜色画面,接着下面步骤。 - 屏驱动里面,在
LCD_open_flow中删除lcd_fb_black_screen的注册,启动后,如果屏初始化成功应该是花屏状态(大部分屏如此)。 - 如果屏没有初始化成功,请检查屏电源,复位脚状态。
- 如果屏初始化成功,但是发数据时又没法显示,那么需要检查是不是帧率过快,查看帧率控制。
- 如果电源复位脚正常,请检查配置,lcd_dbi_if, lcd_dbi_fmt是否正确,屏是否支持, 如果支持,在屏驱动里面是否有对应上。
- 尝试修改lcd_dbi_clk_mode。
闪屏
非常有可能是速度跑太快,参考帧率控制一小节。
画面偏移
画面随着数据的发送偏移越来越大。
尝试修改lcd_dbi_clk_mode。
屏幕白屏
屏幕白屏,但是背光亮起
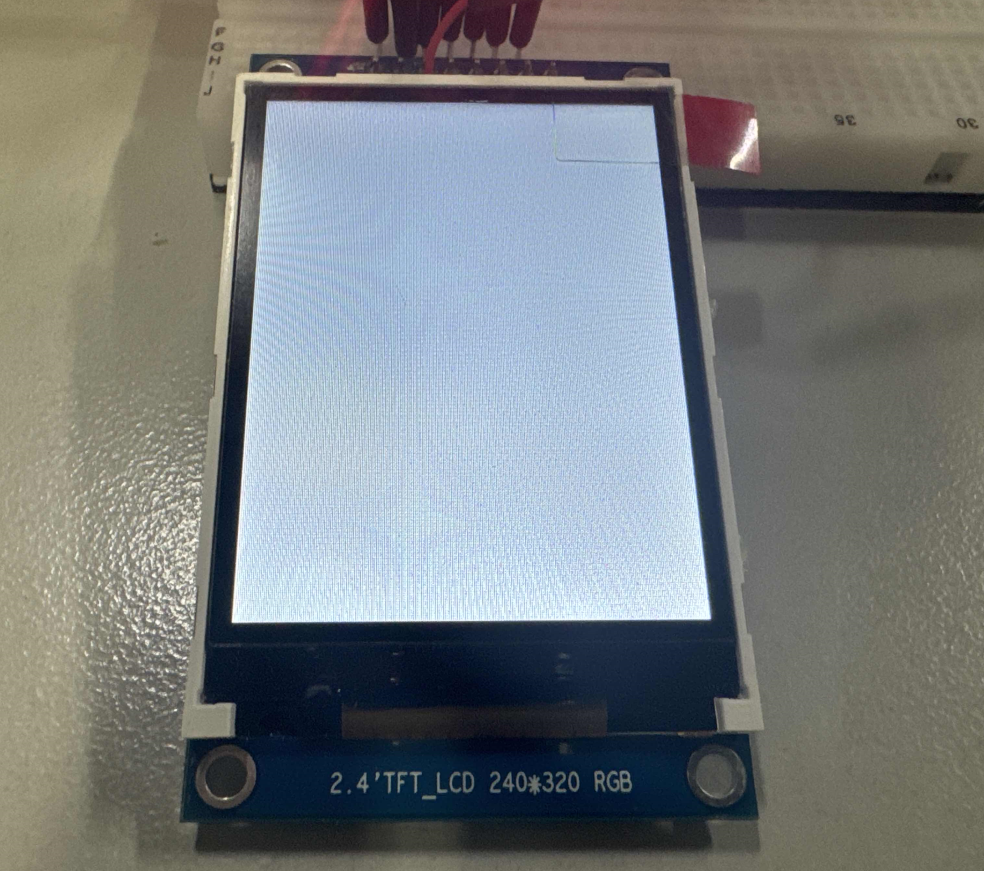
白屏是因为屏幕没有初始化,需要检查屏幕初始化序列或者初始化数据是否正确。
屏幕花屏
屏幕花屏,无法控制
花屏一般是因为屏幕初始化后没有正确设置
addrwin,或者初始化序列错误。LVGL 屏幕颜色不正确
出现反色,颜色异常

请配置 LVGL
LV_COLOR_DEPTH参数为 16,LV_COLOR_16_SWAP为 1,这是由 SPI LCD 的特性决定的。
显示反色
运行
test_spilcd,屏幕显示蓝色。这是由于屏幕启动了 RB SWAP,一般是
0x36寄存器修改正常显示
sunxi_lcd_cmd_write(sel, 0X36); sunxi_lcd_para_write(sel, 0x00);反色显示
sunxi_lcd_cmd_write(sel, 0X36); sunxi_lcd_para_write(sel, 0x08);LVGL 出现 DMA Over Size
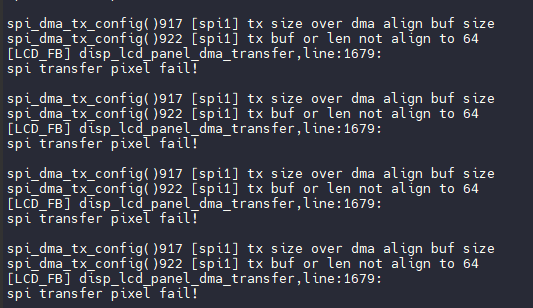
这是由于 LVGL 配置的
LV_COLOR_DEPTH为 32,但是 SPI 屏配置为16位。请修改lv_conf.h
出现部分花屏
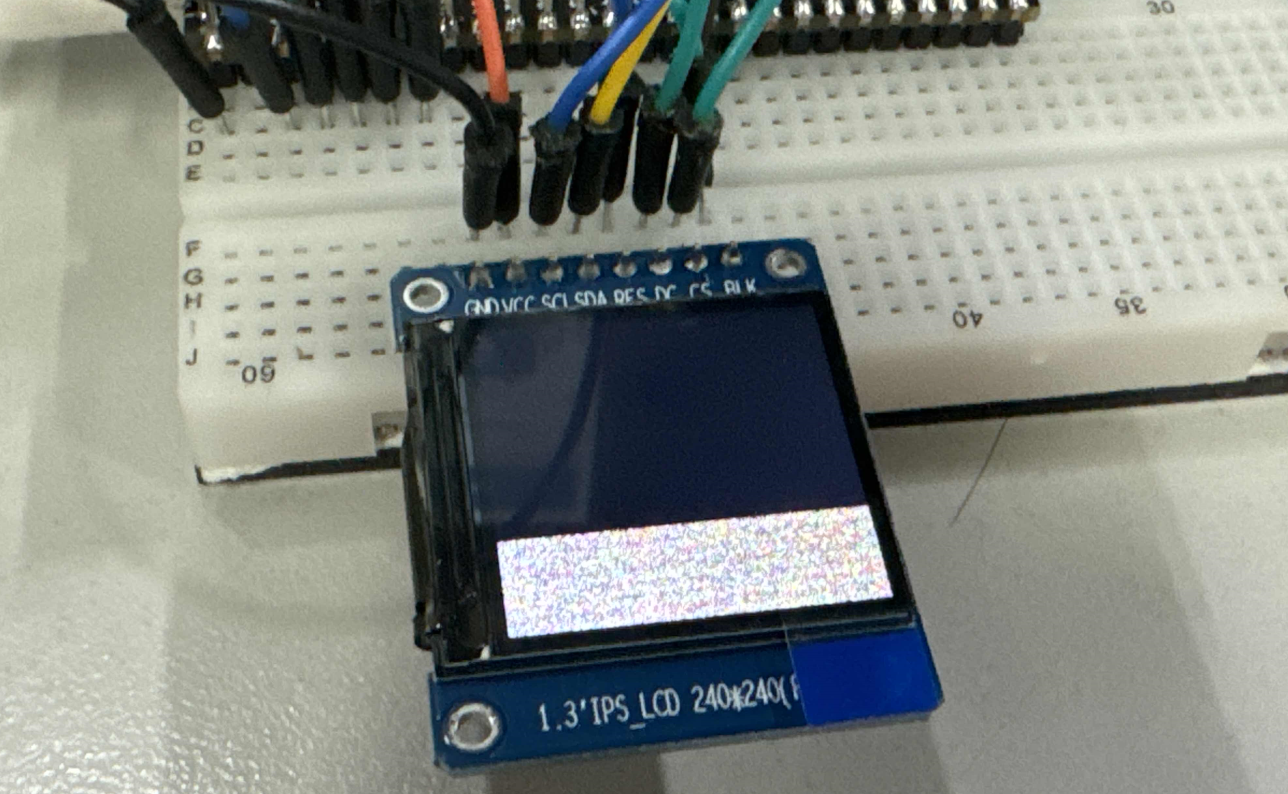
- 检查
address函数是否正确 - 检查
sys_config.fex屏幕配置分辨率是否正确
总结
调试LCD显示屏实际上就是调试发送端芯片(全志SOC)和接收端芯片(LCD屏上的driver IC)的一个过程:
- 添加屏驱动请看编写屏驱动
- 仔细阅读屏手册以及driver IC手册(有的话)。
- 仔细阅读板级显示配置参数详解。
- 确保LCD所需要的各路电源管脚正常。
SPI LCD 颜色相关问题
首先,得先确定显示屏使用的是SPI接口,还是DBI接口,不同的接口,输入数据的解析方式是不一样的。
DBI接口的全称是
Display Bus Serial Interface,在显示屏数据手册中,一般会说这是SPI接口,所以有人会误认为SPI屏可以使用normal spi去直接驱动。阅读
lcd_dbi_if部分的介绍可以知道,在3线模式时,发送命令前有1位A0用于指示当前发送的是数据,还是命令。而命令后面接着的数据就没有这个A0位了,代表SPI需要在9位和8位之间来回切换,而在读数据时,更是需要延时dummy clock才能读数据,normal spi都很难,甚至无法实现。所以normal spi只能模拟4 线的DBI的写操作。对于R128这类支持DBI接口的CPU,可以选择不去了解SPI。如果需要用到SPI去驱动显示屏,必须把显示屏设置成小端。
RGB565和RGB666
SPI显示屏一般支持RGB444,RGB565和RGB666,RGB444使用的比较少,所以只讨论RGB565和RGB666.
RGB565代表一个点的颜色由2字节组成,也就是R(红色)用5位表示,G(绿色)用6位表示,B(蓝色)用5位表示,如下图所示:

RGB666一个点的颜色由3字节组成,每个字节代表一个颜色,其中每个字节的低2位会无视,如下图所示:
SPI 接口
因为SPI接口的通讯效率不高,所以建议使用RGB565的显示,以
jlt35031c显示屏为例,他的显示驱动芯片是ST7789,设置显示格式的方式是往3a寄存器写入0x55(RGB565)或者0x66(RGB666),在R128SDK中,已经把jlt35031c的通讯格式写死为0x55,lcd_pixel_fmt配置选项无效:sunxi_lcd_cmd_write(sel, 0x3a); sunxi_lcd_para_write(sel, 0x55);在例程中,输入的数据是
0xff,0x00,0xff,0x00,对于SPI接口,是按字节发送。实际上,例程只需要每次发送2字节即可,因为前后发送的都是相同的ff 00,所以没有看出问题。根据对
565的数据解析,我们拆分ff 00就可以得到红色分量是0b11111,也就是31,绿色是0b111000,也就是56,,蓝色是0.我们等效转换成RGB888,有:R = 31/31*255 = 255 G = 56/63*255 = 226在调色板输入对应颜色,就可以得到黄色
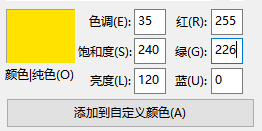
DBI 接口
因为
DBI通讯效率较高,所以可以使用RGB565或者RGB666,使用DBI接口,也就是lcd_if设置为1时,驱动会根据lcd_pixel_fmt配置寄存器,以SDK中的kld2844b.c为例,这显示屏的显示驱动也是ST7789,但是不同的屏幕,厂家封装时已经限制了通讯方式,所以即使是能使用 DBI 接口的驱动芯片的屏幕,或许也用不了DBI。sunxi_lcd_cmd_write(sel, 0x3A); /* Interface Pixel Format */ /* 55----RGB565;66---RGB666 */ if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_RGB_565 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGR_565) { sunxi_lcd_para_write(sel, 0x55); if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_RGB_565) rotate &= 0xf7; else rotate |= 0x08; } else if (info[sel].lcd_pixel_fmt < LCDFB_FORMAT_RGB_888) { sunxi_lcd_para_write(sel, 0x66); if (info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGRA_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_BGRX_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_ABGR_8888 || info[sel].lcd_pixel_fmt == LCDFB_FORMAT_XBGR_8888) { rotate |= 0x08; } } else { sunxi_lcd_para_write(sel, 0x66); }对于 DBI 格式,不再是以字节的形式去解析,而是以字的方式去解析,为了统一,软件已经规定了,
RGB565格式时,字大小是2字节,也就是16位,而RGB666格式时,字大小是4字节,也就是32位。对于
RGB565格式,同样是设置为0xff,0x00。因为屏幕是大端,而芯片存储方式是小端,所以芯片的 DBI 模块,会自动把数据从新排列,也就是实际上 DBI 发送数据时,会先发送0x00,再发送0xff,也就是红色分量为0,绿色分量为0b000111,也就是7,蓝色分量是0x11111,也就是31,我们同样转换成RGB888G = 7/63*255 = 28 B= 31/31*255 = 255在调色板上输入,可以得到蓝色。
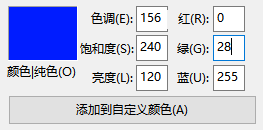
如果是
RGB666,虽然占用的是3个字节,但是没有CPU是3字节对齐的,所以需要一次性输入4字节,然后 DBI 硬件模块,会自动舍弃1个字节,软件同意舍弃了最后一个字节。依旧以例程为例,例程输入了
0xff,0x00,0xff,0x00,为了方便说明,标准为0xff(1),0x00(1),0xff(2),0x00(2),其中0x00(2)会被舍弃掉,然后发送顺序是0xff(2),0x00(1),0xff(1),也就是0xff(2)是红色分量,0xff(1)是蓝色分量,混合可以得到紫色。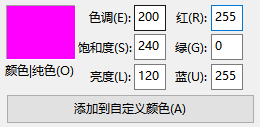
-
【R128】基础组件开发指南——RTOS 异构多核通信发布在 A Series
RTOS 异构多核通信
异构多核通信介绍
R128 所带有的 M33 主核心与 C906, HIFI5 DSP 核心是完全不同的核心,为了最大限度的发挥他们的性能,协同完成某一任务,所以在不同的核心上面运行的系统也各不相同。这些不同架构的核心以及他们上面所运行的软件组合在一起,就成了 AMP 系统 (Asymmetric Multiprocessing System, 异构多处理系统)。
为了多核心协同工作,对于需要异构多核通信框架需要满足以下功能:
- 隔离核间差异,把一部分服务部署在一个核上,另一部分服务部署在另外的核上,应用层代码只需通过标准接口来申请服务,其对底层服务具体在哪个核上实现无感知。
- 同一个核,既可作为远程服务端,也可以作为客户端。
针对异构多核系统的特性,在进行远程服务调用时,需要解决以下几个问题:
- 缓存一致性问题。缓存一致性是在异构多核系统中十分重要的问题,跨核调用者和服务提供者必须知道其使用的 buffer 是否会经过其他核的修改,是否会被其他核读取数据。若被其他核修改,那当前核使用时,需要先无效 buffer 对应的 dcache;若会被其他核读取,则当前核写完数据后,需要将 buffer 对应的 dcache 刷回下一级内存。如此一来,一旦远程服务的参数或返回值比较复杂,那么使用者和服务提供者就需要花大量的精力来理清每个 buffer 的使用关系,极大地增加了他们的负担。并且,为了避免对其他数据造成影响,冲刷 dcache 时也还需要保证其数据独占一个 cacheline,否则会将其他数据误刷。这也会增加处理缓存一致性问题的难度。
- CPU 位宽不一致问题。在 R128 项目中,HIFI5 的 CPU 位宽为 32bit,C906 的 CPU 位宽为64bit,M33 的 CPU 位宽为 32bit。对于三种不同的核,软件上指针变量、long 类型变量的数据大小并不一致,那么就会导致同一个结构体在不同位宽的核上,其内存布局并不一致,三个核若直接读取则会发生错误。
- 复杂场景处理问题。在多个核之间,需要考虑到远程服务端的并发处理能力、核间的嵌套调用关系、服务端函数的休眠、如何降低内存使用开销等。这些场景都是需要进行优化处理的,服务端的并发处理能力会影响到跨核远程服务的高效性;核间的嵌套调用以及服务函数的休眠,影响到远程调用服务的稳定性。
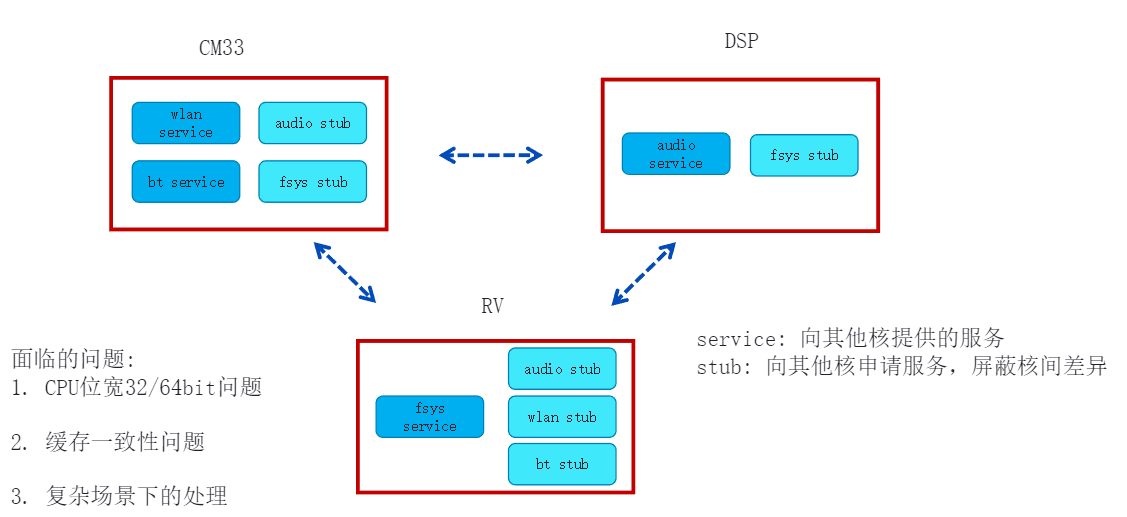
为了解决这些问题,提供了 Sunxi-AMP 框架提供异构通讯的接口。同时也提供了 rpdata 实现更加底层的异构通讯
Sunxi‑AMP 简介
Sunxi‑AMP 工作流程图
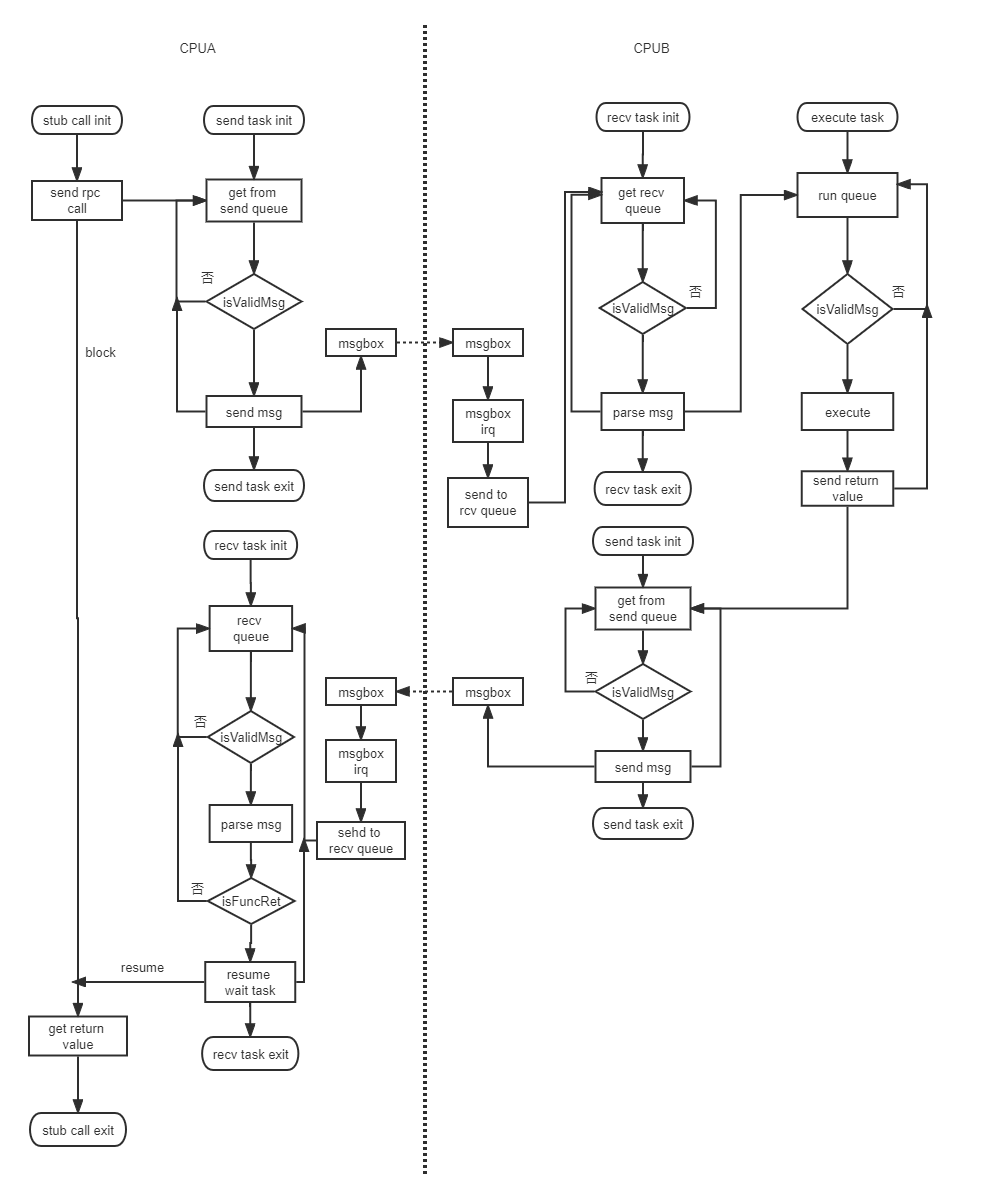
线程池
amp_threadpool.c文件中实现了一个简易线程池,在系统启动时创建指定线程数量的线程池,以提升远程消息的处理效率。若处理远程消息较多,无法及时处理,则由动态增加线程池中线程的数量;若消息较少,则动态删除线程池中的线程。初始化时创建的线程数量由amp_threadpool.h中的AMP_THD_POOL_MIN_NUM宏来决定,其也表示线程池中至少存在的最小数量的处理线程。AMP_THD_POOL_MAX_NUM表示线程池中能同时存在的处理线程的最大数量。动态新增处理线程的条件是消息接受队列中存在两个或以上的未处理消息并且当前线程池中存活线程数量小于AMP_THD_POOL_MAX_NUM。动态删除处理线程的条件是 (正在处理消息的线程的数量 * 2) 小于系统中存活线程数量并且当前线程池中存活线程数量大于AMP_THD_POOL_MAX_NUM。远程调用实现方式
Sunxi‑AMP 目前支持 1 种远程跨核调用实现方式:
- 参数指针传递:将远程跨核调用服务参数的指针或者数据值进行直接传递。如果参数是指针类型,则直接传递该指针;如果参数是数值,则直接传递该数值。参数指针传递比较适合参数结构体简单、核间数据传递量大的场景。其缺点是处理缓存一致性比较麻烦。
直接通过指针来传递参数及返回值,数据传递过程中可以免于拷贝,消耗内存较少,性能较高。
以
setConfig(struct config *data)函数为例,在发起setConfig远程调用时,会创建一个sunxi_amp_msg_args结构体,会将setConfig的参数依次设置到sunxi_amp_msg_args的args数组中,然后将sunxi_amp_msg的data字段设置为sunxi_amp_msg_args结构体地址。通过msgbox将sunxi_amp_msg发送给另外的一个核后,另外一个核重新组装sunxi_map_msg,即可拿到参数数据。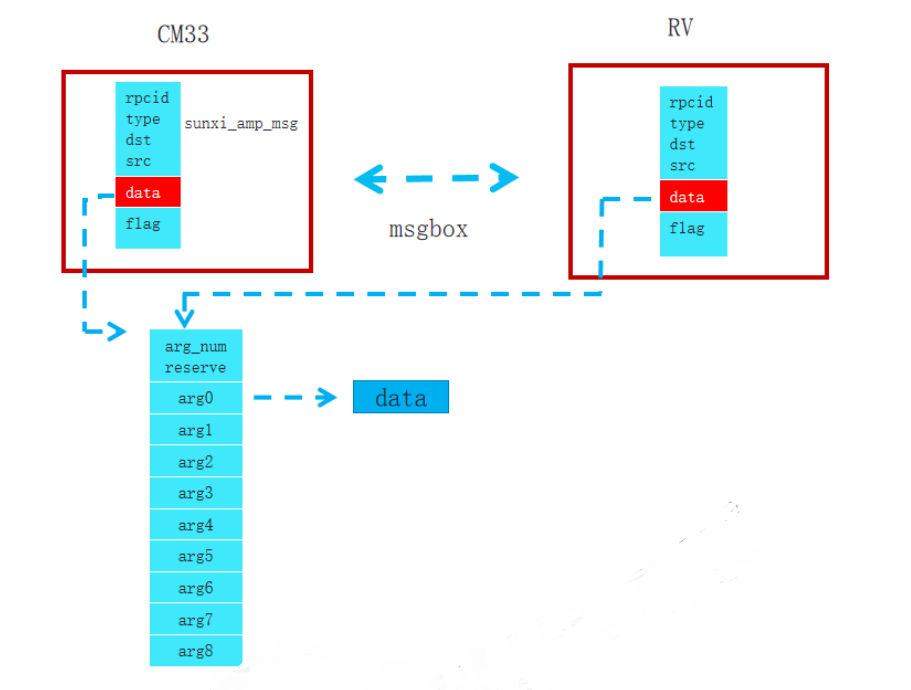
Sunxi‑AMP 数据结构
消息结构
sunxi_amp_msg结构体表示通过msgbox传输的消息内容,Sunxi‑AMP 远程跨核调用框架基于sunxi_amp_msg消息来完成各种功能。一个完整的sunxi_amp_msg,包含以下字段,总共 12字节。typedef struct _sunxi_amp_msg_t { uint32_t rpcid: 16; // 远程调用 ID 值,高 8 位表示 service id,低 8 位表示 function id uint32_t prio: 5; // 发送端任务优先级 uint32_t type: 5; // 消息类型 uint32_t src: 3; // 源地址,即表示从哪个核发出的消息 uint32_t dst: 3; // 目的地址,即表示该消息发送到哪个核上 uint32_t data; // 消息数据 uint32_t flags; // 消息标识,当前设置为线程句柄,用于在远程调用堵塞等待时唤醒该线程 } sunxi_amp_msg;其中远程调用的 ID 分为两个部分,高 8 位表示远程服务组 ID,低 8 位表示某个远程服务组中的
function ID,也就是最多支持 256 个远程服务组,每个远程服务组最多支持 256 个远程调用。下面以 FSYS 文件系统服务为例,介绍rpcid的组成及其计算方法。#define RPCCALL_FSYS(y) (RPCNO(RPCNO_FSYS, RPCHandler_FSYS_t, y) | (RPCSERVICE_FSYS_DIR << 29) | SELF_DIRECTION << 26)RPCCALL_FSYS(y)宏会自动计算rpcid以及src,dst三个字段的值。RPCSERVICE_FSYS_DIR表示FSYS服务所在的核,它用来设置dst字段。SELF_DIRECTION表示当前所在的核,用于设置 src 字段。RPCNO(RPCNO_FSYS,RPCHandler_FSYS_t, y)用于计算rpcid。其中,RPCNO_FSYS计算出service ID,放置于高 8 位,RPCNO计算出function ID,放置于低 8 位。
消息类型
MSG_SERIAL_FUNC_CALL // 序列化远程服务调用 MSG_SERIAL_FUNC_RET // 序列化远程服务返回值 MSG_SERIAL_FREE_BUFFER // 序列化远程服务释放内存 MSG_DIRECT_FUNC_CALL // 参数指针传递远程服务调用 MSG_DIRECT_FUNC_RET // 参数指针传递远程服务返回值指针传递远程调用时的参数结构体
sunxi_amp_msg_args用来表示使用指针传递远程调用时的参数信息,sunxi_amp_msg_args结构体的地址会被设置到sunxi_amp_msg的data字段进行传递。typedef struct _sunxi_amp_msg_args_t { uint32_t args_num: 8; uint32_t reserved; uint32_t args[SUNXI_AMP_MAX_ARGS_NUM]; } sunxi_amp_msg_args;远程调用服务的服务函数表
sunxi_amp_func_table用来表示远程调用服务的服务函数表。args_num表示该服务的参数个数,return_type表示该服务的返回值类型,func表示服务函数指针。typedef struct _sunxi_amp_func_table { uint32_t args_num: 8; uint32_t return_type: 8; sunxi_amp_service_func func; } sunxi_amp_func_table;Sunxi-AMP 源码结构
├── amp_core.c # Sunxi‑AMP 核心处理代码,包含消息解析等 ├── amp_msgbox.c # Sunxi‑AMP msgbox 对接封装 ├── amp_service.c # 远程服务数组 ├── amp_stub.c # 触发远程服务的钩子函数 ├── amp_test.c # Sunxi‑AMP 单核测试文件 ├── amp_threadpool.c # Sunxi‑AMP 线程池 ├── amp_threadpool.h # 线程池头文件 ├── Kconfig # 配置文件 ├── Makefile ├── msgbuffer.c # 对接 erpc 实现的源码,已废弃 ├── msgbuffer.h ├── service # 已支持的远程调用服务 │ ├── audio # 音频远程调用服务 │ ├── bt # 蓝牙远程调用服务 │ ├── demo # erpc 测试用例 │ ├── flashc # flashc驱动远程调用服务 │ ├── fsys # 文件系统远程调用服务 │ ├── misc # 杂项远程调用服务,主要用于操作命令传递之类的场景 │ ├── net # wifi 网络远程调用服务 │ ├── pm # 休眠唤醒远程调用服务 │ ├── rpcconsole # 控制台远程调用服务 │ ├── rpdata # 远程数据获取调用服务,用于屏蔽复杂操作,使开发者仅关心数据获取及发送 │ └── tfm # 安全系统远程调用服务 ├── sunxi_amp.h ├── sunxi_amp_msg.h ├── sunxi_amp_status.h ├── sunxi_amp_table.h └── tests # 多核通信压力测试 └── test_stress.c模块配置
M33 与 C906
System components ‑‑‑> aw components ‑‑‑> AMP Components Support ‑‑‑> [*] Tina RTOS AMP # 使能 Sunxi‑AMP 组件 [*] AMP Funcall Thread # 使能通过任务处理函数调用 [*] AMP Funcall ThreadPool # 使能线程池 [*] AMP Change Service Task Priority # 使能优先级传递Sunxi-AMP 接口说明
头文件
#include <sunxi_amp.h>远程调用服务函数结构体
typedef struct { sunxi_amp_func_table *RPCHandler_FSYS; sunxi_amp_func_table *RPCHandler_NET; sunxi_amp_func_table *RPCHandler_BT; sunxi_amp_func_table *RPCHandler_DEMO; sunxi_amp_func_table *RPCHandler_ARM_CONSOLE; sunxi_amp_func_table *RPCHandler_DSP_CONSOLE; sunxi_amp_func_table *RPCHandler_RV_CONSOLE; sunxi_amp_func_table *RPCHandler_PMOFM33; sunxi_amp_func_table *RPCHandler_PMOFRV; sunxi_amp_func_table *RPCHandler_PMOFDSP; sunxi_amp_func_table *RPCHandler_FLASHC; sunxi_amp_func_table *RPCHandler_M33_MISC; sunxi_amp_func_table *RPCHandler_RV_MISC; sunxi_amp_func_table *RPCHandler_DSP_MISC; sunxi_amp_func_table *RPCHandler_AUDIO; sunxi_amp_func_table *RPCHandler_RPDATA; sunxi_amp_func_table *RPCHandler_TFM; } RPCHandler_RPCT_t;AMP 信息结构体
typedef struct _sunxi_amp_info_t { QueueHandle_t send_queue; /*send to remote processor */ QueueHandle_t recv_queue; /*receive from remote processor */ TaskHandle_t sendTask; /*send to remote processor */ TaskHandle_t recvTask; /*receive from remote processor */ struct msg_endpoint sedp_arm; struct msg_endpoint sedp_rv; struct msg_endpoint sedp_dsp; sunxi_amp_wait wait; QueueHandle_t amp_msg_heap_mutex; } sunxi_amp_info;AMP 消息结构体
typedef struct _sunxi_amp_msg_t { uint32_t rpcid: 16; uint32_t prio: 5; uint32_t type: 5; uint32_t src: 3; uint32_t dst: 3; uint32_t data; uint32_t flags; } __attribute__((packed)) sunxi_amp_msg;AMP操作结构体
typedef struct _sunxi_amp_msg_ops { sunxi_amp_msg_func send_to_queue; sunxi_amp_msg_func send_to_dev; sunxi_amp_msg_func receive_from_dev; sunxi_amp_dev_init init; } sunxi_amp_msg_ops;AMP 消息类型枚举
enum MSG_TYPE { MSG_SERIAL_FUNC_CALL = 0, MSG_SERIAL_FUNC_RET, MSG_SERIAL_FREE_BUFFER, MSG_DIRECT_FUNC_CALL, MSG_DIRECT_FUNC_RET, MSG_TYPE_NUM, };AMP 消息返回值枚举
enum FUNC_RETURN_TYPE { RET_NULL = 0, RET_POINTER, RET_NUMBER_32, RET_NUMBER_64, };AMP 消息发送方向枚举
enum RPC_MSG_DIRECTION { RPC_MSG_DIR_UNKNOWN = 0, RPC_MSG_DIR_CM33 = 1, RPC_MSG_DIR_RV, RPC_MSG_DIR_DSP, };AMP 消息参数
typedef struct _sunxi_amp_msg_args_t { uint32_t args_num: 8; uint32_t reserved; uint32_t args[SUNXI_AMP_MAX_ARGS_NUM]; } __attribute__((packed)) sunxi_amp_msg_args;AMP 函数表结构体
typedef struct _sunxi_amp_func_table { uint32_t args_num: 8; uint32_t return_type: 8; sunxi_amp_service_func func; } sunxi_amp_func_table;获取 AMP 系统信息
函数原型
sunxi_amp_info *get_amp_info(void);参数:
- 无
返回值:
- sunxi_amp_info 结构体
AMP发送消息
函数原型
int hal_amp_msg_send(sunxi_amp_msg *msg);参数:
- msg:消息结构体
返回值:
- 0:成功
- -1:失败
获取 AMP 操作
函数原型
sunxi_amp_msg_ops *get_msg_ops(void);参数:
- 无
返回值:
- sunxi_amp_msg_ops:操作结构体
AMP接收消息
函数原型
int hal_amp_msg_recv(sunxi_amp_msg *msg);参数:
- msg:消息结构体
返回值:
- 0:成功
- -1:失败
发起远程函数调用
函数原型
unsigned long func_stub(uint32_t id, int haveRet, int stub_args_num, void *stub_args[]);参数:
- id : 远程服务函数的 ID 值
- haveRet :是否存在返回值,在实际使用中,为了保证函数调用的顺序,该值需为 1
- stub_args_num : 远程服务函数的参数个数
- stub_args : 远程服务函数的参数
返回值:
- 远程服务函数的返回值
申请 cacheline 对齐的内存
函数原型
void *amp_align_malloc(int size);参数:
- size : 需要申请的内存大小
返回值:
- 申请的内存地址
释放 cacheline 对齐的内存
函数原型
void amp_align_free(void *ptr);参数:
- ptr:需要释放的内存地址
返回值:
- 无
申请 AMP 内存
函数原型
void *amp_malloc(int size);参数:
- size : 需要申请的内存大小
返回值:
- 申请的内存地址
释放 AMP 内存
函数原型
void amp_free(void *ptr);参数:
- ptr:需要释放的内存地址
返回值:
- 无
Sunxi-AMP 使用范例
添加指针传递调用服务
添加指针传递远程调用服务的流程如下:
-
可参考
lichee/rtos‑components/aw/amp/service/fsys/远程文件系统服务。在lichee/rtos-components/aw/amp/service/下创建对应服务的文件夹fsys以及对应的service和stub端源文件,远程文件系统服务中为fsys_ser.c和fsys_stub.c。可参考Makefile和Kconfig添加编译、配置新的远程调用服务 -
在
fsys_ser.c中创建sunxi_amp_func_table数组fsys_table -
在
amp_service.c中将fsys_table添加到func_table数组中 -
在
sunxi_amp_table.h中添加文件系统远程服务组的结构体RPCHandler_FSYS_t,需要注意的是,RPCHandler_FSYS_t结构体的成员变量需要与sunxi_amp -
在
sunxi_amp.h的RPCHandler_RPCT_t结构体定义中添加RPCHandler_FSYS指针 -
在
sunxi_amp.h中定义以下宏
#define RPCNO_FSYS RPCCALL_RPCNO(RPCHandler_FSYS) #define RPCSERVICE_FSYS_DIR (RPC_MSG_DIR_RV) // 此处需要根据实际部署远程文件系统服务的核而修改 #define RPCCALL_FSYS(y) (RPCNO(RPCNO_FSYS, RPCHandler_FSYS_t, y) | (RPCSERVICE_FSYS_DIR << 28) | SELF_DIRECTION << 24)fsys_ser.c
#include <stdlib.h> #include <stdio.h> #include <string.h> #include <statfs.h> #include <dirent.h> #include <unistd.h> #include <fcntl.h> #include "sunxi_amp.h" #include <hal_cache.h> extern int truncate (const char *__file, __off_t __length); extern int fstatfs (int __fildes, struct statfs *__buf); static int _open(const char *name, int nameSize, int flag) { int ret; hal_dcache_invalidate((unsigned long)name, nameSize); ret = open(name, flag); hal_dcache_invalidate((unsigned long)name, nameSize); return ret; } static int _close(int fd) { return close(fd); } static ssize_t _read(int fd, void *buffer, size_t size) { ssize_t ret = -1; ret = read(fd, buffer, size); hal_dcache_clean((unsigned long)buffer, size); return ret; } static ssize_t _write(int fd, void *buffer, size_t size) { ssize_t ret = -1; hal_dcache_invalidate((unsigned long)buffer, size); ret = write(fd, buffer, size); hal_dcache_clean((unsigned long)buffer, size); return ret; } static off_t _lseek(int fd, off_t offset, int whence) { return lseek(fd, offset, whence); } static int _stat(const char *path, int pathSize, struct stat *st) { int ret = -1; hal_dcache_invalidate((unsigned long)st, sizeof(*st)); hal_dcache_invalidate((unsigned long)path, pathSize); ret = stat(path, st); hal_dcache_clean((unsigned long)st, sizeof(*st)); return ret; } static int _fstat(int fd, struct stat *st) { int ret = -1; hal_dcache_invalidate((unsigned long)st, sizeof(*st)); ret = fstat(fd, st); hal_dcache_clean((unsigned long)st, sizeof(*st)); return ret; } static int _unlink(const char *path, int pathSize) { int ret = -1; hal_dcache_invalidate((unsigned long)path, pathSize); ret = unlink(path); hal_dcache_invalidate((unsigned long)path, pathSize); return ret; } static int _rename(const char *old, int oldSize, const char *new, int newSize) { int ret = -1; hal_dcache_invalidate((unsigned long)new, newSize); hal_dcache_invalidate((unsigned long)old, oldSize); ret = rename(old, new); hal_dcache_invalidate((unsigned long)old, oldSize); hal_dcache_invalidate((unsigned long)new, newSize); return ret; } static DIR *_opendir(const char *path, int pathSize) { DIR *ret = NULL; hal_dcache_invalidate((unsigned long)path, pathSize); ret = opendir(path); if (ret) hal_dcache_clean((unsigned long)ret, sizeof(*ret)); hal_dcache_invalidate((unsigned long)path, pathSize); return ret; } static struct dirent *_readdir(DIR *pdir) { struct dirent *ret = NULL; ret = readdir(pdir); if (ret) hal_dcache_clean((unsigned long)ret, sizeof(*ret)); return ret; } static int _closedir(DIR *pdir) { return closedir(pdir); } static int _mkdir(const char *name, int nameSize, mode_t mode) { int ret; hal_dcache_invalidate((unsigned long)name, nameSize); ret = mkdir(name, mode); hal_dcache_invalidate((unsigned long)name, nameSize); return ret; } static int _rmdir(const char *name, int nameSize) { int ret; hal_dcache_invalidate((unsigned long)name, nameSize); ret = rmdir(name); hal_dcache_invalidate((unsigned long)name, nameSize); return ret; } static int _access(const char *name, int nameSize, int amode) { int ret; hal_dcache_invalidate((unsigned long)name, nameSize); ret = access(name, amode); hal_dcache_invalidate((unsigned long)name, nameSize); return ret; } static int _truncate(const char *name, int nameSize, off_t length) { int ret; hal_dcache_invalidate((unsigned long)name, nameSize); ret = truncate(name, length); hal_dcache_invalidate((unsigned long)name, nameSize); return ret; } static int _statfs(const char *name, int nameSize, struct statfs *buf) { int ret = -1; hal_dcache_invalidate((unsigned long)name, nameSize); ret = statfs(name, buf); hal_dcache_clean((unsigned long)buf, sizeof(*buf)); return ret; } static int _fstatfs(int fd, struct statfs *buf) { int ret = -1; ret = fstatfs(fd, buf); hal_dcache_clean((unsigned long)buf, sizeof(*buf)); return ret; } static int _fsync(int fd) { return fsync(fd); } sunxi_amp_func_table fsys_table[] = { {.func = (void *)&_open, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_close, .args_num = 1, .return_type = RET_POINTER}, {.func = (void *)&_read, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_write, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_lseek, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_fstat, .args_num = 2, .return_type = RET_POINTER}, {.func = (void *)&_stat, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_unlink, .args_num = 2, .return_type = RET_POINTER}, {.func = (void *)&_rename, .args_num = 4, .return_type = RET_POINTER}, {.func = (void *)&_opendir, .args_num = 2, .return_type = RET_POINTER}, {.func = (void *)&_readdir, .args_num = 1, .return_type = RET_POINTER}, {.func = (void *)&_closedir, .args_num = 1, .return_type = RET_POINTER}, {.func = (void *)&_mkdir, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_rmdir, .args_num = 2, .return_type = RET_POINTER}, {.func = (void *)&_access, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_truncate, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_statfs, .args_num = 3, .return_type = RET_POINTER}, {.func = (void *)&_fstatfs, .args_num = 2, .return_type = RET_POINTER}, {.func = (void *)&_fsync, .args_num = 1, .return_type = RET_POINTER}, };fsys_stub.c
#include <stdlib.h> #include <stdio.h> #include <string.h> #include <reent.h> #include "sunxi_amp.h" #include <hal_cache.h> #ifndef _MAYBE_STATIC #include <statfs.h> #include <dirent.h> #else struct dirent { int d_ino; /*!< file number */ uint8_t d_type; /*!< not defined in POSIX, but present in BSD and Linux */ #define DT_UNKNOWN 0 #define DT_REG 1 #define DT_DIR 2 char d_name[256]; /*!< zero-terminated file name */ }; typedef __uint64_t __fsblkcnt_t; struct statfs { uint32_t f_type; uint32_t f_bsize; __fsblkcnt_t f_blocks; __fsblkcnt_t f_bfree; __fsblkcnt_t f_bavail; __fsfilcnt_t f_files; __fsfilcnt_t f_ffree; }; typedef struct { uint16_t dd_vfs_idx; /*!< VFS index, not to be used by applications */ uint16_t dd_rsv; /*!< field reserved for future extension */ /* remaining fields are defined by VFS implementation */ } DIR; #endif MAYBE_STATIC int open(const char *name, int flag, ...) { void *args[3] = {0}; int ret = -1; int nameSize = strlen(name) + 1; char *align_name = amp_align_malloc(nameSize); if (!align_name) { return -1; } memset(align_name, 0, nameSize); memcpy(align_name, name, nameSize); args[0] = align_name; args[1] = (void *)(unsigned long)nameSize; args[2] = (void *)(unsigned long)flag; hal_dcache_clean((unsigned long)align_name, nameSize); ret = func_stub(RPCCALL_FSYS(open), 1, ARRAY_SIZE(args), args); amp_align_free(align_name); return ret; } MAYBE_STATIC int close(int fd) { void *args[1] = {0}; args[0] = (void *)(unsigned long)fd; return func_stub(RPCCALL_FSYS(close), 1, ARRAY_SIZE(args), args); } MAYBE_STATIC ssize_t read(int fd, void *buffer, size_t size) { void *args[3] = {0}; ssize_t ret = -1; args[0] = (void *)(unsigned long)fd; args[1] = buffer; args[2] = (void *)(unsigned long)size; if (fd < 3) { return _read_r(_REENT, fd, buffer, size); } hal_dcache_invalidate((unsigned long)buffer, size); ret = func_stub(RPCCALL_FSYS(read), 1, ARRAY_SIZE(args), args); hal_dcache_invalidate((unsigned long)buffer, size); return ret; } MAYBE_STATIC ssize_t write(int fd, void *buffer, size_t size) { void *args[3] = {0}; args[0] = (void *)(unsigned long)fd; args[1] = buffer; args[2] = (void *)(unsigned long)size; if (fd < 3) { return _write_r(_REENT, fd, buffer, size); } hal_dcache_clean((unsigned long)buffer, size); return func_stub(RPCCALL_FSYS(write), 1, ARRAY_SIZE(args), args); } MAYBE_STATIC off_t lseek(int fd, off_t offset, int whence) { void *args[3] = {0}; args[0] = (void *)(unsigned long)fd; args[1] = (void *)(unsigned long)offset; args[2] = (void *)(unsigned long)whence; return func_stub(RPCCALL_FSYS(lseek), 1, ARRAY_SIZE(args), args); } #ifndef _MAYBE_STATIC MAYBE_STATIC int fstat(int fd, struct stat *st) { void *args[2] = {0}; int ret = -1; struct stat *st_align = amp_align_malloc(sizeof(*st)); if (!st_align) { return -1; } memset(st_align, 0, sizeof(*st)); args[0] = (void *)(unsigned long)fd; args[1] = st_align; hal_dcache_clean((unsigned long)st_align, sizeof(struct stat)); ret = func_stub(RPCCALL_FSYS(fstat), 1, ARRAY_SIZE(args), args); hal_dcache_invalidate((unsigned long)st_align, sizeof(struct stat)); memcpy(st, st_align, sizeof(struct stat)); amp_align_free(st_align); return ret; } MAYBE_STATIC int stat(const char *path, struct stat *st) { void *args[3] = {0}; int ret = -1; int pathSize = strlen(path) + 1; char *align_path = amp_align_malloc(pathSize); if (!align_path) { return -1; } memset(align_path, 0, pathSize); memcpy(align_path, path, pathSize); struct stat *st_align = amp_align_malloc(sizeof(*st)); if (!st_align) { amp_align_free(align_path); return -1; } memset(st_align, 0, sizeof(*st)); args[0] = align_path; args[1] = (void *)(unsigned long)pathSize; args[2] = st_align; hal_dcache_clean((unsigned long)align_path, pathSize); hal_dcache_clean((unsigned long)st_align, sizeof(struct stat)); ret = func_stub(RPCCALL_FSYS(stat), 1, ARRAY_SIZE(args), args); hal_dcache_invalidate((unsigned long)st_align, sizeof(struct stat)); memcpy(st, st_align, sizeof(struct stat)); amp_align_free(st_align); amp_align_free(align_path); return ret; } #endif MAYBE_STATIC int unlink(const char *path) { void *args[2] = {0}; int ret = -1; int pathSize = strlen(path) + 1; char *align_path = amp_align_malloc(pathSize); if (!align_path) { return -1; } memset(align_path, 0, pathSize); memcpy(align_path, path, pathSize); args[0] = align_path; args[1] = (void *)(unsigned long)pathSize; hal_dcache_clean((unsigned long)align_path, pathSize); ret = func_stub(RPCCALL_FSYS(unlink), 1, ARRAY_SIZE(args), args); amp_align_free(align_path); return ret; } #ifndef _MAYBE_STATIC MAYBE_STATIC int rename(const char *old, const char *new) { void *args[4] = {0}; int ret = -1; int oldSize = strlen(old) + 1; int newSize = strlen(new) + 1; char *align_old = amp_align_malloc(oldSize); if (!align_old) { return -1; } char *align_new = amp_align_malloc(newSize); if (!align_new) { amp_align_free(align_old); return -1; } memset(align_new, 0, newSize); memcpy(align_new, new, newSize); memset(align_old, 0, oldSize); memcpy(align_old, old, oldSize); args[0] = align_old; args[1] = (void *)(unsigned long)oldSize; args[2] = align_new; args[3] = (void *)(unsigned long)newSize; hal_dcache_clean((unsigned long)align_old, oldSize); hal_dcache_clean((unsigned long)align_new, newSize); ret = func_stub(RPCCALL_FSYS(rename), 1, ARRAY_SIZE(args), args); amp_align_free(align_old); amp_align_free(align_new); return ret; } #endif MAYBE_STATIC DIR *opendir(const char *path) { DIR *ret = NULL; void *args[2] = {0}; int pathSize = strlen(path) + 1; char *align_path = amp_align_malloc(pathSize); if (!align_path) { return NULL; } memset(align_path, 0, pathSize); memcpy(align_path, path, pathSize); args[0] = align_path; args[1] = (void *)(unsigned long)pathSize; hal_dcache_clean((unsigned long)align_path, pathSize); ret = (void *)func_stub(RPCCALL_FSYS(opendir), 1, ARRAY_SIZE(args), args); if (ret) { hal_dcache_invalidate((unsigned long)ret, sizeof(*ret)); } amp_align_free(align_path); return ret; } MAYBE_STATIC struct dirent *readdir(DIR *pdir) { struct dirent *ent = NULL; void *args[1] = {0}; args[0] = pdir; hal_dcache_clean((unsigned long)pdir, sizeof(*pdir)); ent = (void *)func_stub(RPCCALL_FSYS(readdir), 1, ARRAY_SIZE(args), args); if (ent) { hal_dcache_invalidate((unsigned long)ent, sizeof(*ent)); } return ent; } MAYBE_STATIC int closedir(DIR *pdir) { void *args[1] = {0}; args[0] = pdir; hal_dcache_clean((unsigned long)pdir, sizeof(*pdir)); return func_stub(RPCCALL_FSYS(closedir), 1, ARRAY_SIZE(args), args); } #ifndef _MAYBE_STATIC MAYBE_STATIC int mkdir(const char *name, mode_t mode) { void *args[3] = {0}; int ret = -1; int nameSize = strlen(name) + 1; char *align_name = amp_align_malloc(nameSize); if (!align_name) { return -1; } memset(align_name, 0, nameSize); memcpy(align_name, name, nameSize); args[0] = align_name; args[1] = (void *)(unsigned long)nameSize; args[2] = (void *)(unsigned long)mode; hal_dcache_clean((unsigned long)align_name, nameSize); ret = func_stub(RPCCALL_FSYS(mkdir), 1, ARRAY_SIZE(args), args); amp_align_free(align_name); return ret; } #endif MAYBE_STATIC int rmdir(const char *name) { void *args[2] = {0}; int ret = -1; int nameSize = strlen(name) + 1; char *align_name = amp_align_malloc(nameSize); if (!align_name) { return -1; } memset(align_name, 0, nameSize); memcpy(align_name, name, nameSize); args[0] = align_name; args[1] = (void *)(unsigned long)nameSize; hal_dcache_clean((unsigned long)align_name, nameSize); ret = func_stub(RPCCALL_FSYS(rmdir), 1, ARRAY_SIZE(args), args); amp_align_free(align_name); return ret; } MAYBE_STATIC int access(const char *name, int amode) { void *args[3] = {0}; int ret = -1; int nameSize = strlen(name) + 1; char *align_name = amp_align_malloc(nameSize); if (!align_name) { return -1; } memset(align_name, 0, nameSize); memcpy(align_name, name, nameSize); args[0] = align_name; args[1] = (void *)(unsigned long)nameSize; args[2] = (void *)(unsigned long)amode; hal_dcache_clean((unsigned long)align_name, nameSize); ret = func_stub(RPCCALL_FSYS(access), 1, ARRAY_SIZE(args), args); amp_align_free(align_name); return ret; } MAYBE_STATIC int truncate(const char *name, off_t length) { void *args[3] = {0}; int ret = -1; int nameSize = strlen(name) + 1; char *align_name = amp_align_malloc(nameSize); if (!align_name) { return -1; } memset(align_name, 0, nameSize); memcpy(align_name, name, nameSize); args[0] = align_name; args[1] = (void *)(unsigned long)nameSize; args[2] = (void *)(unsigned long)length; hal_dcache_clean((unsigned long)align_name, nameSize); ret = func_stub(RPCCALL_FSYS(truncate), 1, ARRAY_SIZE(args), args); amp_align_free(align_name); return ret; } MAYBE_STATIC int statfs(const char *path, struct statfs *buf) { void *args[3] = {0}; int ret = -1; int pathSize = strlen(path) + 1; char *align_path = amp_align_malloc(pathSize); if (!align_path) { return -1; } char *align_statfs = amp_align_malloc(sizeof(struct statfs)); if (!align_statfs) { amp_align_free(align_statfs); return -1; } memset(align_path, 0, pathSize); memcpy(align_path, path, pathSize); memset(align_statfs, 0, sizeof(struct statfs)); args[0] = align_path; args[1] = (void *)(unsigned long)pathSize; args[2] = align_statfs; hal_dcache_clean((unsigned long)align_path, pathSize); hal_dcache_clean((unsigned long)align_statfs, sizeof(struct statfs)); ret = func_stub(RPCCALL_FSYS(statfs), 1, ARRAY_SIZE(args), args); hal_dcache_invalidate((unsigned long)align_statfs, sizeof(struct statfs)); memcpy(buf, align_statfs, sizeof(struct statfs)); amp_align_free(align_path); amp_align_free(align_statfs); return ret; } MAYBE_STATIC int fstatfs(int fd, struct statfs *buf) { void *args[2] = {0}; int ret = -1; char *align_statfs = amp_align_malloc(sizeof(struct statfs)); if (!align_statfs) { return -1; } args[0] = (void *)(unsigned long)fd; args[1] = align_statfs; hal_dcache_clean((unsigned long)align_statfs, sizeof(struct statfs)); ret = func_stub(RPCCALL_FSYS(fstatfs), 1, ARRAY_SIZE(args), args); hal_dcache_invalidate((unsigned long)align_statfs, sizeof(struct statfs)); memcpy(buf, align_statfs, sizeof(struct statfs)); amp_align_free(align_statfs); return ret; } MAYBE_STATIC int fsync(int fd) { void *args[1] = {0}; args[0] = (void *)(unsigned long)fd; return func_stub(RPCCALL_FSYS(fsync), 1, ARRAY_SIZE(args), args); }RPCLI 跨核终端实现
rpcconsole_stub.c
#include <stdio.h> #include <stdint.h> #include <string.h> #include <stdlib.h> #include <console.h> #include <sunxi_amp.h> #include <hal_cache.h> #define SEND_TO_32BIT (1) #define SEND_TO_64BIT (2) struct rpcconsole_arg_t { uint32_t argc; uint32_t flag; uint64_t argv_64[SUNXI_AMP_SH_MAX_CMD_ARGS]; uint32_t argv_32[SUNXI_AMP_SH_MAX_CMD_ARGS]; union { char *argv_cmd; uint64_t argv_cmd_data; }; }; static int cmd_rpcconsole(int argc, char **argv) { int ret = -1; int i; if (argc <= 2) { printf("Usage: rpccli [arm|dsp|rv] commandname [arg0 ...] \n"); return -1; } if (argc > SUNXI_AMP_SH_MAX_CMD_ARGS) { printf("maximum number of arg:%d\n", SUNXI_AMP_SH_MAX_CMD_ARGS); return -1; } struct rpcconsole_arg_t *rpc_arg = amp_align_malloc(sizeof(struct rpcconsole_arg_t)); if (rpc_arg == NULL) { printf("Alloc memory failed!\n"); return -1; } memset(rpc_arg, 0, sizeof(struct rpcconsole_arg_t)); char *rpc_args_cmd = amp_align_malloc(SH_MAX_CMD_LEN); if (rpc_args_cmd == NULL) { printf("Alloc memory failed!\n"); amp_align_free(rpc_arg); return -1; } memset(rpc_args_cmd, 0, SH_MAX_CMD_LEN); rpc_arg->argv_cmd = rpc_args_cmd; rpc_arg->argc = argc - 2; for (i = 2; i < argc; i++) { rpc_arg->argv_32[i - 2] = (uint32_t)(unsigned long)rpc_args_cmd; rpc_arg->argv_64[i - 2] = (uint32_t)(unsigned long)rpc_args_cmd; memcpy(rpc_args_cmd, argv[i], strlen(argv[i])); rpc_args_cmd += ALIGN_UP((strlen(argv[i]) + 1), 4); } void *args[1] = {0}; args[0] = rpc_arg; if (!strcmp("arm", argv[1])) { rpc_arg->flag = SEND_TO_32BIT; hal_dcache_clean((unsigned long)rpc_arg, sizeof(*rpc_arg)); hal_dcache_clean((unsigned long)rpc_arg->argv_cmd, SH_MAX_CMD_LEN); ret = func_stub(RPCCALL_ARM_CONSOLE(exe_cmd), 1, 1, (void *)&args); } else if (!strcmp("dsp", argv[1])) { rpc_arg->flag = SEND_TO_32BIT; hal_dcache_clean((unsigned long)rpc_arg, sizeof(*rpc_arg)); hal_dcache_clean((unsigned long)rpc_arg->argv_cmd, SH_MAX_CMD_LEN); ret = func_stub(RPCCALL_DSP_CONSOLE(exe_cmd), 1, 1, (void *)&args); } else if (!strcmp("rv", argv[1])) { rpc_arg->flag = SEND_TO_64BIT; hal_dcache_clean((unsigned long)rpc_arg, sizeof(*rpc_arg)); hal_dcache_clean((unsigned long)rpc_arg->argv_cmd, SH_MAX_CMD_LEN); ret = func_stub(RPCCALL_RV_CONSOLE(exe_cmd), 1, 1, (void *)&args); } amp_align_free(rpc_arg->argv_cmd); amp_align_free(rpc_arg); return ret; } FINSH_FUNCTION_EXPORT_CMD(cmd_rpcconsole, rpccli, exe);rpcconsole_ser.c
#include <stdio.h> #include <stdint.h> #include <string.h> #include <stdlib.h> #include <console.h> #include <barrier.h> #include <sunxi_amp.h> #include <hal_cache.h> #define SEND_TO_32BIT (1) #define SEND_TO_64BIT (2) struct rpcconsole_arg_t { uint32_t argc; uint32_t flag; uint64_t argv_64[SUNXI_AMP_SH_MAX_CMD_ARGS]; uint32_t argv_32[SUNXI_AMP_SH_MAX_CMD_ARGS]; union { char *argv_cmd; uint64_t argv_cmd_data; }; }; static int _execute_cmd(struct rpcconsole_arg_t *rpc_arg) { char *command_name; struct finsh_syscall *call; int ret = -1; hal_dcache_invalidate((unsigned long)rpc_arg, (unsigned long)sizeof(*rpc_arg)); #ifndef CONFIG_ARCH_DSP dsb(); isb(); #endif hal_dcache_invalidate((unsigned long)rpc_arg->argv_cmd, SH_MAX_CMD_LEN); if (rpc_arg->flag == SEND_TO_32BIT) { command_name = (char *)(unsigned long)(rpc_arg->argv_32[0]); } else { command_name = (char *)(unsigned long)(rpc_arg->argv_64[0]); } call = finsh_syscall_lookup(command_name); if (call == NULL || call->func == NULL) { printf("The command(%s) no exist !\n", command_name); return -1; } if (rpc_arg->flag == SEND_TO_32BIT) { ret = call->func(rpc_arg->argc, (char **)(unsigned long)rpc_arg->argv_32); } else { ret = call->func(rpc_arg->argc, (char **)(unsigned long)rpc_arg->argv_64); } hal_dcache_invalidate((unsigned long)rpc_arg, (unsigned long)sizeof(*rpc_arg)); hal_dcache_invalidate((unsigned long)rpc_arg->argv_cmd, SH_MAX_CMD_LEN); return ret; } sunxi_amp_func_table console_table[] = { {.func = (void *)&_execute_cmd, .args_num = 1, .return_type = RET_POINTER}, };Sunxi‑AMP 注意事项
-
注意多核通信时的数据
Buffer的起始地址和长度,起始地址要求按照系统中最大的CacheLine(64B)对齐,长度要求数据Buffer独占CacheLine,不允许和其他数据共享CacheLine。 -
如果在远程调用过程中,需要将内存数据传递给另外的 CPU 处理器,在执行远程函数调用前需要调用
hal_dcache_clean将调用核的CPU Dcache数据刷回内存介质,可以参考lichee/rtos‑components/aw/amp/service/flashc/flashc_stub.c中的nor_write函数;如果需要从另外的处理器获取数据,在执行远程函数调用后,需要执行hal_dcache_invalidate将本地CPU Dcache无效掉,以避免获取旧的历史数据,可以参考lichee/rtos‑components/aw/amp/service/flashc/flashc_stub.c中的nor_read函数。 -
注意
Cache的Dirty位。桩子函数 (stub端) 需要先将传给服务函数 (service端) 的buffer所对应的cacheline无效,重点在于清除dirty位,否则在cachelien颠簸换出的过程中,可能会导致运行桩子函数所在核将buffer对应的脏cacheline换出并回写,覆盖另外一个核刚写的数据。服务函数 (service端) 需要将不再使用的buffer对应的cacheline无效掉或者刷回内存,重点在于清除dirty位,以预防在cahcline颠簸换出的过程中将buffer对应的脏cacheline中的数据回写,此时极有可能篡改另外一个核的数据。举例分析:在
lichee/rtos‑components/aw/amp/service/flashc/flashc_stub.c中的nor_read函数中,核在调用func_stub(RPCCALL_FLASHC(nor_read), 1, ARRAY_SIZE(args), args);之前,需要先调用hal_dcache_clean_invalidate((unsigned long)buffer, size);接口清除buffer对应cacheline的dirty位,否则在程序运行中,可能会导致 M33 核的服务函数刚将数据刷回内存,C906 核又因为cacheline的换出把buffer的数据给修改了。同理,在lichee/rtos‑components/aw/amp/service/flashc/flashc_ser.c的_nor_write函数中,M33 核在调用完nor_write之后,需要再一次调用hal_dcache_invalidate((unsigned long)buf, size);,因为nor_write中可能存在修改buffer数据的可能性,这样的话buffer对应的cacheline在 M33核上就是脏的,在 M33 核运行的过程中,极有可能会将脏数据写入内存。而此时,buffer在C906 上可能已被申请释放挪为他用,M33 核将脏数据写回内存就直接篡改了 C906 上运行的正常数据。 -
当前支持的最大参数个数为 8 个。
-
64bit 数据在传输过程中一律被截断为 32bit 数据。
-
不可在中断函数中使用远程调用。
-
在
sunxi_amp.h中添加#define AMP_DEBUG,则会在关键节点中使能组件的调试信息输出,用于分析远程函数调用错误等问题。 -
在多个核之间传递同一个结构体时,该结构内部尽量不要使用指针类型,主要的原因在于因三个核位宽不一致,对指针类型的长度理解存在差异,那么就会导致结构体内的数据布局存在差异。当两个不同位宽的 CPU 通过同一个结构体指针指向的地址取值时,就会导致取值错误。如以下例子:
struct test_t { char *ptr; int offset; }; struct test_t a; ptr = &a; // ptr 为指向 struct test_t 结构体的指针,假设其地址为 0x4000000; int offset = ptr‑>offset // 在 32bit 系统会去访问 0x4000004; int offset = ptr‑>offset // 在 64bit 系统会去访问 0x4000008;RPDATA 核间通讯
为了不同核之间的通信交互,基于硬件 msgbox 功能,软件上提供了 AMP 通信机制,而在该机制上我们提供了 rpdata 接口,让用户可以较容易实现核间通信。
rpdata 接口介绍
创建 rpdata
rpdata_t *rpdata_create(int dir, const char *type, const char *name, size_t buf_len)参数:
- dir: 指定远端核。 1:M33; 2:RV; 3:DSP
- type: 类型,传输数据类型,字符串可自定义,类型和名称一起构成唯一标识
- name: 名称,传输数据名称,字符串可自定义,类型和名称一起构成唯一标识
- buf_len: buffer大小,该buffer用于临时保存跨核传输数据
返回值:
- 成功则返回rpdata句柄,失败返回NULL。
type 和 name 用于标识唯一的传输通道, 可自行设定,长度不超过 16 个字节即可。可以通过 rpd ‑l 命令查看当前已经申请的 rpdata 以及对应的状态。rpdata_create 函数不会阻塞。在创建的时候,可以直接调用。
连接 rpdata
rpdata_t *rpdata_connect(int dir, const char *type, const char *name)参数:
- dir: 指定远端核。 1:M33; 2:RV; 3:DSP
- type: 类型,传输数据类型,字符串可自定义,类型和名称一起构成唯一标识
- name: 名称,传输数据名称,字符串可自定义,类型和名称一起构成唯一标识
返回值:
- 成功则返回rpdata句柄,失败返回NULL。
rpdata_create 和 rpdata_connect 作用是类似的,但是前者会创建用于传输数据的 buffer,后者不会。因此两核之间通信,必须分别使用这两个接口,而不能共同使用 rpdata_create 或者 rpdata_connect。rpdata_connect 函数会阻塞。如果远核没有调用 rpdata_create,那么就会一直阻塞线程。注意使用 rpdata_connect,如果
需要等待远端线程,请确认该线程是否可以阻塞,不行的话,需要使用线程单独等待。得到 buffer 的值
void *rpdata_buffer_addr(rpdata_t *rpd)参数:
- rpd: rpdata句柄
返回值:
- buff的值
该 buffer 地址可用于保存要传输交互的数据
判断 rpdata 是否为连接状态
int rpdata_is_connect(rpdata_t *rpd)参数:
- rpd: rpdata句柄
返回值:
- 返回0表示为连接状态,非0表示非连接状态
等待 rpdata 变成连接状态
int rpdata_wait_connect(rpdata_t *rpd)参数:
- rpd: rpdata句柄
返回值:
- 成功则返回0,失败返回非0。
需要判断等待 rpdata 为连接状态后,才可以开始数据传输。
跨核数据处理
用于发送数据到远端核,并且远端核把处理后数据填充到 buffer
int rpdata_process(rpdata_t *rpd, unsigned int offset, unsigned int data_len)参数:
-
rpd: rpdata句柄
-
offset: 相对于buffer的偏移
-
data_len: 数据量,字节
返回值:
- 成功则返回0,失败返回非0。
处理后的结果会存于 buffer 中,即 rpdata_buffer_addr 得到的地址。
跨核数据发送
仅用于发送数据到远端核
int rpdata_send(rpdata_t *rpd, unsigned int offset, unsigned int data_len)参数:
-
rpd: rpdata句柄
-
offset: 相对于buffer的偏移
-
data_len: 数据量,字节
返回值:
- 成功则返回0,失败返回非0。
rpdata_send 只是把 buffer 中数据发送到远端核,而 rpdata_process 会得到处理后数据
接受跨核传输的数据
int rpdata_recv(rpdata_t *rpd, unsigned int *offset, unsigned int *data_len, int timeout_ms)参数:
-
rpd: rpdata句柄
-
offset: 得到相对于buffer的偏移
-
data_len: 得到数据量,字节
-
timeout_ms: 等待超时时间
返回值:
- 成功则返回0,失败返回非0。
使用该接口,需要增加 ringbuffer 模式,否则有可能会出现数据覆盖的现象。
设置数据接受回调
int rpdata_set_recv_cb(rpdata_t *rpd, struct rpdata_cbs *cbs)参数:
- rpd: rpdata句柄
- cbs: 回到函数集,当前仅支持recv_cb,即接受回调
返回值:
- 成功则返回0,失败返回非0。
数据接受回调函数
int (recv_cb_t)(rpdata_t rpd, void *data, int data_len)注意在该回调用把数据处理好,或者拷贝出来,否则有可能会被下次数据传输覆盖
销毁 rpdata
int rpdata_destroy(rpdata_t *rpd)参数:
- rpd: rpdata句柄
返回值:
- 成功则返回0,失败返回非0。
只有两核都调用 rpdata_destroy 才会真正的销毁,但对调用顺序不做要求。
rpdata 使用流程
sequenceDiagram M33->>+M33: rpdata_create M33->>-RV: notify RV->>+RV: rpdata_create RV->>-M33: ack RV->>RV: rpdata_set_recv_cb loop 多次发送 Note left of M33: rpdata_send M33->>RV: send data Note right of RV: 触发 callback end RV->>M33: notify RV->>RV: rpdata_destory M33->>RV: wait destory- rpdata_create 和 rpdate_connect 的调用顺序不做要求,谁先执行都可以;但是 rpdata_data 是会创建用于数据交互的 buffer
- 接受数据端可以选择使用 rpdata_set_recv_cb 设置回调来处理数据,或者调用 rpdata_recv 阻塞等待接受互数据。
- 两个核的 rpdata_destroy 调用顺序也是不做要求的。
rpdata 示例
#include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> #include <FreeRTOS.h> #include <task.h> #include <queue.h> #include <rpdata.h> #include <console.h> #include <hal_time.h> #include <hal_mem.h> #include <hal_thread.h> #include <md5.h> //#define RECV_CALLBACK_TEST /* print md5 check result */ static int g_rpd_verbose = 0; #define configAPPLICATION_RPDATA_DEMO_PRIORITY \ (configMAX_PRIORITIES > 20 ? configMAX_PRIORITIES - 8 : configMAX_PRIORITIES - 3) static void rpdata_demo_usage(void) { printf("Usgae: rpdata_demo [option]\n"); printf("-h, rpdata help\n"); printf("-m, mode, 0-send; 1-recv; 2-recv+send\n"); printf("-t, type, type name\n"); printf("-n, name, id name\n"); printf(" (type + name) specify unique data xfer\n"); printf("-c, string, send string\n"); printf("-i, single test, do send or recv test once\n"); printf("-d, dir, remote processor, 1-cm33;2-c906;3-dsp\n"); printf("-s, src dir, valid in mode 2\n"); printf("\n"); printf("RV -> DSP\n"); printf("rpdata_demo -m 0 -d 3 -t RVtoDSP -n RVsendDSPrecv\n"); printf("rpccli dsp rpdata_demo -m 1 -d 2 -t RVtoDSP -n RVsendDSPrecv\n"); printf("\n"); printf("RV -> M33\n"); printf("rpdata_demo -m 0 -d 1 -t RVtoM33 -n RVsendM33recv\n"); printf("rpccli arm rpdata_demo -m 1 -d 2 -t RVtoM33 -n RVsendM33recv\n"); printf("\n"); printf("RV <- M33\n"); printf("rpdata_demo -m 1 -d 1 -t M33toRV -n RVrecvM33send\n"); printf("rpccli arm rpdata_demo -m 0 -d 2 -t M33toRV -n RVrecvM33send\n"); printf("\n"); printf("RV -> DSP -> M33\n"); printf("rpccli dsp rpdata_demo -d 2 -t RVtoDSP -n DSPrecvRVsend -s 1 -t DSPtoM33 -n M33recvDSPsend\n"); printf("rpccli arm rpdata_demo -m 1 -d 3 -t DSPtoM33 -n M33recvDSPsend\n"); printf("rpdata_demo -m 0 -d 3 -t RVtoDSP -n DSPrecvRVsend\n"); printf("\n"); printf("RV -> DSP -> M33 -> DSP -> RV\n"); printf("rpccli dsp rpdata_demo -d 2 -t RD -n rs -s 1 -t DM -n ds\n"); printf("rpccli arm rpdata_demo -d 3 -t DM -n ds -s 3 -t MD -n ms\n"); printf("rpccli dsp rpdata_demo -d 1 -t MD -n ms -s 2 -t DR -n ds\n"); printf("rpdata_demo -m 1 -d 3 -t DR -n ds\n"); printf("rpdata_demo -m 0 -d 3 -t RD -n rs\n"); printf("\n"); printf("RV->M33->RV process(M33 do aec process: input mic+ref, and output aec data to RV)\n"); printf("rpccli arm rpdata_demo -p -m 1 -d 2 -t ALGO -n AEC\n"); printf("rpdata_demo -p -m 0 -d 1 -t ALGO -n AEC\n"); printf("\n"); } struct rpdata_arg_test { char type[32]; char name[32]; int dir; char stype[32]; char sname[32]; int sdir; }; static int do_rpdata_send_test(struct rpdata_arg_test *targ, void *data, uint32_t len) { rpdata_t *rpd; void *buffer; int ret = -1; printf("Cteate %s:%s.\n", targ->type, targ->name); rpd = rpdata_create(targ->dir, targ->type, targ->name, len); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); return -1; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif buffer = rpdata_buffer_addr(rpd); if (!buffer) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } memcpy(buffer, data, len); rpdata_wait_connect(rpd); ret = rpdata_send(rpd, 0, len); if (ret != 0) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } exit: if (rpd) rpdata_destroy(rpd); return ret; } static int do_rpdata_recv_test(struct rpdata_arg_test *targ, void *data, uint32_t len) { rpdata_t *rpd; char *rx_buf; int ret = -1; rx_buf = hal_malloc(len + 1); if (rx_buf == NULL) { printf("[%s] line:%d alloc rx buffer fialed.\n", __func__, __LINE__); return -1; } printf("connect to %s:%s.\n", targ->type, targ->name); rpd = rpdata_connect(targ->dir, targ->type, targ->name); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); return -1; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif while (1) { ret = rpdata_recv(rpd, rx_buf, len, 10000); if (ret <= 0) { printf("rpdata recv timeout \n"); goto exit; } rx_buf[ret] = 0; printf("%s, len:%d\n", rx_buf, ret); if (!memcmp("quit", rx_buf, 4)) break; } exit: if (rx_buf) hal_free(rx_buf); if (rpd) rpdata_destroy(rpd); return ret; } static void data_fill(void *buffer, uint32_t len) { int i; int data_len = len - 16; memset(buffer, 0, len); for (i = 0; i < len;) { *(int *)(buffer + i) = rand(); i += sizeof(int); } md5(buffer, data_len, buffer + data_len); } static int data_check(void *buffer, uint32_t len) { unsigned char res[16]; int data_len = len - 16; md5(buffer, data_len, res); if (!memcmp(buffer + data_len, res, 16)) return 0; return -1; } static void rpdata_auto_send(void *arg) { struct rpdata_arg_test targ; rpdata_t *rpd; void *buffer; int ret = -1; uint32_t len = 512; memcpy(&targ, arg, sizeof(struct rpdata_arg_test)); printf("dir:%d, type:%s, name:%s\n", targ.dir, targ.type, targ.name); rpd = rpdata_create(targ.dir, targ.type, targ.name, 512); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif buffer = rpdata_buffer_addr(rpd); if (!buffer) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } rpdata_wait_connect(rpd); while (1) { data_fill(buffer, len); ret = rpdata_send(rpd, 0, len); if (ret != 0) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } hal_msleep(10); } exit: if (rpd) rpdata_destroy(rpd); printf("rpdata auto send test finish\n"); vTaskDelete(NULL); } static int rpd_demo_recv_cb(rpdata_t *rpd, void *data, uint32_t data_len) { static int count = 0; if (data_check(data, data_len) < 0) { printf("check md5 failed\n"); } if (!g_rpd_verbose) return 0; if (count++ % g_rpd_verbose == 0) printf("check md5 ok(print interval %d)\n", g_rpd_verbose); return 0; } struct rpdata_cbs rpd_demo_cbs = { .recv_cb = rpd_demo_recv_cb, }; static int rpd_demo_process_cb(rpdata_t *rpd, void *buffer, uint32_t data_len) { void *mic_data, *ref_data, *aec_data; uint32_t mic_offset = 128; uint32_t ref_offset = 128 + 640; uint32_t aec_offset = 128 + 640 + 320; uint32_t total_len = 1408; /* aec process * input: * params: * simulator: 128bytes * mic data: 2ch+16K+16bit, 10ms, 160*4=640 * ref data: 1ch+16K+16bit, 10ms, 160*2=320 * outout: * aec data: 1ch+16K+16bit, 10ms, 160*2=320 * * total= 128 + 640 + 320 + 320 = 1408 * 1408 is cacheline lenght */ mic_data = buffer + mic_offset; ref_data = buffer + ref_offset; aec_data = buffer + aec_offset; if (data_len != total_len) { printf("expected len:%d but:%d\n", total_len, data_len); return -1; } if (data_check(mic_data, ref_data - mic_data) < 0) { printf("check mic data md5 failed\n"); } if (data_check(ref_data, aec_data - ref_data) < 0) { printf("check ref data md5 failed\n"); } data_fill(aec_data, total_len - aec_offset); return 0; } struct rpdata_cbs rpd_demo_process_cbs = { .recv_cb = rpd_demo_process_cb, }; static int rpd_demo_recv_and_send_cb(rpdata_t *rpd, void *data, uint32_t data_len) { rpdata_t *rpd_send = NULL; void *buffer; int ret; if (data_check(data, data_len) < 0) { printf("[%s] line:%d check md5 failed\n", __func__, __LINE__); } rpd_send = rpdata_get_private_data(rpd); if (!rpd_send) return -1; buffer = rpdata_buffer_addr(rpd_send); memcpy(buffer, data, data_len); ret = rpdata_send(rpd_send, 0, data_len); if (ret != 0) { printf("rpdata_send failed\n"); return ret; } return 0; } struct rpdata_cbs rpd_demo_rs_cbs = { .recv_cb = rpd_demo_recv_and_send_cb, }; static void rpdata_auto_recv(void *arg) { struct rpdata_arg_test targ; rpdata_t *rpd; void *rx_buf = NULL; int len, ret; memcpy(&targ, arg, sizeof(struct rpdata_arg_test)); printf("dir:%d, type:%s, name:%s\n", targ.dir, targ.type, targ.name); rpd = rpdata_connect(targ.dir, targ.type, targ.name); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif len = rpdata_buffer_len(rpd); if (len <= 0) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } rx_buf = hal_malloc(len); if (!rx_buf) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifdef RECV_CALLBACK_TEST rpdata_set_recv_cb(rpd, &rpd_demo_cbs); while (1) { hal_msleep(10); } #else while (1) { ret = rpdata_recv(rpd, rx_buf, len, 10000); if (ret <= 0) { printf("rpdata recv timeout \n"); goto exit; } if (data_check(rx_buf, ret) < 0) { printf("check md5 failed\n"); } } #endif exit: if (rx_buf) hal_free(rx_buf); if (rpd) rpdata_destroy(rpd); printf("rpdata auto recv test finish\n"); vTaskDelete(NULL); } static void rpdata_auto_recv_and_send(void *arg) { struct rpdata_arg_test targ; rpdata_t *rpd_recv = NULL, *rpd_send = NULL; void *buf_recv = NULL, *buf_send = NULL; uint32_t len = 512; int ret; memcpy(&targ, arg, sizeof(struct rpdata_arg_test)); printf("recv dir:%d, type:%s, name:%s\n", targ.dir, targ.type, targ.name); printf("send dir:%d, type:%s, name:%s\n", targ.sdir, targ.stype, targ.sname); rpd_send = rpdata_create(targ.sdir, targ.stype, targ.sname, len); if (!rpd_send) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } buf_send = rpdata_buffer_addr(rpd_send); if (!buf_send) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } rpd_recv = rpdata_connect(targ.dir, targ.type, targ.name); if (!rpd_recv) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd_recv, 2 * rpdata_buffer_len(rpd_recv)); rpdata_set_recv_ringbuffer(rpd_send, 2 * rpdata_buffer_len(rpd_send)); #endif buf_recv = hal_malloc(len); if (!buf_recv) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } rpdata_wait_connect(rpd_send); #ifdef RECV_CALLBACK_TEST rpdata_set_private_data(rpd_recv, rpd_send); rpdata_set_recv_cb(rpd_recv, &rpd_demo_rs_cbs); while (1) { hal_msleep(10); } #else while (1) { ret = rpdata_recv(rpd_recv, buf_recv, len, 10000); if (ret <= 0) { printf("rpdata recv timeout \n"); goto exit; } if (data_check(buf_recv, ret) < 0) { printf("check md5 failed\n"); } memcpy(buf_send, buf_recv, ret); ret = rpdata_send(rpd_send, 0, ret); if (ret != 0) { printf("rpdata send failed\n"); goto exit; } } #endif exit: if (buf_recv) hal_free(buf_recv); if (rpd_send) rpdata_destroy(rpd_send); if (rpd_recv) rpdata_destroy(rpd_recv); printf("rpdata auto recv_and_send test finish\n"); vTaskDelete(NULL); } static void rpdata_process_send(void *arg) { struct rpdata_arg_test targ; rpdata_t *rpd; void *buffer; int ret = -1; uint32_t len; void *params, *mic_data, *ref_data, *aec_data; uint32_t params_offset = 0; uint32_t mic_offset = 128; uint32_t ref_offset = 128 + 640; uint32_t aec_offset = 128 + 640 + 320; /* aec process * input: * params: * simulator: 128bytes * mic data: 2ch+16K+16bit, 10ms, 160*4=640 * ref data: 1ch+16K+16bit, 10ms, 160*2=320 * outout: * aec data: 1ch+16K+16bit, 10ms, 160*2=320 * * total= 128 + 640 + 320 + 320 = 1408 * 1408 is cacheline lenght * */ len = 1408; memcpy(&targ, arg, sizeof(struct rpdata_arg_test)); printf("dir:%d, type:%s, name:%s\n", targ.dir, targ.type, targ.name); rpd = rpdata_connect(targ.dir, targ.type, targ.name); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif buffer = rpdata_buffer_addr(rpd); if (!buffer) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } params = buffer + params_offset; mic_data = buffer + mic_offset; ref_data = buffer + ref_offset; aec_data = buffer + aec_offset; rpdata_wait_connect(rpd); data_fill(params, mic_offset - params_offset); data_fill(mic_data, ref_offset - mic_offset); data_fill(ref_data, aec_offset - ref_offset); memset(aec_data, 0, len - aec_offset); ret = rpdata_process(rpd, 0, len); if (ret != 0) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } if (data_check(aec_data, len - aec_offset) < 0) { printf("aec data check failed\n"); } else { printf("aec data check ok\n"); } exit: if (rpd) rpdata_destroy(rpd); vTaskDelete(NULL); } static void rpdata_process_recv(void *arg) { struct rpdata_arg_test targ; rpdata_t *rpd; uint32_t len; void *rx_buf = NULL; int ret; /* aec process * input: * params: * simulator: 128bytes * mic data: 2ch+16K+16bit, 10ms, 160*4=640 * ref data: 1ch+16K+16bit, 10ms, 160*2=320 * outout: * aec data: 1ch+16K+16bit, 10ms, 160*2=320 * * total= 128 + 640 + 320 + 320 = 1408 * 1408 is cacheline lenght * */ len = 1408; memcpy(&targ, arg, sizeof(struct rpdata_arg_test)); printf("dir:%d, type:%s, name:%s\n", targ.dir, targ.type, targ.name); rpd = rpdata_create(targ.dir, targ.type, targ.name, len); if (!rpd) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } #ifndef RECV_CALLBACK_TEST rpdata_set_recv_ringbuffer(rpd, 2 * rpdata_buffer_len(rpd)); #endif #ifndef RECV_CALLBACK_TEST rx_buf = hal_malloc(rpdata_buffer_len(rpd)); if (!rx_buf) { printf("[%s] line:%d \n", __func__, __LINE__); goto exit; } ret = rpdata_recv(rpd, rx_buf, len, 30*1000); if (ret <= 0) { printf("[%s] : Timeout!\n", __func__); goto exit; } rpd_demo_process_cb(rpd, rx_buf, ret); #else rpdata_set_recv_cb(rpd , &rpd_demo_process_cbs); hal_sleep(30); #endif exit: if (rx_buf) hal_free(rx_buf); if (rpd) rpdata_destroy(rpd); printf("rpdata recv process finish\n"); vTaskDelete(NULL); } static int do_rpdata_process_test(struct rpdata_arg_test *targ, int mode) { hal_thread_t handle; if (mode == 0) handle = hal_thread_create(rpdata_process_send, targ, "rpd_send_process", 512, HAL_THREAD_PRIORITY_APP); else if (mode == 1) handle = hal_thread_create(rpdata_process_recv, targ, "rpd_recv_process", 512, HAL_THREAD_PRIORITY_APP); return 0; } static int do_rpdata_auto_test(struct rpdata_arg_test *targ, int mode) { hal_thread_t handle; if (mode == 0) handle = hal_thread_create(rpdata_auto_send, targ, "rpd_send_test", 512, HAL_THREAD_PRIORITY_APP); else if (mode == 1) handle = hal_thread_create(rpdata_auto_recv, targ, "rpd_recv_test", 512, HAL_THREAD_PRIORITY_APP); else if (mode == 2) handle = hal_thread_create(rpdata_auto_recv_and_send, targ, "rpd_rs_test", 512, HAL_THREAD_PRIORITY_APP); return 0; } static int check_dir(int dir) { switch (dir) { case RPDATA_DIR_CM33: case RPDATA_DIR_RV: case RPDATA_DIR_DSP: return 0; default: return -1; } } static int cmd_rpdata_demo(int argc, char *argv[]) { int c, mode = 2; int single_test = 0, process_test = 0; int get_sdir_arg = 0; /* string/data must be cache_line align */ char string[128] = "rpdata test string"; static struct rpdata_arg_test targ = { .type = "RVtoDSP", .name = "DSPrecvRVsend", .dir = RPDATA_DIR_DSP, .stype = "DSPtoM33", .sname = "M33recvDSPsend", .sdir = RPDATA_DIR_CM33, }; optind = 0; while ((c = getopt(argc, argv, "hm:t:n:c:s:d:iv:p")) != -1) { switch (c) { case 'm': mode = atoi(optarg); break; case 't': if (!get_sdir_arg) strncpy(targ.type, optarg, sizeof(targ.type)); else strncpy(targ.stype, optarg, sizeof(targ.stype)); break; case 'n': if (!get_sdir_arg) strncpy(targ.name, optarg, sizeof(targ.name)); else strncpy(targ.sname, optarg, sizeof(targ.sname)); break; case 'c': strncpy(string, optarg, sizeof(string)); break; case 's': targ.sdir = atoi(optarg); get_sdir_arg = 1; break; case 'd': targ.dir = atoi(optarg); get_sdir_arg = 0; break; case 'i': single_test = 1; break; case 'v': g_rpd_verbose = atoi(optarg); return 0; case 'p': process_test = 1; break; case 'h': default: goto usage; } } if (mode != 0 && mode != 1 && mode != 2) goto usage; if (check_dir(targ.dir) < 0 || check_dir(targ.sdir) < 0) goto usage; if (process_test) { do_rpdata_process_test(&targ, mode); return 0; } if (!single_test) { do_rpdata_auto_test(&targ, mode); return 0; } if (mode == 0) do_rpdata_send_test(&targ, string, sizeof(string)); else if (mode == 1) do_rpdata_recv_test(&targ, string, sizeof(string)); return 0; usage: rpdata_demo_usage(); return -1; } FINSH_FUNCTION_EXPORT_CMD(cmd_rpdata_demo, rpdata_demo, rpdata test demo);测试例子:
- rv/dsp之间的收发
rv接受,dsp发送
rpdata_demo ‑m 1 ‑d 3 ‑t DSPtoRV ‑n RVrecvDSPsend rpccli dsp rpdata_demo ‑m 0 ‑d 2 ‑t DSPtoRV ‑n RVrecvDSPsendrv发送,dsp接受
rpdata_demo ‑m 0 ‑d 3 ‑t RVtoDSP ‑n RVsendDSPrecv rpccli dsp rpdata_demo ‑m 1 ‑d 2 ‑t RVtoDSP ‑n RVsendDSPrecv- rv/m33之间收发
rv接受,m33发送
rpdata_demo ‑m 1 ‑d 1 ‑t M33toRV ‑n RVrecvM33send rpccli arm rpdata_demo ‑m 0 ‑d 2 ‑t M33toRV ‑n RVrecvM33sendrv发送,m33接受
rpdata_demo ‑m 0 ‑d 1 ‑t RVtoM33 ‑n RVsendM33recv rpccli arm rpdata_demo ‑m 1 ‑d 2 ‑t RVtoM33 ‑n RVsendM33recv- m33/dsp之间收发
m33接受,dsp发送
rpccli arm rpdata_demo ‑m 1 ‑d 3 ‑t DSPtoM33 ‑n M33recvDSPsend rpccli dsp rpdata_demo ‑m 0 ‑d 1 ‑t DSPtoM33 ‑n M33recvDSPsenddsp接受,m33发送
rpccli dsp rpdata_demo ‑m 1 ‑d 1 ‑t M33toDSP ‑n DSPrecvM33send rpccli arm rpdata_demo ‑m 0 ‑d 3 ‑t M33toDSP ‑n DSPrecvM33send另外,提供了 rpd 命令用于查看 rpdata 的运行情况:
c906>rpd ‑l ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ RPdata RV <‑‑> CM33 id type+name state ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ RPdata RV <‑‑> DSP id type+name state 0x01 DSPtoRV 0x01 └─── RVrecvDSPsend CNXN c906>rpccli dsp rpd ‑l ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ RPdata DSP <‑‑> CM33 id type+name state ‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑‑ RPdata DSP <‑‑> RV id type+name state 0x01 DSPtoRV 0x01 └─── RVrecvDSPsend CNXN
-
【R128】软件配置——配置引脚复用发布在 A Series
配置引脚复用
本文中的约定
- 描述 GPIO 配置的形式:
Port:端口 + 组内序号<功能分配><内部电阻状态><驱动能力><输出电平状态> - 文中的
<X>=0,1,2,3,4,5…..,如 twi0,twi1….;uart0,uart1….。 - 文中的
{PROJECT}代表不同的方案,例如module方案。
引脚配置文件配置复用
R128 平台使用
sys_config.fex作为引脚配置文件,他会在打包时打包编译进入系统,在系统运行时会解析并配置,系统解析sys_config.fex的驱动配置位于lichee\rtos-components\aw\sys_config_script中。对于配置引脚复用,只需要修改
board\r128s2\{PROJECT}\config\sys_config.fex文件即可。GPIO描述格式
Port:端口 + 组内序号<功能分配><内部电阻状态><驱动能力><输出电平状态>示例
uart_tx = port:PA16<5><1><2><0> |----------------------> 端口号 PA |--------------------> 序号 19 |------------------> 功能分配 5 (参考 PINMUX) |---------------> 内部电阻状态为 1 |------------> 驱动能力为 2 |---------> 默认输出电平 0[product]
配置文件信息
配置项 配置项含义 version 配置的版本号 machine 方案名字 示例
[product] version = "100" machine = "module"[target]
启动介质配置
配置项 配置项含义 storage_type 启动介质选择 <br />0:nand <br />1:sd<br />2:emmc<br />3:spinor <br />4:emmc <br />5:spinand <br />6:sd <br />-1:(defualt) 自动扫描启动介质 示例
[target] storage_type = 3对于内置 SPI NOR 的 R128 平台,请配置为
3[platform]
配置 boot0 调试信息打印
配置项 配置项含义 debug_mode 配置0时,boot0 不打印调试信息,配置不为0时打印 示例
[platform] debug_mode = 2[uart_para]
boot0 调试串口配置
配置项 配置项含义 uart_debug_port boot0 调试输出串口使用的串口号 uart_debug_tx boot0 调试串口 tx 使用的引脚 uart_debug_rx boot0 调试串口 rx 使用的引脚 示例
[uart_para] uart_debug_port = 0 uart_debug_tx = port:PA16<5><1><default><default> uart_debug_rx = port:PA17<5><1><default><default>[uartX]
UART 引脚配置
配置项 配置项含义 uart_tx UART TX 的 GPIO 配置 uart_rx UART RX 的 GPIO 配置 uart_type UART 类型,有效值为:2/4/8; 表示 2/4/8 线模式 示例
[uart0] uart_tx = port:PA16<5><1><default><default> uart_rx = port:PA17<5><1><default><default>[twiX]
TWI 引脚配置
配置项 配置项含义 twiX_sck TWI 的时钟的 GPIO 配置 twiX_sda TWI 的数据的 GPIO 配置 [sdcX]
SDIO,MMC 引脚配置
配置项 配置项含义 card_ctrl 控制器 card_high_speed 速度模式 0 为低速,1 为高速 card_line 1,4 线卡可以选择 sdc_d1 sdc 卡数据 1 线信号的 GPIO 配置 sdc_d0 sdc 卡数据 2 线信号的 GPIO 配置 sdc_clk sdc 卡时钟信号的 GPIO 配置 sdc_cmd sdc 命令信号的 GPIO 配置 sdc_d3 sdc 卡数据 3 线信号的 GPIO 配置 sdc_d2 sdc 卡数据 4 线信号的 GPIO 配置 示例
[sdc0] card_ctrl = 0 card_high_speed = 0 card_line = 4 sdc_d1 = port:PA27<2><1><3><default> sdc_d0 = port:PA26<2><1><3><default> sdc_clk = port:PA29<2><1><3><default> sdc_cmd = port:PA25<2><1><3><default> sdc_d3 = port:PA24<2><1><3><default> sdc_d2 = port:PA28<2><1><3><default>[sdcXdet_para]
卡检测引脚配置
配置项 配置项含义 sdcX_det 卡插入检测脚 示例
[sdc0det_para] sdc0_det = port:PA23<0><1><3><default>[usbX]
USB 配置
配置项 配置项含义 usb_used USB使能标志。置1,表示系统中USB模块可用,置0,则表示系统USB禁用。 usb_port_type USB端口的使用情况。 0: device only;1: host only;2: OTG usb_detect_type USB端口的检查方式。0: 不做检测;1: vbus/id检查;2: id/dpdm检查 usb_detect_mode USB端口的检查方式。0: 线程轮询;1: id中断触发 usb_id_gpio USB ID pin脚配置 usb_det_vbus_gpio USB DET_VBUS pin脚配置 usb_drv_vbus_type vbus设置方式。0: 无; 1: gpio; 2: axp。 usb_det_vbus_gpio "axp_ctrl",表示 axp 提供。 usbh_driver_level usb驱动能力等级 usbh_irq_flag usb中断标志 示例
[usbc0] usb_used = 1 usb_port_type = 2 usb_detect_type = 1 usb_detect_mode = 0 usb_id_gpio = port:PB04<0><0><default><default> usb_det_vbus_gpio = port:PA24<0><0><default><default> usb_drv_vbus_gpio = port:PA29<0><0><default><default> usb_drv_vbus_type = 1 usbh_driver_level = 5 usbh_irq_flag = 0[audiocodec]
内置 audiocodec 配置
配置项 配置项含义 dacl_vol DAC L 音量 dacr_vol DAC R 音量 lineout_vol LINEOUT 音量 lineoutl_en LINEOUTL 使能 lineoutr_en LINEOUTR 使能 mic1_gain MIC1 增益 mic2_gain MIC2 增益 mic3_gain MIC3 增益 mic1_en MIC1 启用 mic2_en MIC2 启用 mic3_en MIC3 启用 mad_bind_en MAD 模块绑定 pa_pin_msleep 功放使能引脚延时 pa_pin 功放使能引脚 示例
[audiocodec] dacl_vol = 129 dacr_vol = 129 lineout_vol = 5 lineoutl_en = 1 lineoutr_en = 0 mic1_gain = 19 mic2_gain = 19 mic3_gain = 0 mic1_en = 1 mic2_en = 1 mic3_en = 1 mad_bind_en = 0 pa_pin_msleep = 10 pa_pin = port:PB3<1><default><1><1>[daudio0]
数字音频配置
配置项 配置项含义 i2s_mclk I2S MCLK 引脚配置 i2s_bclk I2S BCLK 引脚配置 i2s_lrck I2S LRCK 引脚配置 i2s_dout0 I2S DOUT0 引脚配置 i2s_din0 I2S DIN0 引脚配置 示例
[daudio0] i2s_mclk = port:PA23<2><0><1><default> i2s_bclk = port:PA20<2><0><1><default> i2s_lrck = port:PA19<2><0><1><default> i2s_dout0 = port:PA22<2><0><1><default> i2s_din0 = port:PA21<2><0><1><default>[dram_para]
此项配置仅为兼容配置,实际有用配置项为
dram_clk,dram_no_lpsram,其余dram_para参数没有实际意义。配置项 配置项含义 dram_clk 如果不为 0,初始化 hspsram dram_no_lpsram 如果为 0,初始化 lspsram [dram_para] dram_clk = 800 dram_type = 0xB dram_zq = 0x3dbdfda0 dram_odt_en = 0x1 dram_para1 = 0x000010f2 dram_para2 = 0x02000000 dram_mr0 = 0x1c70 dram_mr1 = 0x42 dram_mr2 = 0x8 dram_mr3 = 0x0 dram_tpr0 = 0x004A2195 dram_tpr1 = 0x02423190 dram_tpr2 = 0x0008B061 dram_tpr3 = 0xB4787896 dram_tpr4 = 0x0 dram_tpr5 = 0x48484848 dram_tpr6 = 0x48 dram_tpr7 = 0x1 dram_tpr8 = 0x0 dram_tpr9 = 0x00 dram_tpr10 = 0x0 dram_tpr11 = 0x00000000 dram_tpr12 = 0x00000000 dram_tpr13 = 0x34050f00 dram_no_lpsram = 0x0[lcd_fb0]
SPI LCD 配置
SPI LCD 配置项目较多,部分详细描述可以参照 显示框架
配置项 配置项含义 lcd_used 启用 LCD lcd_model_name lcd 屏模型名字,非必须,可以用于同个屏驱动中进一步区分不同屏。 lcd_driver_name lcd面板驱动名称,必须与屏驱动中 strcut __lcd_panel变量的name成员一致。lcd_x lcd X像素 lcd_y lcd Y像素 lcd_width lcd 物理宽度(单位mm) lcd_height lcd 物理高度(单位mm) lcd_data_speed lcd 数据速率 lcd_pwm_used lcd 背光使用 pwm lcd_pwm_ch lcd 背光使用的 pwm 通道 lcd_pwm_freq lcd 背光使用的频率 lcd_pwm_pol lcd 背光使用的相位 lcd_if 0:SPI接口(spi 接口就是俗称的 4 线模式,这是因为发送数据时需要额外借助 DC 线来区分命令和数据,与sclk,cs 和 sda 共四线)<br />1:DBI接口(如果设置了 dbi 接口,那么还需要进一步区分 dbi 接口,需要设置lcd_dbi_if) lcd_pixel_fmt 选择传输数据的像素格式 lcd_dbi_fmt 0:RGB111<br />1:RGB444<br />2:RGB565<br />3:RGB666<br />4:RGB888 lcd_dbi_clk_mode 选择 dbi 时钟的行为模式 lcd_dbi_te 使能 te 触发 fb_buffer_num 显示 framebuffer 数量,为了平滑显示,这里一般是 2 个,为了省内存也可以改成 1。 lcd_dbi_if 0:L3I1<br />1:L3I2<br />2:L4I1<br />3:L4I2<br />4:D2L1 lcd_rgb_order 输入图像数据 rgb 顺序识别设置 lcd_fps 设置屏的刷新率,单位 Hz lcd_spi_bus_num 选择 spi 总线 id lcd_frm frm抖动控制 lcd_gamma_en gamma控制使能 lcd_backlight 背光 lcd_gpio_0 用户定义IO定义,一般作为RST
- 描述 GPIO 配置的形式:
-
【R128】基础组件开发指南——RTOS 多媒体编码发布在 A Series
RTOS 多媒体编码
介绍 FreeRTOS 下如何使用 xrecorder 的接口来开发录制应用程序,方便录制应用开发人员快速正确地开发,以及录制应用测试人员如何根据该文档对基于 xrecord 的录制应用进行验证测试。
编码支持情况
目前 RTOS 平台多媒体编码应用支持的编码格式分别为:pcm、amr、mp3、speex、opus。
其中 pcm、amr、mp3 可通过 xrecorder 进行编码以及录制;speex 和 opus 可通过第三方示例工程进行编码。
xrecorder 状态图
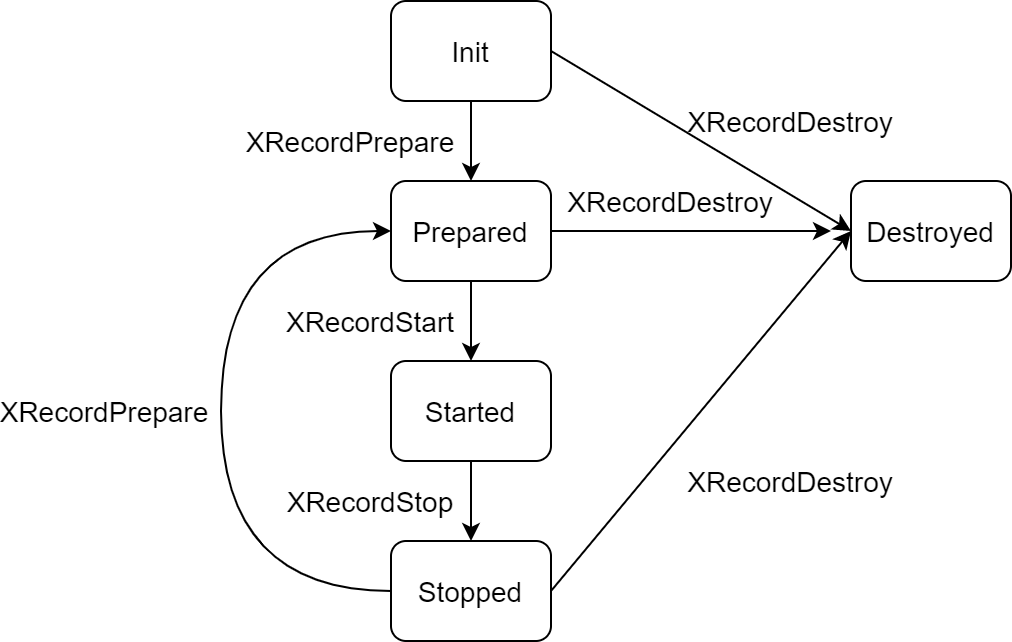
这张状态转换图清晰地描述了 xrecorder 的各个状态,也列举了主要的方法的调用时序,每种方法只能在一些特定的状态下使用,否则会出错。
Init 状态
Idle 状态:当调用 XRecordCreate() 创建一个 xrecord 时,处于 idle 状态。
Prepared 状态
调用 XRecordPrepare() 函数并返回后,xrecorder 处于 Prepared 状态。在这个状态下说明所有的资源都已经就绪了,调用 XRecordStart() 函数就可以进行录制。
Started 状态
xrecorder prepare 完成后,调用 XRecordStart() 进行录制,当应用开始录制后,xrecorder 就处于 Started 状态,这表明 xrecorder 正在录制文件。
Stopped 状态
Started 状态下均可调用 XrecordStop() 停止 xrecorder,而处于 Stop 状态的 xrecorder 要想重新录制,需要通过 XRecorderPrepare() 回到先前的 Prepared 状态重新开始才可以。
Destroyed 状态
通过 XRecordDestroy() 的方法可以进入 Destroyed 状态,只要 xrecorder 不再被使用,就应当尽快将其 destroy 掉。
接口函数
创建一个 XRecord
XRecord *XRecordCreate()参数:
- 无
返回值:
- 无
设置录制音频的编码格式
int XRecordSetAudioEncodeType(XRecord *p, XRECODER_AUDIO_ENCODE_TYPE type, XRecordConfig *config)参数:
- p: 通过 XRecordCreate 创建的 XRecord 指针
- type: 已支持的编码格式
- config: 上层应用对音频属性的配置
返回值:
- 成功: 0; 失败: ‑1
获取指针
获取指向音频设备管理模块的指针,用于录制音频
void XRecordSetAudioCap(XRecord* p, const CaptureCtrl* audioSrc)参数:
- p: 通过 XRecordCreate 创建的 XRecord 指针
- audioSrc: 由上层应用获取的音频设备管理模块的指针
返回值:
- 无
audioSrc 可在上层应用通过调用 cedarx 的音频设备管理模块的 RTCaptureDeviceCreate 来创建。
设置录制后文件的保存的路径
int XRecordSetDataDstUrl(XRecord* p, const char* pUrl, void* arg, const CdxKeyedVectorT* pHeaders)参数:
- p: 通过 XRecordCreate 创建的 XRecord 指针
- pUrl:url 地址
返回值:
- 成功:0;失败:‑1
将 XRecord 置为准备状态, 准备 Muxer
int XRecordPrepare(XRecord* p)参数:
- p:通过 XRecordCreate 创建的 XRecord 指针
返回值:
- 成功:0;失败:‑1
将 XRecord 置为启动状态
int XRecordStart(XRecord* p)参数:
- p:通过 XRecordCreate 创建的 XRecord 指针
返回值:
- 成功:0;失败:‑1
将 XRecord 置为停止状态
int XRecordStop(XRecord* p)参数:
- p:通过 XRecordCreate 创建的 XRecord 指针
返回值:
- 成功: 0;失败:‑1
编码数据入队封装
提供接口给下层编码模块,将编码数据放进缓存队列中等待封装
int onAudioDataEnc(XRecord* app, CdxMuxerPacketT* buff)参数:
- app: xrecorder 的环境句柄;
- buff:编码后的缓存数据
返回值:
- 成功: 0;失败:‑1
销毁一个 XRecord
int XRecordDestroy(XRecord* p)参数:
- p:通过 XRecordCreate 创建的 XRecord 指针
返回值:
- 成功: 0;失败:‑1
XRecorder 开发流程
XRecordCreate()//创建一个录制应用XRecordSetAudioCap()//设置音频采集设备;可先调用RTCaptureDeviceCreate创建。XRecordSetDataDstUrl()//设置录制后文件保存位置XRecordSetAudioEncodeType()//设置音频数据的编码格式XRecordPrepare()//设置 Muxer,让 xrecorder 进入准备状态XRecordStart()//开始录制XRecordStop()//停止录制XRecordDestroy()//当不需要进行录制的时候,销毁 xrecorder
注意事项
- 在调用 XRecordSetAudioCap 设置音频采集设备之前,需先打开音频采集设备来获取句柄。在 rtos 平台可调用 libcedarx 提供的音频采集设备控制模块 rtosCaptureControl.c 中的
RTCaptureDeviceCreate来创建句柄。 - recorder 应用未支持暂停录制。
- recorder 的录制时长为调用 XRecordStart 至调用 XRecordStop 之间的时长来决定,因此上层应用需要录制指定时长的音频时,录制的步骤应为调用 XRecordStart,等待指定的时间,调用XRecordStop。
示例代码
#include <stdio.h> #include <stdlib.h> #include <stdbool.h> #include <string.h> #include <aw_common.h> #include <console.h> #include "vfs.h" #include "xrecord.h" #define RECORDER_LOGD(msg, arg...) printf("[RECORDER_DBG] <%s : %d> " msg "\n", __func__, __LINE__, ##arg) #define RECORDER_LOGI(msg, arg...) printf("[RECORDER_INFO] <%s : %d> " msg "\n", __func__, __LINE__, ##arg) #define RECORDER_LOGW(msg, arg...) printf("[RECORDER_WRN] <%s : %d> " msg "\n", __func__, __LINE__, ##arg) #define RECORDER_LOGE(msg, arg...) printf("[RECORDER_ERR] <%s : %d> " msg "\n", __func__, __LINE__, ##arg) typedef struct recorder_base recorder_base; typedef struct rec_cfg { XRECODER_AUDIO_ENCODE_TYPE type; int sample_rate; int chan_num; int bitrate; int sampler_bits; } rec_cfg; struct recorder_base { int (*start)(recorder_base *base, const char *url, const rec_cfg *cfg); int (*stop)(recorder_base *base); }; struct ExampleCustomerWriterImpl { CdxWriterT base; vfs_file_t *vfs; }; typedef struct recorder { recorder_base base; XRecord *xrecorder; CaptureCtrl *cap; } recorder; recorder_base *recorder_create(); int recorder_destroy(recorder_base *base); /* Example Customer Writer */ static int __CdxExampleConnect(CdxWriterT *writer) { struct ExampleCustomerWriterImpl *impl; impl = (struct ExampleCustomerWriterImpl *)writer; vfs_unlink("data/record/2.amr"); impl->vfs = vfs_open("data/record/2.amr", VFS_RDWR | VFS_CREAT); if (impl->vfs == NULL) { return -1; } return 0; } static int __CdxExampleRead(CdxWriterT *writer, void *buf, int size) { return 0; } static int __CdxExampleWrite(CdxWriterT *writer, void *buf, int size) { uint32_t write_len; struct ExampleCustomerWriterImpl *impl; impl = (struct ExampleCustomerWriterImpl *)writer; write_len = vfs_write(impl->vfs, buf, size); return write_len; } static long __CdxExampleSeek(CdxWriterT *writer, long moffset, int mwhere) { return 0; } static long __CdxExampleTell(CdxWriterT *writer) { return 0; } static int __CdxExampleClose(CdxWriterT *writer) { struct ExampleCustomerWriterImpl *impl; impl = (struct ExampleCustomerWriterImpl *)writer; vfs_close(impl->vfs); free(impl); return 0; } static const struct CdxWriterOps exampleCustomerWriteOps = { .cdxConnect = __CdxExampleConnect, .cdxRead = __CdxExampleRead, .cdxWrite = __CdxExampleWrite, .cdxSeek = __CdxExampleSeek, .cdxTell = __CdxExampleTell, .cdxClose = __CdxExampleClose }; CdxWriterT *ExampleCustomerWriterCreat() { struct ExampleCustomerWriterImpl *impl; impl = malloc(sizeof(*impl)); if (impl == NULL) { printf("example customer writer create fail.\n"); return NULL; } memset(impl, 0, sizeof(*impl)); impl->base.ops = &exampleCustomerWriteOps; return &impl->base; } /* Main App */ static void showHelp(){ printf("\n"); printf("**************************\n"); printf("* This is a simple audio recoder, when it is started, you can input commands to tell\n"); printf("* what you want it to do.\n"); printf("* Usage: \n"); printf("* cedarx_record amr 10 : this means record 10s amr music\n"); printf("* cedarx_record pcm 10 : this means record 10s pcm music\n"); printf("**************************\n"); } recorder *recorder_singleton = NULL; static int record_start(recorder_base *base, const char *url, const rec_cfg *cfg) { recorder *impl = container_of(base, recorder, base); XRecordConfig audioConfig; if (cfg->type == XRECODER_AUDIO_ENCODE_PCM_TYPE) { audioConfig.nChan = cfg->chan_num; audioConfig.nSamplerate = cfg->sample_rate; audioConfig.nSamplerBits = cfg->sampler_bits; audioConfig.nBitrate = cfg->bitrate; } else if (cfg->type == XRECODER_AUDIO_ENCODE_AMR_TYPE) { audioConfig.nChan = 1; audioConfig.nSamplerate = 8000;//amr-nb 8000Hz amr-wb 16000Hz audioConfig.nSamplerBits = 16; audioConfig.nBitrate = 12200;//amr-nb 12200 amr-wb 23850 } else { audioConfig.nChan = cfg->chan_num; audioConfig.nSamplerate = cfg->sample_rate; audioConfig.nSamplerBits = cfg->sampler_bits; audioConfig.nBitrate = cfg->bitrate; } XRecordSetDataDstUrl(impl->xrecorder, url, NULL, NULL); XRecordSetAudioEncodeType(impl->xrecorder, cfg->type, &audioConfig); XRecordPrepare(impl->xrecorder); XRecordStart(impl->xrecorder); RECORDER_LOGI("record start"); return 0; } static int record_stop(recorder_base *base) { recorder *impl = container_of(base, recorder, base); XRecordStop(impl->xrecorder); return 0; } extern CaptureCtrl* RTCaptureDeviceCreate(); recorder_base *recorder_create() { if (recorder_singleton != NULL) return &recorder_singleton->base; recorder *impl = malloc(sizeof(*impl)); if (impl == NULL) return NULL; memset(impl, 0, sizeof(*impl)); impl->xrecorder = XRecordCreate(); if (impl->xrecorder == NULL) goto failed; impl->cap = (void *)(uintptr_t)RTCaptureDeviceCreate(); if (impl->cap == NULL) goto failed; XRecordSetAudioCap(impl->xrecorder, impl->cap); impl->base.start = record_start; impl->base.stop = record_stop; recorder_singleton = impl; return &impl->base; failed: RECORDER_LOGE("recorder create failed"); if (impl->xrecorder) XRecordDestroy(impl->xrecorder); if (impl) free(impl); return NULL; } int recorder_destroy(recorder_base *base) { recorder *impl = container_of(base, recorder, base); if (impl->xrecorder) { XRecordDestroy(impl->xrecorder); } free(impl); recorder_singleton = NULL; return 0; } static int cedarx_record_test(int argc, char **argv) { recorder_base *recorder; rec_cfg cfg; char music_url[64]; char file_url[64]; CdxWriterT *writer; memset(file_url, 0, 64); if(argc == 3){ if( !strncmp("amr", argv[1], sizeof("amr")-1) ){ cfg.type = XRECODER_AUDIO_ENCODE_AMR_TYPE; snprintf(file_url, 64, "file://data/%ds.amr", atoi(argv[2])); cfg.sample_rate = 8000;//8000 cfg.chan_num = 1;//1 cfg.bitrate = 12200; cfg.sampler_bits = 16; } else if( !strncmp("pcm", argv[1], sizeof("pcm")-1) ){ cfg.type = XRECODER_AUDIO_ENCODE_PCM_TYPE; snprintf(file_url, 64, "file://data/%ds.pcm", atoi(argv[2])); cfg.sample_rate = 8000;//8000 cfg.chan_num = 1;//1 cfg.bitrate = 12200; cfg.sampler_bits = 16; } else if( !strncmp("mp3", argv[1], sizeof("mp3")-1) ){ cfg.type = XRECODER_AUDIO_ENCODE_MP3_TYPE; snprintf(file_url, 64, "file://data/%ds.mp3", atoi(argv[2])); cfg.sample_rate = 16000; cfg.chan_num = 1; cfg.bitrate = 32000; cfg.sampler_bits = 16; } else { printf("now support!\n"); return -1; } }else{ printf("the parameter is error,usage is as following:\n"); showHelp(); return -1; } recorder = recorder_create(); if (recorder == NULL) { printf("recorder create fail, exit\n"); return -1; } printf("===start record %s now, last for %d s===\n", argv[1], atoi(argv[2])); recorder->start(recorder, file_url, &cfg); sleep(atoi(argv[2])); recorder->stop(recorder); printf("record %s over.\n", argv[1]); exit: return recorder_destroy(recorder); } FINSH_FUNCTION_EXPORT_CMD(cedarx_record_test, cedarx_record, cedarx record test demo);
-
【R128】基础组件开发指南——音频框架①发布在 A Series
基于R128-S2设计的全套开发板已上线淘宝百问网韦东山老师个人店进行售卖,包含黑色的DshanMCU-R128s2-R16N16模组和全套的DshanMCU-R128s2-DEVKIT。
- DshanMCU-R128s2-R16N16模组:39.9元
- DshanMCU-R128s2-DEVKIT开发板:59.9元
R128开发板购买链接:https://item.taobao.com/item.htm?spm=a21n57.1.0.0.46b0523cMfarLo&id=736154682975&ns=1&abbucket=5#detail
音频框架
简介
本文档基于 RTOS 平台基础音频框架介绍,能够让使用者在 RTOS 平台开发使用音频驱动,内容分四大部分。
- 音频时钟树-> 驱动特性-> 音频流通路->sys_config 配置-> 编译配置-> 声卡控件介绍->常见使用方法 等部分,介绍音频驱动的测试验证和使用;
- 源码结构-> 驱动框架-> 关键数据结构-> 接口说明 等部分,介绍音频驱动的二次开发;
- 声卡查看-> 声卡测试工具-> 外挂 CODEC 等部分,介绍声卡模块的测试验证和使用;
- FAQ”章节:调试方法及常见问题汇总。
模块介绍
在 sunxi 平台中,从软件上通常存在5 类音频设备,如下:
- AudioCodec
- I2S/PCM
- AHUB
- DMIC
- S/PDIF
以上每一类音频设备均适配ASoC 架构。
对于 R128 平台,具有以下音频接口资源
- AudioCodec x1
- I2S/PCM x1
- S/PDIF x1
- DMIC x1
另外还具有 MAD 模块,用于语音能量检测,非接口类型。
驱动框架
RTOS 上面的音频驱动框架与 Linux 上 ASoC 框架的思想比较类似,分为 codec,platform 模型,core 核心层实现具体的 codec 驱动加载、platform 驱动的选择、数据的搬运、dma 指针的更新等,能够将 codec 驱动与 SoC CPU 解耦合, 方便添加外挂 codec。
音频驱动的大致框架如下:
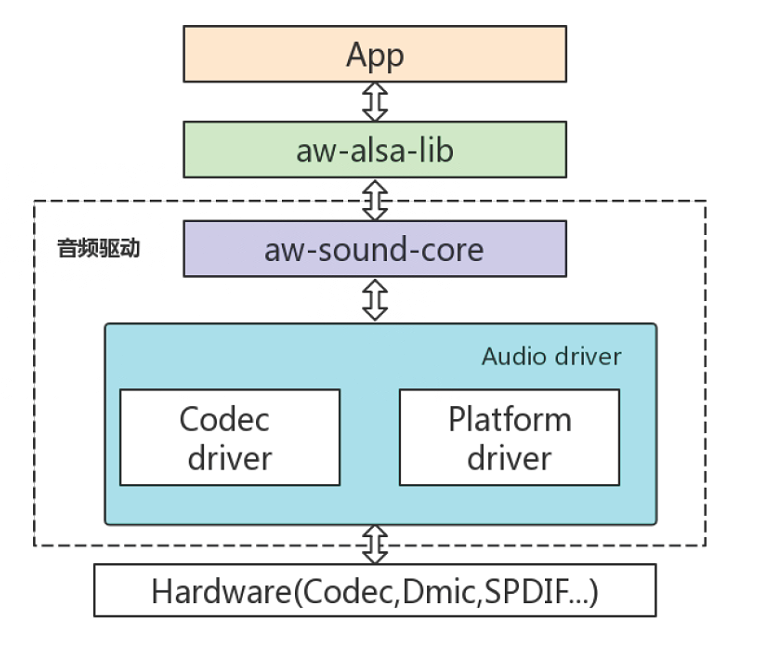
音频时钟树
R128 音频模块时钟源有4 个系列,分别为24.576MHz、22.5792MHz、8.192MHz 以及高频时钟。
- 24.576MHz、22.5792MHz 用于 Audiocodec、I2S/PCM 的播放和录音,S/PDIF 的播放,DMIC 的录音;
- 8.192MHz 用于系统休眠时供 Audiocodec、DMIC 录音,以及 mad 模块;
- 高频时钟用于 S/PDIF 的录音,以及 I2S/PCM 的 ASRC 模块;
时钟树如下图所示:
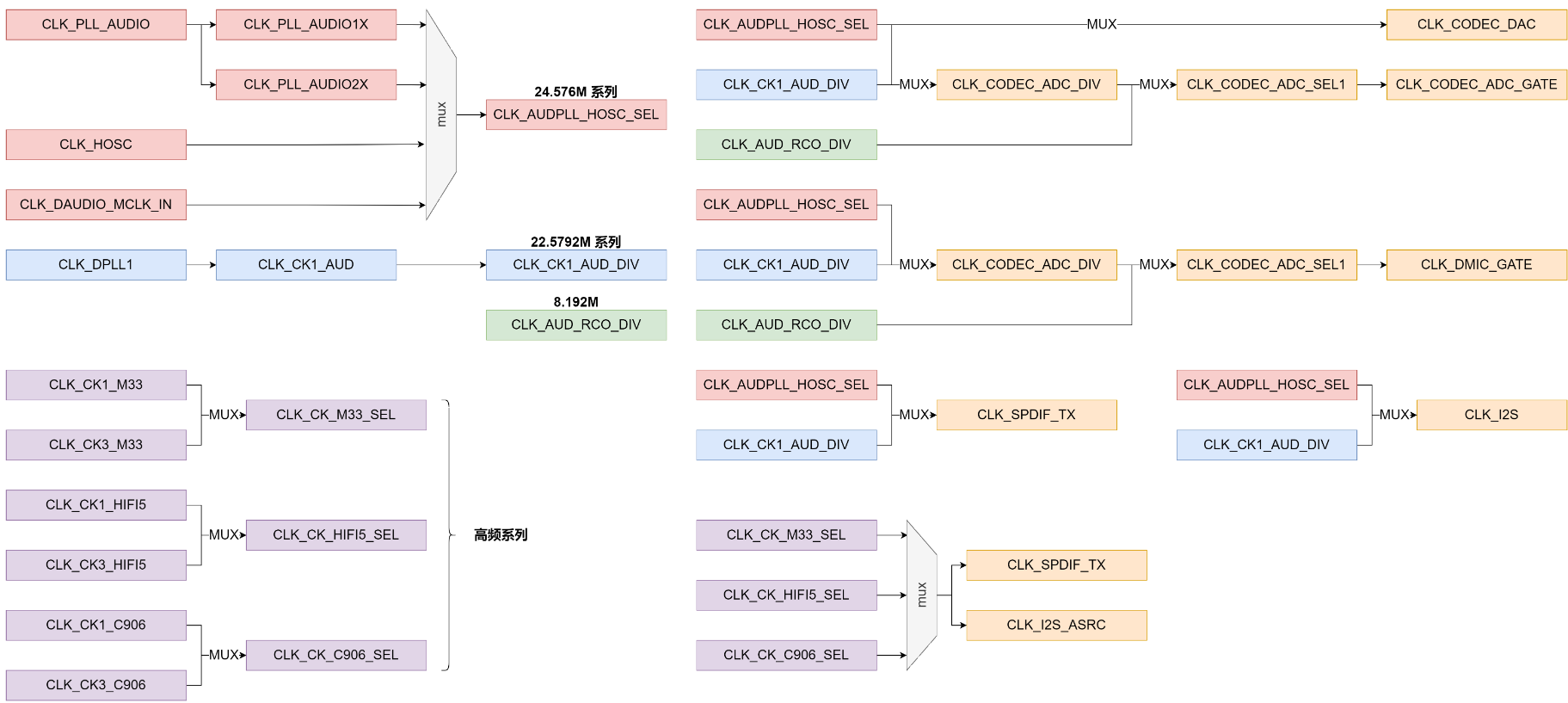
驱动特性
- 支持多种采样率格式
- 播放:8~384kHz
- 录音:8~96kHz
- 支持多通道播放和录音
- 播放:1~2
- 录音:1~3
- 支持16/24/32bit 数据精度(硬件支持16/24bit)
- 支持硬件HPF、DRC、EQ 算法
- 支持的物理接口
- INPUT : MIC
- OUTPUT: LINEOUT
- MIC, LINEOUT 支持差分和单端模式
- 支持同时playback 和capture (全双工模式)
音频通路
- 播放流
graph TD; Playback-->DACL; Playback-->DACR; DACL-->LINEOUTL-Output-Select; LINEOUTL-Output-Select-->LINEOUTL; DACR-->LINEOUTR-Output-Select; LINEOUTR-Output-Select-->LINEOUTR; LINEOUTL-->LINEOUT; LINEOUTR-->LINEOUT;- 录音流
graph TD; MIC1-->MIC1-Input-Select-->ADC1-->Capture; MIC2-->MIC2-Input-Select-->ADC2-->Capture; MIC3-->MIC3-Input-Select-->ADC3-->Capture;驱动配置
驱动配置在 menuconfig 中在下列位置
Drivers Options ---> soc related device drivers ---> SOUND Devices ---> [*] Sound card support AllWinner CODEC drivers ---> [*] Allwinner AudioCodec support Allwinner AudioCodec Choose ---> [*] Allwinner AudioCodec DAC Support [*] Allwinner AudioCodec ADC Support其中
Allwinner AudioCodec DAC Support是 DAC 模块,Allwinner AudioCodec ADC Support是 ADC 模块。参数配置如下:
[audiocodec] dacl_vol = 129 //dac左声道硬件数字音量 dacr_vol = 129 //dac右声道硬件数字音量 lineout_vol = 5 //lineout硬件数字音量 lineoutl_en = 1 //lineout左声道使能 lineoutr_en = 0 //lineout右声道禁用 adc1_vol = 129 //adc1硬件数字音量 adc2_vol = 129 //adc2硬件数字音量 adc3_vol = 129 //adc3硬件数字音量 mic1_gain = 19 //mic1硬件增益 mic2_gain = 19 //mic2硬件增益 mic3_gain = 0 //mic3硬件增益 mic1_en = 1 //mic1使能 mic2_en = 1 //mic2使能 mic3_en = 1 //mic3使能 mad_bind_en = 0 //mad禁用 pa_pin_msleep = 10 //pa开启延时 pa_pin = port:PB3<1><default><1><1> //pa引脚配置 capture_cma = 30720 //录音最大缓存配置声卡控件
声卡控件可以通过
AudioCodec-DAC命令查看。# AudioCodec-DAC Card Name:audiocodecdac. numid=0, name='DACL dig volume' value=129, min=0, max=255 numid=1, name='DACR dig volume' value=129, min=0, max=255 numid=2, name='LINEOUTL switch' value=on, enum=off on numid=3, name='LINEOUTR switch' value=on, enum=off on # AudioCodec-ADC Card Name:audiocodecadc. numid=0, name='bind mad function' value=unbound, enum=unbound mad_bind numid=1, name='lpsd channel sel function' value=0th_chan, enum=0th_chan 1st_chan 2nd_chan 3rd_chan 4th_chan 5th_chan 6 th_chan 7th_chan numid=2, name='mad standby channel sel function' value=Zero_Chan, enum=Zero_Chan Two_Chan Three_Chan Four_Chan numid=3, name='mad standby control' value=RESUME, enum=RESUME SUSPEND numid=4, name='MIC1 volume' value=31, min=0, max=31 numid=5, name='MIC2 volume' value=31, min=0, max=31 numid=6, name='MIC3 volume' value=31, min=0, max=31 numid=7, name='MIC1 switch' value=on, enum=off on numid=8, name='MIC2 switch' value=on, enum=off on numid=9, name='MIC3 switch' value=on, enum=off on控件名称与功能如下表所示:
控件名称 功能 数值 DACL dig volume DACL 数字音量调节 0->255 (-64->63dB) DACR dig volume DACR 数字音量调节 0->255 (-64->63dB) MIC1 volume MIC1 增益调节 0->31 (0,6,6,6,9->36dB) MIC2 volume MIC2 增益调节 0->31 (0,6,6,6,9->36dB) MIC3 volume MIC3 增益调节 0->31 (0,6,6,6,9->36dB) LINEOUTL switch LINEOUTL 输出开关 off;on LINEOUTR switch LINEOUTR 输出开关 off;on MIC1 switch MIC1 输入开关 off;on MIC2 switch MIC2 输入开关 off;on MIC3 switch MIC3 输入开关 off;on 使用方法
假设 AudioCodec-DAC 声卡序号为 0,AudioCodec-ADC 声卡序号为 1。
录音
用 MIC1 录音,并将数据保存在 /data/test.wav 文件
# 打开 MIC1 switch ~# amixer -c 1 set 7 1 Card Name: audiocodecadc. numid=7, name='MIC1 switch' value=on, enum=off on # 执行录音操作 ~# arecord /data/test.wav -D hw:audiocodecadc -c 2 -r 16000 -d 5 -p 320 -b 1280 card: hw:audiocodecadc period_size: 320 buffer_size: 1280 malloc rest=320000 please wait...writing data(320000 bytes) into /data/test.wav write finish... riffType: RIFF waveType: WAVE channels: 2 rate: 16000 bits: 16 align: 4 data size: 320000播放
播放 /data/test.wav 音频文件
# 打开LINEOUTL/R switch ~# amixer -c 0 set 2 1 Card Name: audiocodecdac. numid=2, name='LINEOUTL switch' value=on, enum=off on ~# amixer -c 0 set 3 1 Card Name: audiocodecdac. numid=3, name='LINEOUTR switch' value=on, enum=off on # 执行播放操作 ~# aplay /data/test.wav -D hw:audiocodecdac -p 320 -b 1280 riffType: RIFF waveType: WAVE channels: 2 rate: 16000 bits: 16 align: 4 data size: 320000I2S/PCM
数字音频信号传输标准 I2S/PCM
驱动特性
- 支持多种采样率格式
- 播放:8~384kHz
- 录音:8~384kHz
- 支持多通道播放和录音
- 播放:1~16
- 录音:1~16
- 支持16/20/24/32bit 数据精度(硬件支持8/12/16/20/24/28/32bit)
- 支持 5 种TDM 模式
- I2S standard mode
- Left-justified mode
- Right-justified mode
- DSP-A mode (short frame PCM mode)
- DSP-B mode (long frame PCM mode)
- 支持loopback 回环模式
- 支持同时playback 和capture (全双工模式)
- 支持硬件重采样
- 支持多声卡同源播放
- 支持多声卡同步录音
音频通路
- 播放流
graph TD; Playback-->I2S-DOUT- 录音流
graph TD; I2S-DIN-->Capture- 回环流
graph TD; Playback-->Capture引脚模式配置
[daudio0] pin_mclk = port:PA23<2><0><1><default> pin_bclk = port:PA20<2><0><1><default> pin_lrck = port:PA19<2><0><1><default> pin_dout0 = port:PA22<2><0><1><default> pin_din0 = port:PA21<2><0><1><default> tdm_num = 0 daudio_master = 4 audio_format = 1 signal_inversion = 1 pcm_lrck_period = 64 slot_width_select = 32 msb_lsb_first = 0 frametype = 0 tx_data_mode = 0 rx_data_mode = 0 tdm_config = 1 mclk_div = 2 rx_sync_en = 0 rx_sync_ctl = 0配置项说明:
配置项名称 配置项说明 pin_mclk MCLK 引脚的设置 pin_bclk BCLK 引脚的设置 pin_lrck LRCK 引脚的设置 pin_dout0 DOUT0 引脚的设置 pin_din0 DIN0 引脚的设置 tdm_num I2S 使用数量的设置 daudio_master 设备主从模式的设置<br />1:BCLK、LRCK 由外部 CODEC 提供;<br />2:BCLK 由 SoC 提供,LRCK 由外部 CODEC 提供;<br />3:BCLK 由外部 CODEC 提供,LRCK 由 SoC 提供;<br />4:BCLK、LRCK 由 SoC 提供 audio_format 5 种 TDM 模式的设置,标准模式为 1、左对齐模式为 2、右对齐模式为 3、长帧模式为 4、短帧模式为 5 signal_inversion BCLK 和 MCLK 信号的翻转选择,默认都不翻转,为 1,MCLK 翻转为 2,BCLK 为 3,都翻转则为 4 pcm_lrck_period LRCK 的宽度,可选项: 16/32/64/128/256 slot_width_select slot 的宽度,可选项: 8/16/32 msb_lsb_first 大小端的设置,0 为大端,1 为小端 frametype 长帧模式和短帧模式的选择,0 为短帧,1 为长帧 tx_data_mode 发送端数据格式的选择,0 为 16 位线性 pcm 数据 rx_data_mode 接收端数据格式的选择,0 为 16 位线性 pcm 数据 tdm_config 设置 TDM 模式,0 为 DSP 的两个模式,1 为 I2S 的三种模式 mclk_div MCLK 分频系数,为 0 时无输出,可选项: 1/2/4/6/8/12/16/24/32/48/64/96/128/176/192 rx_sync_en 同步录音功能的使能 rx_sync_ctl 设置同步录音功能是否透出控件开关 驱动配置
驱动配置在 menuconfig 中在下列位置
Drivers Options ---> soc related device drivers ---> SOUND Devices ---> [*] Sound card support Platform(Audio Interface) drivers ---> [*] Allwinner Digital Audio Support Allwinner Digital Audio Choose ---> [*] Allwinner Daudio0 Support [*] Allwinner Daudio1 Support [*] Allwinner Daudio2 Support [*] Allwinner Daudio3 Support配置项说明
-
Allwinner Daudio0 Support
- I2S/PCM0 模块
-
Allwinner Daudio1 Support
- I2S/PCM1 模块
-
Allwinner Daudio2 Support
- I2S/PCM2 模块
-
Allwinner Daudio3 Support
- I2S/PCM3 模块
声卡控件
控件列表:
Card Name:snddaudio0. numid=0, name='tx hub mode' value=Off, enum=Off On numid=1, name='rx sync mode' value=Off, enum=Off On numid=2, name='loopback debug' value=Off, enum=Off On numid=3, name='sunxi daudio asrc function' value=Off, enum=Off On控件名称与功能如下表所示:
控件名称 功能 数值 tx hub mode 同源播放开关 Off;On rx sync mode 同步采样开关 Off;On loopback debug 内部回录开关 Off;On sunxi daudio asrc function 重采样开关 Off;On 使用方法
假设 snddaudio0 声卡序号为 2
录音
~# arecord /data/test.wav -D hw:snddaudio0 card: hw:snddaudio0 period_size: 1024 buffer_size: 4096 please set capture duration.. please wait...writing data(0 bytes) into /data/test.wav write finish... riffType: RIFF waveType: WAVE channels: 3 rate: 16000 bits: 16 align: 6 data size: 0播放
~# aplay /data/test.wav -D hw:snddaudio0 riffType: RIFF waveType: WAVE channels: 3 rate: 16000 bits: 16 align: 6 data size: 0snddaudio0 声卡内部回环,播录音频格式需保持一致
# 1.打开 loopback 开关 ~# amixer -c 2 set 2 1 Card Name:snddaudio0. numid=2, name='loopback debug' value=On, enum=Off On # 2.后台播放音频 ~# fork aplay /data/test.wav -D hw:snddaudio0 riffType: RIFF waveType: WAVE channels: 3 rate: 16000 bits: 16 align: 6 data size: 0 # 3.执行录音操作 ~# arecord /data/test.wav -D hw:snddaudio0 card: hw:snddaudio0 period_size: 1024 buffer_size: 4096 please set capture duration.. please wait...writing data(0 bytes) into /data/test.wav write finish... riffType: RIFF waveType: WAVE channels: 3 rate: 16000 bits: 16 align: 6 data size: 0S/PDIF
S/PDIF 数字音频接口
驱动特性
- 支持多种采样率格式
- 播放:22.05~192kHz
- 录音:22.05~192kHz
- 支持多通道播放和录音
- 播放:1~2
- 录音:1~2
- 支持 16/20/24/32bit 数据精度(硬件支持 16/20/24bit)
- 支持 loopback 回环模式
- 支持同时 playback 和 capture (全双工模式)
- 支持 IEC-60958 协议
- 支持 IEC-61937 协议
- 支持多声卡同源播放
- 支持透传播放
音频通路
- 播放通路
graph TD; Playback-->SPDIF-DOUT- 录音通路
graph TD; SPDIF-DIN-->Capture驱动配置
驱动配置在 menuconfig 中在下列位置
Drivers Options ---> soc related device drivers ---> SOUND Devices ---> [*] Sound card support Platform(Audio Interface) drivers ---> [*] Allwinner SPDIF Support配置项说明
- Allwinner SPDIF Support
- SPDIF 模块
声卡控件
控件列表:
Card Name:sndspdif. numid=0, name='spdif audio format function' value=PCM, enum=PCM DTS numid=1, name='spdif rx data type' value=IEC-60958, enum=IEC-60958 IEC-61937 numid=2, name='spdif audio hub mode' value=Disabled, enum=Disabled Enabled numid=3, name='sunxi spdif loopback debug' value=0, min=0, max=1控件名称 功能 数值 spdif audio format function 设置音频数据格式 PCM DTS spdif rx data type 设置传输协议 IEC-60958 IEC-61937 spdif audio hub mode 同源输出开关 Disabled : Enabled sunxi spdif loopback debug 内部回录开关 0:关闭 1:打开 使用方法
播放
# 播放音频 ~# aplay /data/test.wav -D hw:sndspdif riffType: RIFF waveType: WAVE channels: 2 rate: 16000 bits: 16 align: 4 data size: 320000DMIC
双/立体声数字麦克风接口。
驱动特性
- 支持多种采样率格式
- 8~48kHz
- 支持多通道录音
- channels:1~8
- 支持16/24bit 数据精度
- 支持硬件HPF 算法
- 支持多声卡同步录音
音频通路
- 录音流
graph TD; DMIC-DIN-->Capture驱动配置
驱动配置在 menuconfig 中在下列位置
Drivers Options ---> soc related device drivers ---> SOUND Devices ---> [*] Sound card support Platform(Audio Interface) drivers ---> [*] Allwinner DMIC Support配置项说明
- Allwinner DMIC Support
- DMIC 模块
使用方法
# 录音 ~# arecord /data/test.wav -D hw:snddmic -c 2 -r 16000 -d 5 -p 320 -b 1280 card: hw:snddmic period_size: 320 buffer_size: 1280 malloc rest= 320000 please set capture duration.. please wait...writing data(0 bytes) into /data/test.wav write finish... riffType: RIFF waveType: WAVE channels: 2 rate: 16000 bits: 16 align: 4 data size: 320000MAD
麦克风激活检测(Microphone Activity Detection,MAD),用于语音唤醒方案
驱动特性
- 支持AudioCodec、DMIC 音频传输接口;
- 支持16kHz, 48kHz 采样率,固定16bit;
- 支持一块64KB 的SRAM,可用于保存音频数据;
- 支持基于能量识别的语音检测模块LPSD(只支持单通道,16bit 数据,16kHz 采样率)。
音频通路
- 唤醒状态,正常录音
graph TD; ADC --> rx_fifo --> DMA --> MEM- 进入休眠,语言能量检测
graph TD; ADC --> rx_fifo --> mad_sram- 触发唤醒,继续录音
graph TD; ADC --> rx_fifo --> DMA --> MEM驱动配置
驱动配置在 menuconfig 中在下列位置
Drivers Options ---> soc related device drivers ---> SOUND Devices ---> [*] Sound card support Platform(Audio Interface) drivers ---> [*] Allwinner MAD Support需要同时使能录音源模块驱动才可正常工作,如录音源为AudioCodec,则需使能AudioCodec 驱动。
声卡控件
?> 以mad 绑定AudioCodec 声卡为例。
控件列表:
Card Name:audiocodecadc. numid=0, name='bind mad function' value=unbound, enum=unbound mad_bind numid=1, name='lpsd channel sel function' value=0th_chan, enum=0th_chan 1st_chan 2nd_chan 3rd_chan 4th_chan 5th_chan 6th_chan 7th_chan numid=2, name='mad standby channel sel function' value=Zero_Chan, enum=Zero_Chan Two_Chan Three_Chan Four_Chan numid=3, name='mad standby control' value=RESUME, enum=RESUME SUSPEND numid=4, name='MIC1 volume' value=31, min=0, max=31 numid=5, name='MIC2 volume' value=31, min=0, max=31 numid=6, name='MIC3 volume' value=31, min=0, max=31 numid=7, name='MIC1 switch' value=on, enum=off on numid=8, name='MIC2 switch' value=on, enum=off on numid=9, name='MIC3 switch' value=on, enum=off on如上,控件0-3 为mad 模块控件,控件4-9 为AudioCodec 模块控件。
控件名称 功能 数值 bind mad function 是否绑定 MAD 功能 0: 不绑定; 1: 绑定 lpsd channel sel Function 选择作为能量唤醒的通道 0: 通道 0; 1: 通道 1; mad_standby channel sel Function 设定休眠时 mad 录音通道数 Zero_Chan: 实际录音通道 mad standby control 休眠测试使用 Two_Chan: 只录制两通道Off;On 使用方法
语音唤醒
安静环境下,开启录音后进入休眠暂停录音,此时外界制造音量较大的声音,mad 模块触发唤醒
cpu,并自动继续录音。- 录音前控件设置
假设使用AudioCodec 模块MIC1 单通道作为能量能量唤醒通道。
~# amixer -c 0 set "bind mad function" 1 ~# amixer -c 0 set "lpsd channel sel function" 0 ~# amixer -c 0 set "mad standby channel sel function" 0 ~# amixer -c 0 set "MIC2 switch" 0 ~# amixer -c 0 set "MIC3 switch" 0- 开启录音
# 录音参数为单通道、16kHz采样率、16bit。 ~# fork arecord -D hw:audiocodecadc -c 1 -r 16000 -d 20 -p 320 -b 1280 /data/test.wav- 进入休眠
# 如使用休眠测试命令进入休眠,此时arecord 录音将被暂停 ~# rpccli arm standby- 外界声音唤醒
制造较大音量的外界声音,系统唤醒,并自动恢复arecord 录音,查看录音文件可录到外界唤醒声音。
语音唤醒能量唤醒阈值参数
语音唤醒能量唤醒阈值参数能量唤醒模块lpsd,识别能量主要有两个方向,瞬时能量和累计能量(前者比如是关门声,后者比如是不断说话)能量检测参数配置在
lichee/rtos-hal/hal/source/sound/platform/sunximad.c修改。参数名称 功能 可设范围 推荐值 lpsd_th 累积语音能量检测阈值 0x0 - 0xFFFF 1200 lpsd_rrun 语音能量检测开始时间 0x0 - 0xFF 145 lpsd_rstop 语音能量检测结束时间 0x0 - 0xFF 170 -
瞬时能量检测参数,主要是 lpsd_rrun 和 lpsd_rstop。
-
一般只对 stop 值进行修改;
-
如果录音数据经常缺少唤醒词的第一个字,则可以尝试降低 stop 值,可以有效提高唤醒词数据的完整性。但同时会提高误唤醒率,环境噪音也会很容易触发能量检测,唤醒系统;
-
如果想要降低误唤醒率 (环境噪音造成唤醒),则可以尝试提高 stop 值。同样的,这会导致一些唤醒词录音数据不完整,例如一些音量较低,音调较低的语料;
-
唤醒词识别率以及误唤醒率无法同时兼得,客户需要根据实际需求、场景,权衡配置参数;
-
-
累积能量检测参数,主要是 lpsd_th。
- 建议使用默认值 1200,建议修改范围 50~1200。
模块接口说明
源文件列表
platform层
lichee/rtos-hal/hal/source/sound/platform . ├── Kconfig ├── Makefile ├── objects.mk ├── sun8iw19-daudio.c ├── sunxi-daudio.c # platform 层 –> I2S/PCM,负责 I2S/PCM 模块硬件参数、DMA 相关配置。 ├── sunxi-daudio.h # platform 层 –> I2S/PCM,负责 I2S/PCM 模块硬件参数、DMA 相关配置。 ├── sunxi-dmic.c ├── sunxi-dmic.h ├── sunxi-dummy-cpudai.c # platform 层 –> AudioCodec,负责 AudioCodec 模块 DMA 相关配置。 ├── sunxi-mad.c ├── sunxi-mad.h ├── sunxi-pcm.c # platform 层 –> 公共部分,负责音频流传输,使用 DMA 方式,提供注册 platform 设备的公共函数。 ├── sunxi-pcm.h # platform 层 –> 公共部分,负责音频流传输,使用 DMA 方式,提供注册 platform 设备的公共函数。 ├── sunxi-spdif.c # platform 层 –> SPDIF,负责 SPDIF 模块硬件参数、DMA 相关配置。 ├── sunxi-spdif.h # platform 层 –> SPDIF,负责 SPDIF 模块硬件参数、DMA 相关配置。 ├── platforms ├── daudio-sun20iw2.h # platform 层 –> DMIC、SPDIF、DAUDIO 时钟框架代码 ├── dmic-sun20iw2.h # platform 层 –> DMIC、SPDIF、DAUDIO 时钟框架代码 ├── mad-sun20iw2.c # platform 层 –> DMIC、SPDIF、DAUDIO 时钟框架代码 ├── mad-sun20iw2.h # platform 层 –> DMIC、SPDIF、DAUDIO 时钟框架代码 ├── spdif-sun20iw2.h # platform 层 –> DMIC、SPDIF、DAUDIO 时钟框架代码codec层
lichee/rtos-hal/hal/source/sound/codecs . ├── ac101s.c # codec 层 –> AC101s codec ├── ac101s.h # codec 层 –> AC101s codec ├── dummy_codec.c ├── sun20iw2-codec-adc.c # codec 层 –> AudioCodec,负责 AudioCodec 模块硬件参数配置 ├── sun20iw2-codec.c # codec 层 –> AudioCodec,负责 AudioCodec 模块硬件参数配置 ├── sun20iw2-codec-dac.c # codec 层 –> AudioCodec,负责 AudioCodec 模块硬件参数配置 ├── sun20iw2-codec.h # codec 层 –> AudioCodec,负责 AudioCodec 模块硬件参数配置 ├── sunxi-codec.h # codec 层 –> 公共部分 ├── sunxi_rw_func.cmachine层
lichee/rtos/projects/xxx/src . ├── card_default.c # 负责 platform 层和 codec 层绑定。软件框图
关键数据结构
pcm 数据类结构体
sunxi_dma_params
定义audio DAI DMA 相关参数。
struct sunxi_dma_params { char *name; dma_addr_t dma_addr; uint32_t src_maxburst; uint32_t dst_maxburst; uint8_t dma_drq_type_num; };- platform 类结构体
DAUDIO
I2S/PCM 模块总结构体,包含基础平台资源、特定功能私有参数
struct sunxi_daudio_info { struct snd_platform *platform; struct sunxi_daudio_clk clk; struct daudio_pinctrl *pinctrl; uint8_t pinctrl_num; struct pa_config *pa_cfg; uint8_t pa_cfg_num; struct sunxi_daudio_param param; struct sunxi_dma_params playback_dma_param; struct sunxi_dma_params capture_dma_param; uint8_t global_enable; unsigned int hub_mode; bool playback_en; bool capture_en; int asrc_en; };SPDIF
/* 用于描述引脚*/ typedef struct { gpio_pin_t gpio; unsigned int mux; } spdif_gpio; /* 用于描述SPDIF 引脚*/ typedef struct { spdif_gpio out; spdif_gpio in; } spdif_gpio_t; /* 包含了DMA 相关参数以及时钟结构体*/ struct sunxi_spdif { struct sunxi_dma_params playback_dma_param; struct sunxi_dma_params capture_dma_param; struct sunxi_spdif_clk clk; };DMIC
/* 用于描述引脚*/ typedef struct { gpio_pin_t gpio; int mux; } dmic_gpio; /* 用于描述DMIC 引脚*/ typedef struct { dmic_gpio clk; dmic_gpio din0; dmic_gpio din1; dmic_gpio din2; dmic_gpio din3; } dmic_gpio_t; /* 用于描述DMIC 采样率*/ struct dmic_rate { unsigned int samplerate; unsigned int rate_bit; }; /* 包含了DMA 相关参数,通道数以及时钟结构体*/ struct sunxi_dmic { struct sunxi_dma_params capture_dma_param; u32 chanmap; struct sunxi_dmic_clk clk; };codec 类结构体
AudioCodec
AudioCodec 模块总结构体,包含基础平台资源、特定功能私有参数
struct sunxi_codec_info { struct snd_codec *codec; void *codec_base_addr; struct sunxi_codec_clk clk; struct sunxi_codec_param param; #ifdef CONFIG_SND_PLATFORM_SUNXI_MAD int capturing; struct sunxi_mad_priv mad_priv; #endif };软件重要接口
仅说明自定义软件接口,alsa 框架内部接口不做说明。
pcm 相关接口
创建 pcm 设备
函数原型:
int sunxi_pcm_new(struct snd_pcm *pcm)参数:
- pcm: pcm设备信息
返回值:
- 0: 成功
- 其他:失败
释放 pcm 设备
函数原型
void sunxi_pcm_free_dma_buffer(struct snd_pcm *pcm, int stream)参数:
- pcm: pcm设备信息
- stream: pcm 流信息
返回值: 无
开启 pcm 设备
函数原型:
int sunxi_pcm_open(struct snd_pcm_substream *substream)参数:
- substream: pcm 子流信息
返回值:
- 0: 成功
- 其他:失败
设置 pcm 设备参数
函数原型:
int sunxi_pcm_hw_params(struct snd_pcm_substream *substream, struct snd_pcm_hw_params *params)参数:
- substream: pcm 子流信息
- params: pcm 硬件参数
返回值:
- 0: 成功
- 其他:失败
触发 pcm 设备运行
函数原型:
int sunxi_pcm_trigger(struct snd_pcm_substream *substream, int cmd)参数:
- substream: pcm 子流信息
- cmd: 触发命令
返回值:
- 0: 成功
- 其他:失败
获取 pcm 设备帧点
函数原型:
snd_pcm_uframes_t snd_dmaengine_pcm_pointer(struct snd_pcm_substream *substream)参数:
- substream: pcm 子流信息
返回值:
- snd_pcm_uframes_t:当前DMA 缓冲指针
Platform 层接口
AudioCodec接口
初始化 DMA 参数
函数原型:
int sunxi_cpudai_platform_probe(struct snd_platform *platform)参数:
- platform: platform 信息
返回值:
- 0: 成功
- 其他:失败
更新设置 DMA 参数
函数原型:
int sunxi_cpudai_startup(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
I2S/PCM接口
I2S/PCM 模块休眠(保存寄存器、关闭时钟)
函数原型:
int sunxi_daudio_suspend(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
I2S/PCM 模块唤醒(开启时钟、初始化模块、恢复寄存器)
函数原型:
int sunxi_daudio_resume(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
设置模块BCLK 分频系数
函数原型:
int sunxi_daudio_set_clkdiv(struct snd_dai *dai, int clk_id, int clk_div)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- clk_div: clk 分频系数
返回值:
- 0: 成功
- 其他:失败
设置模块工作时钟
函数原型:
int sunxi_daudio_set_sysclk(struct snd_dai *dai, int clk_id, unsigned int freq, int dir)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- freq: 时钟频率
- dir: 时钟输出方向
返回值:
- 0: 成功
- 其他:失败
设置模块I2S 格式
函数原型:
int sunxi_daudio_set_fmt(struct snd_dai *dai, unsigned int fmt)参数:
- dai: cpu dai 信息
- fmt: I2S 格式信息
返回值:
- 0: 成功
- 其他:失败
设置模块开启工作资源(DMA 参数、组件功能等)
函数原型:
int sunxi_daudio_startup(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
设置模块硬件参数
函数原型:
int sunxi_daudio_hw_params(struct snd_pcm_substream *substream, struct snd_pcm_hw_params *params, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- params: 硬件参数
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
清除模块fifo
函数原型:
int sunxi_daudio_prepare(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
触发模块工作
函数原型:
int sunxi_daudio_trigger(struct snd_pcm_substream *substream, int cmd, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- cmd: 触发命令
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
设置模块关闭工作资源(组件功能等)
函数原型:
void sunxi_daudio_shutdown(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
SPDIF
初始化cpu dai (DMA、模块寄存器)
函数原型:
int sunxi_spdif_dai_probe(struct snd_dai *dai)参数:
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
模块休眠(保存寄存器、关闭时钟)
函数原型:
int sunxi_spdif_suspend(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
模块唤醒(开启时钟、初始化模块、恢复寄存器)
函数原型:
int sunxi_spdif_resume(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
设置模块分频系数
函数原型:
int sunxi_spdif_set_clkdiv(struct snd_dai *dai, int clk_id, int clk_div)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- clk_div: clk 分频系数
返回值:
- 0: 成功
- 其他:失败
设置模块工作时钟
函数原型:
int sunxi_spdif_set_sysclk(struct snd_dai *dai, int clk_id, unsigned int freq, int dir)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- freq: 时钟频率
- dir: 时钟输出方向
返回值:
- 0: 成功
- 其他:失败
设置模块开启工作资源(DMA 参数、组件功能等)
函数原型:
int sunxi_spdif_startup(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
设置模块硬件参数
函数原型:
int sunxi_spdif_hw_params(struct snd_pcm_substream *substream, struct snd_pcm_hw_params *params, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- params: 硬件参数
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
清除模块fifo,清除中断
函数原型:
int sunxi_spdif_prepare(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
触发模块工作
函数原型:
int sunxi_spdif_trigger(struct snd_pcm_substream *substream, int cmd, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- cmd: 触发命令
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
DMIC
初始化cpu dai (DMA、模块寄存器)
函数原型:
int sunxi_dmic_dai_probe(struct snd_dai *dai)参数:
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
模块休眠(保存寄存器、关闭时钟)
函数原型:
int sunxi_dmic_suspend(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
模块唤醒(开启时钟、恢复寄存器)
函数原型:
int sunxi_dmic_resume(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
设置模块 pll clk
函数原型:
int sunxi_dmic_set_sysclk(struct snd_dai *dai, int clk_id, unsigned int freq, int dir)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- freq: 时钟频率
- dir: 时钟输出方向
返回值:
- 0: 成功
- 其他:失败
设置模块开启工作资源(DMA 参数、组件功能等)
函数原型:
int sunxi_dmic_startup(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
设置模块硬件参数
函数原型:
int sunxi_dmic_hw_params(struct snd_pcm_substream *substream, struct snd_pcm_hw_params *params, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- params: 硬件参数
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
清除模块 fifo,清除中断
函数原型:
int sunxi_dmic_prepare(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
触发模块工作
函数原型:
int sunxi_dmic_trigger(struct snd_pcm_substream *substream, int cmd, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- cmd: 触发命令
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
Codec 层
AudioCodec(ADC/DAC)
模块休眠(保存寄存器、关闭时钟)
函数原型:
int sunxi_codec_suspend(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
模块唤醒(开启时钟、恢复寄存器)
函数原型:
int sunxi_codec_resume(struct pm_device *dev, suspend_mode_t mode)参数:
- dev: 设备信息
- mode: 休眠模式
返回值:
- 0: 成功
- 其他:失败
设置模块时钟
函数原型:
int sunxi_codec_set_sysclk(struct snd_dai *dai, int clk_id, unsigned int freq, int dir)参数:
- dai: cpu dai 信息
- clk_id: clk 辅助信息
- freq: 时钟频率
- dir: 时钟输出方向
返回值:
- 0: 成功
- 其他:失败
设置模块硬件参数
函数原型:
int sunxi_codec_hw_params(struct snd_pcm_substream *substream, struct snd_pcm_hw_params *params, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- params: 硬件参数
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
清除模块fifo,清除中断
函数原型:
int sunxi_codec_prepare(struct snd_pcm_substream *substream, struct snd_dai *dai)参数:
- substream: pcm 子流信息
- dai: cpu dai 信息
返回值:
- 0: 成功
- 其他:失败
触发模块工作
函数原型:
int sunxi_codec_trigger(struct snd_pcm_substream *substream, int cmd, struct snd_dai *dai)参数:
- name: 声卡名称
- codec: codec 设备信息
- platform_type: platform 层设备类型
返回值:
- 0: 成功
- 其他:失败
软件调试接口
模块 接口 命令 DMIC cmd_dmic_dumpcmd_dmic_dumpSPDIF cmd_spdif_dumpcmd_spdif_dumpDAUDIO cmd_daudio_dumpcmd_daudio_dump