利用TCP封装HTTP包请求天气信息
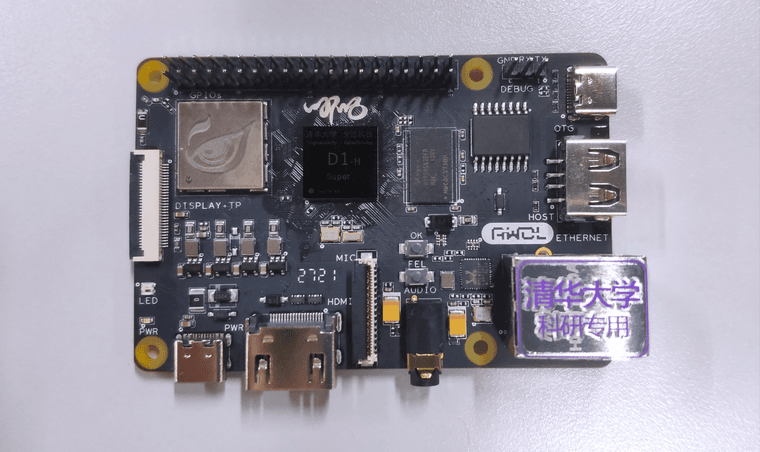
Linux还真是逐步熟悉中,现在才了解到Linux即没有原生的GUI,也没有应用层协议栈,所以要实现HTTP应用,必须利用TCP然后自己封装HTTP数据包。本篇即记录封装HTTP数据包,到心知天气请求天气信息的案例实现过程。
1、心知天气API说明
心知天气应该是当下国内使用很普遍的一个天气数据站点。相关注册和使用过程,这里就不再啰嗦了,不清楚的朋友可以自己到官网上查看(https://www.seniverse.com/)。
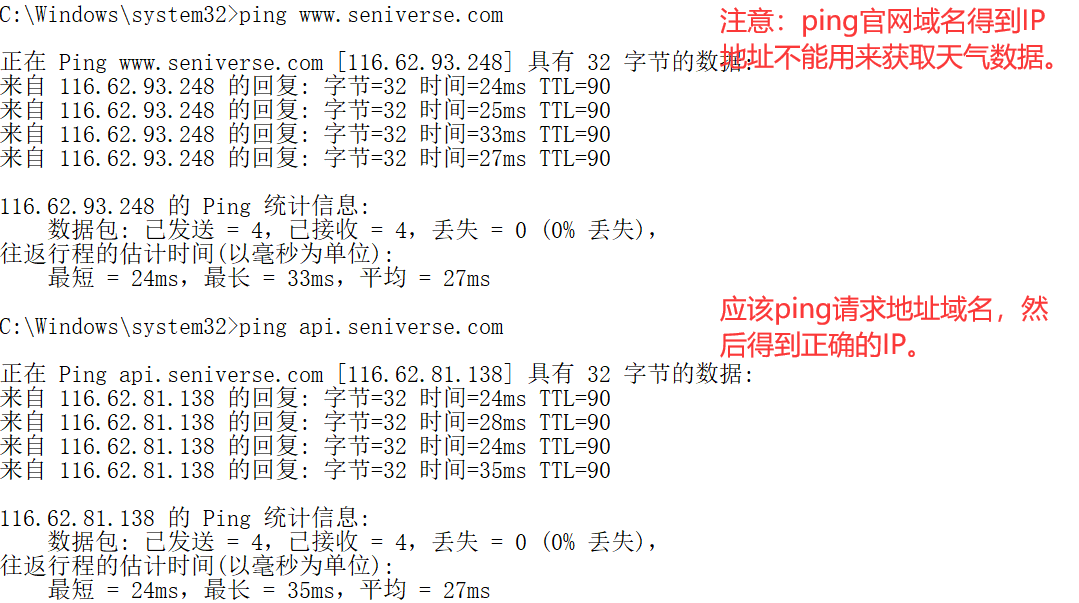
本例仅测试实时天气数据获取,天气相关数据只有“状态(晴朗之类)”和“气温”,请求接口地址如下:
https://api.seniverse.com/v3/weather/now.json?key=your_api_key&location=beijing&language=zh-Hans&unit=c
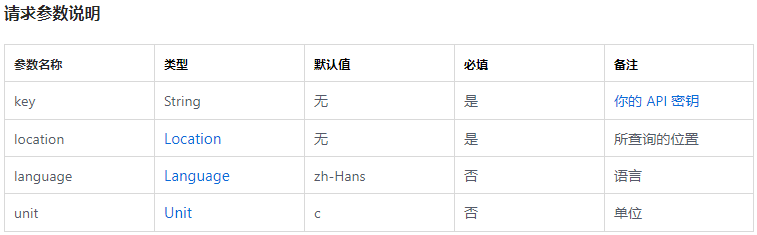
可以看到请求地址给的是域名,TCP连接需要直接给IP地址,所以用ping来获取其IP为“116.62.81.138”,端口自然是80。
得到IP地址后,先不着急编程,通过网络助手实验一把,具体过程是:选择TCP Client,连接对方IP和端口(116.62.81.138:80),然后将请求地址前加上方法字串“GET”,结尾还要有两个回车换行“\r\n\r\n”。初次测试时,忘记了回车换行符没有成功,加上后就好了。
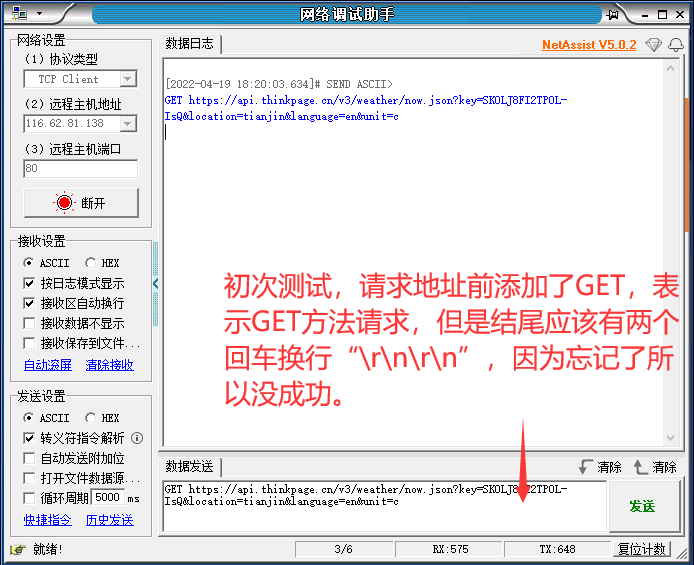
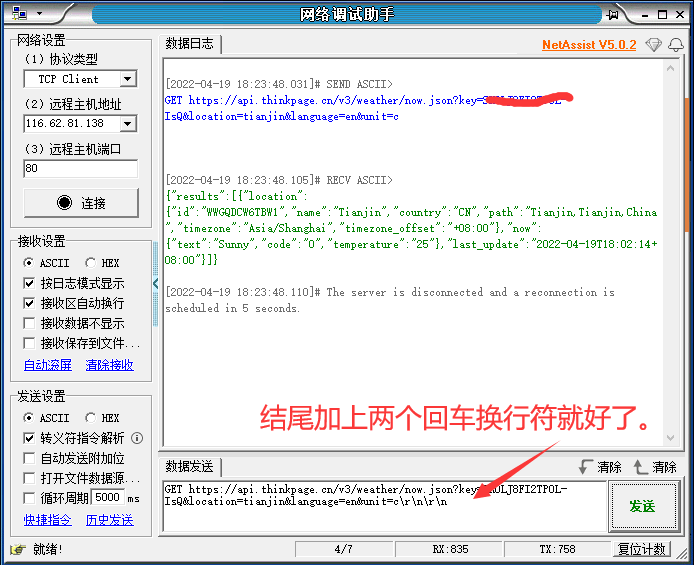
封装好的数据包是:“GET https://api.thinkpage.cn/v3/weather/now.json?key=yourkey&location=tianjin&language=en&unit=c\r\n\r\n”。
2、JSON分析
请求到的数据是JSON格式,贴到Json.cn(https://www.json.cn/)的在线工具里,可以更清晰的看到其结构。
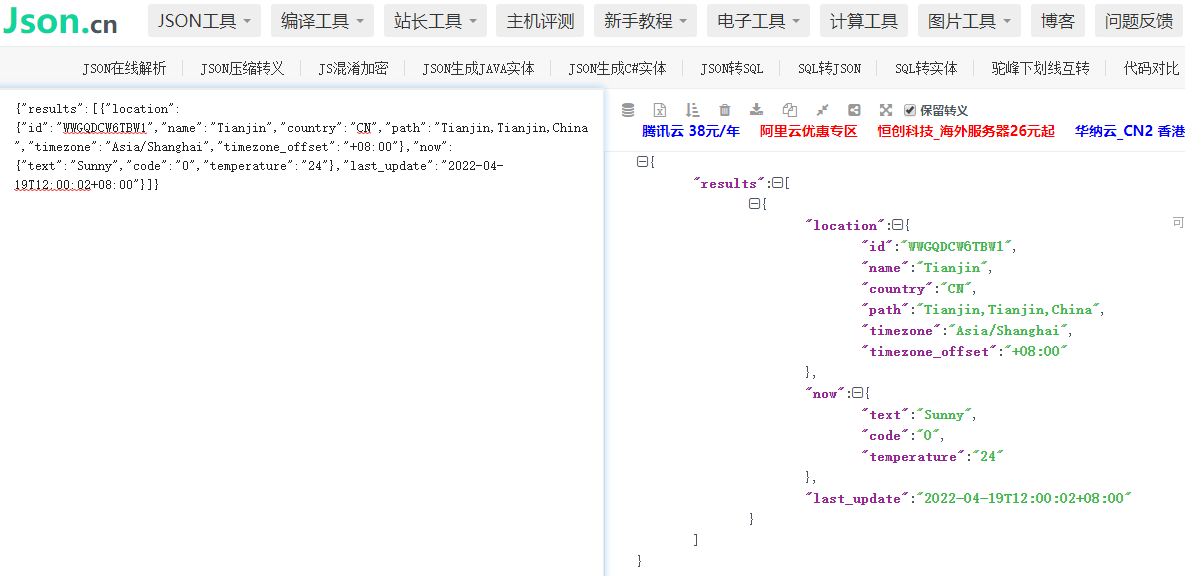
可以看到请求实时数据(now.json),得到一个JSON对象,包含一个“results”引导的JSON数组,且数组只有一个元素,元素中又包含“location”、“now”和“last_update”三个JSON对象,内部还有键值对。
既然是开发Linux API的C程序,当然利用cJSON库来帮助进行数据解析了。本人使用的库是从网上搜到的一个百度网盘分享。
链接:https://pan.baidu.com/s/1DQynsdlNyIvsVXmf4W5b8Q
提取码:ww4z
3、请求天气案例
具体思路就是建立TCP Client连接心知天气的Server,然后发送请求包,得到响应包,解析并打印出结果,案例比较简单做成单次的——开启即运行到底,代码如下:
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <string.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "cJSON.h"
#define SERVER_IP "116.62.81.138"
#define SERVER_PORT 80
#define NOW "now.json"
#define DAILY "daily.json"
#define API_KEY "SK0LJ8FI2TP0L-IsQ"
#define CITY "tianjin"
#define REQ_PACK "GET https://api.thinkpage.cn/v3/weather/%s?key=%s&location=%s&language=en&unit=c\r\n\r\n"
#define N 1024
#define errlog(errmsg) do{ perror(errmsg);\
printf("----%s----%s----%d----\n", __FILE__, __func__, __LINE__);\
return -1;\
} while(0)
//struct for weather data
typedef struct {
char id[16];
char name[32];
char country[16];
char path[64];
char timezone[32];
char tz_offset[16];
char text[16];
char code[4];
char temp[8];
char last_update[32];
} weather_t;
//parse function & print weather_t data function
void aita_ParseJsonNow(char *json, weather_t *w);
void aita_PrintWeather(weather_t *w);
int main(int argc, const char *argv[]) {
int sockfd;
struct sockaddr_in serveraddr;
socklen_t addrlen = sizeof(serveraddr);
char sendbuf[N] = "";
char recvbuf[N] = "";
weather_t weather = {0};
//create socket
if((sockfd = socket(AF_INET, SOCK_STREAM, 0)) < 0) {
errlog("socket error");
}
//connect to server of seniverse.com
serveraddr.sin_family = AF_INET;
serveraddr.sin_addr.s_addr = inet_addr(SERVER_IP);
serveraddr.sin_port = htons(SERVER_PORT);
if((connect(sockfd, (struct sockaddr*)&serveraddr, addrlen)) < 0) {
errlog("connect error");
}
//build & send request package
sprintf(sendbuf, REQ_PACK, NOW, API_KEY, CITY);
if(send(sockfd, sendbuf, N, 0) < 0) {
errlog("send error");
}
//waiting server response
if(recv(sockfd, recvbuf, N, 0) < 0) {
errlog("recv error");
}
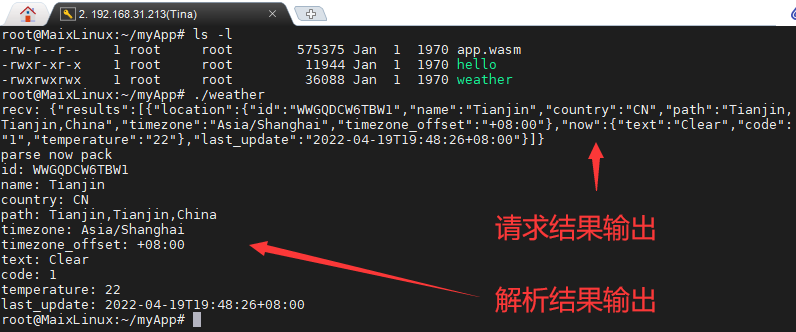
printf("recv: %s\n", recvbuf);
//parse & print data
aita_ParseJsonNow(recvbuf, &weather);
aita_PrintWeather(&weather);
close(sockfd);
return 0;
}
void aita_ParseJsonNow(char *msg, weather_t *w) {
cJSON *json, *ja, *jo, *josub, *item;
json = cJSON_Parse(msg); //parse string to cJSON type
if(json == NULL) {
printf("json type cast error: %s", cJSON_GetErrorPtr());
return;
} else {
printf("parse now pack\n");
if((ja=cJSON_GetObjectItem(json, "results")) != NULL) { //get results array
if((jo=cJSON_GetArrayItem(ja, 0)) != NULL) { //get array[0](the only item)
//get location object
if((josub=cJSON_GetObjectItem(jo, "location")) != NULL) {
if((item=cJSON_GetObjectItem(josub, "id")) != NULL) {
memcpy(w->id, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "name")) != NULL) {
memcpy(w->name, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "country")) != NULL) {
memcpy(w->country, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "path")) != NULL) {
memcpy(w->path, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "timezone")) != NULL) {
memcpy(w->timezone, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "timezone_offset")) != NULL) {
memcpy(w->tz_offset, item->valuestring, strlen(item->valuestring));
}
}
//get now object
if((josub=cJSON_GetObjectItem(jo, "now")) != NULL) {
if((item=cJSON_GetObjectItem(josub, "text")) != NULL) {
memcpy(w->text, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "code")) != NULL) {
memcpy(w->code, item->valuestring, strlen(item->valuestring));
}
if((item=cJSON_GetObjectItem(josub, "temperature")) != NULL) {
memcpy(w->temp, item->valuestring, strlen(item->valuestring));
}
}
//get last_update object
if((josub=cJSON_GetObjectItem(jo, "last_update")) != NULL) {
memcpy(w->last_update, josub->valuestring, strlen(josub->valuestring));
}
}
}
}
//delete original json pack free memory
cJSON_Delete(json);
return;
}
void aita_PrintWeather(weather_t *w) {
printf("id: %s\n", w->id);
printf("name: %s\n", w->name);
printf("country: %s\n", w->country);
printf("path: %s\n", w->path);
printf("timezone: %s\n", w->timezone);
printf("timezone_offset: %s\n", w->tz_offset);
printf("text: %s\n", w->text);
printf("code: %s\n", w->code);
printf("temperature: %s\n", w->temp);
printf("last_update: %s\n", w->last_update);
}
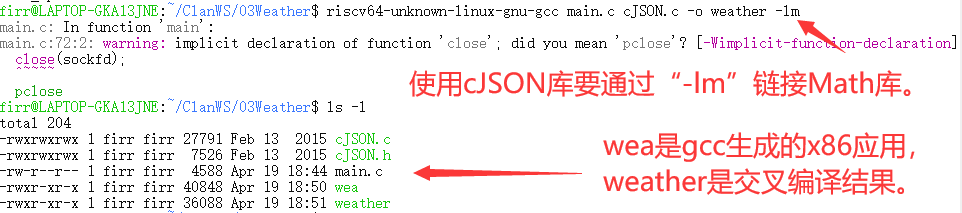
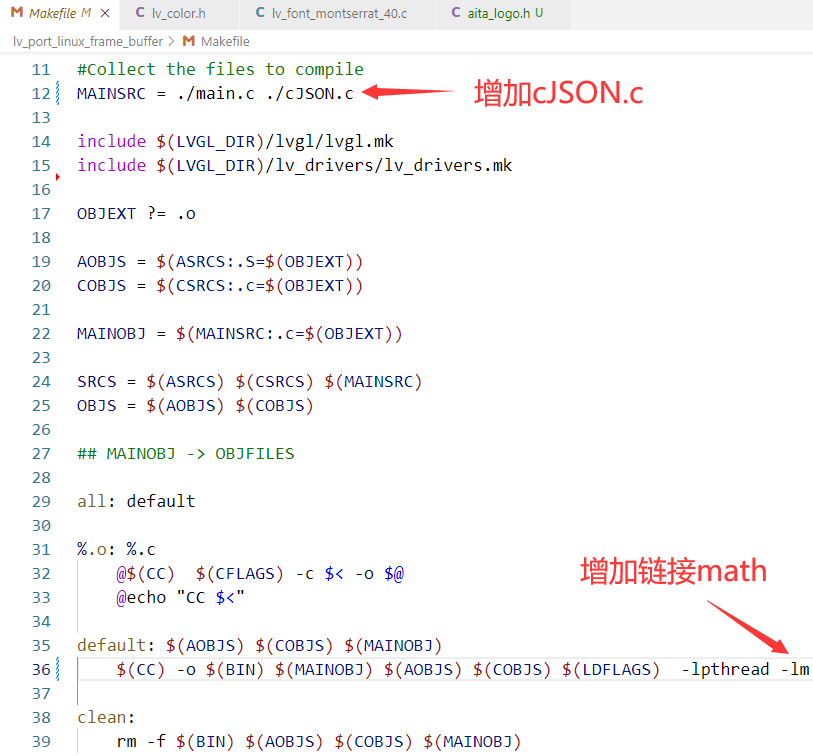
项目路径中建立了源文件main.c,编写上述代码,并导入cJSON.c和cJSON.h,编译命令为:“riscv64-unknown-linux-gnu-gcc main.c cJSON.c -o weather -lm”。因为cJSON会用到math库,而它需要“-lm”来动态链接。
lvgl显示图片和本地时间
1、lvgl的图片显示
lvgl框架中图片可以是一个文件也可以是一个变量(数组形式的图片码),当然文件还需要初始化lvgl对文件系统的接口,本例暂以变量形式提供。
应用要显示图片,则需要引入一个图片控件,然后设置它的数据源——使用“lv_img_set_src()”函数。示例如下:
lv_obj_t * icon = lv_img_create(lv_scr_act(), NULL);
/*From variable*/
lv_img_set_src(icon, &my_icon_dsc);
上述代码中“icon”是一个lvgl对象指针,通过“lv_img_create()”实例化,则对应图片控件。设置数据源时传入参数“my_icon_dsc”是lvgl中的图片描述符数据结构“lv_img_dsc_t”——本身是一个结构体类型,其定义源码如下:
//in “../lvgl/src/draw/lv_img_buf.h”
typedef struct {
uint32_t cf : 5; /*Color format: See `lv_img_color_format_t`*/
uint32_t always_zero : 3; /*It the upper bits of the first byte. Always zero to look like a
non-printable character*/
uint32_t reserved : 2; /*Reserved to be used later*/
uint32_t w : 11; /*Width of the image map*/
uint32_t h : 11; /*Height of the image map*/
} lv_img_header_t;
typedef struct {
lv_img_header_t header; /**< A header describing the basics of the image*/
uint32_t data_size; /**< Size of the image in bytes*/
const uint8_t * data; /**< Pointer to the data of the image*/
} lv_img_dsc_t;
示例代码中,图片描述符变量的定义过程如下代码:
uint8_t my_icon_data[] = {0x00, 0x01, 0x02, ...};
static lv_img_dsc_t my_icon_dsc = {
.header.always_zero = 0,
.header.w = 80,
.header.h = 60,
.data_size = 80 * 60 * LV_COLOR_DEPTH / 8,
.header.cf = LV_IMG_CF_TRUE_COLOR, /*Set the color format*/
.data = my_icon_data,
};
其中,枚举“LV_IMG_CF_TRUE_COLOR”是色彩格式定义,表示RGB格式。
宏“LV_COLOR_DEPTH”则定义色彩深度,它位于“lv_conf.h”,用户可以自定义。本例中设置为32,即4字节的ARGB8888格式。
2、时间获取
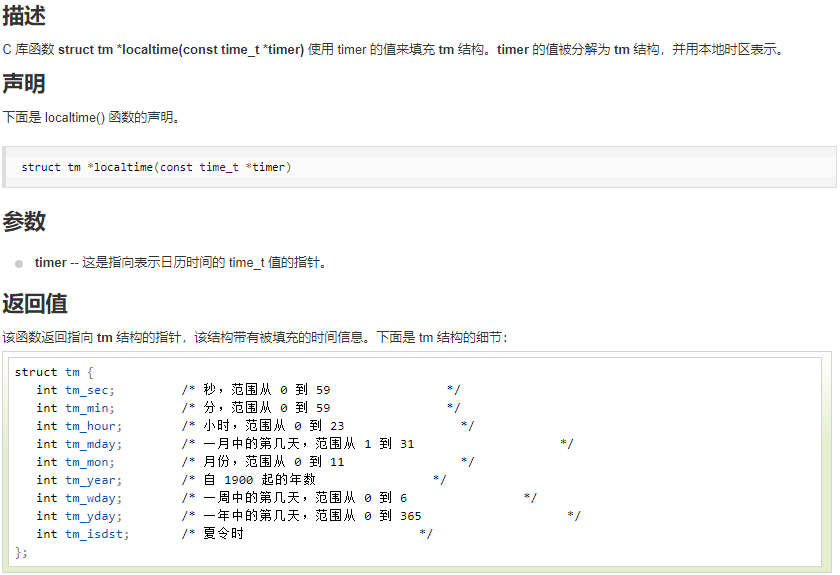
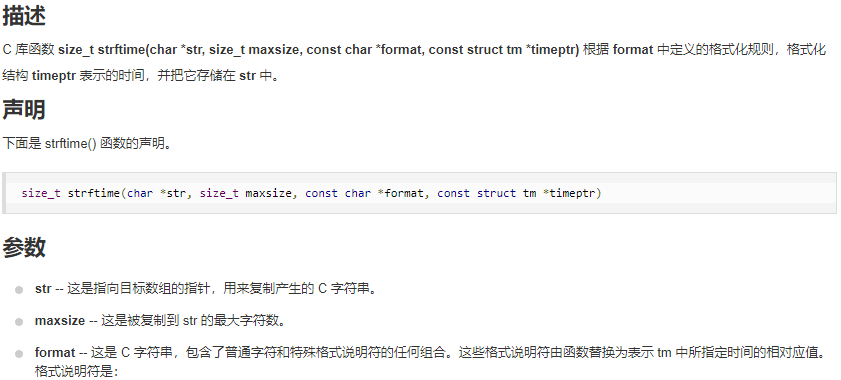
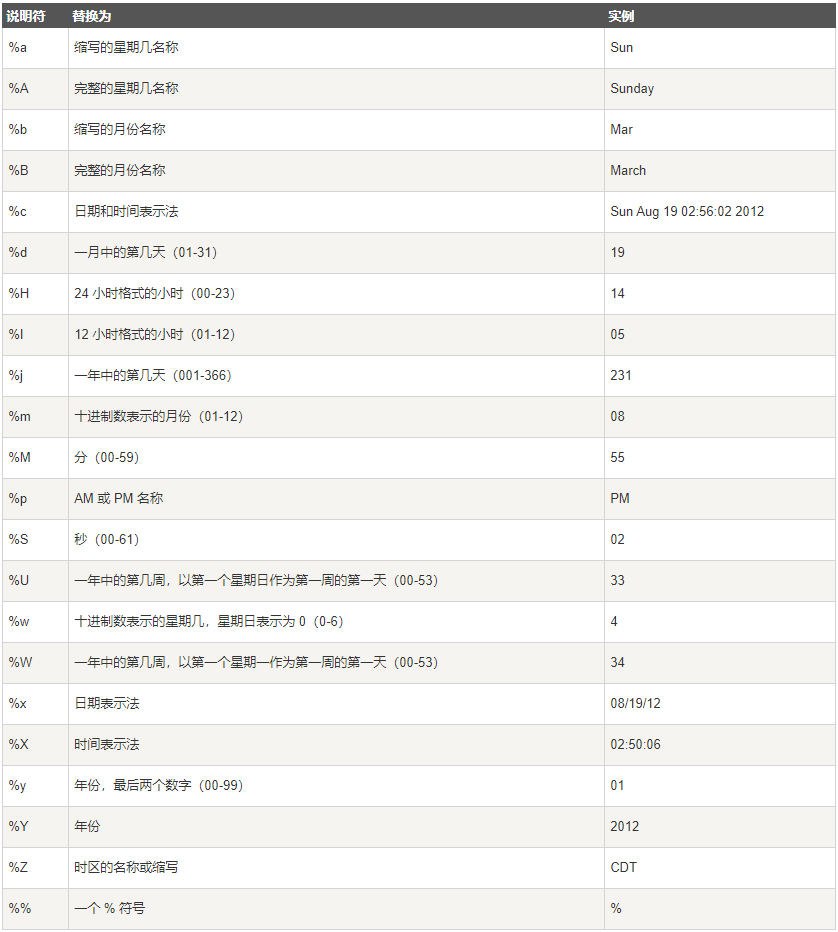
86板的Tina Linux可以通过C time库轻松地获得本地时间等数据。本例使用的API有:time()、localtime()、strftime()以及time_t、struct tm。
3、图片和时间显示案例
本例继续使用线程管理lvgl刷新,创建1s周期的lvgl定时器,在定时器回调中获取本地时间并格式化输出。另外,系统初始时显示一个“天津”的Logo,而且初始即做一次时间获取和输出(如果不做,初始刹那label会显示默认“text”字样)。
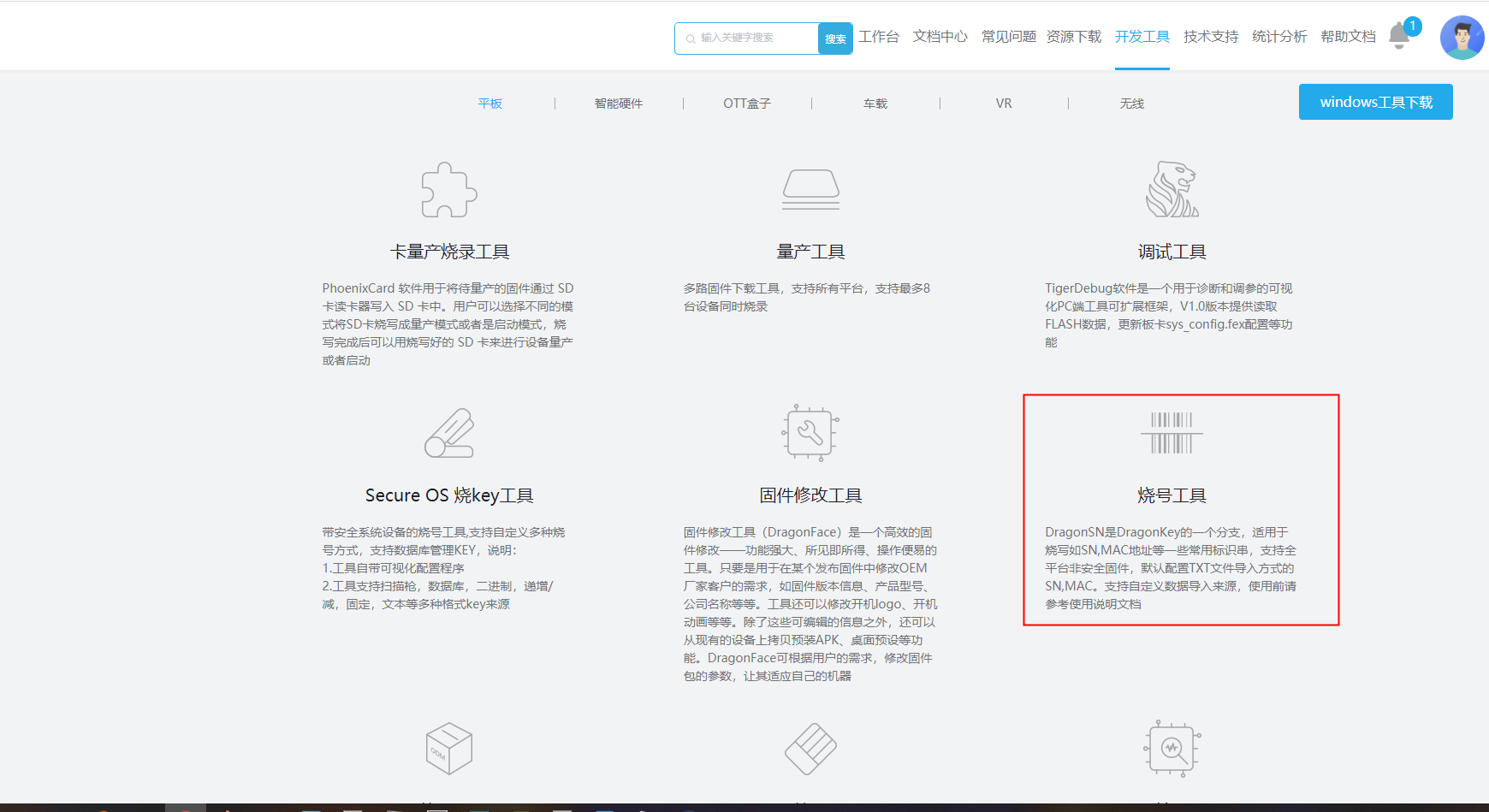
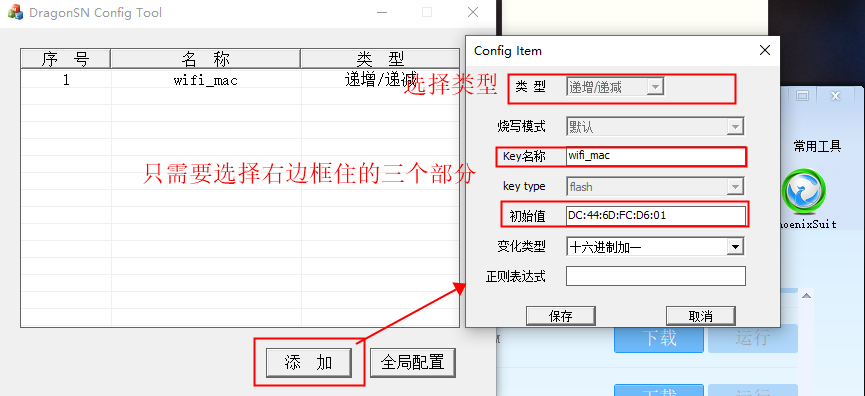
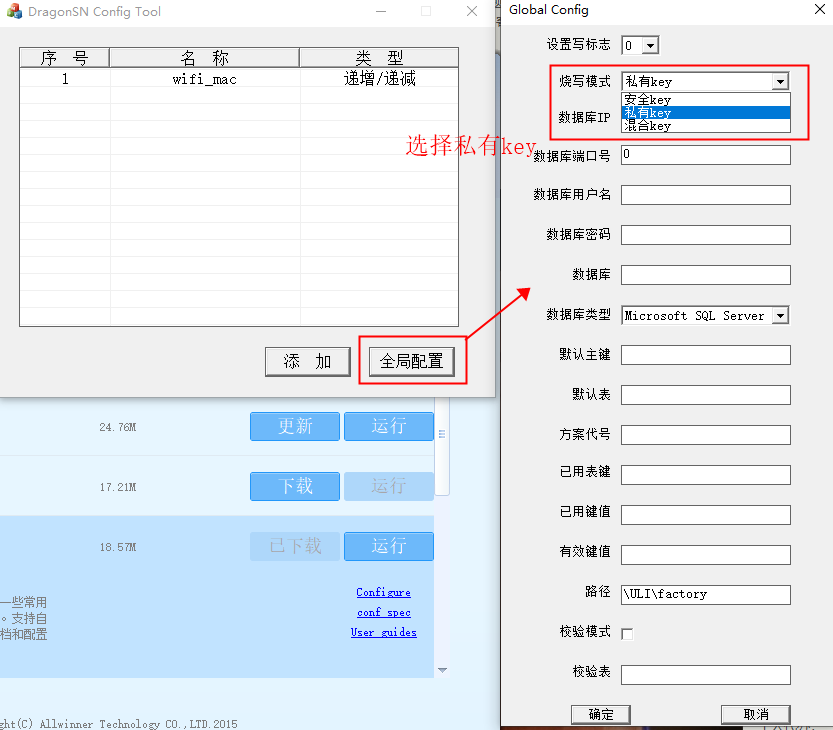
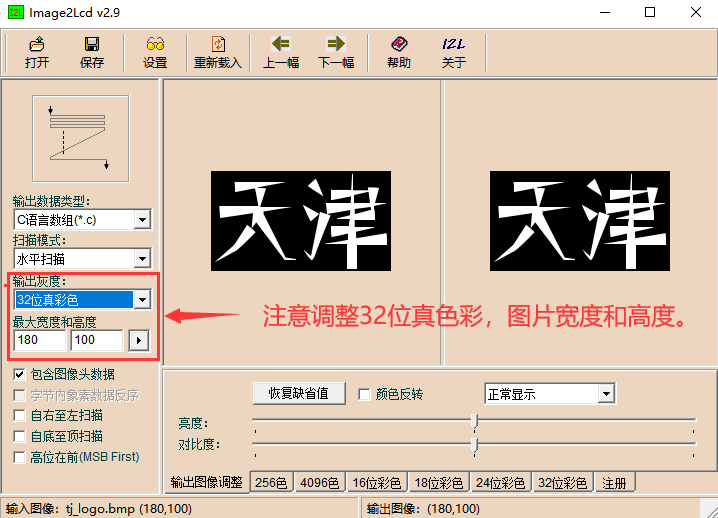
图片码通过软件“Img2Lcd”获取,软件配置方式如下图所示。图片生成的数组有72008个字节,被放置到头文件“aita_logo.h”。
/* Includes ------------------------------------------------------- */
#include "lvgl/lvgl.h"
#include "lv_drivers/display/fbdev.h"
#include "lv_drivers/indev/evdev.h"
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <pthread.h>
#include <time.h>
#include <sys/time.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include "aita_logo.h"
/* Private macro -------------------------------------------------- */
#define AITA_DISP_BUF_SIZE (128 * 1024)
#define AITA_SCREEN_WIDTH 480
#define AITA_SCREEN_HEIGHT 480
#define AITA_TITLE_STRING "AITA Weather for LicheeRV with LVGL"
#define SEND_PERIOD 1000
#define errlog(errmsg) do{ perror(errmsg);\
printf("----%s----%s----%d----\n", __FILE__, __func__, __LINE__);\
return;\
} while(0)
/* Global variables ----------------------------------------------- */
lv_indev_t *aita_indev; //pointer of indev
lv_obj_t *sys_scr; //pointer of system screen instance
lv_obj_t *head_label; //pointer of title label instance
lv_obj_t *main_label; //pointer of main label instance
char main_label_text[32]; //main label text string for datetime
lv_obj_t *logo_img; //pointer of city logo image instance
lv_timer_t *sec_timer; //pointer of timer instance for tcp polling
pthread_t lvgl_tid; //lvgl thread id
pthread_t tcprecv_tid; //tcp receive thread id
pthread_mutex_t lvgl_mutex; //mutex for lvgl tick
//image descriptor for logo_img
//ARGB8888 image 180*100 which code array is 'tj_logo'
lv_img_dsc_t img_dsc_city = {
.header.always_zero = 0,
.header.w = 180,
.header.h = 100,
.data_size = 18000 * LV_COLOR_SIZE / 8,
.header.cf = LV_IMG_CF_TRUE_COLOR,
.data = tj_logo,
};
/* Private function prototypes ------------------------------------ */
void aita_InitLVGL(void);
void aita_CreateMainUI(void);
void *thread_lvgl(void *arg);
void sec_timer_cb(lv_timer_t *timer);
void aita_InitTimer(void);
void aita_GetTime(void);
/* Private functions ---------------------------------------------- */
int main(void) {
void *retval;
//by author. initialize lvgl including displaybuffer, device for disp & input
aita_InitLVGL();
//by author. initialize and register event device
//these code must be in main(), otherwise the touch will fail.
static lv_indev_drv_t indev_drv;
lv_indev_drv_init(&indev_drv);
indev_drv.type = LV_INDEV_TYPE_POINTER; //by author. choice touchpad
indev_drv.read_cb = evdev_read; //by author. input callback
aita_indev = lv_indev_drv_register(&indev_drv);
//by author. create the main view when the demo starts up
aita_CreateMainUI();
//by author. create a timer
aita_InitTimer();
//by author. create mutex for lvgl
if(pthread_mutex_init(&lvgl_mutex, NULL) != 0) {
errlog("initialize mutex error");
}
//by author. create lvgl thread
if(pthread_create(&lvgl_tid, NULL, thread_lvgl, (void *)0) != 0) {
errlog("create lvgl thread error");
}
//by author. wait for thread exit, this demo should never be here.
pthread_join(lvgl_tid, &retval);
printf("lvgl thread exit, return value: %s\n", (char *)retval);
pthread_mutex_destroy(&lvgl_mutex);
return 0;
}
/*Set in lv_conf.h as `LV_TICK_CUSTOM_SYS_TIME_EXPR`*/
uint32_t custom_tick_get(void)
{
static uint64_t start_ms = 0;
if(start_ms == 0) {
struct timeval tv_start;
gettimeofday(&tv_start, NULL);
start_ms = (tv_start.tv_sec * 1000000 + tv_start.tv_usec) / 1000;
}
struct timeval tv_now;
gettimeofday(&tv_now, NULL);
uint64_t now_ms;
now_ms = (tv_now.tv_sec * 1000000 + tv_now.tv_usec) / 1000;
uint32_t time_ms = now_ms - start_ms;
return time_ms;
}
void aita_InitLVGL(void) {
/*LittlevGL init*/
lv_init();
/*Linux frame buffer device init*/
fbdev_init(); //by author. initialize framebuffer device for display
evdev_init(); //by author. initialize event device for touchpad
/*A small buffer for LittlevGL to draw the screen's content*/
static lv_color_t buf[AITA_DISP_BUF_SIZE];
/*Initialize a descriptor for the buffer*/
static lv_disp_draw_buf_t disp_buf;
lv_disp_draw_buf_init(&disp_buf, buf, NULL, AITA_DISP_BUF_SIZE);
/*Initialize and register a display driver*/
static lv_disp_drv_t disp_drv;
lv_disp_drv_init(&disp_drv);
disp_drv.draw_buf = &disp_buf;
disp_drv.flush_cb = fbdev_flush;
disp_drv.hor_res = 480;
disp_drv.ver_res = 480;
lv_disp_drv_register(&disp_drv);
}
void aita_CreateMainUI(void) {
//by author. create system screen which is basic graphic level
sys_scr = lv_obj_create(lv_scr_act());
lv_obj_set_size(sys_scr, AITA_SCREEN_WIDTH, AITA_SCREEN_HEIGHT);
//by author. create the main title which is just a label
head_label = lv_label_create(sys_scr);
lv_label_set_text(head_label, AITA_TITLE_STRING);
lv_obj_align(head_label, LV_ALIGN_TOP_MID, 0, 10);
//by author. create the city logo image
logo_img = lv_img_create(sys_scr);
lv_img_set_src(logo_img, &img_dsc_city);
lv_obj_align(logo_img, LV_ALIGN_TOP_LEFT, 10, 40);
//by author. get local time and show string
aita_GetTime();
main_label = lv_label_create(sys_scr);
lv_label_set_text(main_label, main_label_text);
lv_obj_align(main_label, LV_ALIGN_TOP_LEFT, 200, 40);
lv_obj_set_style_text_font(main_label, &lv_font_montserrat_20, 0);
}
//by author. lvgl core thread function
void *thread_lvgl(void *arg) {
while(1) {
pthread_mutex_lock(&lvgl_mutex);
lv_task_handler();
pthread_mutex_unlock(&lvgl_mutex);
usleep(5000); /* sleep for 5 ms */
}
}
//by author. sec_timer callback which refresh date string
void sec_timer_cb(lv_timer_t *timer) {
aita_GetTime();
lv_label_set_text(main_label, main_label_text);
}
//by author. initialize timer for 1s timing
void aita_InitTimer(void) {
sec_timer = lv_timer_create(sec_timer_cb, 1000, NULL);
lv_timer_set_repeat_count(sec_timer, -1);
}
//by author. get local time string
void aita_GetTime(void) {
time_t tsec;
struct tm *tlocal;
tsec = time(NULL);
tlocal = localtime(&tsec);
memset(main_label_text, 0, 32);
strftime(main_label_text, 32, "%Y-%m-%d %a %H:%M:%S", tlocal);
}
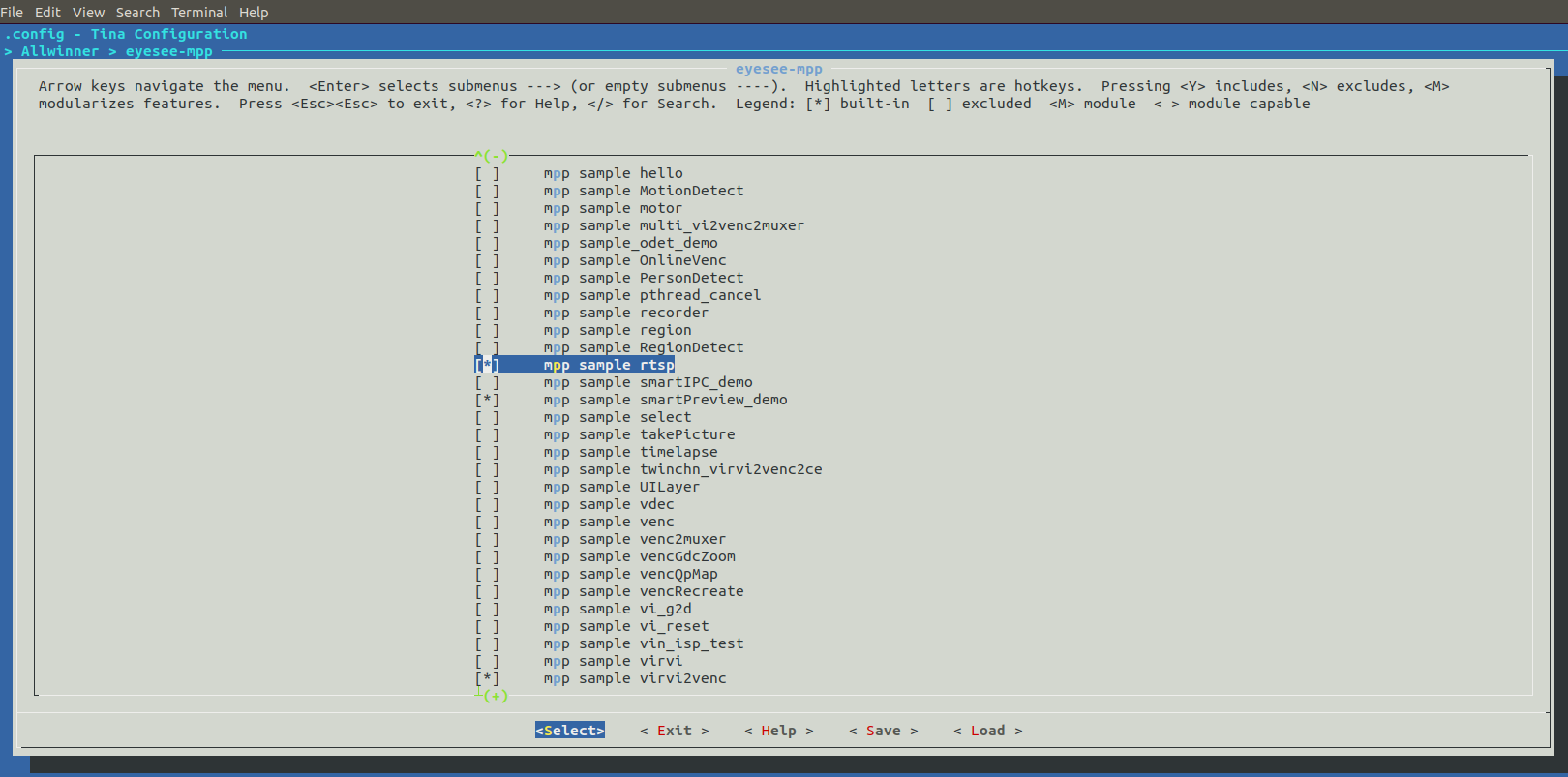
lvgl日历控件和显示天气
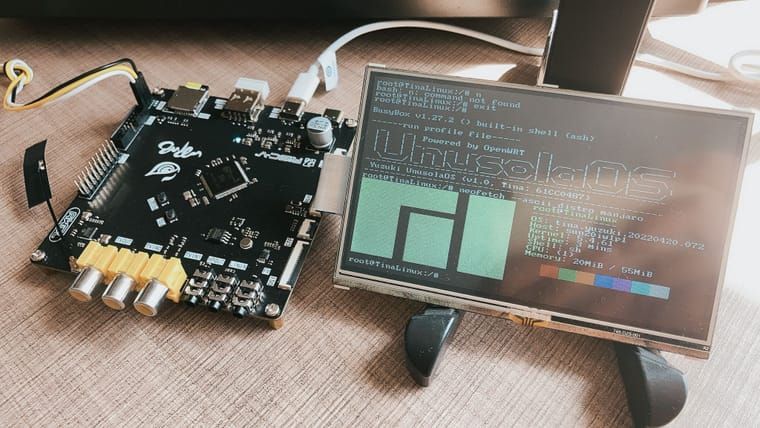
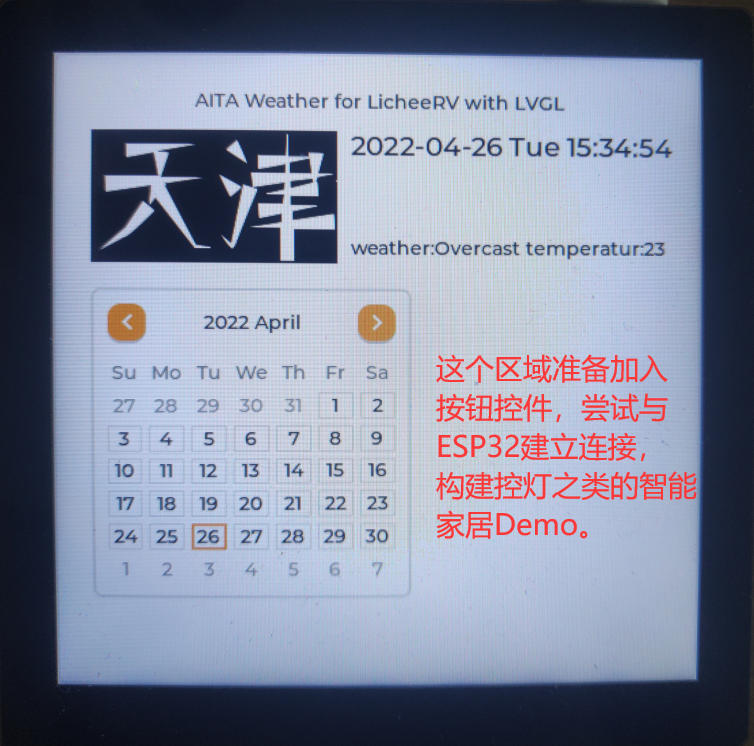
本篇结合本人前两篇的HTTP请求天气数据(通过“心知天气”网站)和lvgl显示图片及时间,在案例主界面上增加了日历显示和实时天气显示,先直接上图。
1、lvgl日历控件
calendar是lvgl提供的“Extra widgets”组件之一,需要注意的是8.0版本后有几个API的传参发生了变化,本例使用8.3版本,设置日期是需要同时传递“年、月、日”三个参数。
本例使用的API有:lv_calendar_create()、lv_canlendar_set_today_date()、lv_calendar_set_showed_date()和lv_calendar_header_arrow_create()。
lv_calendar_create()函数用于实例化calendar控件,传参是控件的父容器指针,本例使用“lv_scr_act()”即系统屏幕。

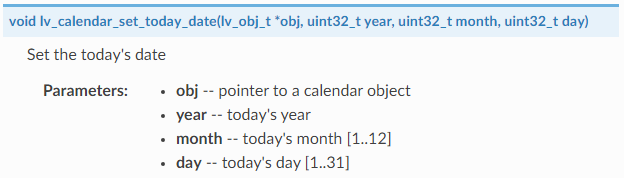
lv_canlendar_set_today_date()函数用于设置当前日期,本人使用发现lvgl是附带万年历功能的,只要设置好当天的年月日,就可以自动生成正确的日历排布。函数传参分别是控件指针和年月日数据。
关于年月日参数有两点注意事项。一是v7版本中,传参通过lv_calendar_date_t结构体,其包含年月日三个成员。二是如果使用了C time库的struct tm,注意其中年份需要加上“1900”,而月份则需要加“1”。
lv_calendar_set_showed_date()函数用于设置日历当前显示页,也就是设置当前月份。本人实验的效果是当天日期框会自动高亮,如果想设置多个高亮日期,可以使用函数lv_calendar_set_highlighted_dates()。
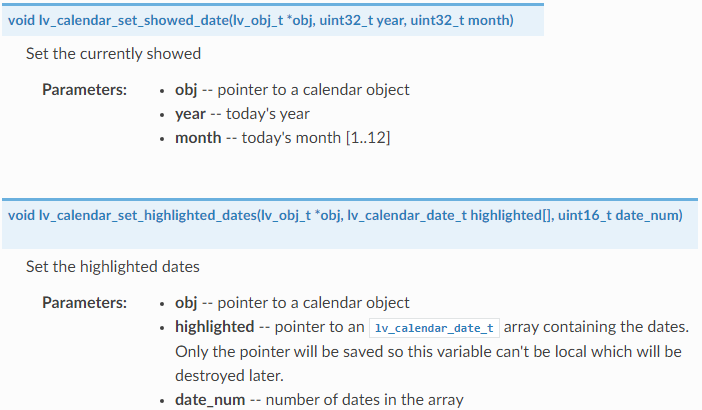
lv_calendar_header_arrow_create()函数用于向日历控件顶部增加“左、右箭头”两个按钮用于日历翻页(一页是一月)。此外,还有函数lv_calendar_header_dropdown_create()则是设置两个下拉列表分别用于选择年份和月份。这两个函数都只用传递日历控件指针一个参数,且是8.1版本新增API。
2、日历和天气显示案例
本案例的思路是:1)在应用启动时,获取当前时间(上篇中已经实现),然后将时间保存在全局量“struct tm today”中,并利用变量“today”来初始化日历控件的日期数据。2)上篇实现的时间显示案例,通过lvgl定时器,每秒获取本地数据,此处在定时器回调中再增加一个每到正分钟发送“Linux条件变量”。3)同时,应用启动时建立两个线程——lvgl线程和请求天气线程,请求天气线程等待条件变量到来,开启一次天气数据请求过程。
本例代码结合文章上半部分已经给出的案例,这里只给出改变部分。
/* Includes ------------------------------------------------------- */
// 增加头文件,cJSON用于解析JSON格式的天气数据
#include "cJSON.h"
/* Private macro -------------------------------------------------- */
// 增加请求天气数据相关的宏定义
#define HTTP_IP "116.62.81.138"
#define HTTP_PORT 80
#define NOW "now.json"
#define API_KEY "SK0LJ8FI2TP0L-IsQ"
#define CITY "tianjin"
#define REQ_PACK "GET https://api.thinkpage.cn/v3/weather/%s?key=%s&location=%s&language=en&unit=c\r\n\r\n"
#define N 1024
// struct for weather data 建立结构体存储解析后的天气数据
typedef struct {
char id[16];
char name[32];
char country[16];
char path[64];
char timezone[32];
char tz_offset[16];
char text[16];
char code[4];
char temp[8];
char last_update[32];
} weather_t;
/* Global variables ----------------------------------------------- */
// 增加显示天气的标签控件定义
lv_obj_t *weather_label; //pointer of weather label instance
// 增加日历控件定义
lv_obj_t *calendar; //pointer of calendar instance
// 定义today变量存储当前日期,用于设置日历
struct tm today; //
// 请求天气的线程ID
pthread_t reqweather_tid; //request weather thread id
// 请求天气线程等待的条件变量(min_cond)
// Linux中需要互斥量包含条件变量的使用,所以定义cond_mutex
pthread_mutex_t cond_mutex; //mutex for 1-min cond
pthread_cond_t min_cond; //1-min cond
/* Private functions ---------------------------------------------- */
int main(void) {
// other code from previous demo
// main()函数中创建互斥量、条件变量、请求天气线程
//by author. create mutex for 1-min cond
if(pthread_mutex_init(&cond_mutex, NULL) != 0) {
errlog("initialize cond mutex error");
}
//by author. create condition for 1-min
if(pthread_cond_init(&min_cond, NULL) != 0) {
errlog("initialize 1 minute condition error");
}
//by author. create request weather thread
if(pthread_create(&reqweather_tid, NULL, thread_reqweather, (void *)0) != 0) {
errlog("create request weather thread error");
}
//by author. wait for thread exit, this demo should never be here.
pthread_join(lvgl_tid, &retval);
printf("lvgl thread exit, return value: %s\n", (char *)retval);
pthread_join(reqweather_tid, &retval);
printf("request weather thread exit, return value: %s\n", (char *)retval);
pthread_mutex_destroy(&lvgl_mutex);
pthread_mutex_destroy(&cond_mutex);
pthread_cond_destroy(&min_cond);
return 0;
}
void aita_CreateMainUI(void) {
// other code from previous demo
// aita_CreateMainUI()被main()函数调用,初始化主界面。
//by author. create the weather label
weather_label = lv_label_create(sys_scr);
lv_label_set_text(weather_label, " ");
lv_obj_align(weather_label, LV_ALIGN_TOP_LEFT, 200, 120);
//by author. create the calendar
calendar = lv_calendar_create(sys_scr);
lv_obj_set_size(calendar, 235, 235);
lv_obj_align(calendar, LV_ALIGN_BOTTOM_LEFT, 10, -50);
lv_calendar_set_today_date(calendar, today.tm_year+1900, today.tm_mon+1, today.tm_mday);
lv_calendar_set_showed_date(calendar, today.tm_year+1900, today.tm_mon+1);
lv_calendar_header_arrow_create(calendar);
}
// 增加正分钟发送条件变量
void sec_timer_cb(lv_timer_t *timer) {
aita_GetTime();
lv_label_set_text(main_label, main_label_text);
if(today.tm_sec == 0) {
//by author. send condition signal per whole minute
pthread_cond_signal(&min_cond);
}
}
// 增加对today的赋值
void aita_GetTime(void) {
time_t tsec;
struct tm *tlocal;
tsec = time(NULL);
tlocal = localtime(&tsec);
today = *tlocal;
memset(main_label_text, 0, 32);
strftime(main_label_text, 32, "%Y-%m-%d %a %H:%M:%S", tlocal);
}
// 请求天气线程业务逻辑
void *thread_reqweather(void *arg) {
int sockfd;
struct sockaddr_in serveraddr;
socklen_t addrlen = sizeof(serveraddr);
char sendbuf[N] = "";
char recvbuf[N] = "";
weather_t weather = {0};
char w_string[64] = "";
while(1) {
pthread_mutex_lock(&cond_mutex);
pthread_cond_wait(&min_cond, &cond_mutex);
pthread_mutex_unlock(&cond_mutex);
//create socket
if((sockfd = socket(AF_INET, SOCK_STREAM, 0)) < 0) {
errlog("socket error");
}
//connect to server of seniverse.com
serveraddr.sin_family = AF_INET;
serveraddr.sin_addr.s_addr = inet_addr(HTTP_IP);
serveraddr.sin_port = htons(HTTP_PORT);
if((connect(sockfd, (struct sockaddr*)&serveraddr, addrlen)) < 0) {
errlog("connect error");
}
//build & send request package
memset(sendbuf, 0, N);
sprintf(sendbuf, REQ_PACK, NOW, API_KEY, CITY);
if(send(sockfd, sendbuf, N, 0) < 0) {
errlog("send error");
}
//waiting server response
if(recv(sockfd, recvbuf, N, 0) < 0) {
errlog("recv error");
}
printf("recv: %s\n", recvbuf);
//parse & print data,下面两个函数来自于“十三”案例
aita_ParseJsonNow(recvbuf, &weather);
aita_PrintWeather(&weather);
close(sockfd);
memset(recvbuf, 0, N);
//show weather string
memset(w_string, 0, 64);
sprintf(w_string, "weather:%s temperatur:%s", weather.text, weather.temp);
pthread_mutex_lock(&lvgl_mutex);
lv_label_set_text(weather_label, w_string);
pthread_mutex_unlock(&lvgl_mutex);
}
}
另外,本例在lvgl工程中增加了cJSON.c和cJSON.h文件,Makefile也做出了调整,具体如下所示。
原文链接:https://occ.t-head.cn/community/post/detail?spm=a2cl5.25411629.0.0.6597180fVP7giT&id=4039525135236603904
作者 @ firr


 图片
图片



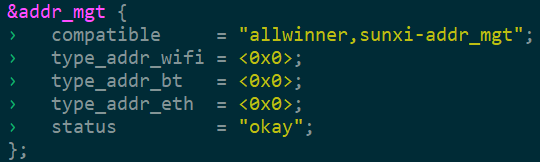
 use_ephy25m=1代表PHY使用SOC内部EPHY_25M时钟,use_ephy25m=0或者不配置该参数,代表PHY不使用SOC内部EPHY_25M时钟,
use_ephy25m=1代表PHY使用SOC内部EPHY_25M时钟,use_ephy25m=0或者不配置该参数,代表PHY不使用SOC内部EPHY_25M时钟,