@woodcat 好的,非常谢谢你帮忙测试。你再看看v853的硬件设计文档。
iysheng 发布的帖子
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat V853 RTC外部晶振相关的管脚我没有引出来
 也不知道 bootrom 部分的代码有没有初始化 RTC
也不知道 bootrom 部分的代码有没有初始化 RTC 

-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@whycanservice2 我仔细对比了官方原理图,有一个疑惑?

我看 RESET是开漏的,

为什么这里的R1电阻是NC呢?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@whycanservice2 在 AXP2101 DCDC1 输出异常,上电会闪烁一下 中说:
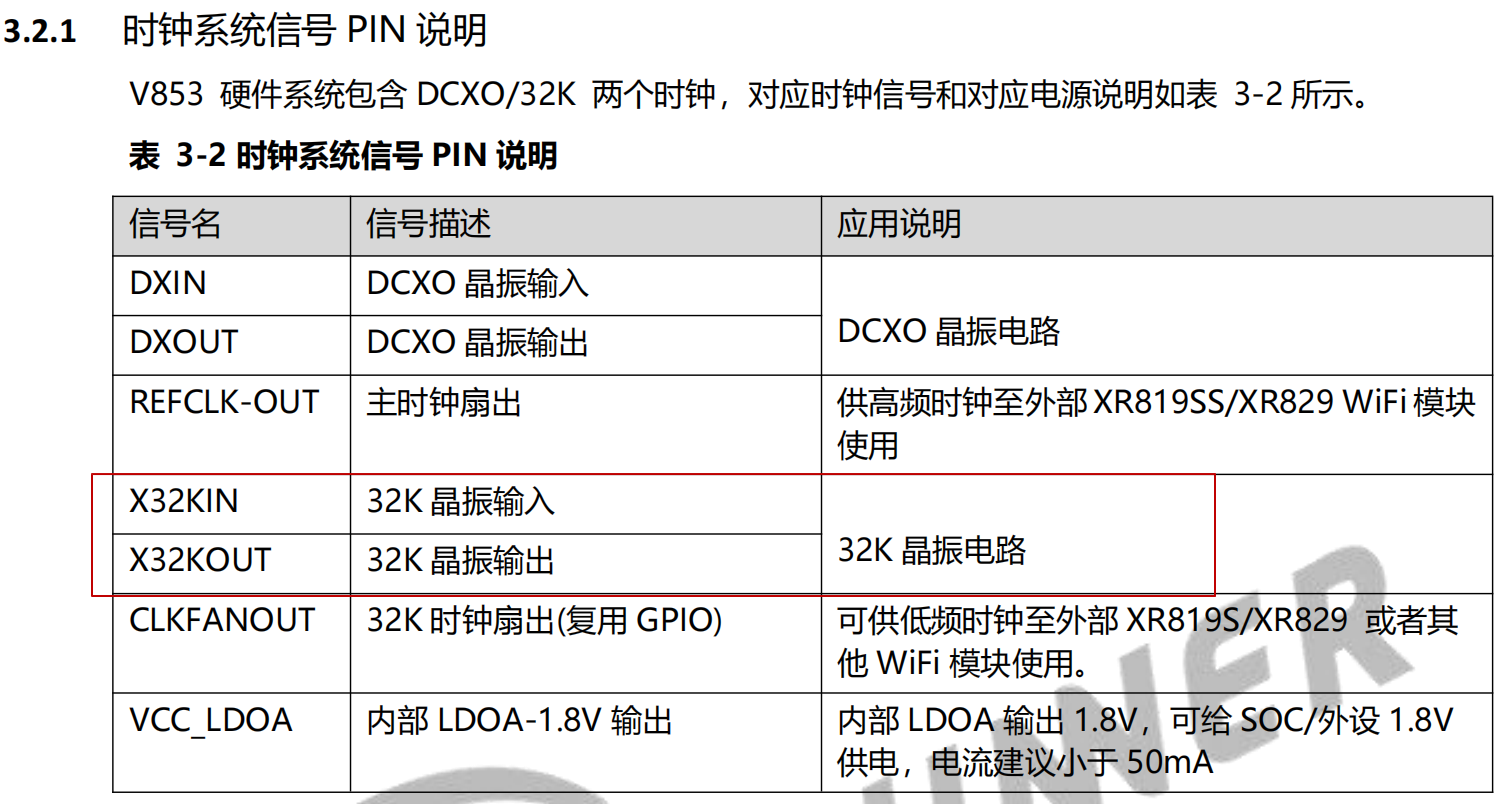
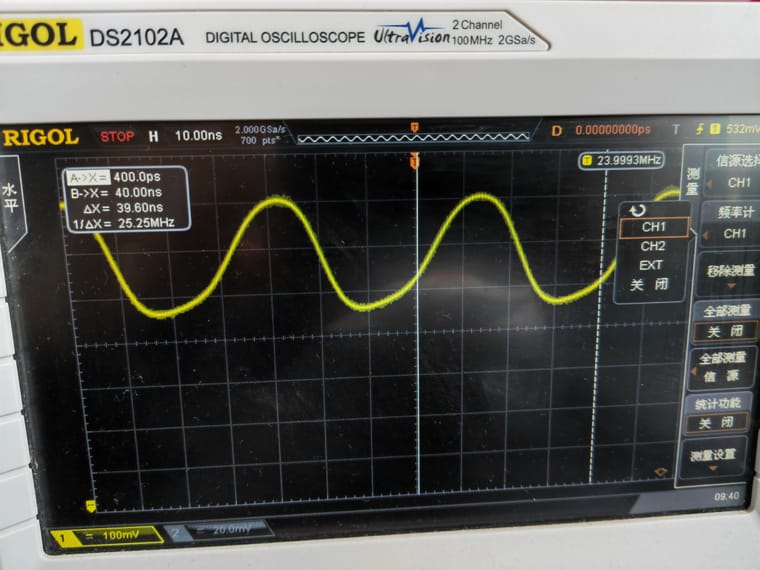
@iysheng soc端的 usb id接地暂时没有影响,因为这个是需要配置的,在系统未启动之前它应该不能影响进入下载模式。还有个问题 晶振为什么是25Mhz的?。。可以理解为正常供电 没有sdram应该能进入下载模式,还有,串口无打印是需要配置的,在系统启动先只有默认uart0 才有输出三个C。
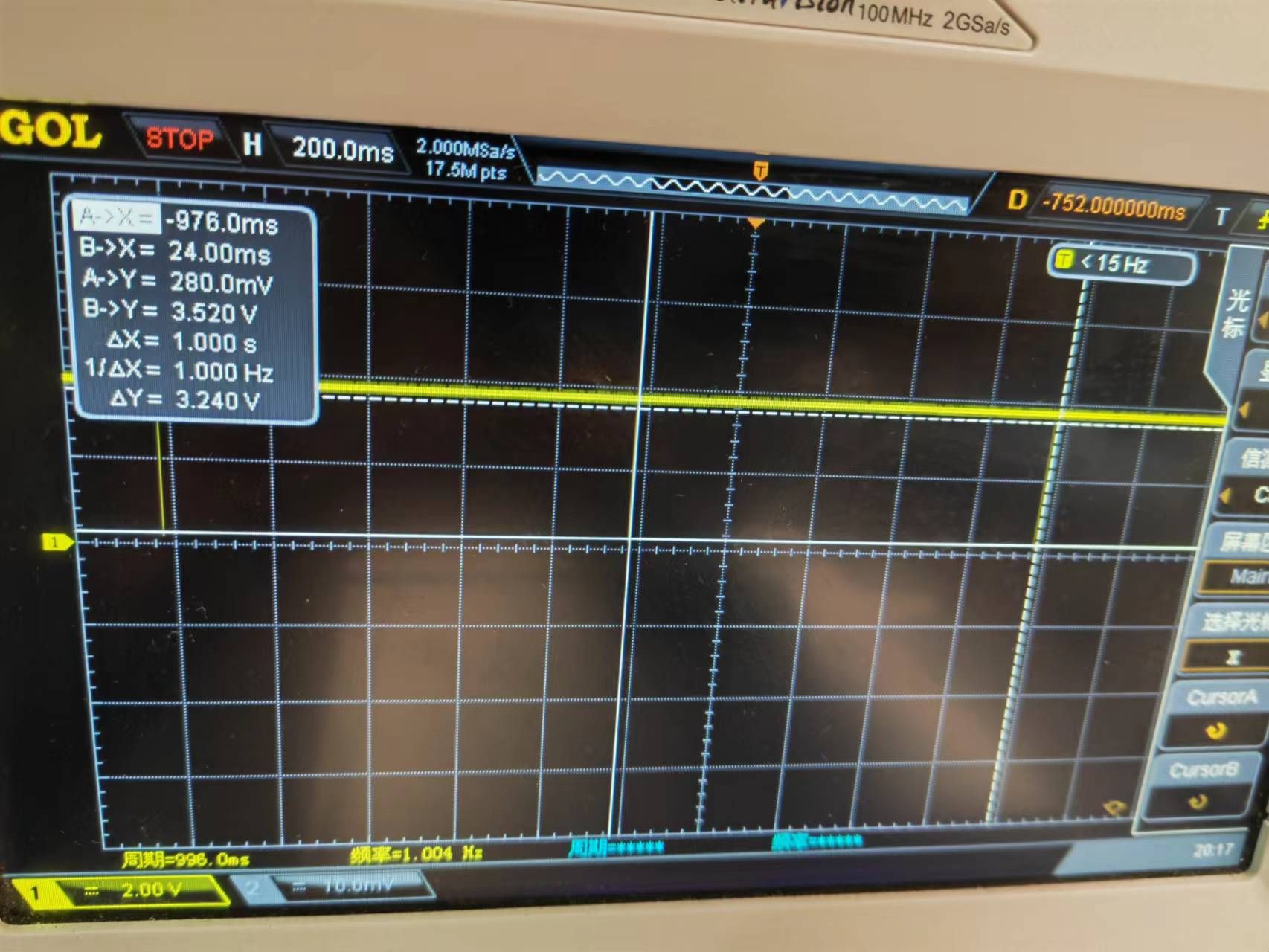
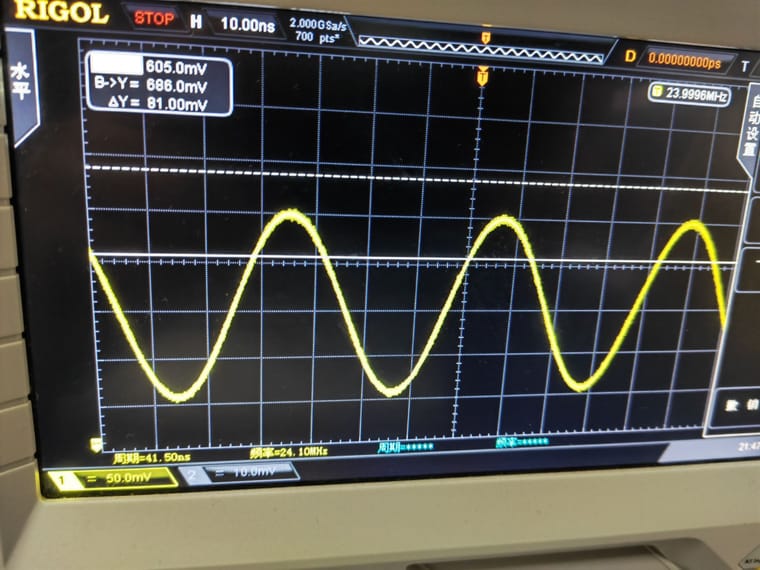
1.不好意思,这个频率我说错了(我是用光标来粗略看25Mhz,我换用示波器的频率计是23.9993MHz),具体图片是这样的
2. 请问你说的,系统启动先只有默认uart0 是什么意思啊?这个启动先我不是特别理解?(这个uart0的波特率也是115200吗?并且只会输出三个c吗?不会一直输出吗?)
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@lovexulu 今天重新测试了一块(上电前将 Xr819 就给拆掉了),还是无法识别设备链接,并且调试串口无打印,请问进入下载模式,我用的是 micro usb 接口,不是 type c ,有一个usb id 我是直接接地的,这个会有影响么?这个板子比上一个好一点的是接上 ttl 后在接到电脑也是可以正常上电的。并且测试了晶振也是有 25 Mhz 的波形的。我能不能简单理解只要v853供电正常,纵使没有 sdram和emmc也是可以进入到下载模式的呢?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
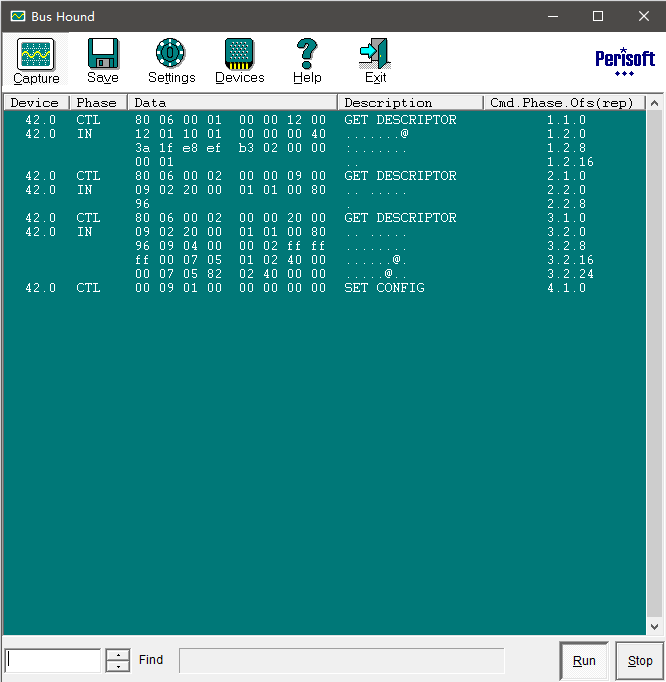
@lovexulu power off(长按)功能测试是可以了。现在感觉还是 V853 工作不正常。我尝试用 bus hound 抓取 usb 的包,发现只能抓到如下内容:
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@lovexulu 请问这种 AXP2101 原理图中标注 0.01欧姆的电阻,我直接短接可以么?我都是直接短接的。
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@lovexulu @woodcat 请教两位大佬,XR819 和 XR819S 是不是两颗不同的芯片啊?我在 TB 上没有搜出来 XR819S。但是我参考的全志官方的原理图上面写的 XR819S,我也是按照 XR819S 画的图。我再网上搜出来 XR819 的管脚,发现两个管脚定义不一样。(我贴的芯片是 XR819)
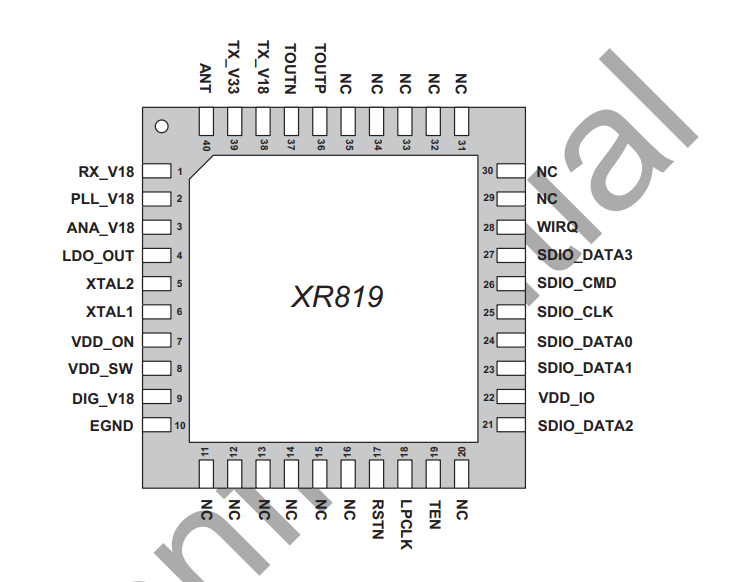
不知道是不是这个芯片导致的异常。v853_PER1_DDR3_16x1_v2_0_202112.pdf
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat @lovexulu 感谢两位大佬的耐心指导,我又仔细看了 AXP2101 的 30pin PWRON 管脚描述:

我理解的 PWRON 如果是低电平 AXP2101 的各路输出是不是应该都不输出了啊?我这个电路,发现对应的按键按下去后,DCDC1还是有 3.3V 的输出。不知道这个是不是也不正常啊?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
- 我这边使用的调试串口是 PH7 和 PH8 管脚,但是我没有在原理图中看到 PH 这组管脚对应的 I/O 供电管脚。平时我用这个USB转TTL的调试工具调试 GD32芯片是可以正常用的(3.3V电平)。
- 我仔细和官方的原理图进行了对照,原理图中 N/C 的我默认就是没有接的,在我原理图中要不然就是直接断开了,或者就是也是标记的 N/C(这种在 SMT 贴片都没有贴的),我自己对照之后并未发现异常
 ,我也将我的原理图放在附件中了。
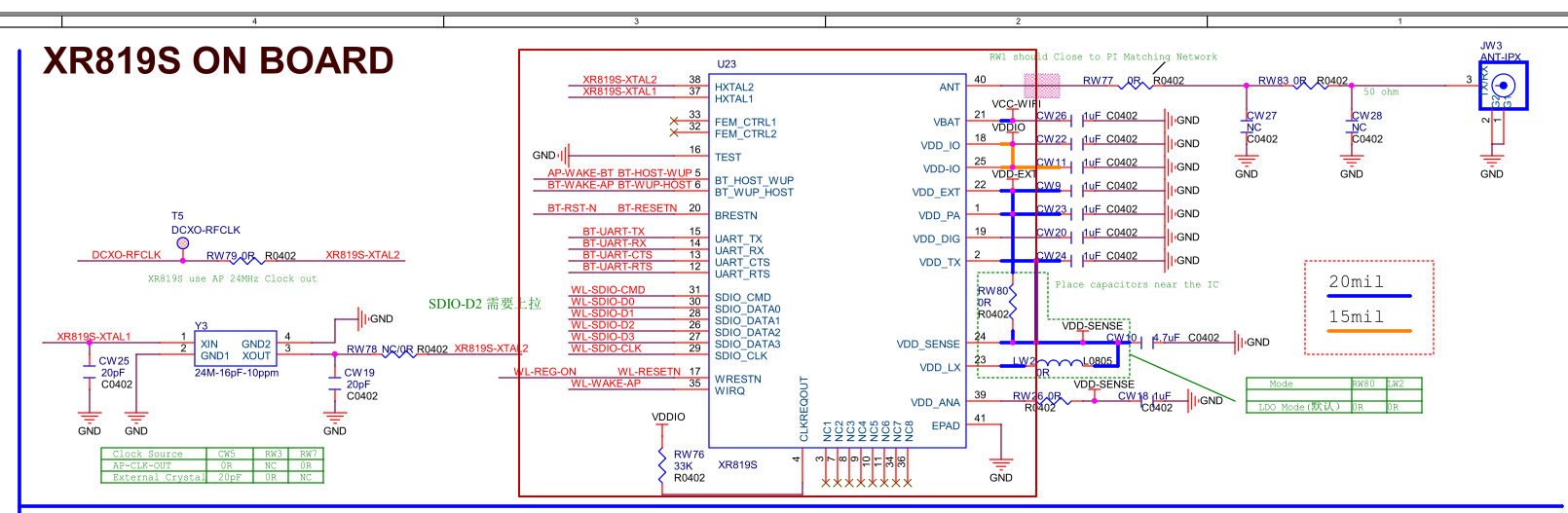
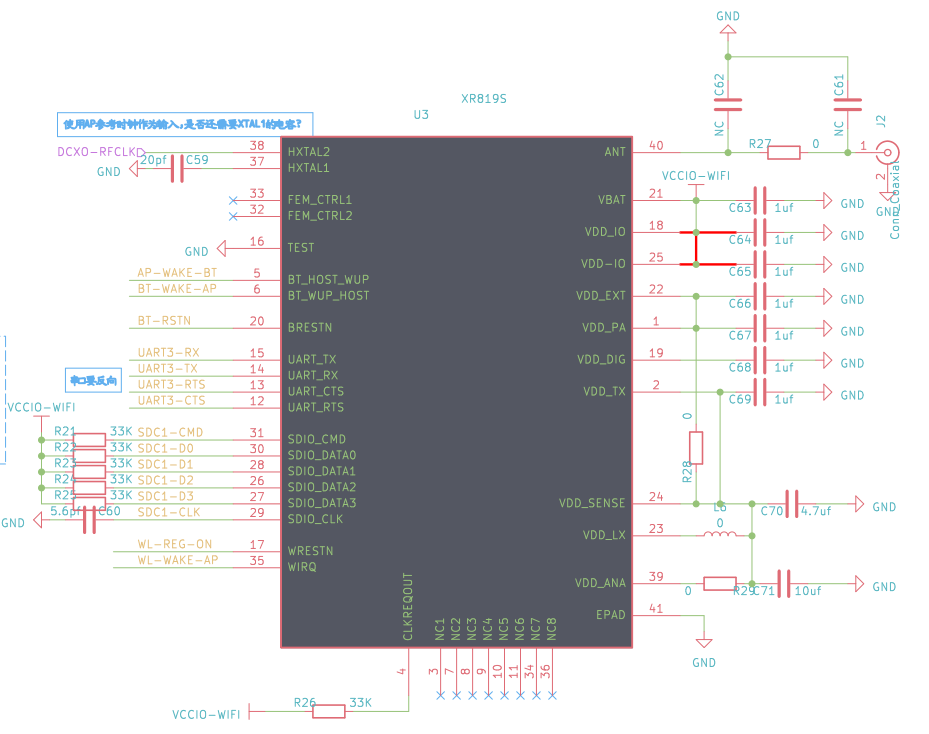
,我也将我的原理图放在附件中了。 - 现在还有一个奇怪的现象。我这上面有一个 XR819S,这个芯片的天线和 GND 竟然是短接的,不知道是什么情况?
 这部分电路我截图如下:
这部分电路我截图如下:
原理图.pdf
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
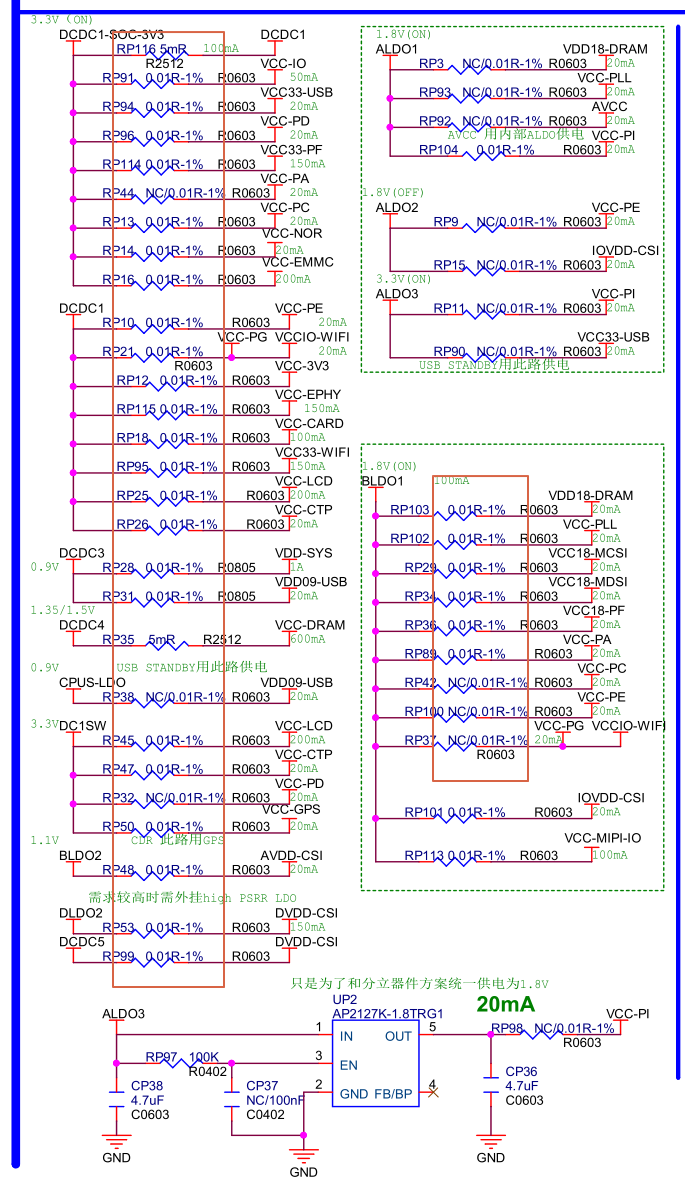
@lovexulu 我对照了 AXP2101 的文档 6.6 节。我主要使用了的供电用红色边框圈出来了:
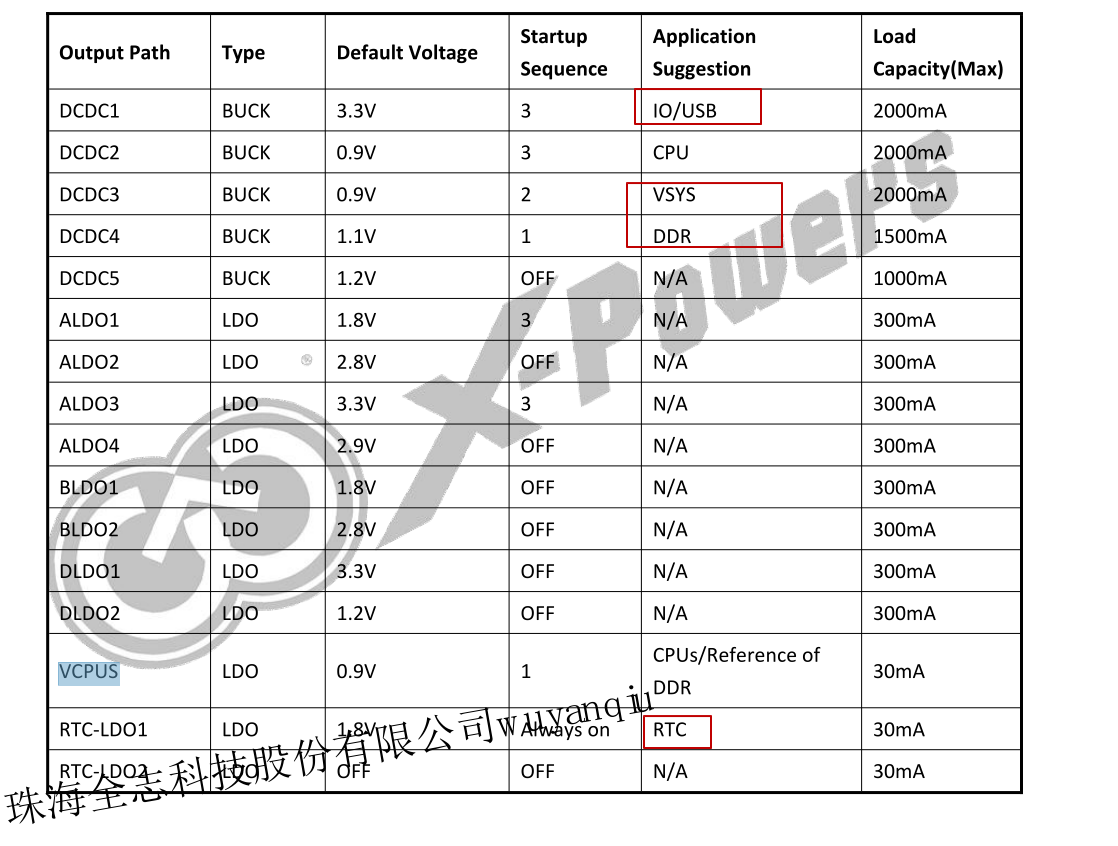
测试 AXP2101 输出的电压均正常。现在有一个奇怪的现象,我用一个 USB 转 TTL 接到板子,TX 和 RX 电压在 1.9V 附近就会导致系统无法启动。3.3V(DCDC1) 的电源灯也不亮。请问在电脑端可以看到这个设备驱动是不是就说明 V853 的 USB 可以正常通信呢?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@lovexulu 针对 AXP2101 ,PWRON (pin30)和 PWRON(pin29) 均没有上拉到 RTC。在这种情况下实际测试 PWRON 电压为 1.8V,PWROK 电压为 1V。从 V853 来看,我的 PWR_BYP 管脚为下拉接地。这部分原理图是:
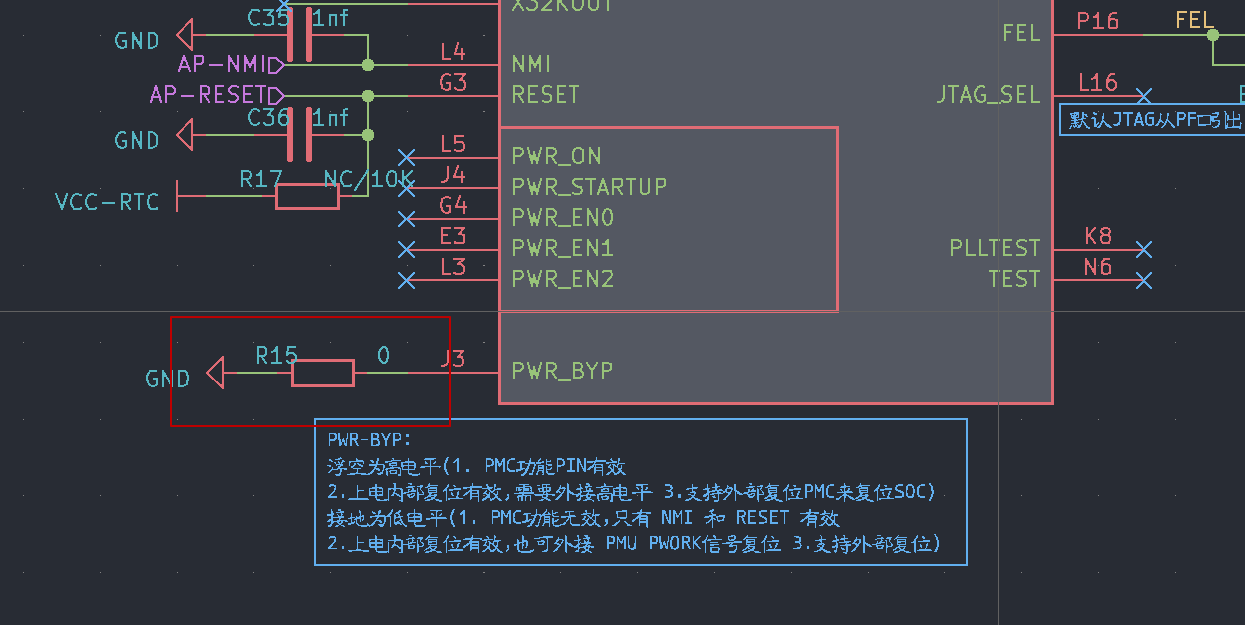
V853 的 PWR_ON 管脚是悬空的。请问 AXP 的 PWRON (pin30)和 PWRON(pin29) 都需要上拉到 VCC_RTC 么?V853开发板原理图20220624.pdf.pdf
附件是我参考的原理图。
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
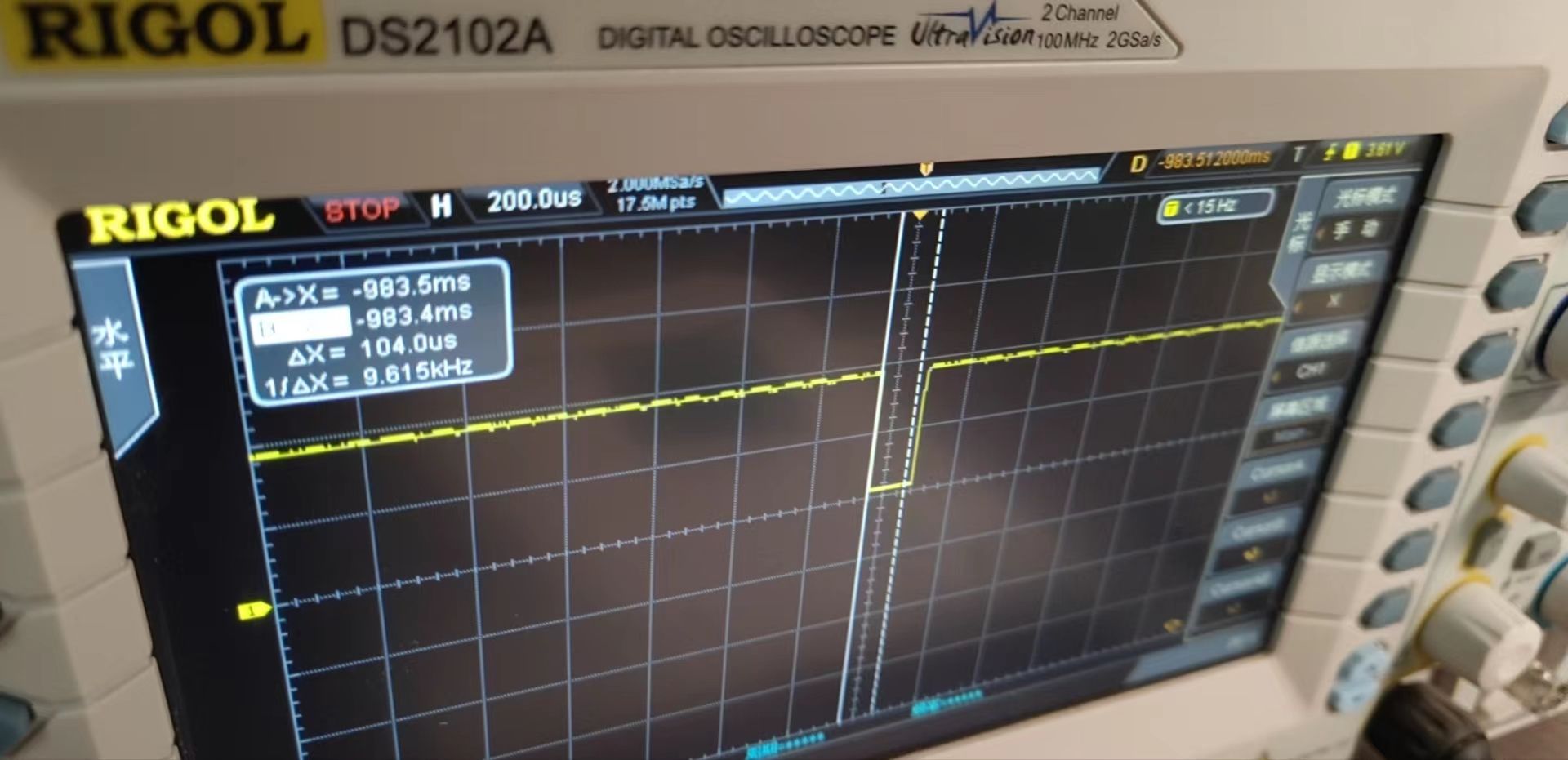
@woodcat 并且我发现 CHARGE 管脚输出频率 1HZ 的方波,并且低电平时间大概在10us。这是不是供电电流不足啊?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat 在 AXP2101 DCDC1 输出异常,上电会闪烁一下 中说:
了才能继续看后面的usb识别了,查查供电 焊接啥的
我发现 AXP2101 的 charge 灯在微微闪烁(仔细看可以看出来),这个是什么情况呢?

-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat 今天测试了下 V853 的 G1 和 H1 对应的晶振 XIN 和 XOUT,也是有 24Mhz 的波形的。
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat 完全没有
并且接上 USB 转 TTL 的 GND TX RX 三根线,然后再接到 USB 的时候无法点亮电源灯。即先 TX 和 RX 接到 USB 转 TTL ,然后再接 USB 口无法点亮电源灯。两者同时接到一个 USB 扩展坞上然后将扩展坞接到电脑上才有可能点亮电源灯,但是还是无输出。
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@woodcat 那感觉问题还是在 V853 那端,现在的现象可能是这个芯片没有正常工作,所以也没有修改 DCDC4 的输出,并且无法正常被识别?请问 影响识别 V853 的除了供电,晶振还有其他可能的原因么?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@iysheng 我仔细看了我的原理图,DDR的供电选的是DCDC4输出的1.1V,但是我选择的SDRAM型号DDR供电是1.5V+-0.0075V,请问是不是DDR不能正常工作就无法识别设备呢?
-
回复: AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
@iysheng
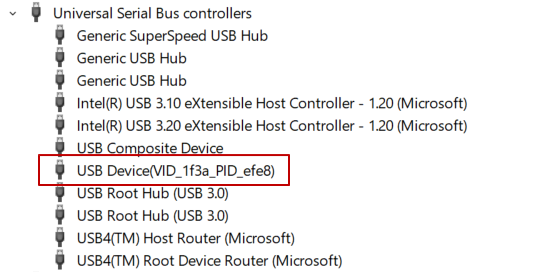
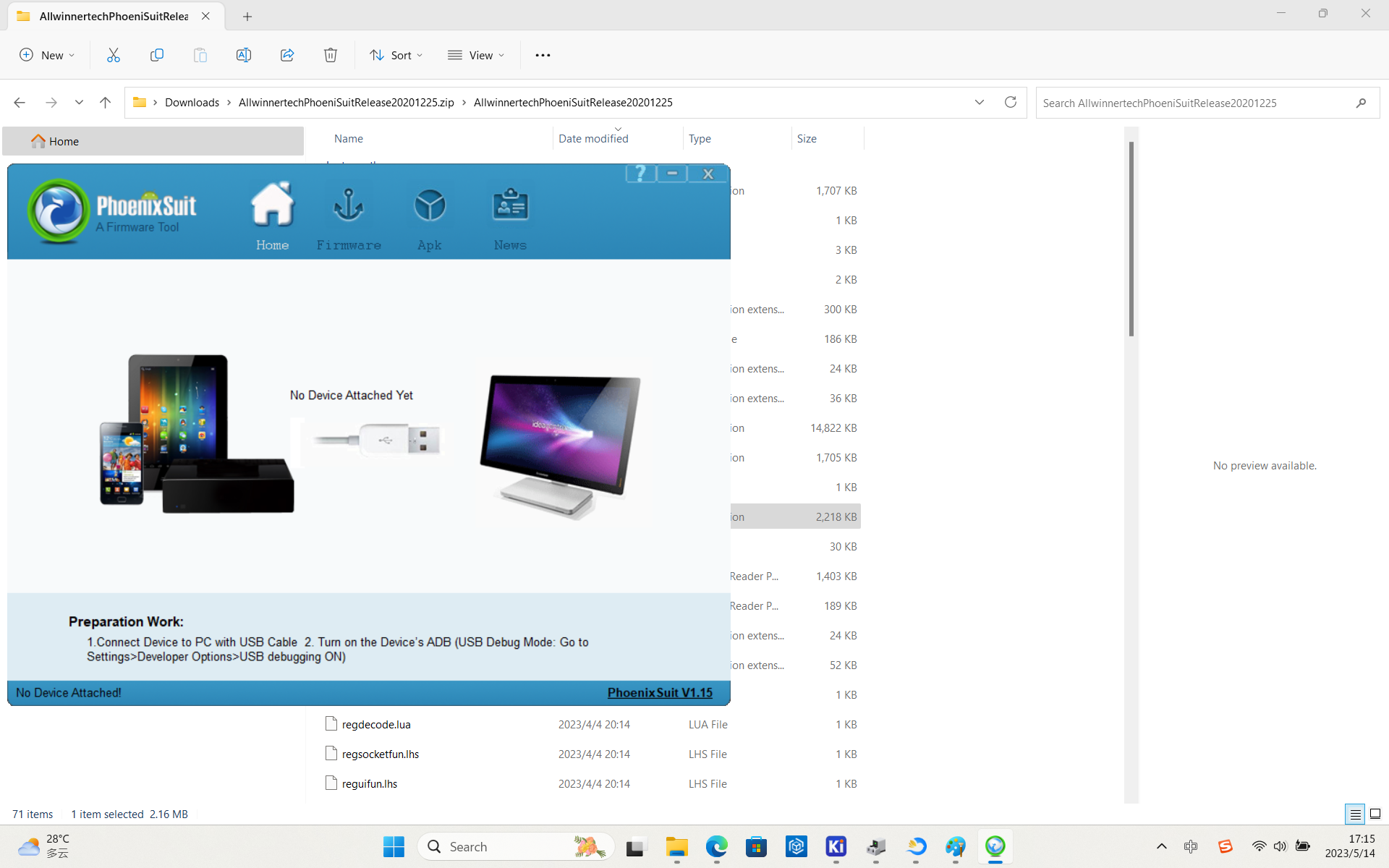
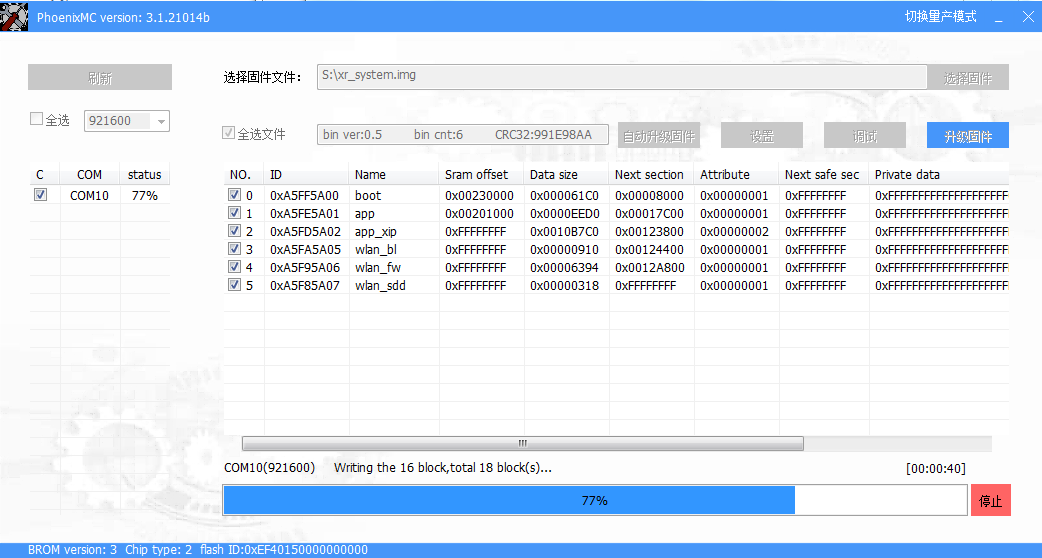
调试发现,是好多电感和电阻没有焊接导致 AXP2101 的输出不能正常给到 V853,补焊之后,DCDC1 可以持续输出3.3v,相关的 CPU
电压 0.9v,ddr 涉及到的电压 1.8v, 1.1v 输出也有,但是还是无法识别到设备,不过在设备管理器中可以看到设备。如下图所示:
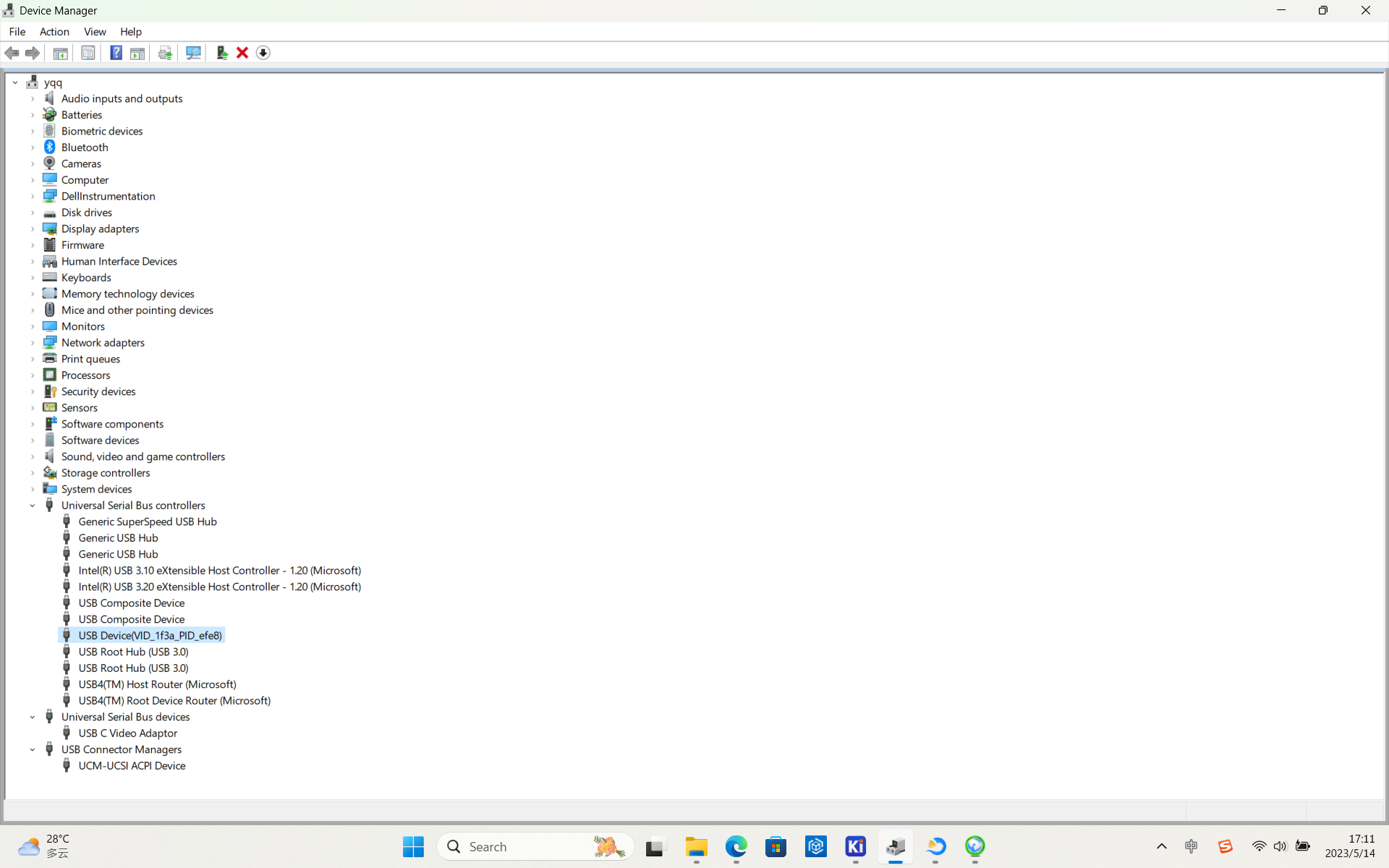
phoenixsuit 上位机却无法检测到这个设备:
我这边使用的micro usb 接口,相关的 USB-ID 管脚是悬空状态,请问和这个管脚有关系么?换句话说是 V853 对应管脚 W23 也是悬空的,请问会导致不识别 v853 的板子么?
-
AXP2101 DCDC1 输出异常,上电会闪烁一下发布在 V Series
我自己参考 V853 的设计电路设计的板子,目前通过 USB 供电发现 AXP2101 输出供电异常,对应的 DCDC1 关联的 LED 输出只会闪一下,然后就灭了。相关的原理图我截图如下:
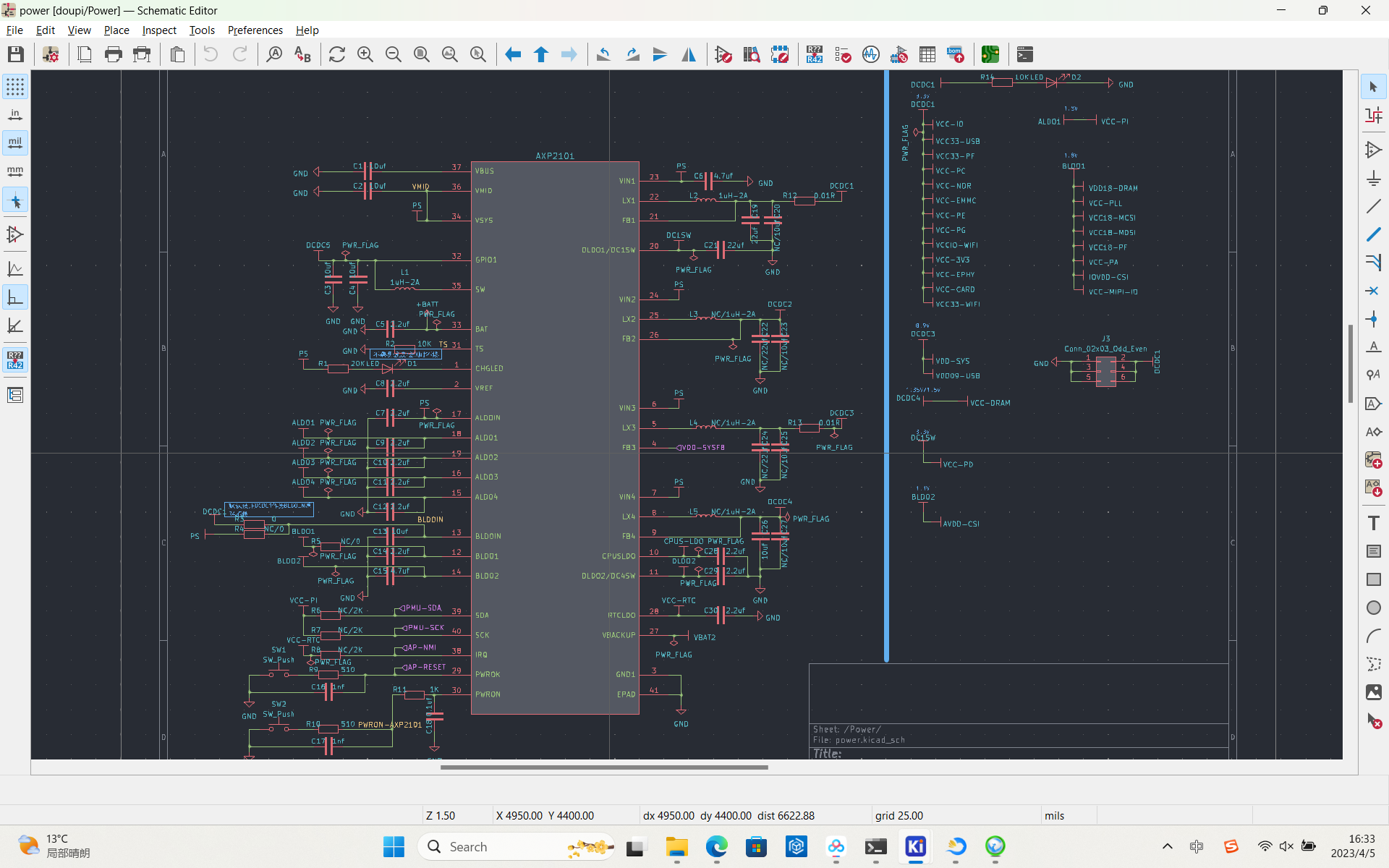
请问可能是什么原因呢?备注:电压表测试了,AXP2101 37 号 VBUS 管教有 5V 电压。
-
【XR806开发板试用】 E-Link Board 👉 screen_app 开发发布在 Wireless & Analog Series
解决的问题:为了改善在家做月子时候,家人希望时不时地进屋里看小孩,但是如果这时候小孩子在睡觉,或者妈妈在哺乳,如果贸然地进来是不是很不礼貌,纵使是敲门,这时候会不会吵到小孩子呢。如果有一个小看板可以放在客厅或者门口位置,孩子妈妈可以通过手机遥控修改看板上的内容,及时更新小孩子的状态,是不是可以减少贸然的尴尬呢?
实现的方法:针对上述问题,我基于 XR806 设计了一款比较小巧的母婴看板设备。这个设备支持手机通过微信连连遥控看板的内容,及时更新小孩子的状态。
这个设备外观是这样的:

这张图片显示的图标是我使用到的一些软件的 logo。对了,还有我的微信头像。嘿嘿。这些和母婴看板有什么关系呢?
再看一张截图:
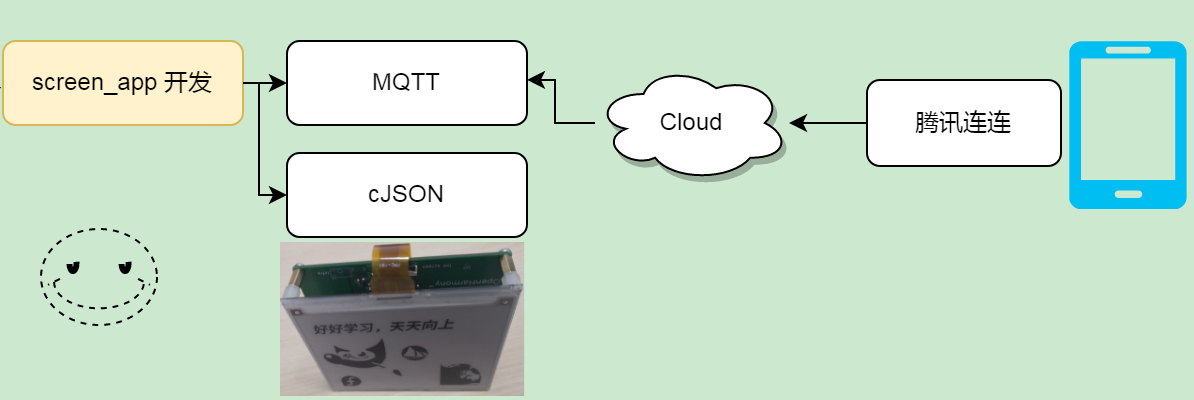
这张图,描述了整个母婴看板设备的层次图。XR806 通过 mqtt 连接腾讯云,此处要感谢@mocul ,参考了他的教程,少走了一些弯路。此外,重点还参考了如下几个文件:
- device/xradio/xr806/xr_skylark/project/example/mqtt/main.c
- device/xradio/xr806/xr_skylark/project/example/wlan/main.c
- device/xradio/xr806/xr_skylark/src/cjson/json_test.c
- device/xradio/xr806/xr_skylark/project/common/cmd/cmd_json.c
分别实现了 MQTT 的移植以及 cJSON 格式数据解析
特别地,通过参考
wlan/main.c文件,实现了上电自动连接热点的功能。通过腾讯云注册了一个设备:
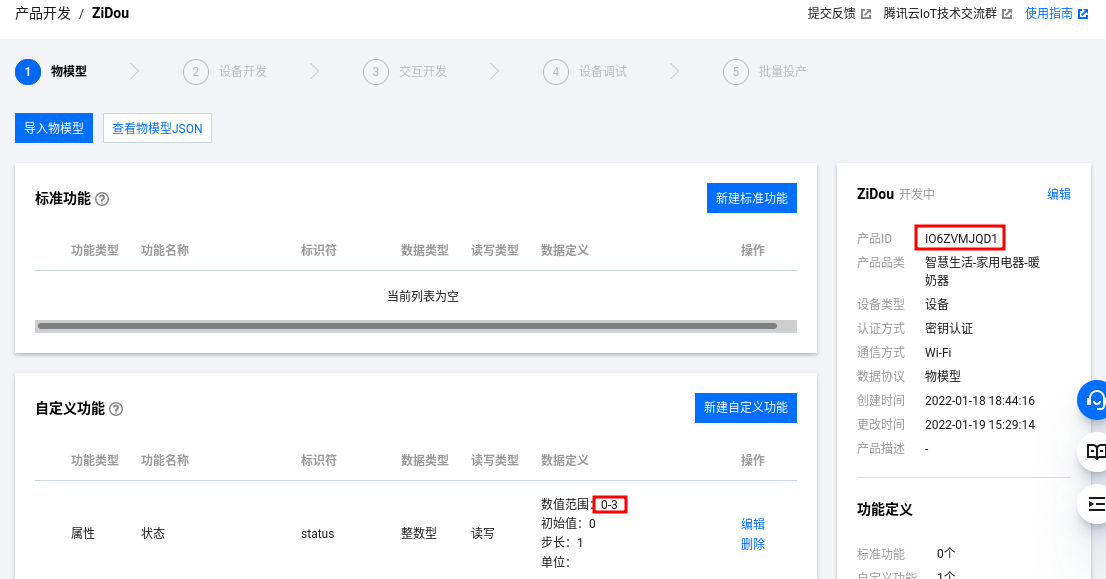
有了这个设备,本来想尝试开发下腾讯连连 H5 面板呢,但是着实基础薄弱,不知道从何处着手看代码,只能偷懒直接拿着 demo 例程来用了。具体的 demo 在https://github.com/tencentyun/iotexplorer-h5-panel-demo。
直接编译出来 js 和 css,上传到腾讯云自定义面板处:
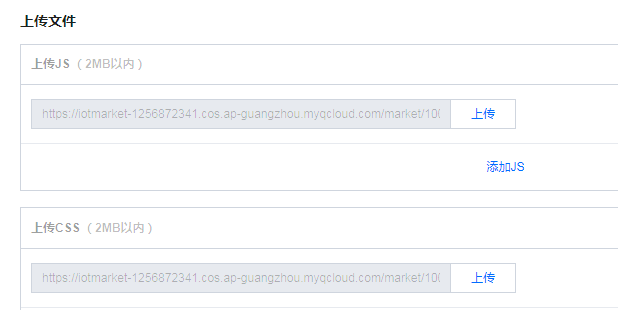
最后的效果是这样的:

整个项目的代码在 gitee 上,https://gitee.com/iysheng/devboard_device_allwinner_xr806.git
其中 notes 分支记录了整个项目的代码开发过程。为了更好的展示效果,我录制了一个小视频放在了 bilibili。效果的链接。
-
【XR806开发板试用】 E-Link Board 👉 基础开发发布在 Wireless & Analog Series
E-Link指定的就是墨水显示屏。在这次试用 XR806 开发板的过程中,我计划是开发一款工作看板设备。放在办公桌旁边,可以同步更新并显示每天的工作计划,起到试试提醒自己好好工作 的目的。暂且叫这个项目E-Link Board了。这次算是第一次近距离的使用鸿蒙系统。所以也是怀着学习新知识的心态在进行这个项目。针对这个项目,涉及到了两个仓库:
这篇文章描述针对这个项目做的基础开发工作,包括如下几点:
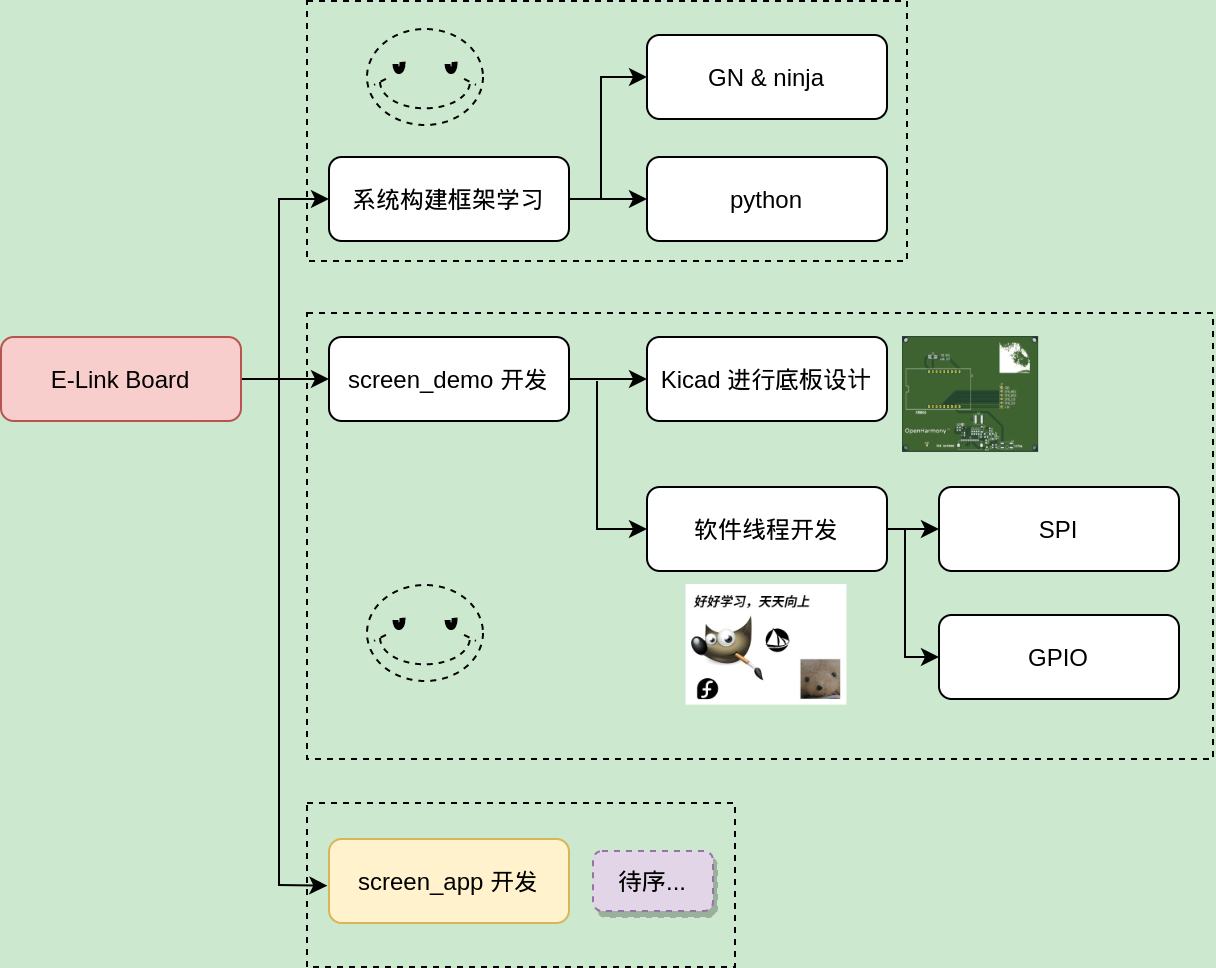
- 在系统框架学习章节,输出了一点内容現在的工程是如何生成 xr_system.img。
- 在
screen_demo开发部分,涉及到了用 Kicad 对底板进行硬件设计、线程和屏幕驱动开发,具体的描述内容可以参看如下两篇内容:
-
回复: hal_rtc相关函数实现,只找到函数定义发布在 Wireless & Analog Series
@zhugx 在 hal_rtc相关函数实现,只找到函数定义 中说:
HAL_RTC_SetDDHHMMSS
可以在 Linux 下使用 grep 搜索看看。
▸ grep "HAL_RTC_SetDDHHMMSS" -nr device/xradio/xr806/ device/xradio/xr806/xr_skylark/include/driver/chip/hal_rtc.h:222:void HAL_RTC_SetDDHHMMSS(RTC_WeekDay wday, uint8_t hour, uint8_t minute, uint8_t second); device/xradio/xr806/xr_skylark/lib/xradio_v2/rom_symbol.ld:440:HAL_RTC_SetDDHHMMSS = 0xdad5; device/xradio/xr806/xr_skylark/lib/xradio_v3/rom_symbol.ld:496:HAL_RTC_SetDDHHMMSS = 0x14159; device/xradio/xr806/xr_skylark/project/bootloader/gcc/.project.ld:494:HAL_RTC_SetDDHHMMSS = 0x14159; grep: device/xradio/xr806/xr_skylark/project/bootloader/gcc/bootloader.elf: binary file matches device/xradio/xr806/xr_skylark/project/bootloader/gcc/bootloader.map:3513: 0x0000000000014159 HAL_RTC_SetDDHHMMSS = 0x14159 device/xradio/xr806/xr_skylark/project/common/cmd/cmd_rtc.c:122: HAL_RTC_SetDDHHMMSS(CMD_WDAY_TM2RTC(t.tm_wday), t.tm_hour, t.tm_min, t.tm_sec); grep: device/xradio/xr806/xr_skylark/project/common/cmd/cmd_rtc.o: binary file matches device/xradio/xr806/xr_skylark/project/demo/audio_demo/gcc/audio_demo.map:16368: 0x0000000000014159 HAL_RTC_SetDDHHMMSS = 0x14159 device/xradio/xr806/xr_skylark/project/demo/audio_demo/gcc/audio_demo.map:38722:HAL_RTC_SetDDHHMMSS ../../../../project/common/cmd/cmd_rtc.o device/xradio/xr806/xr_skylark/project/demo/audio_demo/gcc/.project.ld:497:HAL_RTC_SetDDHHMMSS = 0x14159; grep: device/xradio/xr806/xr_skylark/project/demo/audio_demo/gcc/audio_demo.elf: binary file matches device/xradio/xr806/xr_skylark/project/example/rtc/main.c:39:#define RTC_SET_DDHHMMSS(wday, hour, minute, second) HAL_RTC_SetDDHHMMSS(wday, hour, minute, second) device/xradio/xr806/xr_skylark/src/rom/rom_bin/out/rom.csv:343:'0000dad4,'00000060,'T,'HAL_RTC_SetDDHHMMSS device/xradio/xr806/xr_skylark/src/rom/rom_bin/src/driver/chip/hal_rtc.c:245:void HAL_RTC_SetDDHHMMSS(RTC_WeekDay wday, uint8_t hour, uint8_t minute, uint8_t second) device/xradio/xr806/xr_skylark/tags:15405:HAL_RTC_SetDDHHMMSS src/rom/rom_bin/src/driver/chip/hal_rtc.c /^void HAL_RTC_SetDDHHMMSS(RTC_WeekDay wday, uint8_t hour, uint8_t minute, uint8_t second)$/;" f device/xradio/xr806/xr_skylark/out/audio_demo.map:16368: 0x0000000000014159 HAL_RTC_SetDDHHMMSS = 0x14159 device/xradio/xr806/xr_skylark/out/audio_demo.map:38722:HAL_RTC_SetDDHHMMSS ../../../../project/common/cmd/cmd_rtc.o具体的你可以看下文件
device/xraddevice/xradio/xr806/xr_skylark/src/rom/rom_bin/src/driver/chip/hal_rtc.c这里有这些函数定义。
-
回复: 求助,编译wifi模块时遇到问题发布在 Wireless & Analog Series
@xisecret 這個是 Makefile 構建的語法啊,就是說 build 這個目標在構建的過程中,
- 依賴 __build
- 第一次構建 __build 的時候 sdk_cfg_rdy 爲 n 時,會依賴 include/generated/autoconf.h 頭文件,
- 第二次構建 __build 這個目標的時候,就依賴 all 和 image 這兩個目標了
- 接下來就會去找 all 和 image 這兩個木碧歐啊的依賴
針對你這個問題,我今天放開了部分代碼,查看初步打印和你這個問題有點像,通過查看
out/xr806/wifi_skylark/error.log文件,發現是 app_xip.bin 太大了,導致生成 image 的時候出問題了,通過make menuconfig取消了部分內容,讓生成的app_xip.bin文件大小降低下來就可以了。還是建議你看下出問題時的
error.log文件,具體原因具體分析。
-
回复: 求助,编译wifi模块时遇到问题发布在 Wireless & Analog Series
根據打印,看下你的
out/xr806/wifi_skylark/error.log有沒有什麼有用信息呢?
-
回复: 請教現在的工程是如何生成 xr_system.img 的?发布在 Wireless & Analog Series
最近幾天學習了構建的過程,再次記錄描述一下。
該文件記錄 XR806 工程的編譯過程
涉及到的組件
* [GN](https://gn.googlesource.com/gn/+/main/docs/reference.md) * [ninja](https://ninja-build.org/)編譯命令
階段一: 配置以及編譯扳機的原生靜態庫
cd device/xradio/xr806/xr_skylark切換到處理器層級目錄cp project/demo/audio_demo/gcc/defconfig .config複製 demo 工程的配置文件make menuconfig;make build_clean根據 demo 配置工程,並進行工程清理, 實際的目標定義在 project/prject.mk 文件中- <a id='SDKconfig'>配置工程</a>,生成 ../liteos_m/SDKconfig.gni 文件,
這一步很重要
特別地在 python config.py 過程中會根據 .config 文件生成 ../liteos_m/SDKconfig.gni 文件,這個文件在後續構建鴻蒙的時候會用到.menuconfig: mconf $< ./Kconfig python config.py
2.# 在文件 gcc/Makefile 中定義的 ROOT_PATH # 絕對路徑 device/xradio/xr806/xr_skylark 是處理器級別的 ROOT_PATH := ../../../.. build_clean: clean lib_clean lib_install_clean -$(Q)-rm -rf $(ROOT_PATH)/out/* # 刪除編譯的工程文件 clean: $(Q)-rm -f $(PROJECT_LD) $(PROJECT).* *.bin $(OBJS) $(DEPS) $(Q)-rm -rf $(ROOT_PATH)/out/* lib_clean: # 進入到 **src** 目錄執行對應的清除動作 $(Q)$(MAKE) $(S) -C $(ROOT_PATH)/src clean lib_install_clean: $(Q)$(MAKE) $(S) -C $(ROOT_PATH)/src install_clean- <a id='SDKconfig'>配置工程</a>,生成 ../liteos_m/SDKconfig.gni 文件,
make lib -j編譯設備層級的 lib 文件,这些 lib 文件在当前处理器级别的 src 目录,并且会将这些 .a 文件复制到当前处理器界别的 lib 目录。lib: __lib # 根據 .config 生成對應的 autoconf.h 頭文件 # 執行的命令是 $(CONF) --syncconfig $(Kconfig) 文件就可以生成 include/generated/autoconf.h 頭文件 include/generated/autoconf.h: $(Q)cd $(ROOT_PATH); $(MAKE) prj=$(PRJ_PARENT_DIR)/$(PROJECT) $@; cd - ifeq ($(sdk_cfg_rdy), y) # 第二次開始編譯庫並執行對應 src 目錄的 Makefile __lib: # 执行 src 目录的 Makefile $(Q)$(MAKE) $(S) -C $(ROOT_PATH)/src install else # 第一次生成頭文件 __lib: include/generated/autoconf.h $(Q)$(MAKE) $(S) $@ sdk_cfg_rdy=y endif install: $(Q)$(MAKE) _install TARGET=install _install: $(SUBDIRS) # 分别去对应当的 SUBDIRS 中执行 install $(SUBDIRS): $(Q)$(MAKE) $(S) -C $@ $(TARGET) # 以 src/console/ 目錄下的 Makefile 爲例 # 编译 lib 的目标就是 install, 該目標定義在 src/lib.mk 文件中 # 如果没有特殊指定,那么 lib 的安装目录文件在處理器級別的 lib/ 目录 INSTALL_PATH ?= $(ROOT_PATH)/lib install: $(LIBS) # 将生成的 .a 库文件移动到指定的目录 $(Q)$(CP) -t $(INSTALL_PATH) $^
階段二: 配置鴻蒙系統
cd -进入到整个鸿蒙工程的根目录hb set调用 hb 工具的 set 参数。 hb 是鸿蒙构建写的一个 python 工具集合,这个工具的源码在 XR806 这个鸿蒙的工程中 build/lite/hb 目录。 里面 main.py 文件的 main() 函数是这个工具的入口函数。- 针对 set 参数,会 import hb.set.set module, 执行该模块的 exec_command 函数
- hb.set.set 模块的 exec_command 函数会提示配置 product 目录。配置完成后,会配置 hb 的唯一的 config 对象(Config 类的单例模式). 关键的的内容为(以选择 wifi_skylark@xradio 为例子):
- config.product = wifi_skylark
- config.product_path = vendor/xradio/xr806
- config.board config.kernel config.kernel_version config.dev_company 都是从 config.product 目录的 config.json 文件中获取的参数信息
- config.device_path = device/xradio/xr806/liteos_m
这个路径比较重要!!!
階段三: 編譯鴻蒙系統
hb build -f -c gcc, 備註,因爲我使用的是 gcc 工具鏈,所以額外添加了參數 -c gcc. 執行的 hb.build.build 的 exec_command 函數. 這個是入口,該函數在文件 build/lite/build/build.py 中定義。特別地,在加載對應 module 的時候,會首先執行對應 module 的 add_options 函數,添加針對這個 module 的參數列表,下面步驟截取關鍵的內容展開描述:- build.register_args('ohos_build_type', args.build_type[0]) # 如果沒有 -b 指定編譯類型,默認是 debug, 設置 build 對象的 ohos_build_type 爲 debug
- build.compiler = args.compiler[0] # 如果通過 -c 選項指定了編譯器類型,那麼會使用新的編譯器類型複製給 build 對象的 compiler 參數
- 如果帶有 -f 選項, args.full = true
- return build.build(args.full, cmd_args=cmd_args) 執行 build 構建過程,在文件 build/build_process.py 文件中定義
- self.check_in_device()
- 使用階段二配置的鴻蒙工程參數,設置 build 對象的 product_path,device_path,ohos_kernel_type
- 設置全局的 config 的 out_path 爲鴻蒙工程根目錄/out/${board}/${product} 目錄
- 將 product_path 的 config.json 文件內容相關的參數列表,添加到 build 對象的 args_list 參數列表
- cmd_list = self.get_cmd(full_compile, ninja) -> self.get_cmd(True, True)
- return [self.gn_build, self.ninja_build] 執行 build 對象的 gb_build 和 ninja_build
- gn_build -> gn_path gen out/${board}/${product} --root=鴻蒙的根目錄 --dotfile=鴻蒙的根路徑/build/lite/.gn --script-executable=python3 --args=參數列表
- ninja_build -> ninja_path -w dupbuild=warn -C out/${board}${product} + ninja_args
特別地,因爲在整個編譯過程中不是執行編譯腳本,而是通過 hb.common.utils 工具的 exec_command 函數調用的這些動作,這個函數的一個重要作用是實現了輸出的重定向, 將編譯的過程輸出重定向到了文件中. 不管是 gn_build 還是 ninja_build 都是將這些編譯日志信息重定向到了文件 out/${board}/${product}/build.log 中.
# 這裏對輸出進行了重定向, 講具體的編譯過程重定向到指定的文件中 def exec_command(cmd, log_path='out/build.log', **kwargs): ... - return [self.gn_build, self.ninja_build] 執行 build 對象的 gb_build 和 ninja_build
- self.check_in_device()
階段四:執行構建生成 img 文件
經過前三個命令後就可以在 product 級別的 out 目錄
device/xradio/xr806/xr_skylark/out/中找到生成的xr_system.img文件了,具體這個文件是怎麼生成的呢。這個階段對階段三的 gn 構建部分進行展開闡述。- gn gen out/xradio/xr806 --root=. --dotfile=build/lite/.gn 參數列表
- --root 參數指定了 gn 構建的根目錄
- --dotfile 參數明確指定了構建的 .gn 文件, 默認會在 root 目錄查找 .gn 文件, 特別地 .gn 文件也會定義 root 變量,確定 gn 構建的根目錄. build/lite/.gn 文件內容是:
build/lite/config/BUILDCONFIG.gn 文件內容是:# The location of the build configuration file. # gn build 的 config 文件 buildconfig = "//build/lite/config/BUILDCONFIG.gn" # The source root location. # 重新定義了構建的 root 目錄 root = "//build/lite"
device/xradio/xr806/liteos_m/config.gni 文件內容是,涉及到 SDKconfig.gni 文件生成:import("//build/lite/ohos_var.gni") import("${device_path}/config.gni") -> import("//device/xradio/xr806/liteos_m/config.gni") ...
device/xradio/xr806/liteos_m/SDKconfig.gni 文件內容是:import("//device/xradio/xr806/liteos_m/SDKconfig.gni") -> 這個文件是在階段一配置過程中生成的 ... # Board related headfiles search path. SDKpath = "//device/xradio/xr806" -> 定義了 SDK 的路徑 ... board_include_dirs += [ ... "${SDKpath}/xr_skylark/project/${ProjectPath}", 添加工程路徑用來搜索頭文件 ... ] ...
到此,gn 的 config 過程暫時告一段落, 主要就是配置了一些環境變量、編譯選項等內容。下一步就是真正的構建了.因爲 root_path 是 //build/lite, 構建會去該目錄查找 BUILD.gn 文件.... ProjectPath = "demo/audio_demo" -> 定義了變量 ProjectPath ...
//build/lite/BUILD.gn 文件內容是:
以上內容將需要構建的依賴都包含 deps 中了,最終生成的 xr_system.img 的入口還是 ${device_path}/../ 這個依賴,下面進行詳細闡述。# 定义了 ohos 这个组 group("ohos") { deps = [] # 默認這裏爲空 if (ohos_build_target == "") { # Step 1: Read product configuration profile. # 讀取 product_path 目錄下的 json 配置文件 # product 級別 vendor/xradio/xr806 目錄下的 config.json 文件 product_cfg = read_file("${product_path}/config.json", "json") # kernel 是 product_cfg 文件配置的類型 liteos_m kernel = product_cfg.kernel_type # Step 2: Loop subsystems configured by product. # 遍歷 config.json 文件中定義的所有的 subsystems foreach(product_configed_subsystem, product_cfg.subsystems) { subsystem_name = product_configed_subsystem.subsystem subsystem_info = { } # Step 3: Read OS subsystems profile. # 根據對應的的 subsystem, 讀取 components 對應目錄的 json 配置文件 # subsystem 對應的配置文件保存在 //build/lite/components 目錄, 讀取對應名稱的 json 配置文件 subsystem_info = read_file("//build/lite/components/${subsystem_name}.json", "json") # Step 4: Loop components configured by product. # 遍歷具體的 subsystem 的 components 組件 foreach(product_configed_component, product_configed_subsystem.components) { # Step 5: Check whether the component configured by product is exist. # 查找是否找到了對應的 component, 如果至少找到一個就複製 component_found 爲 true component_found = false foreach(system_component, subsystem_info.components) { if (product_configed_component.component == system_component.component) { component_found = true } } # 如果沒有找到那麼斷言錯誤 assert( component_found, "Component \"${product_configed_component.component}\" not found" + ", please check your product configuration.") # Step 6: Loop OS components and check validity of product configuration. # 如果在對應的 subsystem 的 json 配置文件中找到了對應的定義的 component 組件 # 繼續從頭遍歷該 subsystem foreach(component, subsystem_info.components) { kernel_valid = false board_valid = false # Step 6.1: Skip component which not configured by product. # 如果找到了這個 component if (component.component == product_configed_component.component) { # Step 6.1.1: Loop OS components adapted kernel type. # kernel 根據 product 的 json 配置文件已經初始化爲 liteos_m # 遍歷這個 subsystem 的 component 的所有 adapted_kernel 配置參數 # 如果這個 component 已經適配了指定的 kernel 類型。 表示 component 有效 foreach(component_adapted_kernel, component.adapted_kernel) { # 如果有定義的 kernel 類型,表示匹配,並且該 kernel 類型有效 if (component_adapted_kernel == kernel && kernel_valid == false) { kernel_valid = true } } # 如果該組件沒有適配指定的內核類型,那麼打印錯誤信息 assert( kernel_valid, "Invalid component configed, ${subsystem_name}:${product_configed_component.component} " + "not available for kernel: $kernel!") # Step 6.1.2: Add valid component for compiling. # 將該 component 的 targets 添加到 deps 依賴 foreach(component_target, component.targets) { deps += [ component_target ] } } } } } # Step 7: Add device and product target by default. # 添加設備和 product 的依賴 !!! 這裏是重點 # xr_system.img 文件生成靠的是依賴 ${device_path}/../ 路徑下的 BUILD.gn 文件 deps += [ "${device_path}/../", "${product_path}" ] } else { deps += string_split(ohos_build_target, "&&") } }
/device/xradio/xr806/liteos_m/../BUILD.gn 文件內容是:
上述文件通過... import("//build/lite/config/component/lite_component.gni") -> 定義了 build_ext_command 模板類 ... build_ext_component("libSDK") { exec_path = rebase_path(".", root_build_dir) -> 將當前目錄設置爲相對內置變量 root_build_dir 的相對路徑 outdir = rebase_path("$root_out_dir") -> 將 root_out_dir 設置爲相對系統絕對路徑的路徑格式,轉換到 ourdir 目錄 # 构建的命令, 模板類展開後會通過這個 build.sh 腳本完成 img 的構建 command = "./build.sh ${outdir}" deps = [ "//build/lite/:ohos", "//kernel/liteos_m:kernel", "os:liteos_glue", ] if (IsBootloader == "false") { deps += [ "adapter/hals:adapter", "adapter/console:app_console", "ohosdemo:ohosdemo" -> 這個是我測試自己添加的一個組件 ] } }build_ext_component引用了一個模板類,具體的定義在文件 //build/lite/config/component/lite_component.gni, 內容爲:
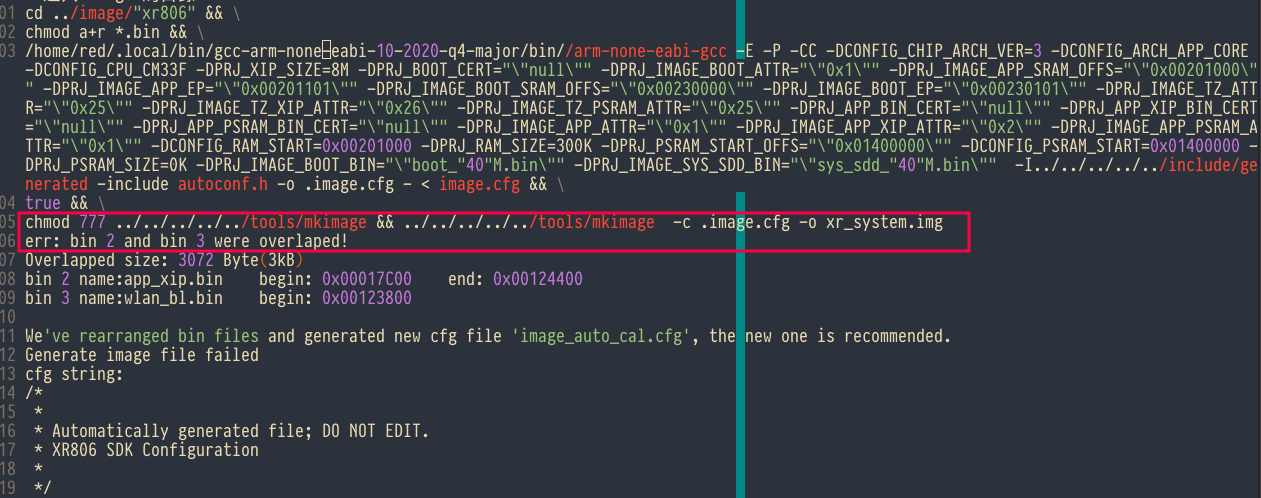
通過 ./build.sh 最終就可以生成 xr_system.img 文件了。最終的實現在 project/project.mk 文件中定義, 整個 Makefile 的入口是在 device/xradio/xr806/xr_skylark/Makefile。在此僅僅闡述最後生成 img 執行的動作,截取自文件 device/xradio/xr806/xr_skylark/project/project.mk。內容爲:# 定义了一个模板类 template("build_ext_component") { if (defined(invoker.version)) { print(invoker.version) } # 定義了同名的 action action(target_name) { ... -> 在這裏會調用到定義的 command 對象,執行 ./build.sh /系統絕對路徑/out/xr806/wifi_skylark } ... }cd $(IMAGE_PATH) && \ chmod a+r *.bin && \ $(Q)$(CC) -E -P -CC $(CC_SYMBOLS) -I$(ROOT_PATH)/../include/generated -include autoconf.h -o $(PROJECT_IMG_CFG) - < $(IMAGE_CFG) && \ $(SIGNPACK_GEN_CERT) && \ chmod 777 $(IMAGE_TOOL) && $(IMAGE_TOOL) $(IMAGE_TOOL_OPT) -c $(PROJECT_IMG_CFG) -o $(IMAGE_NAME).img # 講 project 中的 bin 文件複製到頂層目錄下的 out 目錄中 @test -d "$(ROOT_PATH)/out" || mkdir -p "$(ROOT_PATH)/out" $(Q)$(CP) -t $(ROOT_PATH)/out/ $(IMAGE_PATH)/*.bin $(IMAGE_PATH)/$(IMAGE_NAME).img *.map
-
回复: 编译 device/xradio/xr806/xr_skylark/project/example会有undefined reference to发布在 Wireless & Analog Series
@allzhi 看一下你的 device/xradio/xr806/xr_skylark/project/linker_script/gcc/appos.ld 文件有没有包含这个两个 .a 库文件,如果没有,添加一下再试试呢。
-
回复: XR806板子异常崩溃,无法重新下载固件的问题发布在 Wireless & Analog Series
@cszzlsw 估计是下载的系统有问题了,换了 windows7 莫名其妙 就好了。
-
回复: XR806板子异常崩溃,无法重新下载固件的问题发布在 Wireless & Analog Series
@cszzlsw 我是在 linux 下,斷接之後還是有錯誤信息。
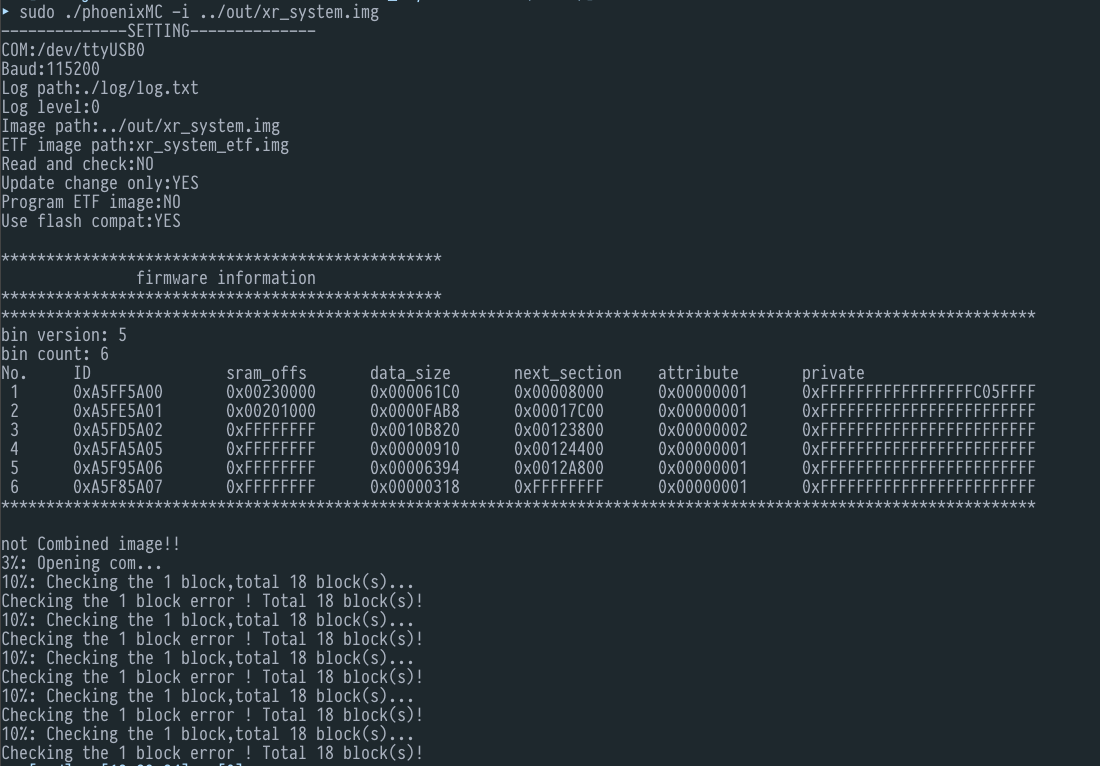
請問該如何解決啊?
-
請教現在的工程是如何生成 xr_system.img 的?发布在 Wireless & Analog Series
最近看了幾天的編譯構建,目前還是沒有搞清楚 xr_system.img 是如何編譯出來的?希望有懂的人可以指點一下。
-
【XR806开发板试用】1. 优化 console 打印提示发布在 Wireless & Analog Series
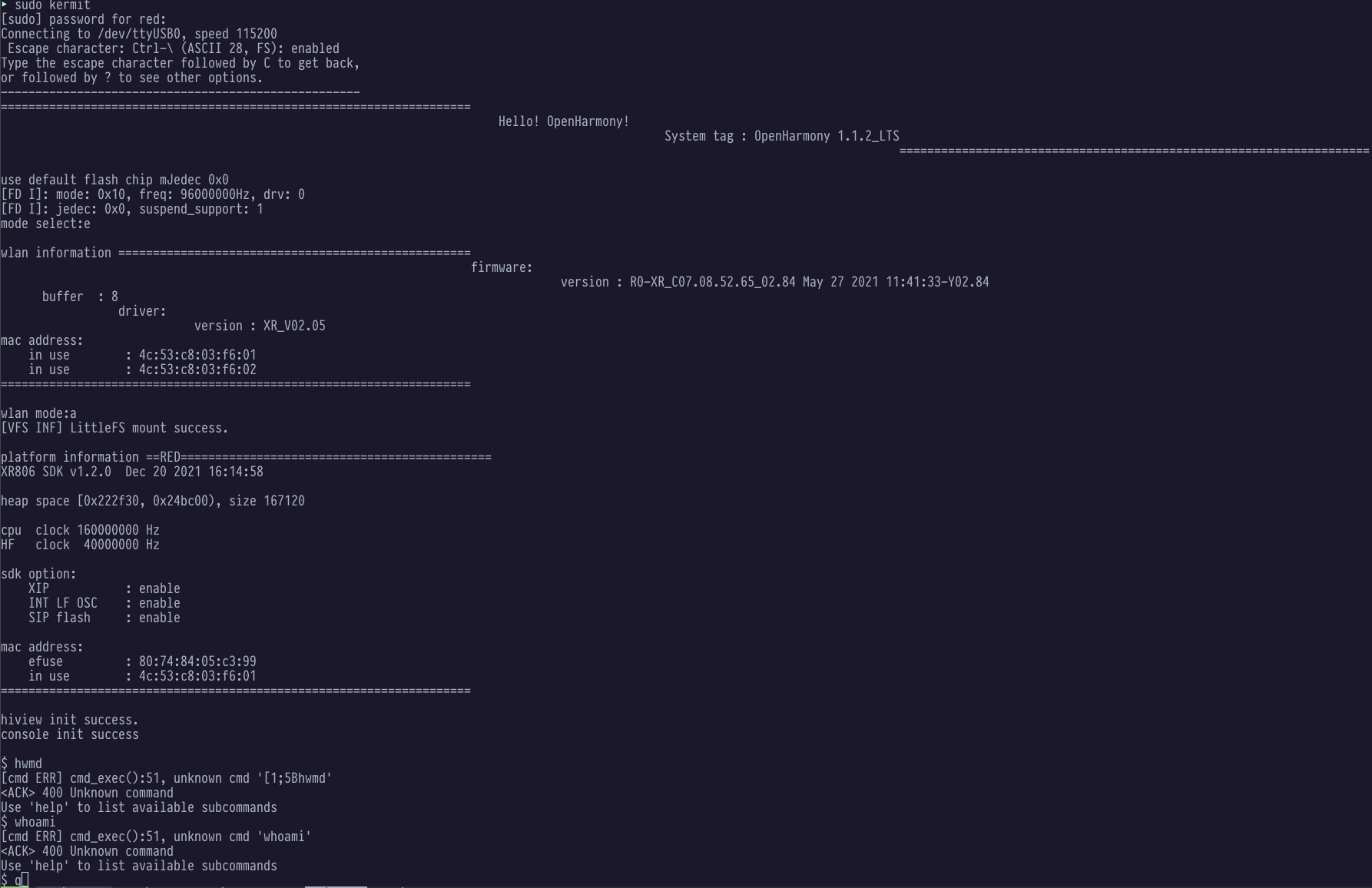
刚开始接触 XR806, 根据官方指导說明一步步将
wifi_skylarkdemo 編譯了出來,使用 ckermit 終端查看打印,發現很凌亂。具體效果是:
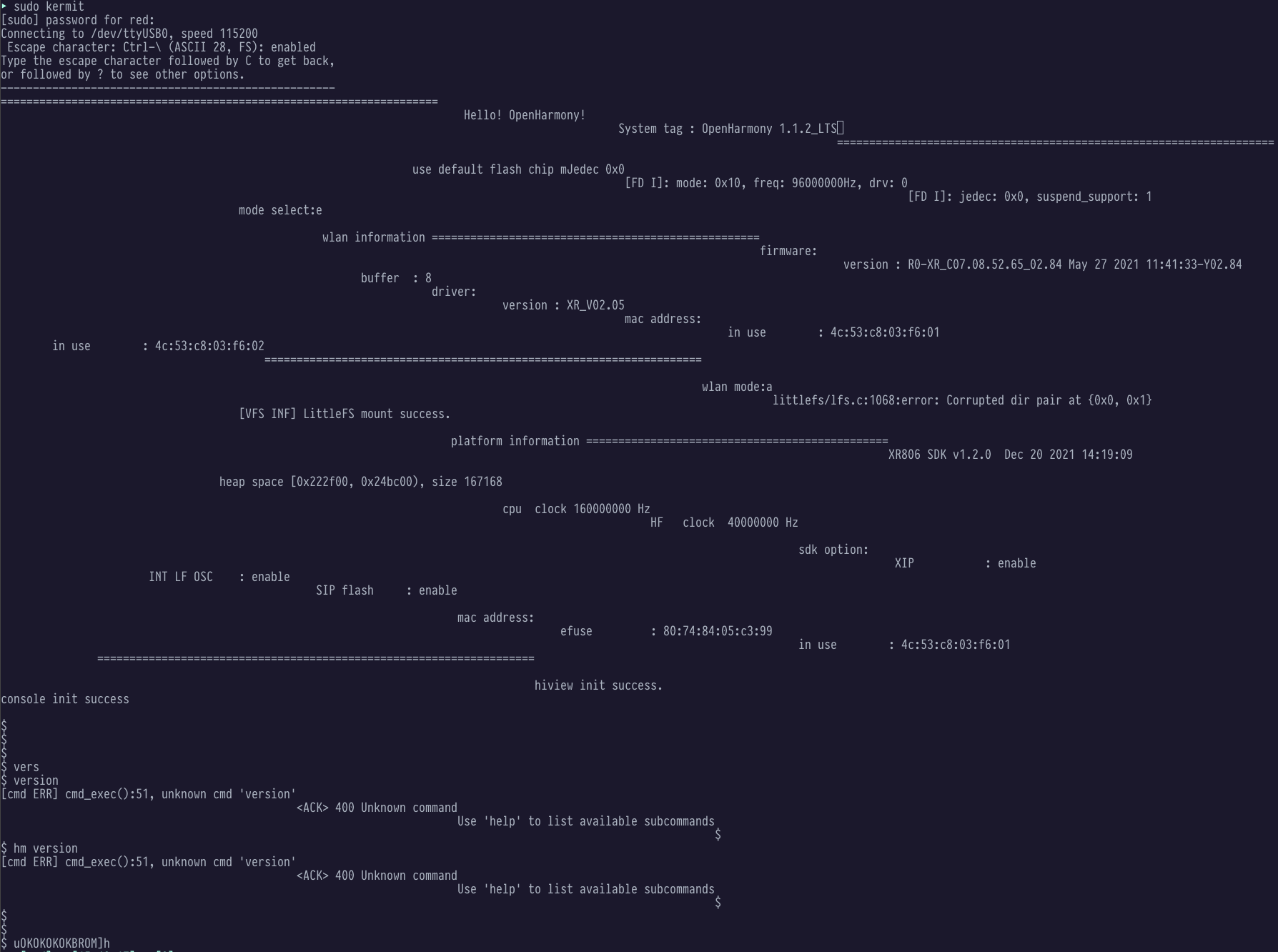
實在是不美觀,因爲之前碰到過類似的問題簡單來說就是沒有將 \n 識別出回車 \r 的效果。這種現象的解決方法有多種。
這次我選擇了修改putchar() 的方法。通過一步步的跟蹤代碼,發現 console 的基本流程是:int __wrap_putchar(int c) // stdio_set_write(stdout_write) board_uart_write()我修改的部分在 stdio_set_write 函數,具體是:
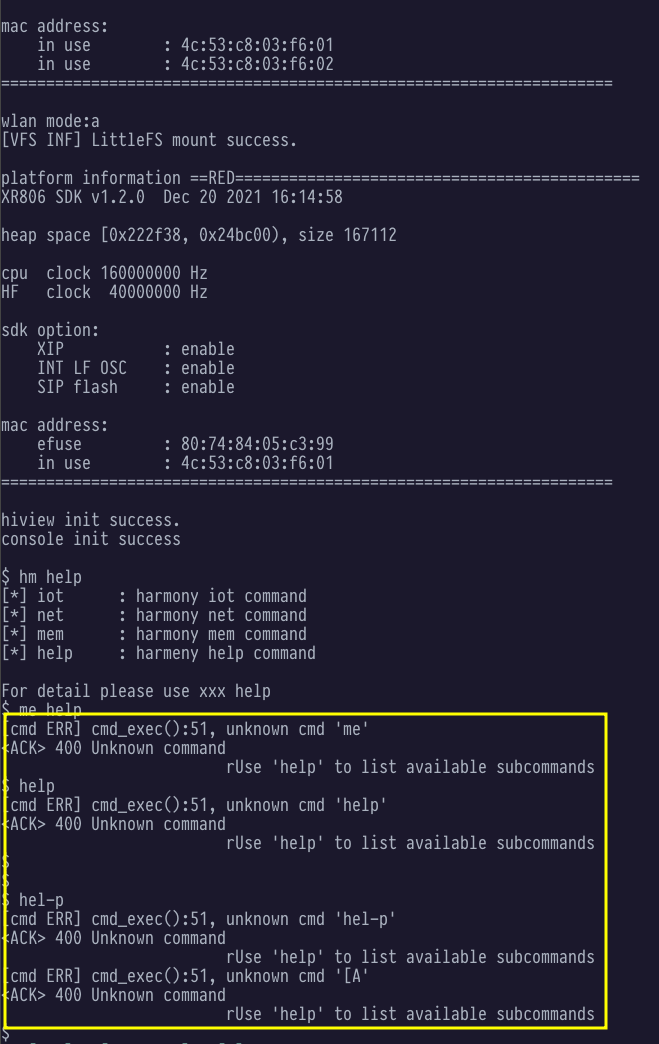
diff --git a/xr806/xr_skylark/project/common/startup/gcc/retarget_stdout.c b/xr806/xr_skylark/project/common/startup/gcc/retarget_stdout.c index 487c75b..9cd725f 100755 --- a/xr806/xr_skylark/project/common/startup/gcc/retarget_stdout.c +++ b/xr806/xr_skylark/project/common/startup/gcc/retarget_stdout.c @@ -175,7 +175,17 @@ static int stdout_write(const char *buf, int len) } #endif - return board_uart_write(g_stdout_uart_id, buf, len); + if (buf[len - 1] == '\n') + { + char r_ch[1] = {'\r'}; + int rlen = board_uart_write(g_stdout_uart_id, buf, len); + board_uart_write(g_stdout_uart_id, r_ch, 1); + return rlen; + } + else + { + return board_uart_write(g_stdout_uart_id, buf, len); + } }測試之後發現打印信息變成了這樣:
命令行的顯示效果還是會出現問題,繼續跟蹤代碼,修改部分:diff --git a/xr806/xr_skylark/src/console/console.c b/xr806/xr_skylark/src/console/console.c index 457ee23..72b5a0b 100755 --- a/xr806/xr_skylark/src/console/console.c +++ b/xr806/xr_skylark/src/console/console.c @@ -439,7 +439,16 @@ int console_write(uint8_t *buf, int32_t len) console_priv_t *console; console = &g_console; - return HAL_UART_Transmit_Poll(console->uart_id, buf, len); + if (buf[len - 1] == '\n') + { + uint8_t r_ch[1] = {'\r'}; + HAL_UART_Transmit_Poll(console->uart_id, buf, len); + return HAL_UART_Transmit_Poll(console->uart_id, r_ch, 1); + } + else + { + return HAL_UART_Transmit_Poll(console->uart_id, buf, len); + } } /**打上以上連個補丁後,console 的輸出就美觀多了。