一、系统概述
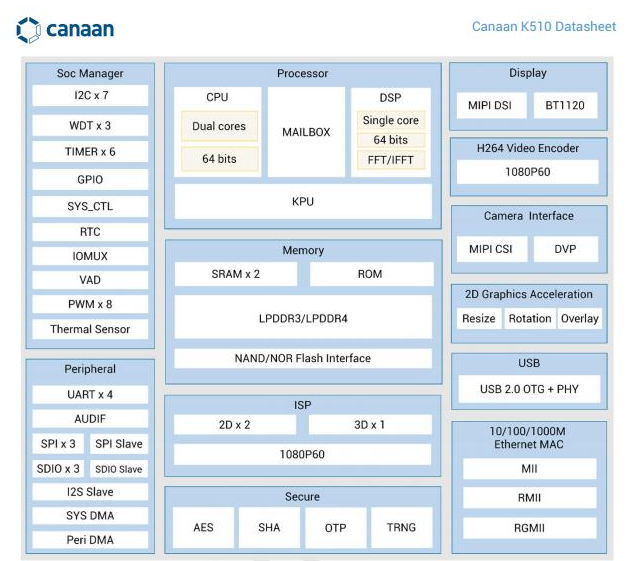
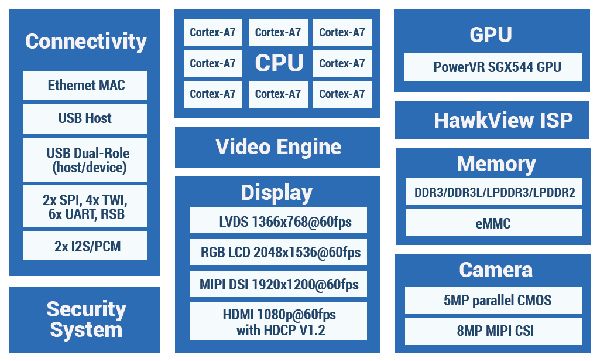
基于米尔-全志 T527设计一个简易的物联网网关,该网关能够管理多台MQTT设备,通过MQTT协议对设备进行读写操作,同时提供HTTP接口,允许用户通过HTTP协议与网关进行交互,并对设备进行读写操作。
二、系统架构
- 网关服务:基于FastAPI框架构建的Web服务,提供HTTP接口。
- MQTT客户端:负责与MQTT设备通信,管理设备连接、消息发布和订阅。
- 设备管理:维护一个设备列表,记录设备的基本信息和状态。
- 数据存储:使用内存或数据库存储设备数据,确保数据持久化。
三、组件设计
MQTT组件:
- 负责与MQTT broker建立连接。
- 订阅设备主题,接收设备发送的消息。
- 发布消息到设备,实现远程控制。
设备管理组件:
- 维护一个设备列表,记录设备的唯一标识符(如设备ID)、MQTT主题、连接状态等信息。
- 提供设备增删改查的方法。
HTTP组件:
- 基于FastAPI定义HTTP接口。
- 接收用户请求,调用MQTT组件和设备管理组件进行相应操作。
- 返回操作结果给用户。
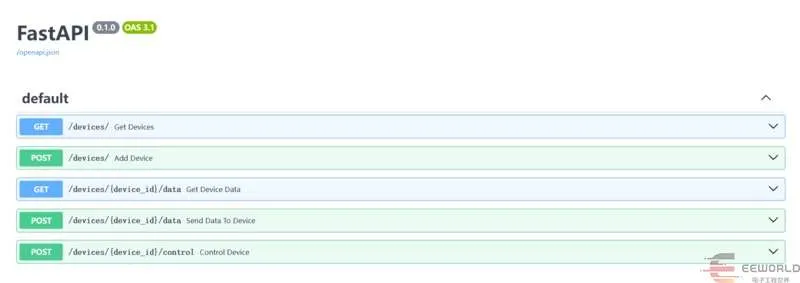
四、接口设计
设备列表:
- GET /devices:返回所有设备的列表。
- POST /devices:添加新设备到网关。
- DELETE /devices/{device_id}:从网关中删除指定设备。
设备详情:
- GET /devices/{device_id}:返回指定设备的详细信息。
设备数据:
- GET /devices/{device_id}/data:获取指定设备的最新数据。
- POST /devices/{device_id}/data:发送数据到指定设备。
设备控制:
P* OST /devices/{device_id}/control:发送控制命令到指定设备。
五、数据结构设计
设备信息:
- 设备ID (device_id):唯一标识设备的字符串。
- MQTT主题 (mqtt_topic):设备在MQTT broker上的主题。
- 连接状态 (connection_status):表示设备是否在线的布尔值。
- 其他设备属性(如名称、描述等)。
设备数据:
- 设备ID (device_id):关联设备信息的设备ID。
- 时间戳 (timestamp):数据发送或接收的时间。
- 数据内容 (data):设备发送或接收的具体数据,可以是JSON格式或* 其他格式。
六、安全性考虑
- 使用HTTPS协议提供安全的HTTP通信。
- 实现用户认证和授权机制,确保只有授权用户可以访问和操作设备。
- 对于敏感操作(如删除设备),要求用户进行二次确认或提供额外的安全措施。
七、部署与扩展
- 使用Docker容器化部署网关服务,便于管理和扩展。
- 根据需要,可以水平扩展网关实例以处理更多的设备连接和请求。
八、实现步骤
- 安装所需的Python库:fastapi, uvicorn, paho-mqtt等。
- 创建FastAPI应用并定义路由。
- 实现MQTT组件,包括与MQTT broker的连接、订阅、发布等功能。
- 实现设备管理组件,维护设备列表并提供增删改查的方法。
- 实现HTTP组件,调用MQTT组件和设备管理组件处理用户请求。
- 编写测试代码,验证网关的各项功能是否正常工作。
- 部署网关服务并监控其运行状态。
该设计方案仅仅是概述,具体实现细节可能需要根据实际需求和项目环境进行调整和优化。在实际开发中,还需要考虑异常处理、日志记录、性能优化等方面的问题。基于上述设计方案,以下是一个简化版的参考代码,展示了如何使用FastAPI和paho-mqtt库来创建一个物联网网关。需要注意,示例中不包含完整的错误处理、用户认证和授权机制,这些在实际生产环境中都是必不可少的。依赖的主要库版本:
fastapi==0.108.0
paho-mqtt==1.6.1
from fastapi import FastAPI, HTTPException, Body, status
from paho.mqtt.client import Client as MQTTClient
from typing import List, Dict, Any
import asyncio
import json
app = FastAPI()
mqtt_client = None
device_data = {}
subtopic="gateway/device/#"
# MQTT回调函数
def on_message(client, userdata, msg):
payload = msg.payload.decode()
topic = msg.topic
device_id = topic.split('/')[-1]
device_data[device_id] = payload
print(f"Received message from {device_id}: {payload}")
# MQTT连接和订阅
def mqtt_connect_and_subscribe(broker_url, broker_port):
global mqtt_client
mqtt_client = MQTTClient()
mqtt_client.on_message = on_message
mqtt_client.connect(broker_url, broker_port, 60)
mqtt_client.subscribe(subtopic)
mqtt_client.loop_start()
# MQTT发布消息
async def mqtt_publish(topic: str, message: str):
if mqtt_client is not None and mqtt_client.is_connected():
mqtt_client.publish(topic, message)
else:
print("MQTT client is not connected!")
# 设备管理:添加设备
@app.post("/devices/", status_code=status.HTTP_201_CREATED)
async def add_device(device_id: str):
device_data[device_id] = None
return {"message": f"Device {device_id} added"}
# 设备管理:获取设备列表
@app.get("/devices/")
async def get_devices():
return list(device_data.keys())
# 设备管理:获取设备数据
@app.get("/devices/{device_id}/data")
async def get_device_data(device_id: str):
if device_id not in device_data:
raise HTTPException(status_code=status.HTTP_404_NOT_FOUND, detail=f"Device {device_id} not found")
return device_data.get(device_id)
# 设备管理:发送数据到设备
@app.post("/devices/{device_id}/data")
async def send_data_to_device(device_id: str, data: Dict[str, Any] = Body(...)):
topic = f"devices/{device_id}"
message = json.dumps(data)
await mqtt_publish(topic, message)
return {"message": f"Data sent to {device_id}"}
# 设备控制:发送控制命令到设备
@app.post("/devices/{device_id}/control")
async def control_device(device_id: str, command: str):
topic = f"devices/device/{device_id}"
await mqtt_publish(topic, command)
return {"message": f"Control command sent to {device_id}"}
# FastAPI启动事件
@app.on_event("startup")
async def startup_event():
mqtt_connect_and_subscribe("127.0.0.1", 1883)
# FastAPI关闭事件
@app.on_event("shutdown")
async def shutdown_event():
if mqtt_client is not None:
mqtt_client.loop_stop()
mqtt_client.disconnect()
# 运行FastAPI应用
if __name__ == "__main__":
import uvicorn
uvicorn.run(app, host="127.0.0.1", port=8000)
设备1模拟代码 dev1.py:
import paho.mqtt.client as mqtt
# 连接成功回调
def on_connect(client, userdata, flags, rc):
print('Connected with result code '+str(rc))
client.subscribe('devices/1')
# 消息接收回调
def on_message(client, userdata, msg):
print(msg.topic+" "+str(msg.payload))
client.publish('gateway/device/1',payload=f'echo {msg.payload}',qos=0)
client = mqtt.Client()
# 指定回调函数
client.on_connect = on_connect
client.on_message = on_message
# 建立连接
client.connect('127.0.0.1', 1883)
# 发布消息
client.publish('gateway/device/1',payload='Hello, I am device',qos=0)
client.loop_forever()
设备2模拟代码 dev2.py
import paho.mqtt.client as mqtt# 连接成功回调def on_connect(client, userdata, flags, rc): print('Connected with result code '+str(rc)) client.subscribe('devices/2')# 消息接收回调def on_message(client, userdata, msg): print(msg.topic+" "+str(msg.payload)) client.publish('gateway/device/2',payload=f'echo {msg.payload}',qos=0)client = mqtt.Client()# 指定回调函数client.on_connect = on_connectclient.on_message = on_message# 建立连接client.connect('127.0.0.1', 1883)# 发布消息client.publish('gateway/device/2',payload='Hello, I am device',qos=0)client.loop_forever()
运行网关代码,打开网页得到api接口:
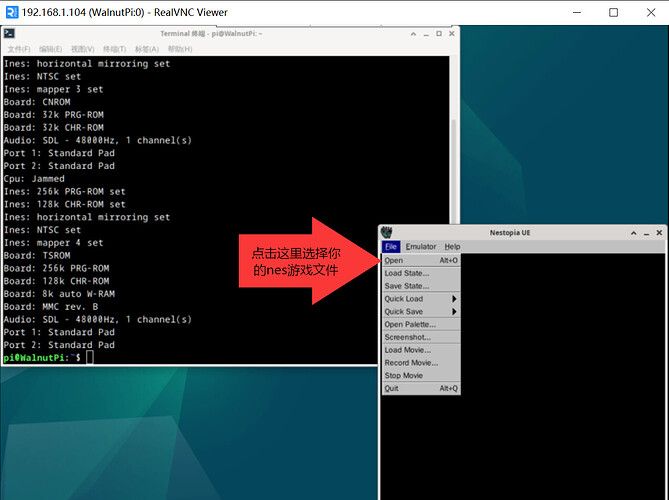
通过api分别添加设备1和设备2,

在另外两个控制台中分别运行模拟设备1和模拟设备2的代码
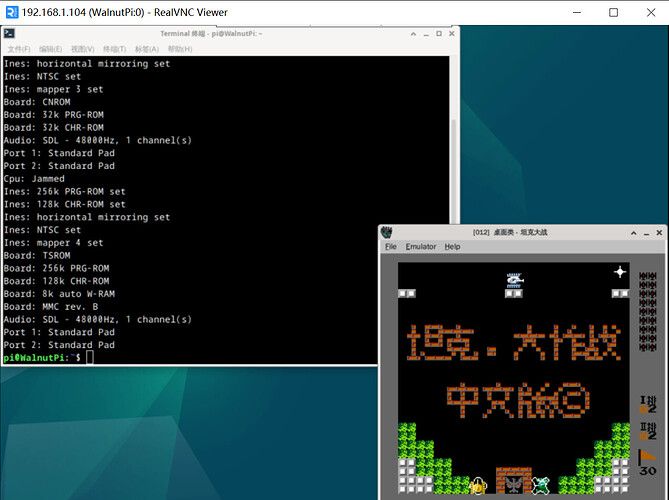
通过网页API向设备1发送数据

通过网页API获得设备回复的数据,设备代码中只是简单的把网关发过来的数据进行回传

我们在网关的后台可以看到完整的数据流

至此一个简易的网关已经实现了,接下来将会尝试实现楼宇里的最常见的bacnet设备进行通讯管理。







































 谢谢老板
谢谢老板


















 我也去生成一幅玩
我也去生成一幅玩