100ASK_D1s-PRO开发板真的是最大限度使用并复用了所有的IO引脚,做了多种兼容设计,可以直接外界模块 调试等操作。
baiwen 发布的帖子
-
回复: Buildroot-2022.2主线已经支持Nezha开发板,原来有这么多大佬喜欢这款芯片,真的太香了!发布在 MR Series
@yuzukitsuru 但是 这确实是一个走向开源不错的开端!

-
回复: Buildroot-2022.2主线已经支持Nezha开发板,原来有这么多大佬喜欢这款芯片,真的太香了!发布在 MR Series
- 感兴趣的同学可以先下载我编译好的整个工程。
传输链接:https://cowtransfer.com/s/81255560080d44 或 打开【奶牛快传】cowtransfer.com 使用传输口令:t7aikl 提取; - 生产的镜像文件 sdcard.zip 可以直接解压缩 烧写使用。
- 感兴趣的同学可以先下载我编译好的整个工程。
-
Buildroot-2022.2主线已经支持Nezha开发板,原来有这么多大佬喜欢这款芯片,真的太香了!发布在 MR Series
尝试编译运行
1. 配置开发环境
参考 之前文章 安装必要软件包 链接文本
获取源码
buildroot官网 点击下载 最新长期支持稳定版本 https://buildroot.org/download.html
配置编译
- 拷贝下载下来的压缩包到 Ubuntu系统下,进行解压缩。
- 进入 buildroot-2022.02 目录下
- 执行 make nezha_defconfig 指定配置文件
- 执行 make 命令开始编译。
等待编译结束......
编译输出文件
进入output找到 sdcard.img 使用 dd命令 或者Windows下使用 wind32diskimg工具 直接烧录进TF卡 插到开发板 上电启动。-
如果您的网络环境不是很好 可以使用下面我编译好的整个项目工程,工程正在压缩 后面再单独回复。
-
我们可以看到 buildroot其实早在 去年就已经首次支持了
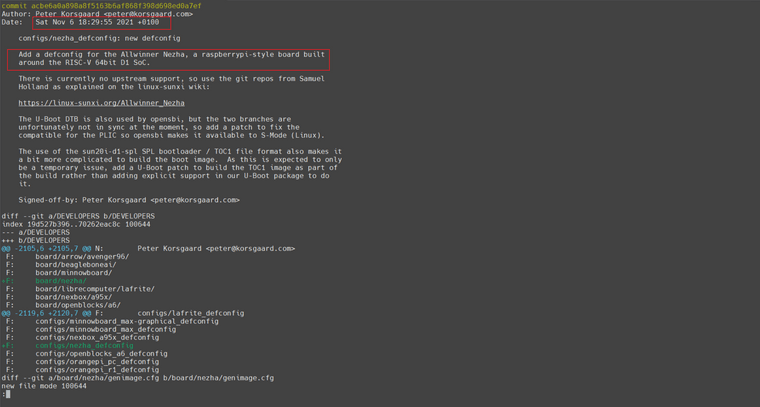
-
DongshanNezhaSTU RISCV架构学习开发板来啦!发布在 MR Series
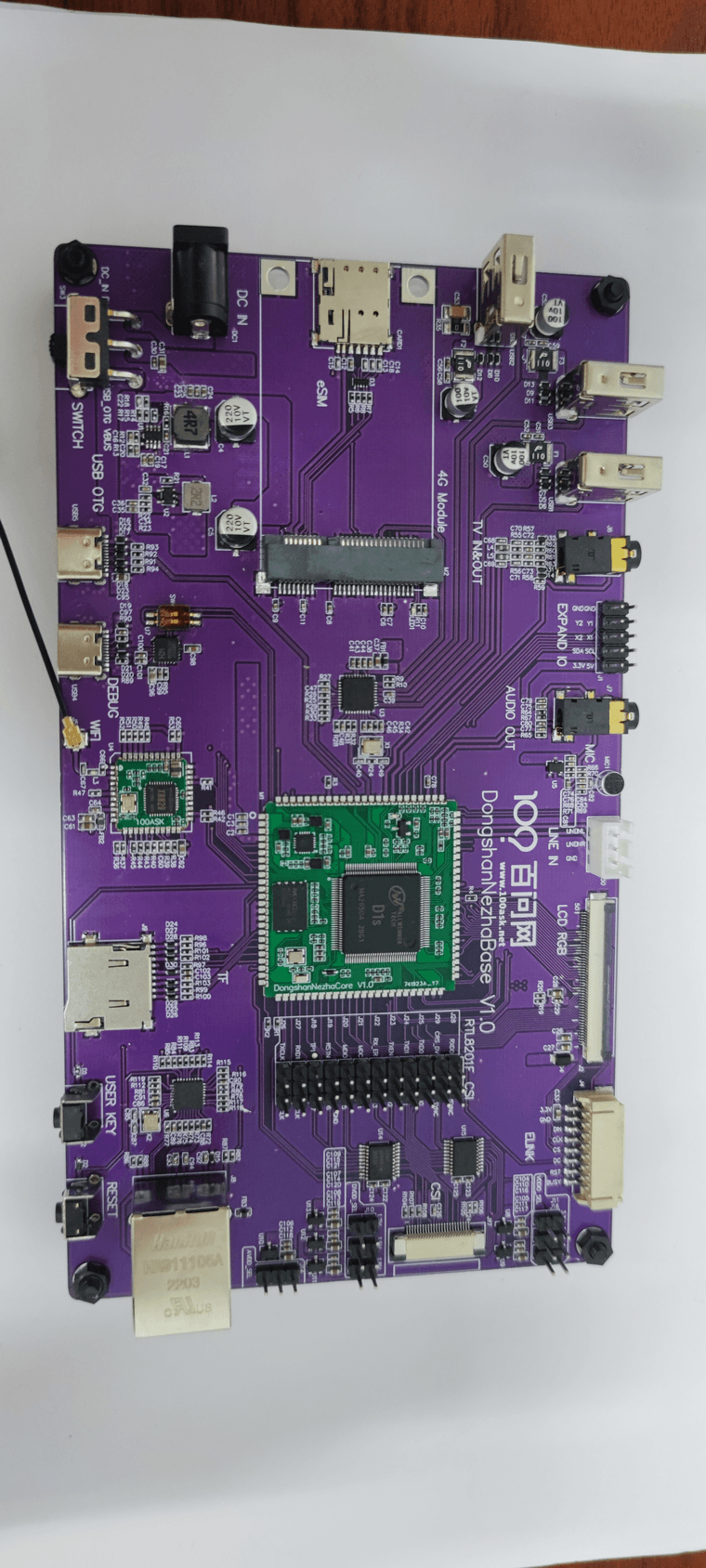
感谢 全志陈总、酷哇社区晕哥、芒果大佬 的鼎力相助。历经3个月的不间断折腾,东山哪吒STU 教育 开发板终于批量生产出来了。
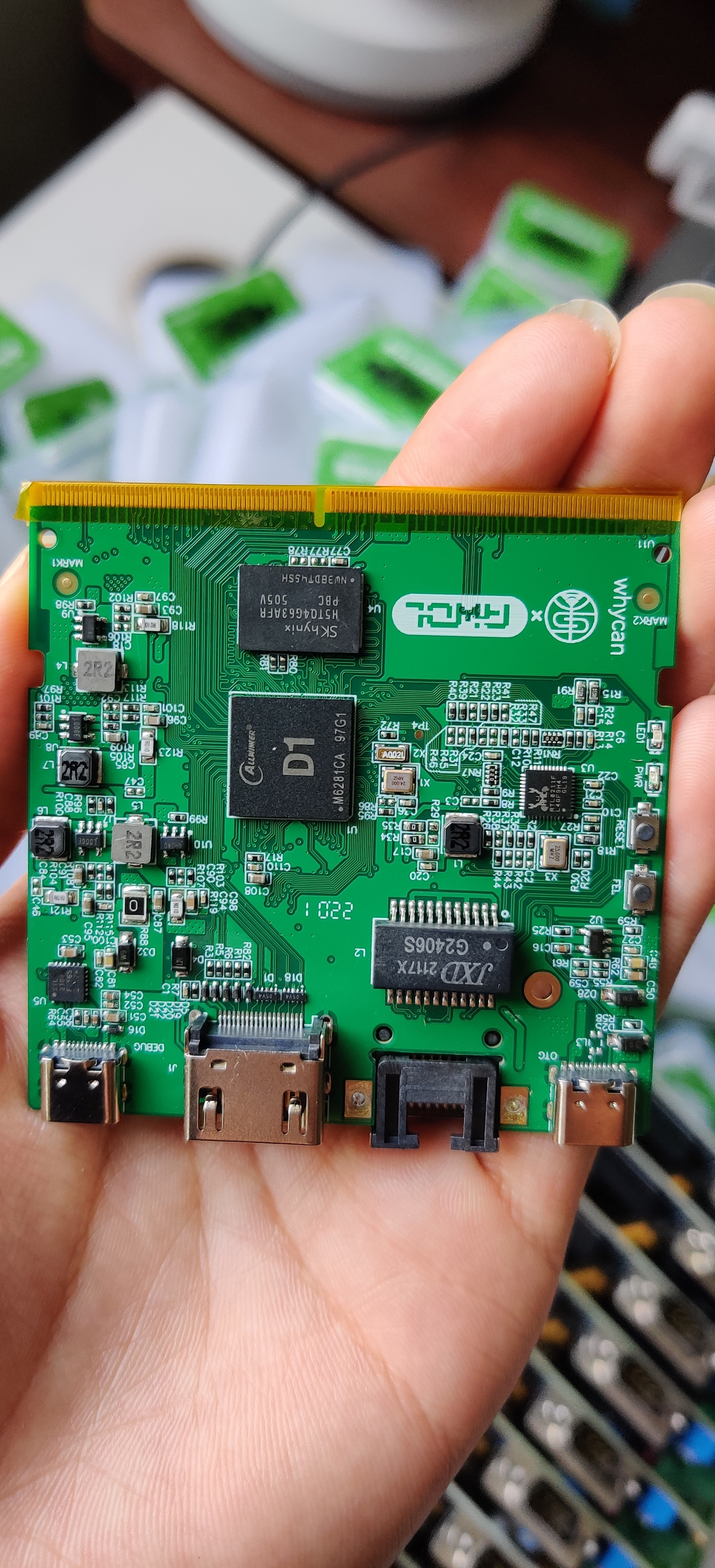
东山哪吒STU开发板是 百问网公司作为 进入RISCV全国产架构的首款开发板,它具有 最基本的常用接口,同时为了更好扩展学习,也有更加丰富的配套扩展接口用于更深入的了解riscv在嵌入式Linux中与arm架构的开发差异,她的主要配置如下- 板载 Allwinner D1 主控芯片
- 板载 512M DDR3 内存芯片
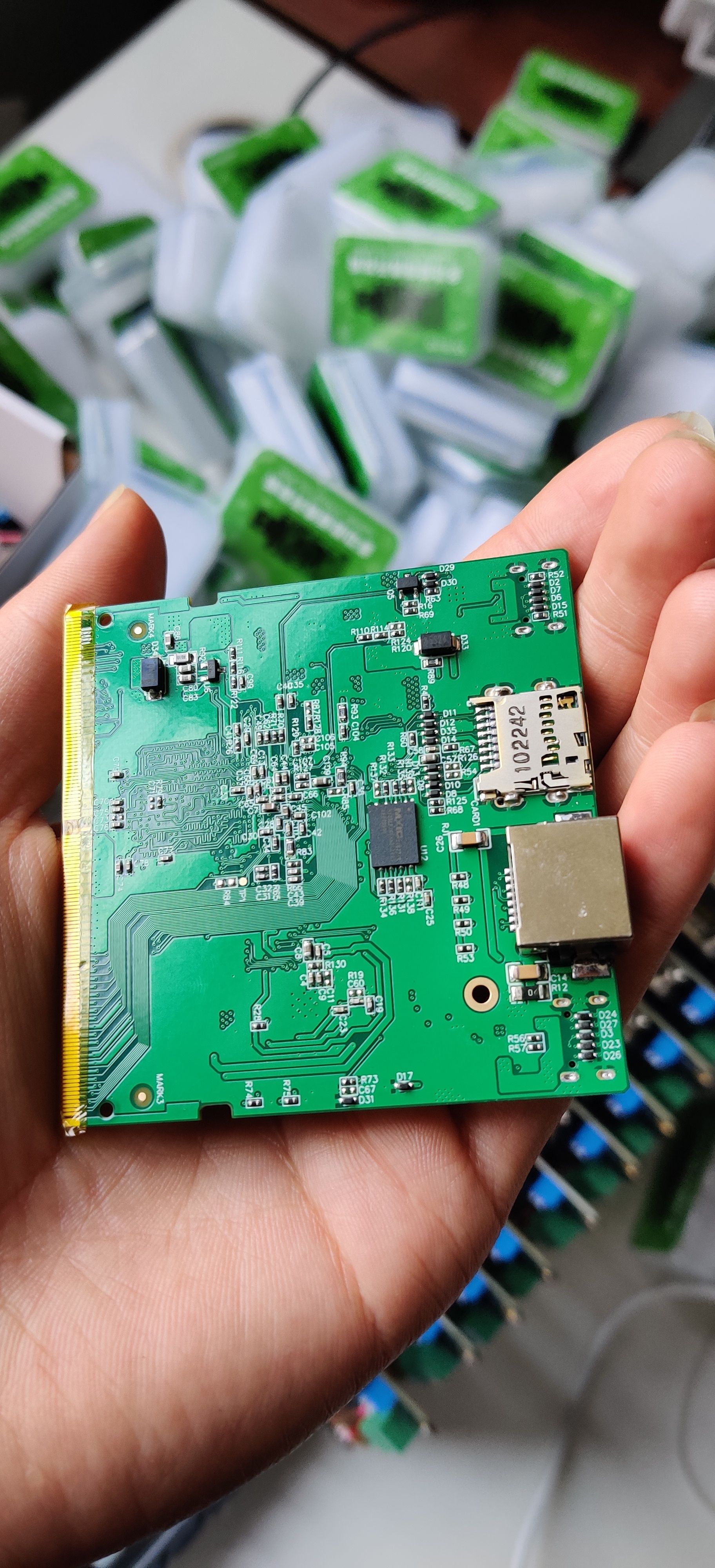
- 板载千兆 RTL RJ45有线网卡
- 板载 TYPEC 转 TTL调试芯片
- 板载 标准HDMI显示接口
- 板载 TF卡可弹出式座子
- 板载 TYPEC OTG烧写接口
- 预留 SPI FLASH芯片焊盘
另外我们也提供了多种产品级的配套底板,目前已有 全阵脚引出的 DIY 底板,用于广大爱好者进行扩展,另外还有一个针对于 产品级的86控制面板 项目在准备阶段。
说了这么多废话,给大家来点实际的:- 价格上:主板仅售149元,配套DIY底板 售 29元。
- 配套资源上:支持 Tina-sdk 支持新版buildroot 支持riscv裸机 当然还有 产品级项目,有文档 视频 以及专门的交流社区。
下面给大家先来几张产品图。

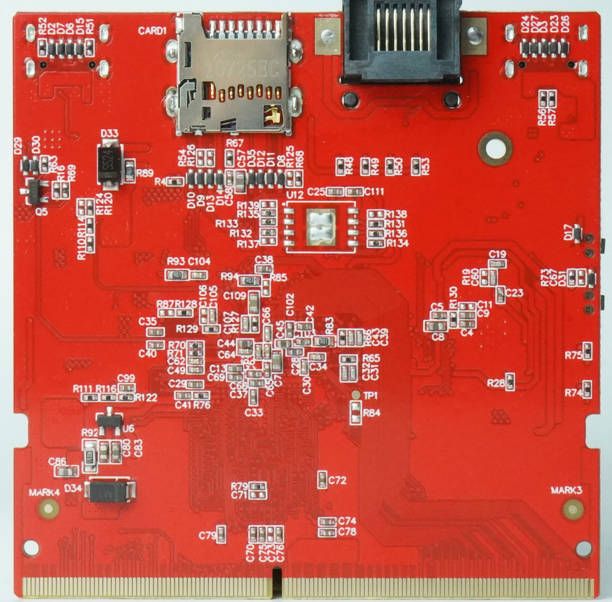
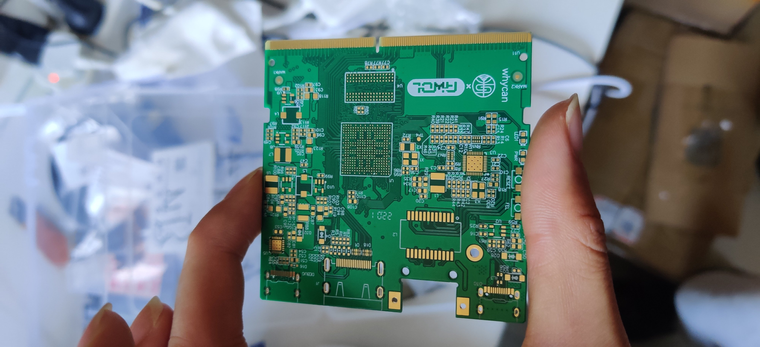
另外底板由于样板还没生产出来 就先给大家看一下 PCB图吧
对了 我们配套的DIY底板 是全开源的,工程文件也给大家放出来吧。还有配套的原理图等。
DongshanNezhaSTU-DIY-BASE_v1.0.zip
DongshanNezhaSTU_DIY-BASE_SCH_V1.0.pdf
DongshanNezhaSTU_CORE_SCH_V1.0.pdf
同时也欢迎大家留言交流你们对 东山哪吒STU 开发的建议与看法!
-
回复: 麻雀D1s开发板支持buildroot 一件构建了。发布在 MR Series
@hilson 前期的测试与驱动开发不适合用CI自动构建,建议是等所有模块本地测试完成后再push到相关仓库,然后触发CI自动完整构建。
-
回复: 麻雀D1s开发板支持buildroot 一件构建了。发布在 MR Series
大家可以试试白嫖 Github CI自动化构建,快还省事。
https://github.com/100askTeam/buildroot-external-mq/blob/main/.github/workflows/buildroot-external-mq.yml
自己增加一个专门的自动构建脚本,在上面的Actions里面启用自动化构建。

构建完成后,会在当前页面输出一个 sdcard.img镜像文件 可以直接下载。
感觉大大增加了开发效率,最主要是免费 。
。
-
麻雀D1s开发板支持buildroot 一件构建了。发布在 MR Series
- 麻雀Buildroot扩展支持 https://github.com/100askTeam/buildroot-external-mq.git
- 全志在线buildroot https://github.com/100askTeam/buildroot_aw-ol.git
MQ-D1S Buildroot external tree
这个Git仓库专门支持全志在线 RV64 的平台。这个是针对
芒果PI MQ开发板专门支持的BR2_EXTERNAL外部扩展支持。快速开始
环境配置
为了使用 Buildroot,您需要在您的工作站上安装 Linux 发行版。 任何最新的 Linux 发行版(Ubuntu、Debian、Fedora、Redhat、OpenSuse 等)都可以正常工作。
但是你需要安装一些必要软件包至您的Linux工作站才可以使用Buildroot manual System requirements section. 对于 Debian/Ubuntu发行版系统,需要参考下述命令安装列出来的软件包。$ sudo apt install debianutils sed make binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio unzip rsync file bc git获取代码
这个
BR2_EXTERNAL会配合着最新的LTS版本一起使用,所以版本会随着 上游的更新而建立新的分支进行更新,目前Buildroot最新BR2_EXTERNAL最新LTS版本是 2021-02 。首先我们获取 buildroot最新lts版本源码。
- 使用git clone
$ git clone https://github.com/100askTeam/buildroot_aw-ol.git buildroot获取buildroot源码后,可以单独获取
芒果PI MQ的BR2_EXTERNAL源码。$ git clone -b main https://github.com/100askTeam/buildroot-external-mq.git获取完成后,可以看到 一个
buildroot目录和一个buildroot-external-mq目录。配置并构建
首先进入到buildroot目录
$ cd buildroot/接下来执行配置命令,来使用
mq_core_defconfig配置文件进行配置。buildrot/ $ make BR2_EXTERNAL=../buildroot-external-mq mq_core_defconfig指定配置文件后,可以使用
make menuconfig命令来增加自己需要的包。增加完成软件包后,就可以直接执行
make命令开始编译了。buildroot/ $ make编译时会自动下载所需的软件包,进行配置编译最后打包成一个完成的系统镜像,整个时间受网络环境而定,一般情况下 只需要60分钟。
烧写并启动系统
编译完成后,会生成一个
sdcard.img系统镜像,镜像文件存放在output/images/目录下。
执行如下命令讲镜像烧录进 tf卡即可,注意/dev/sdXsdX 指的是tf卡设备的主分区。
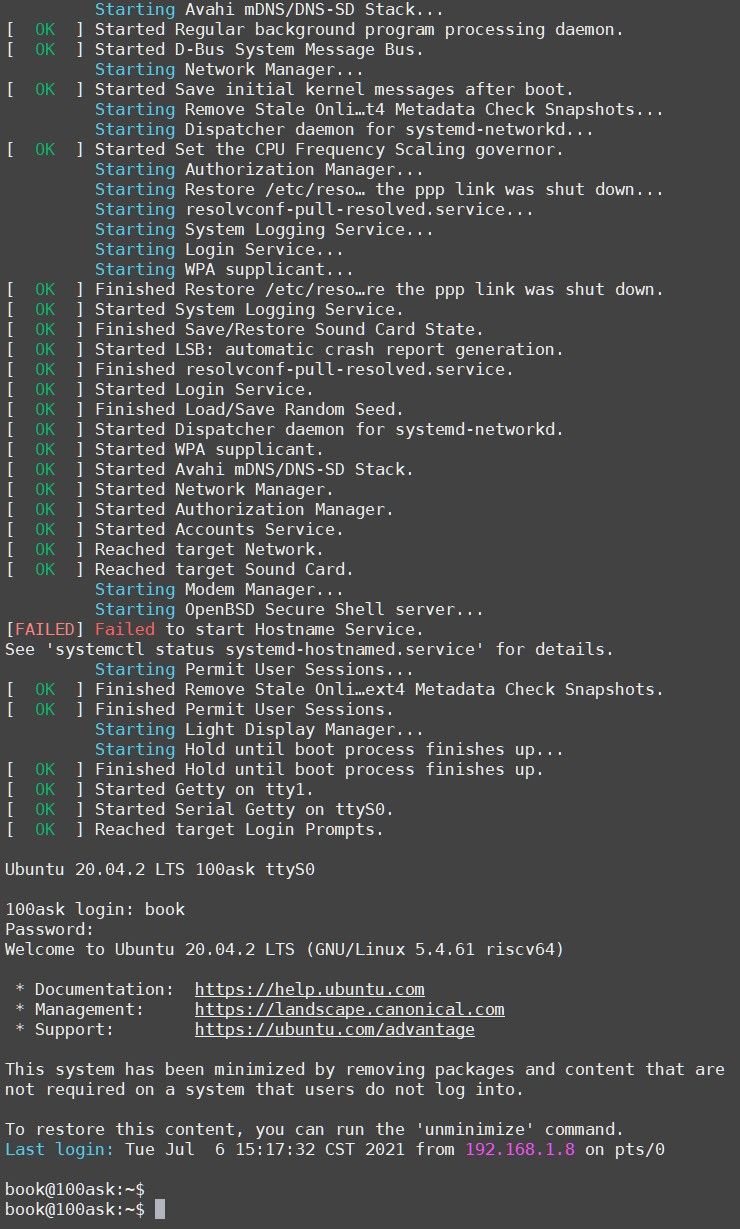
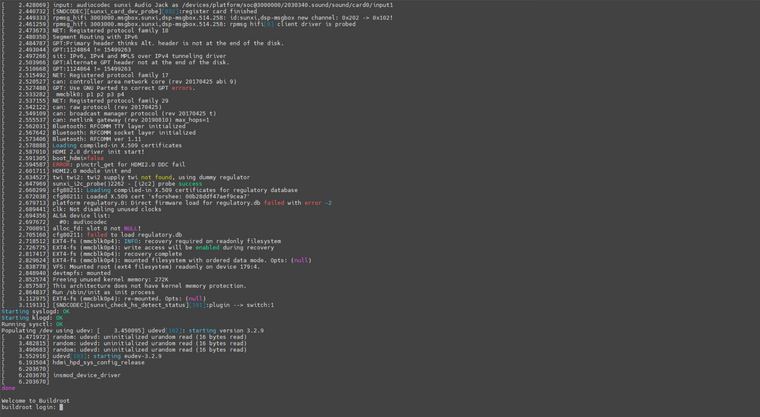
或者可以使用 wind32diskimage进行烧写。buildroot/ $ dd if=output/images/sdcard.img of=/dev/sdX bs=1M烧写完成后,将卡插入至开发板,连接电源线,设置为 tf卡启动,即可启动开发板,之后连接串口,等待进入终端命令行,系统默认的登录用户名是
root。注意这个只是最小系统,大家想做什么二次开发 直接在上面进行适配即可。
-
【实践操作】自己从头构建riscv 64 ubuntu等发行版系统!发布在 MR Series
- 相关参考资料及源码仓库地址
第一章 使用官方提供的源码包进行构建
1.搭建开发环境
1.1 开发涉及的环境/工具:
-
Windows下虚拟化工具VMware workstation pro。
-
vmware 下运行的ubuntu /debian 虚拟机系统。
-
riscv 架构的ubuntu根文件系统源码包。
-
ch-mount.sh挂载文件系统脚本。
1.2 安装qemu虚拟化工具
1.2.1 apt安装
Ubuntu终端下需要安装qemu虚拟化工具,在终端下执行如下命令。
book@100ask:~$ sudo apt-get install qemu-user-static安装完成后,在文件系统下执行如下命令测试是否安装成功。
book@100ask:~$ qemu-riscv64-static -version
1.2.2 手动交叉编译安装
# see https://wiki.qemu.org/Hosts/Linux#Required_additional_packages book@100ask:~$ sudo apt-get install -y pkg-config git libglib2.0-dev libfdt-dev libpixman-1-dev zlib1g-dev book@100ask:~$ git clone https://git.qemu.org/git/qemu.git -b v4.2.0 --depth=1 book@100ask:~$ cd qemu && mkdir build && cd build book@100ask:~$ mkdir out # You have to build as a static binary. book@100ask:~$ ../configure --static --target-list=riscv64-linux-user --prefix=$(pwd)/out book@100ask:~$ make && make install book@100ask:~$ cd ../../2. 获取riscv架构ubuntu根文件系统
使用浏览器访问 http://cdimage.ubuntu.com/ubuntu-base/ 此地址,即可看到ubuntu基本系统所有的版本镜像文件,这里我们选择releases发布版。
我们点击 release 发布版本的连接后进入如下图所示界面,这里列出了ubuntu base各个版本的下载地址,如下图根据红框所示,点击20.04 目前只有ubuntu 20支持了riscv64架构。
点击20.04后在弹出新的页面内继续点击 releases 。
之后页面就跳入ubuntu base 20.04 lts文件系统的下载页面了,这里列出了各种架构的文件系统源码包,不同的历史版本,我们页面往下滑,找到最新的架构为 riscv64的ubuntu系统源码包,如下图红框所示,下载 ubuntu-base-20.04.2-base-riscv64.tar.gz 到电脑磁盘上,让后上传此文件到VMware Ubuntu系统内。
3.Vmware ubuntu-16.04挂载arm架构ubuntu文件系统
3.1. 解压缩arm架构ubuntu-16.04文件系统到ubuntu下
在VMware Ubuntu-16.04虚拟机家目录下创建一个 ubuntu-rootfs目录,用于解压缩保存文件使用。
book@100ask:~$ mkdir ubuntu-rootfs book@100ask:~$ sudo tar -xvf ubuntu-base-20.04.2-base-riscv64.tar.gzz -C ubuntu-rootfs/查看当前路径下的文件结构已经OK
3.1.2 拷贝qemu模拟工具到riscv64架构ubuntu-rootfs文件系统下
book@100ask:~$ sudo cp usr/bin/qemu-riscv64-static ubuntu-rootfs/usr/bin/注意:qemu-riscv64-static 指的是riscv64架构的虚拟化工具,果是其他架构的则拷贝其他文件。
如果你是手动编译生成的qemu-riscv64-static文件,则参考下述命令。
book@100ask:~$ sudo cp ./qemu/build/out/bin/qemu-riscv64 ./riscv/usr/bin/qemu-riscv64-staticubuntu-roofs/usr/bin/ 指的是你当前解压riscv64架构的ubuntu20.04文件系统后的所在目录下的 usr/bin。
拷贝主机DNS配置文件到arm架构Ubuntu文件系统内(必须拷贝,否则可能会导致下面操作无法进行)。
book@100ask:~$ sudo cp /etc/resolv.conf ubuntu-rootfs/etc/resolv.conf3.1.2 chroot到模拟riscv64文件系统下
我们需要使用chroot 改变根目录来挂载riscv架构的ubuntu根文件系统,并配置或安装一些必要资源,首先创建ch-mount.sh 脚本。
book@100ask:~$ vi ch-mount.sh将以下的内容复制到ch-mount.sh中。
#!/bin/bash function mnt() { echo "MOUNTING" sudo mount -t proc /proc ${2}proc sudo mount -t sysfs /sys ${2}sys sudo mount -o bind /dev ${2}dev sudo chroot ${2} } function umnt() { echo "UNMOUNTING" sudo umount ${2}proc sudo umount ${2}sys sudo umount ${2}dev } if [ "$1" == "-m" ] && [ -n "$2" ] ; then mnt $1 $2 elif [ "$1" == "-u" ] && [ -n "$2" ]; then umnt $1 $2 else echo "" echo "Either 1'st, 2'nd or both parameters were missing" echo "" echo "1'st parameter can be one of these: -m(mount) OR -u(umount)" echo "2'nd parameter is the full path of rootfs directory(with trailing '/')" echo "" echo "For example: ch-mount -m /media/sdcard/" echo "" echo 1st parameter : ${1} echo 2nd parameter : ${2} fi考虑到shell脚本对空格很灵敏,所以将我使用的文件放在如下地址处。
book@100ask:~$ wget \ https://weidongshan.coding.net/p/DevelopmentEnvConf/d/DevelopmentEnvConf/git/raw/master/ubuntu_rootfs-mount/ch-mount.sh book@100ask:~$ chmod +x ch-mount.sh接下来我们使用ch-mount.sh脚本挂载arm架构ubuntu-16.04文件系统,挂载命令如下所示,挂载成功后会提示 MOUNTING。
book@100ask:~$ sudo ./ch-mount.sh -m ubuntu-rootfs/此时我们可以在此执行 uname -a来查看系统内核的详细信息,你会发现现在是 riscv架构。
4. 配置arm架构的ubuntu系统
4.1 安装基础软件包
Chroot进入模拟的arm架构Ubuntu系统后需要先安装如下必须的安装包,安装包安装过程会根据你的网络下载速率可能会需要一段时间。
安装基础软件包之前需要先执行 apt-get update命令来更新软件源,用以获取软件包的地址等。
软件源更新完成后,可以安装必要软件包,安装速度根据个人网速绝定。
apt-get install \ language-pack-en-base sudo ssh net-tools network-manager iputils-ping rsyslog \ bash-completion language-pack-zh-hans vim resolvconf kmod usbutils alsa-base4.2 用户名密码等相关设置
- 添加用户、设定合适的组并设置密密码
添加book用户并加入admin sudo用户组,设置密码为123456
root@100ask:/# useradd -s '/bin/bash' -m -G adm,sudo book root@100ask:/# echo "Set password for book:" root@100ask:/# passwd book初始化root用户密码,这里设置为123456
root@100ask:/# passwd root4.3 其它配置
- 设置主机名称和hosts
在模拟的arm架构ubuntu根文件系统下执行如下两条命令即可设置主机名称。
root@100ask:/# echo 100ask > /etc/hostname root@100ask:/# echo 100ask > /etc/hosts- 配置登陆的启动串口脚本
因为暂时未安装桌面,所以这里的配置要具体和内核中登录的串口的设备对应起来,不然对导致无法通过串口登录的问题。
在 /etc/init/ 下添加或修改ttyS0.conf
root@100ask:/# cat > /etc/init/ttyS0.conf << EOT start on stopped rc RUNLEVEL=[2345] stop on runlevel [!2345] respawn exec /sbin/getty -L 115200 S0 EOT- 配置网卡接口
root@100ask:/# cat >> /etc/network/interfaces << EOT auto lo iface lo inet loopback auto eth0 iface eth0 inet dhcp EOT4.4 退出arm模拟文件系统
配置或安装完基本的设置后,就可以退出模拟的arm架构文件系统了,操作步骤如下,先在模拟的arm架构文件系统内执行exit 退出到 VMware ubuntu虚拟机终端界面,让后卸载chroot挂载。
root@100ask:/# exit book@100ask:~$ sudo ./ch-mount -u ubuntu-rootfs 完成这些后,我们需要把内核镜像设备树,以及模块驱动等文件拷贝到riscv架构的ubuntu文件系统相应目录内。
4.5 配置系统内核模块以及固件
安装内核模块到riscv架构的ubuntu文件系统内,如下命令所示,INSTALL_MOD_PATH后面的目录地址为arm架构ubuntu文件系统所在绝对路径(模块安装前需要先编译模块)。
book@100ask:~$ sudo make ARCH=riscv INSTALL_MOD_PATH=/home/book/ubuntu-rootfs modules_install 安装完成后查看risv架构ubuntu文件系统的 lib/modules/ 目录下是否有如下相应文件生成
自此,riscv架构的ubuntu文件系统已经基本制作完成,接下来我们需要制作为可烧录的镜像文件。
4.6 使用nfs方式启动系统系统
目前uboot不支持网卡,据说官方正在适配中。
5. 制作可烧录的固件
5.1 制作ext4文件系统镜像
如下命令所示,需要先生成一个大小为2GB的 ubuntu-rootfs.ext4 镜像文件,让后格式化镜像为ext4格式,之后通过挂载镜像方式把制作好的镜像文件拷贝到文件系统内。
book@100ask:~$ dd if=/dev/zero of=ubuntu-rootfs.ext4 bs=1M count=2048 book@100ask:~$ sudo mkfs.ext4 -F ubuntu-rootfs.ext4 如下命令所示,创建一个ubuntu-mount 目录,并挂载ubuntu-rootfs.ext4 镜像到该目录下,之后拷贝制作好的文件系统内所有文件到此挂载目录,紧接着使用sync命令同步数据缓存保证拷贝完成,完成后可以使用sudo umount ubuntu-mount/卸载当前挂载的镜像。
book@100ask:~$ mkdir ubuntu-mount book@100ask:~$ sudo mount ubuntu-rootfs.ext4 ubuntu-mount/ book@100ask:~$ sudo cp -rvfp ubuntu-rootfs/* ubuntu-mount/ book@100ask:~$ sync book@100ask:~$ sudo umount ubuntu-mount/5.2 使用genimage制作可烧录镜像
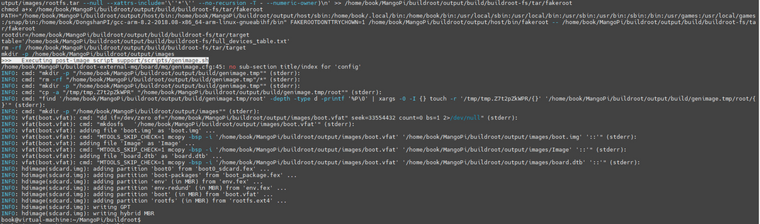
我们只制作好ext4格式的文件系统并不能直接烧录到开发板启动,此时我们需要使用buildroot下的genimage工具来帮我们打包生成一个完整的镜像文件。
首先把制作好的 ubuntu-rootfs.ext4 镜像拷贝到已经编译过的 buildroot output/images目录下。
book@virtual-machine:~/Neza-D1/buildroot-2021/output/images$ 修改buildroot根目录下board/Neza/d1/genimage.cfg 分区配置文件,来指定一下rootfs分区用的镜像文件。
1 image Neza-d1-ubuntu-20-sdcard.img { 2 hdimage{ 3 gpt = true 4 gpt-location = 1M 5 } 6 partition boot0 { 7 in-partition-table = "no" 8 image = "boot0_sdcard.fex" 9 offset = 8K 10 } 11 partition boot-packages { 12 in-partition-table = "no" 13 image = "boot_package.fex" 14 offset = 16400K 15 } 16 partition env { 17 image = "env.fex" 18 size = 128k 19 } 20 partition env-redund { 21 image = "env.fex" 22 size = 128k 23 } 24 partition boot { 25 partition-type = 0xC 26 bootable = "true" 27 image = "boot.vfat" 28 } 29 partition rootfs { 30 partition-type = 0x83 31 image = "ubuntu-rootfs.ext4" 32 } 33 } 34 35 image boot.vfat { 36 vfat { 37 files = { 38 "boot.img", 39 "Image", 40 "board.dtb" 41 } 42 } 43 size = 32M 44 } 执行上述步骤以后,保存退出 在buildroot根目录下执行make all命令来打包生成完整的镜像,最后生成的镜像输出在 buildroot根目录下的output/images/ 可以拷贝出来用windows下的wind32diskimage工具进行烧录 烧录成功后即可启动。
文件系统只读问题
- 开发板启动 切换终端 一直按 s 键 进入uboot命令行模式,来给设置bootargs 增加rw 读写权限。
setenv bootargs earlyprintk=sunxi-uart,0x02500000 clk_ignore_unused initcall_debug=0 console=ttyS0,115200 loglevel=8 root=/dev/mmcblk0p4 rw init=/sbin/init partitions=ext4 cma=8M gpt=1 saveenv设置成功后 保存重启。
6. 启动后常见问题
6.1 网络相关问题
- 不能上网
配置dns服务器文件
vim /etc/resolv.conf
添加你的dns地址,至于怎么获取就不过多阐述
route add default gw 192.168.1.1
关于发行版文件系统的想法与建议
统一一个可大家长期维护的发行版系统镜像
- 目前看到有很多自己做的发行版系统镜像,各有各的优势与问题,我们是否可以统一成一个开源镜像大家一起维护升级,给更多的新的朋友一个更好的体验呢?
使用github自动化工作流来自行构建生成系统镜像
- 发现每次修改ubuntu文件系统只是做了一次小的改动 却要机械化的处理整个打包编译生成的过程,太过于浪费时间效率,想使用GitHub的CI自动化来根据我们每次的修改自动编译构建生成系统镜像文件,方便你我他。
-
回复: 关于D1启动流程中设备树的位置发布在 MR Series
@johnweston 在 关于D1启动流程中设备树的位置 中说:
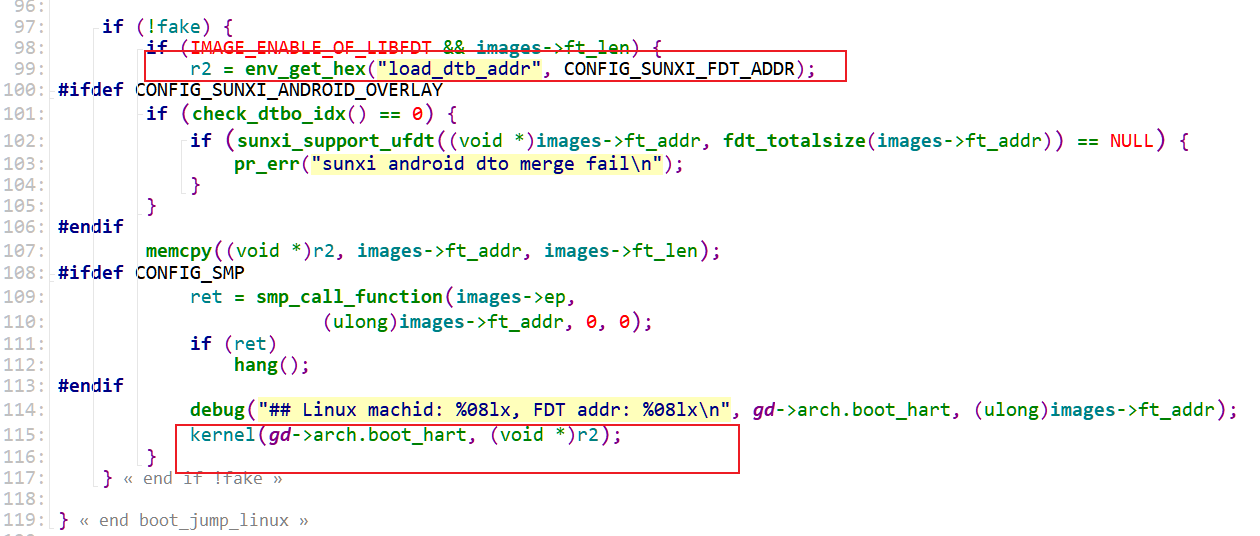
我现在是将设备树直接编译到二进制文件中避开这一点,但是还是无法正确引导 Kernel,在跳转到 UBoot 前我将编入的设备树放到了 a1 寄存器,但是 Uboot 似乎没有正确识别。
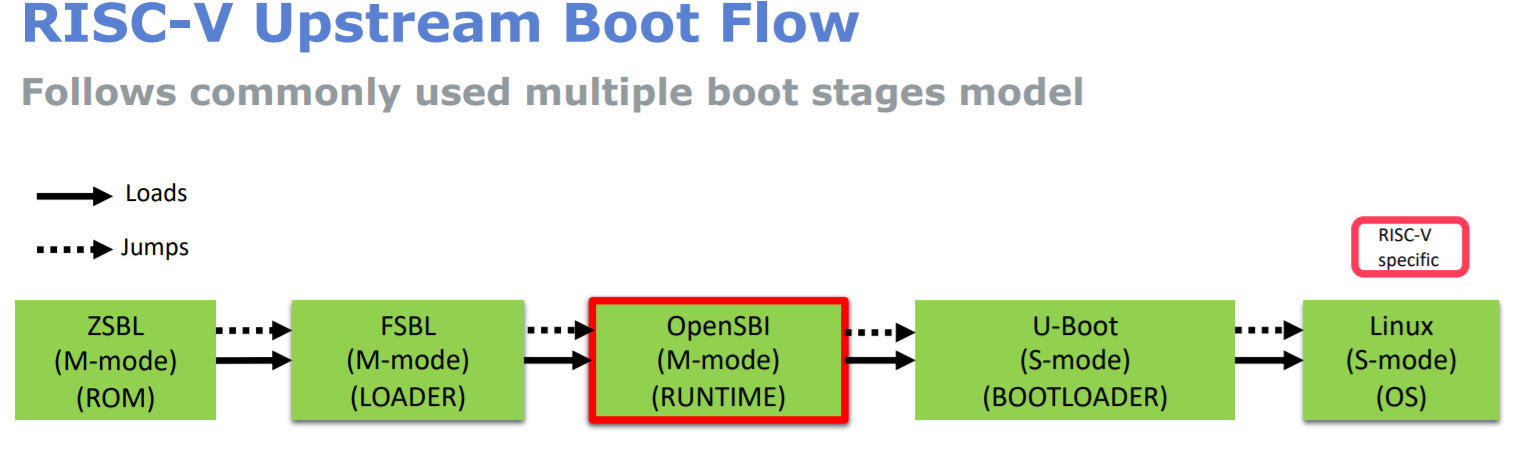
D1设备树uboot操作放在了r2寄存器内特定的地址,目前D1的做法是将 opensbi uboot dtb三个文件打包在了一起来用。
-
回复: 【极简操作】使用builroot 2021一键编译生成D1 nezha 系统镜像!发布在 MR Series
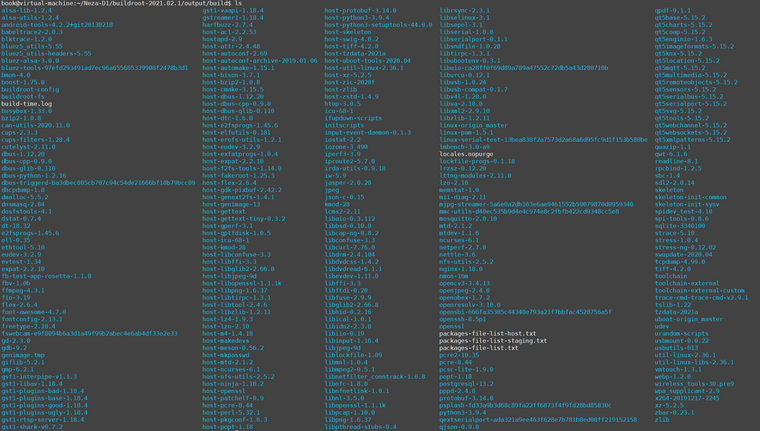
Buildroot Git仓库最新支持如下图所示更丰富的常用软件包和lib库 方便大家学习与调试。
-
回复: 【极简操作】使用builroot 2021一键编译生成D1 nezha 系统镜像!发布在 MR Series
@aiminick
使用uboot内的mkenvimage 执行如下命令。
mkenvimage -r -p 0x00 -s 0x20000 -o env.fex env.cfg
-
回复: 完整支持buildroot 2021 LTS构建D1开发板SD卡系统镜像发布在 MR Series
@whycan 参考 我们那个git仓库里 对buildroot opensbi 包做的修改 以及opensbi源码的修改。
-
回复: 如何让D1 uboot支持uImage镜像 + dtb启动系统?发布在 MR Series
@whycan 感谢回复 boot0阶段没有做深入的研究 只是拿来用,现在主要问题是默认的uboot并不支持使用bootm来单独加载设备树和uImage启动系统。
-
【极简操作】使用builroot 2021一键编译生成D1 nezha 系统镜像!发布在 MR Series
使用buildroot编译构建系统
- buildroot gitee仓库地址 https://gitee.com/weidongshan/neza-d1-buildroot.git
- buildroot github仓库地址 https://github.com/100askTeam/neza-d1-buildroot.git
- opensbi gitee仓库地址 https://gitee.com/weidongshan/NezaD1-opensbi.git
- u-boot gitee仓库地址 https://gitee.com/weidongshan/NezaD1-u-boot-2018.git
- Linuxkernel gitee仓库地址 https://gitee.com/weidongshan/NezaD1-linuxkernel.git
欢迎大家编译使用提交问题和建议到对应的仓库
编译完整系统或者各个部分
- 我们编译使用的是ubuntu 18.04 系统,在进行如下编译之前需要先配置基本编译环境,参考下述命令来安装必须的软件包。
book@virtual-machine:~/Neza-D1/buildroot-2021$ sudo apt-get install -y which sed make binutils build-essential gcc g++ bash patch gzip bzip2 perl tar cpio unzip rsync file bc wget python ncurses5 bazaar cvs git mercurial rsync scp subversion android-tools-mkbootimg- 使用git命令clone源码
book@virtual-machine:~$ mkdir -p ~/Neza-D1/ && cd ~/Neza-D1/ book@virtual-machine:~/Neza-D1$ git clone https://gitee.com/weidongshan/neza-d1-buildroot.git buildroot-2021构建完整系统镜像
- 编译完整系统镜像
book@virtual-machine:~/Neza-D1/buildroot-2021$ make neza-d1_defconfig //加载配置文件 book@virtual-machine:~/Neza-D1/buildroot-2021$ make all //完整编译系统- 编译生成的系统镜像在output/image目录下,其中sdcard.img为完整的系统镜像。
book@virtual-machine:~/Neza-D1/buildroot-2021/output/images$ ls board.dtb boot.img boot_package.fex boot.vfat env.cfg fw_dynamic.bin fw_jump.bin Image rootfs.cpio rootfs.ext2 rootfs.tar sunxi.fex uImage boot0_sdcard.fex boot_package.cfg boot.scr dragonsecboot env.fex fw_dynamic.elf fw_jump.elf ramdisk.img rootfs.cpio.gz rootfs.ext4 sdcard.img u-boot-sun20iw1p1.bin book@virtual-machine:~/Neza-D1/buildroot-2021/output/images$单独编译各个部分
- 单独编译 opensbi阶段
book@virtual-machine:~/Neza-D1/buildroot-2021$ make opensbi-rebuild V=1- 单独编译 uboot阶段
book@virtual-machine:~/Neza-D1/buildroot-2021$ make uboot-rebuild V=1- 单独编译 kernel阶段
book@virtual-machine:~/Neza-D1/buildroot-2021$ make kernel-rebuild V=1- 单独编译文件系统
- 指定完成工具链 系统配置 需要安装的包 以及所需的格式 执行如下命令,最后生成的镜像在 output/image目录下。
book@virtual-machine:~/Neza-D1/buildroot-2021$ make all //完整编译系统烧写启动
-
windows下使用wind32diskimage工具烧写,Linux下直接使用dd 命令完整写入
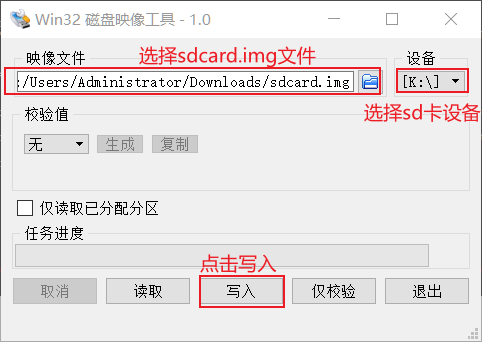
![image-20210701105748748] -
烧写成功后把卡插入开发板 开发板上电 即可自动从sd卡启动进入系统
ToDoList
已实现功能
- 支持平头哥 rv64d外部工具链。
- 支持buildroot构建 Tina sdk 内 Thead c910 opensbi 。
- 支持buildroot 构建Tina sdk 内 u-boot 2018
- 支持buildroot构建Linux kernel 5.4自动生成Image并后续打包为boot.img
- 自动构建并打包生成SD卡 busybox udev最小系统启动。
未实现 计划实现
- 支持qt python mqtt gst等常用软件包。
- 支持systemD init服务。
- 支持板载wifi 模块。
如何参与此项目
提交PR
提交issues
20210706更新:
Buildroot Git仓库最新支持如下图所示更丰富的常用软件包和lib库 方便大家学习与调试。
-
如何让D1 uboot支持uImage镜像 + dtb启动系统?发布在 MR Series
问题1
我们现在想用单独使用工具链编译的uboot去单独加载uImage 和设备树文件来启动开发板系统,
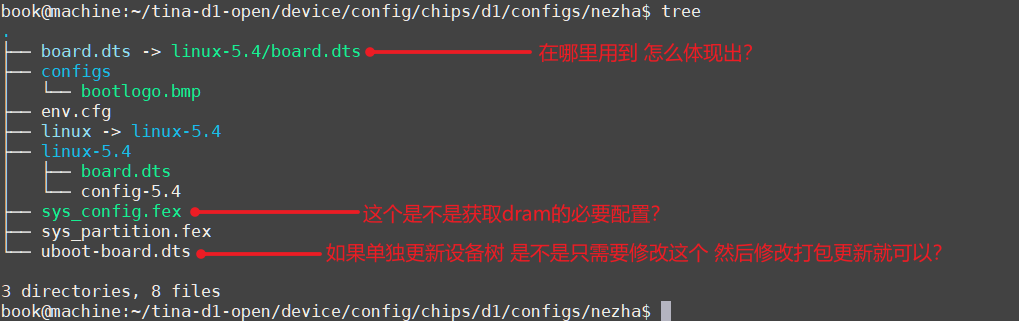
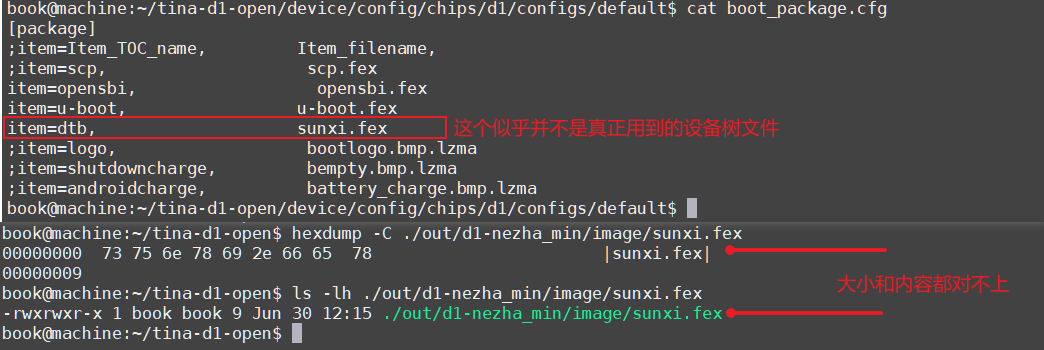
但是参考发现你们的boot.img似乎没有用到设备树,所以我不明白设备树用的是那里的 我要单独更新设备树应该怎么操作 ?
问题2
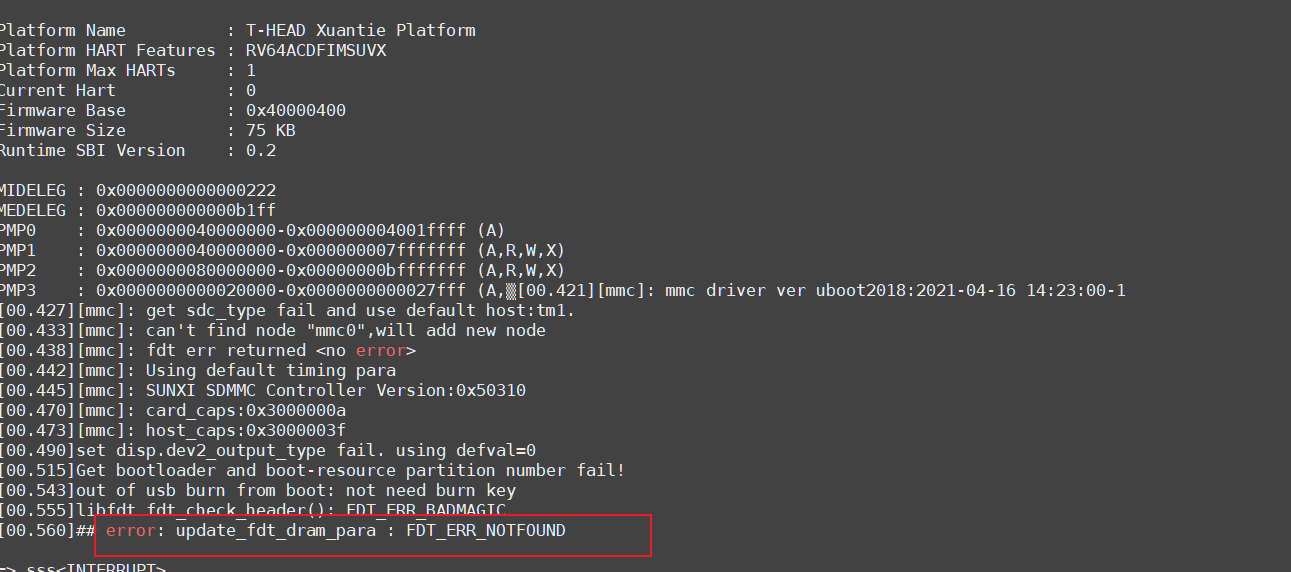
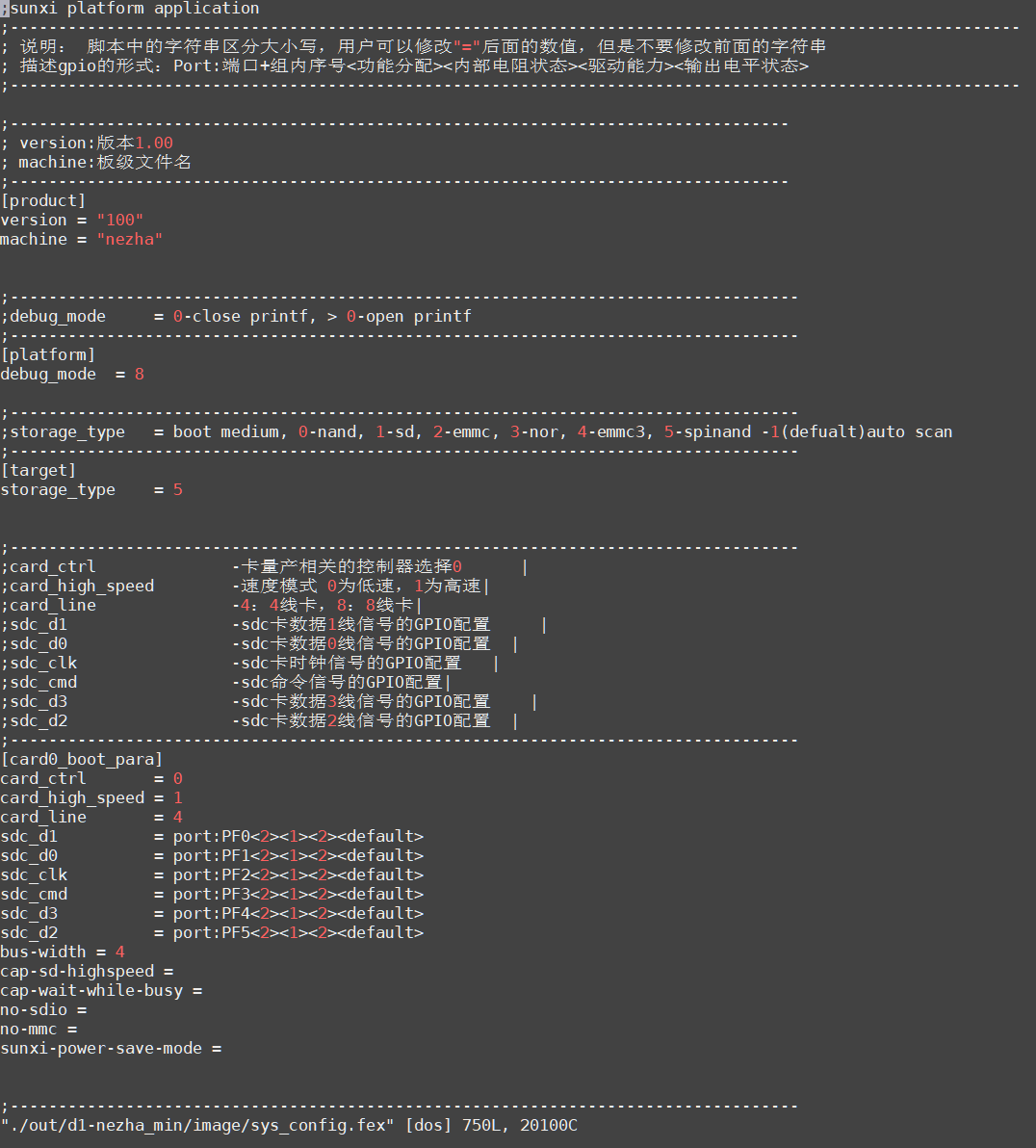
我们在尝试使用过程中uboot出现/dram not found问题 通过查看tina sdk发现dram配置信息似乎在 sys_config.fex 文件内,我要如何将dram文件增加到自编译的uboot内?-
uboot 加载uImage dtb失败log
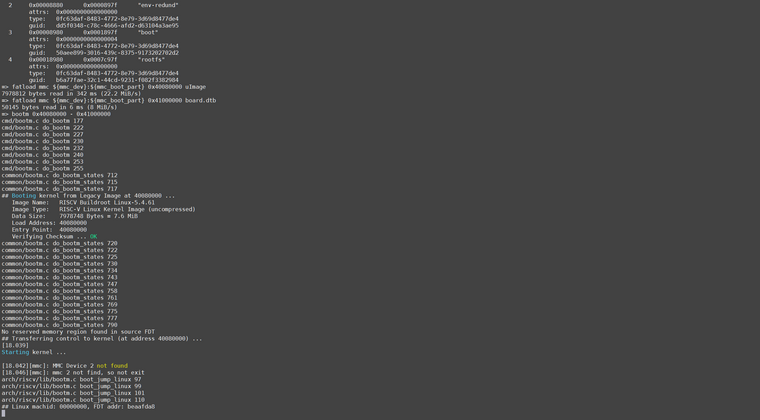
-
uboot读取dram参数节点错误信息
-
tina sdk内 类似dram配置文件
-
关于设备树以及tina-sdk内不太清楚的问题
-
-
完整支持buildroot 2021 LTS构建D1开发板SD卡系统镜像发布在 MR Series
完整支持使用社区buildroot 2021自动编译构建D1 TF卡启动镜像,可以专门用来研究D1启动流程 工具链或者研究各个部分 boot0 opensbi u-boot kernel rootfs 等 对于深入理解RISC V 64有很大的帮助,目前正在整理合并源码 预计下周之前可以发布 获取最新动态请关注 https://gitee.com/weidongshan/neza-d1-buildroot.git

-
回复: 如何将单独编译的opensbi u-boot kernel rootfs 烧录制作成可以启动的sdcard.img镜像?发布在 MR Series
@damon 在 如何将单独编译的opensbi u-boot kernel rootfs 烧录制作成可以启动的sdcard.img镜像? 中说:请问可以单独讲讲 boot-package 的存放方式么?
-
如何将单独编译的opensbi u-boot kernel rootfs 烧录制作成可以启动的sdcard.img镜像?发布在 MR Series
各位大佬晚上好 我目前通过使用全志提供的sdk内工具链可以单独编译 opensbi uboot kernel busybox最小系统,除了kernel 和busybox部分可以通过分区挂载替换的方式进行更新刷写,但是opensbi uboot这部分如何在不借助全志工具的情况下单独更新呢?
之前看到社区内liangdi 大佬做的debian系统 启动后查看分区信息时可以看到如下。
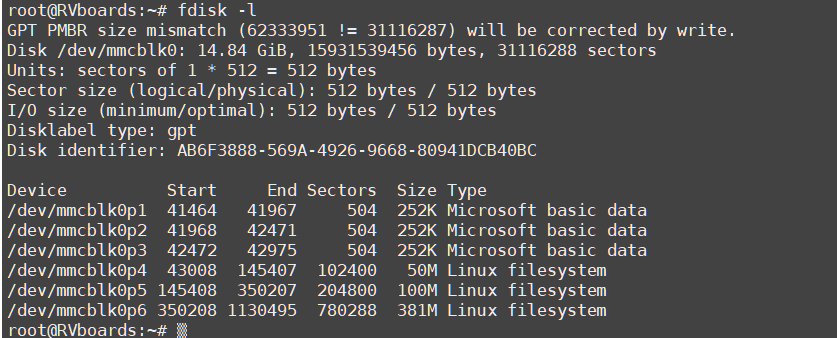
通过分区工具查看
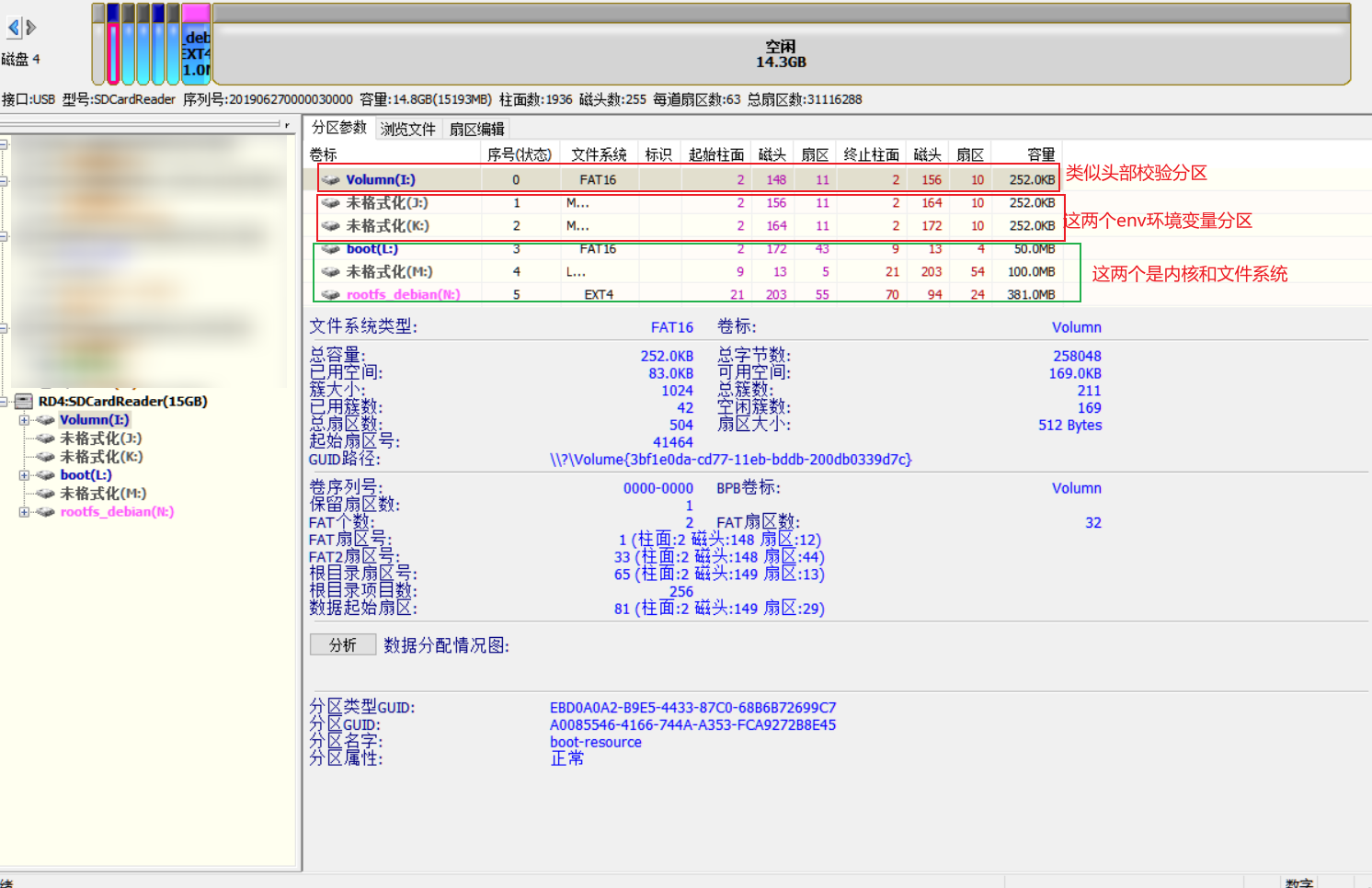
后来发现这三个分区是通过下面这个工具单独生成的,并非全志sdk构建出来的那个版本。
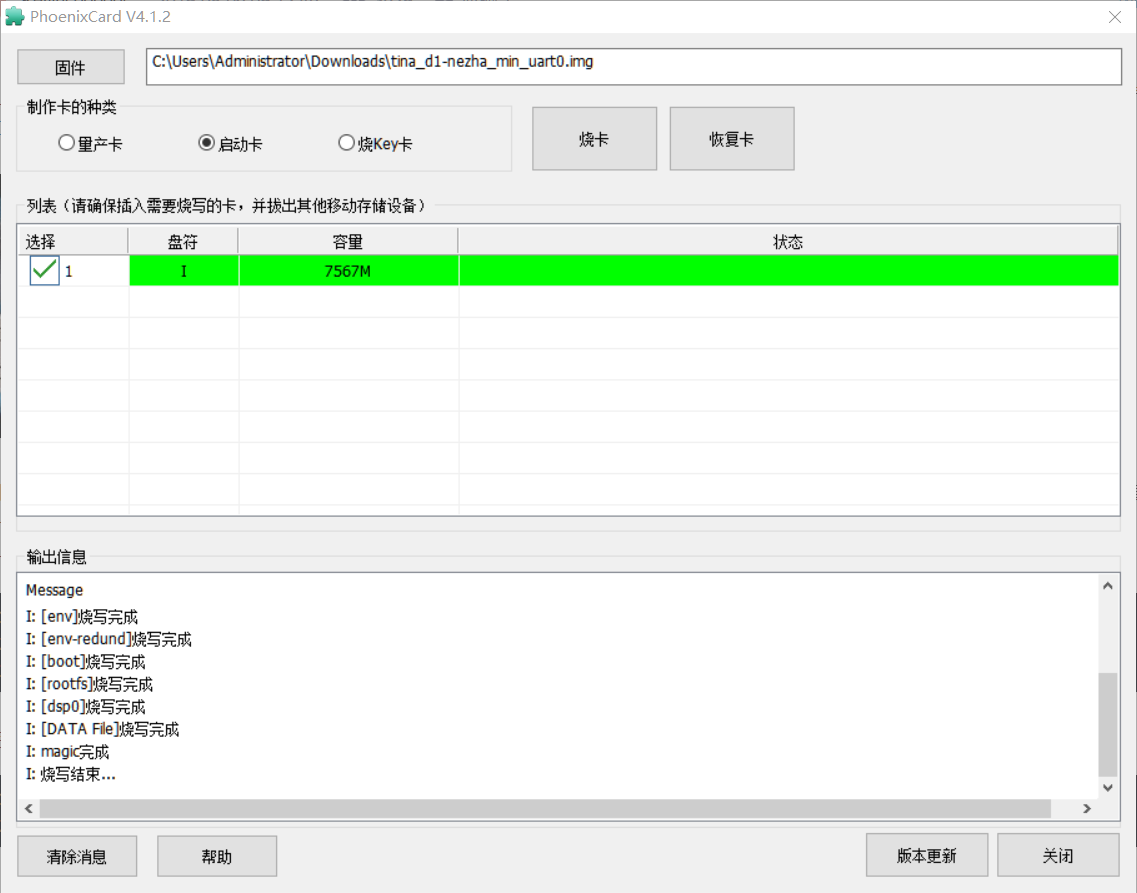
后面分析sdk内的 scripts/pack_img.sh 脚本以及单独执行pack打包命令验证,发现最开始的三个分区,对应的文件分别是boot-resource.fex env.fex ,后面将其使用wind32diskimage工具直接烧录至SD卡 并未能看到分区信息。
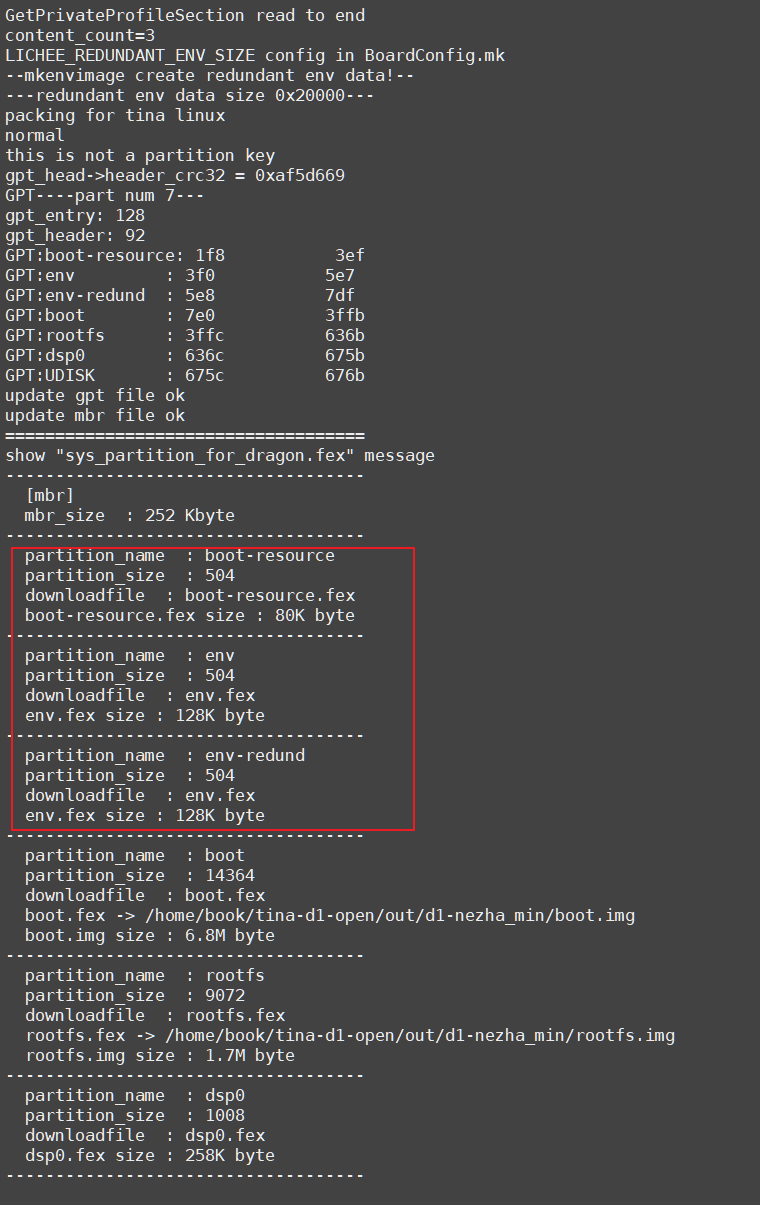
之后我找到boot-resource.fex 来分析制作过程并查看文件 ,发现 boot-resource.fex 文件大小确只有 80k 仅仅opensbi部分编译出来都将近80k 那么u-boot部分会保存在哪里呢?

希望有了解的大佬指点一下,想搞明白具体的启动流程和分区信息等。
-
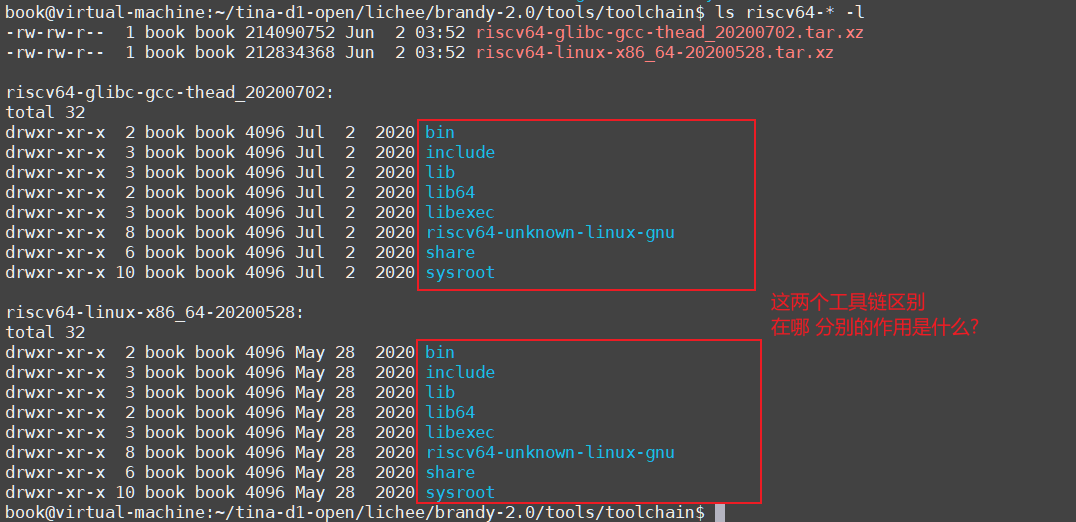
两个riscv64交叉编译工具的区别是什么?发布在 MR Series
请问一下 ~/tina-d1-open/lichee/brandy-2.0/tools/toolchain 目录下这两个riscv64的工具链有什么区别 分别都是在哪里会用到的 , 自己编译时应该以那个为准 ?
-
回复: 关于D1开发板SD卡启动 系统镜像分区问题?发布在 MR Series
@xiaowenge 你好 现在我还不知道按照那种分区格式将编译好的固件打包 是否有类似的参考 我将编译单独编译好的固件打包成一个完整镜像 再通过量产SD卡工具进行配置?
-
关于D1开发板SD卡启动 系统镜像分区问题?发布在 MR Series
我想单独编译 各个部分镜像 并单独打包生成一个可以img镜像 可以直接烧录进sd卡内 但是目前没有看到具体的启动分区地址及对应的偏移地址信息说明 请问 如果想自己手动使用genimage手动制作一个完整的系统镜像应该如何配置?
如下log是从我openwrt构建工具执行 pack打包命令看到一些分区信息 但是有些地方不太明白
show "sys_partition_for_dragon.fex" message
[mbr]
mbr_size : 252 Kbyte
partition_name : boot-resource
partition_size : 8064
downloadfile : boot-resource.fex
boot-resource.fex size : 3.0M byte
partition_name : env
partition_size : 504
downloadfile : env.fex
env.fex size : 128K byte
partition_name : env-redund
partition_size : 504
downloadfile : env.fex
env.fex size : 128K byte
partition_name : boot
partition_size : 20664
downloadfile : boot.fex
boot.fex -> /home/book/tina-d1-open/out/d1-nezha/boot.img
boot.img size : 9.1M byte
partition_name : rootfs
partition_size : 40824
downloadfile : rootfs.fex
rootfs.fex -> /home/book/tina-d1-open/out/d1-nezha/rootfs.img
rootfs.img size : 16M byte
partition_name : dsp0
partition_size : 1008
downloadfile : dsp0.fex
dsp0.fex size : 258K byte
partition_name : recovery
partition_size : 28224
-
使用社区buildroot单独编译构建D1开发板系统opensbi出错发布在 MR Series
我在尝试使用buildroot官方lts 2021版本构建工具,其中工具链使用 从官方sdk下载下来的 ~/tina-d1-open/lichee/brandy-2.0/tools/toolchain/riscv64-linux-x86_64-20200528.tar.gz 尝试构建 opensbi 部分提示错误,目前来似乎是工具链不支持某些指令集导致的问题 请问有可以直接单独用来编译 opensbi的工具链么?
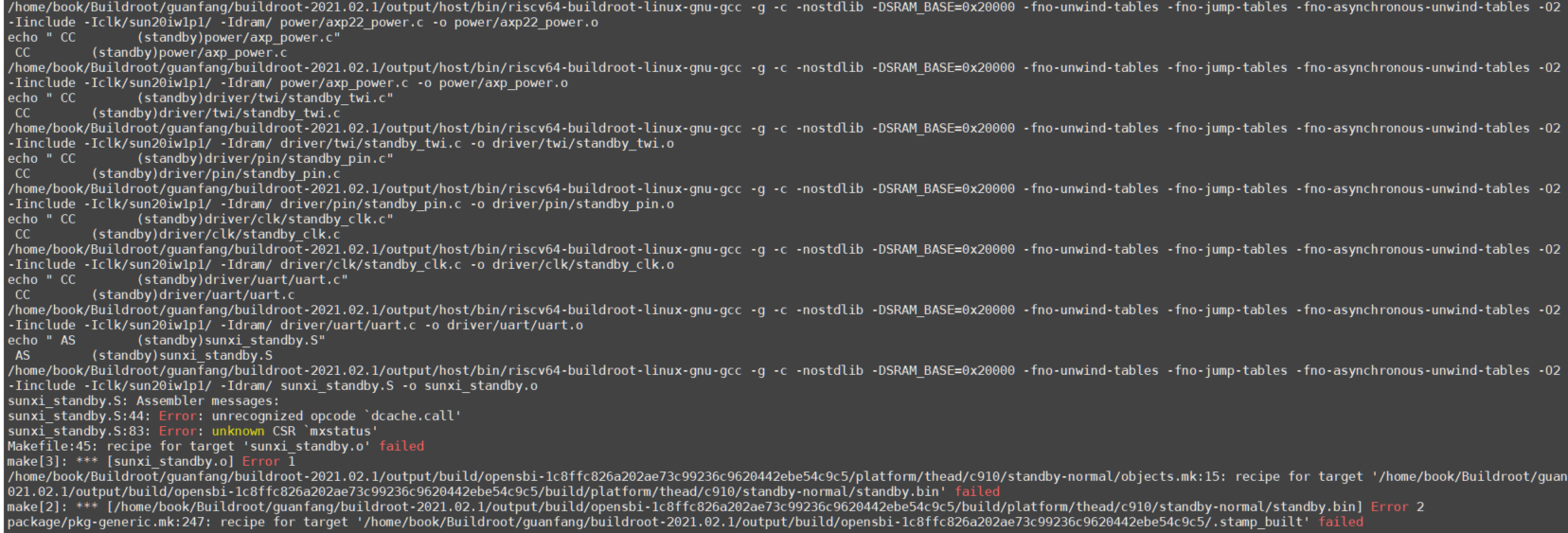
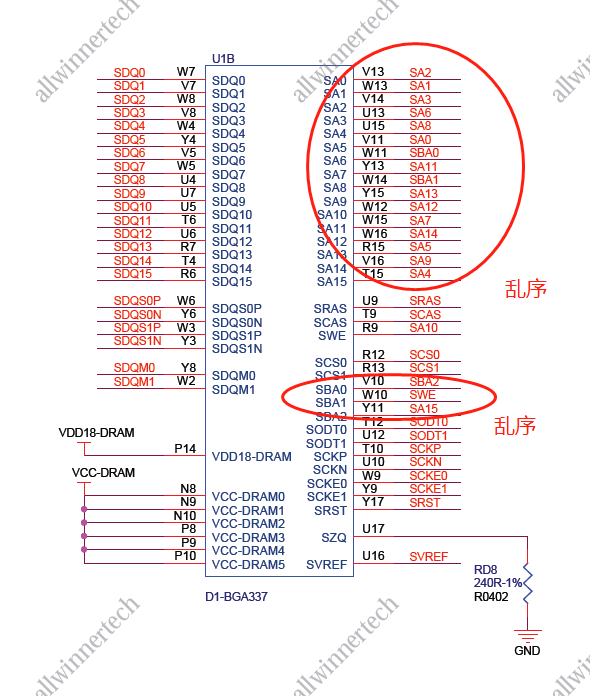
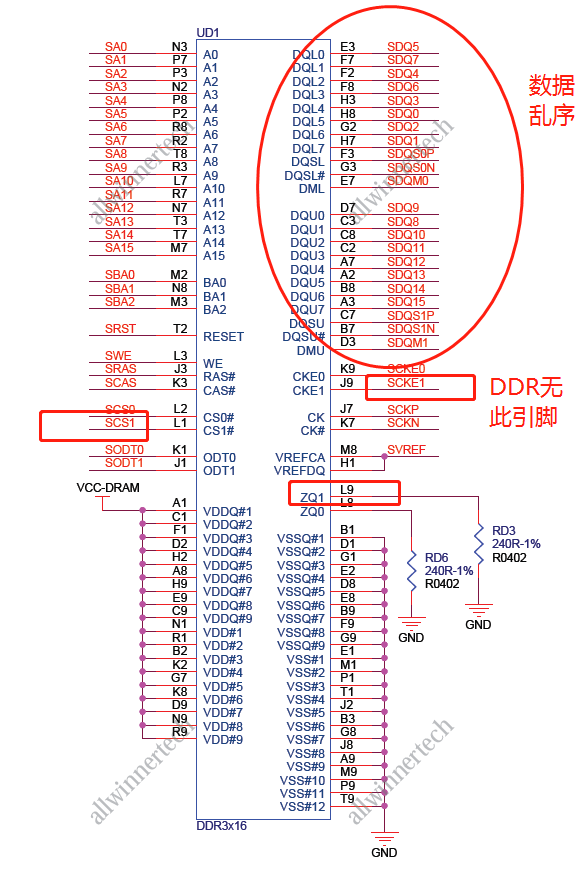
 焊接技术
焊接技术
 导致看起来很别扭。
导致看起来很别扭。