@willok 发表一个回复就是LV2了
A
awwwwa 发布的最佳帖子
-
回复: 搭建开发环境,出现问了了,总是报fatal: cannot obtain manifest https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git发布在 V Series
- 执行命令设置全局保存密码
git config --global credential.helper store- 执行命令输入密码
git clone https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git- 使用repo拉取sdk
repo init -u https://sdk.aw-ol.com/git_repo/V853Tina_Open/manifest.git -b master -m tina-v853-open.xml由于repo更新,目前不支持通过repo输入密码,请先使用git命令输入保存密码
-
R128-S2 驱动 1024x600 RGB 显示屏 并运行 LVGL发布在 A Series
由于屏幕较大首先精简系统内存,关闭DSP核心,并将 RV 核心移到 HSPSRAM 上提高带宽。配置 LV_COLOR_DEPTH 16 提高帧率降低内存占用
patch 如下,增加了新方案r128-devkit-rgb:161ca91b-f759-4108-8bfc-85114394da0c-r128-devkit-rgb.tar.gz
编译打包即可
700ms启动 LVGL:
-
回复: V853 的 CPU1(E907)启动流程发布在 RTOS
参考Linux端代码即可,本质上为:
- 加载固件
- 调用 firmware 接口获取文件系统中的固件
- 解析固件的 resource_table 段,该段有如下内容
- 声明需要的内存(Linux 为其分配)
- 声明使用的 vdev(固定为一个)
- 声明使用的 vring(固定为两个)
- 将固件加载到指定地址
- 注册 rpmsg virtio 设备
- 提供 vdev->ops(基于 virtio 接口实现的)
- 与 rpmsg_bus 驱动匹配,完成 rpmsg 初始化
- 启动小核
- 调用 rproc->ops->start
- 加载固件
-
回复: 寻求tina的display 官方文档说明,感谢发布在 V Series
disp init configuration disp_mode (0:screen0<screen0,fb0>) screenx_output_type (0:none; 1:lcd; 2:tv; 3:hdmi;5:vdpo) screenx_output_mode (used for hdmi output, 0:480i 1:576i 2:480p 3:576p 4:720p50) (5:720p60 6:1080i50 7:1080i60 8:1080p24 9:1080p50 10:1080p60) screenx_output_format (for hdmi, 0:RGB 1:yuv444 2:yuv422 3:yuv420) screenx_output_bits (for hdmi, 0:8bit 1:10bit 2:12bit 2:16bit) screenx_output_eotf (for hdmi, 0:reserve 4:SDR 16:HDR10 18:HLG) screenx_output_cs (for hdmi, 0:undefined 257:BT709 260:BT601 263:BT2020) screenx_output_dvi_hdmi (for hdmi, 0:undefined 1:dvi mode 2:hdmi mode) screen0_output_range (for hdmi, 0:default 1:full 2:limited) screen0_output_scan (for hdmi, 0:no data 1:overscan 2:underscan) screen0_output_aspect_ratio (for hdmi, 8-same as original picture 9-4:3 10-16:9 11-14:9) fbx format (4:RGB655 5:RGB565 6:RGB556 7:ARGB1555 8:RGBA5551 9:RGB888 10:ARGB8888 12:ARGB4444) fbx pixel sequence (0:ARGB 1:BGRA 2:ABGR 3:RGBA) fb0_scaler_mode_enable(scaler mode enable, used FE) fbx_width,fbx_height (framebuffer horizontal/vertical pixels, fix to output resolution while equal 0) lcdx_backlight (lcd init backlight,the range:[0,256],default:197 lcdx_yy (lcd init screen bright/contrast/saturation/hue, value:0~100, default:50/50/57/50) lcd0_contrast (LCD contrast, 0~100) lcd0_saturation (LCD saturation, 0~100) lcd0_hue (LCD hue, 0~100) framebuffer software rotation setting: disp_rotation_used: (0:disable; 1:enable,you must set fbX_width to lcd_y, set fbX_height to lcd_x) degreeX: (X:screen index; 0:0 degree; 1:90 degree; 3:270 degree) degreeX_Y: (X:screen index; Y:layer index 0~15; 0:0 degree; 1:90 degree; 3:270 degree) devX_output_type : config output type in bootGUI framework in UBOOT-2018. (0:none; 1:lcd; 2:tv; 4:hdmi;) devX_output_mode : config output resolution(see include/video/sunxi_display2.h) of bootGUI framework in UBOOT-2018 devX_screen_id : config display index of bootGUI framework in UBOOT-2018 devX_do_hpd : whether do hpd detectation or not in UBOOT-2018 chn_cfg_mode : Hardware DE channel allocation config. 0:single display with 6 channel, 1:dual display with 4 channel in main display and 2 channel in second display, 2:dual display with 3 channel in main display and 3 channel in second in display. -
回复: 个人开发者如何获取D1、D1s的 SDK?需要签NDA吗?发布在 代码下载问题专区
@damiaa 现在是新版本平台了,直接拿awol账号下载,免去再注册一个平台的麻烦:https://d1.docs.aw-ol.com/study/study_3getsdktoc/
-
回复: V851S tina linux ov5647 驱动程序没有 dmesg发布在 V Series
ov5647 这个型号的摄像头并没有适配,SDK也没有支持。
请参考V85x的摄像头支持手册选择适配的摄像头。这里推荐已经量产的产品使用的GC2063,GC2083,GC4663这三款摄像头,已经经过严格的测试与调试,可以达到最佳画质和分辨率
-
回复: 关于打印启动日志到/dev/fb0的问题发布在 V Series
找到 env.cfg
#kernel command arguments earlyprintk=sunxi-uart,0x02500000 initcall_debug=0 console=ttyS0,115200 consolefb=tty0 nand_root=ubi0_4 mmc_root=/dev/mmcblk0p4 nor_root=/dev/mtdblock1 init=/init loglevel=8 coherent_pool=16K #reserve_list=30M@64M,78M@128M,200M@512M mac= wifi_mac= bt_mac= specialstr= root_partition=rootfs mtd_name=sys rootfstype=ubifs, rw #set kernel cmdline if boot.img or recovery.img has no cmdline we will use this setargs_nor=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} console=${console—fb} loglevel=${loglevel} root=${nor_root} rootwait init=${init} rdinit=${rdinit} partitions=${partitions} cma=${cma} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} setargs_nand=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} console=${console—fb} loglevel=${loglevel} ubi.mtd=${mtd_name} root=${nand_root} rootfstype=${rootfstype} rootwait init=${init} rdinit=${rdinit} partitions=${partitions} cma=${cma} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} selinux=${selinux} specialstr=${specialstr} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} setargs_nand_ubi=setenv bootargs ubi.mtd=${mtd_name} earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} console=${console—fb} loglevel=${loglevel} root=${nand_root} rootfstype=${rootfstype} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 setargs_mmc=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} console=${console—fb} loglevel=${loglevel} root=${mmc_root} rootwait init=${init} partitions=${partitions} cma=${cma} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} selinux=${selinux} specialstr=${specialstr} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} #nand command syntax: sunxi_flash read address partition_name read_bytes #0x4007f800 = 0x40080000(kernel entry) - 0x800(boot.img header 2k) boot_partition=boot boot_normal=sunxi_flash read 44800000 ${boot_partition};bootm 44800000 boot_recovery=sunxi_flash read 44800000 extend;bootm 44800000 boot_fastboot=fastboot #recovery key recovery_key_value_max=0x13 recovery_key_value_min=0x10 #fastboot key fastboot_key_value_max=0x8 fastboot_key_value_min=0x2 #uboot system env config bootdelay=1 #default bootcmd, will change at runtime according to key press bootcmd=run setargs_nand boot_normal#default nand boot #verify the kernel verify=N -
回复: V853S mipi LCD显示驱动调试,colorbar显示异常发布在 V Series
dclk过高,屏幕分屏了?
这里提供一个py脚本计算分频系数,这里对应的是HV屏,DSI也可以参考def find_closest_clock(target_clock, clock_list): clock_list = sorted(clock_list) low, high = 0, len(clock_list) - 1 closest = clock_list[low] while low <= high: mid = (low + high) // 2 if clock_list[mid] < target_clock: low = mid + 1 elif clock_list[mid] > target_clock: high = mid - 1 else: return clock_list[mid] if abs(clock_list[mid] - target_clock) < abs(closest - target_clock): closest = clock_list[mid] return closest def calculate_divisor(clock_need, clock_list, min_divisor=6): is_perfect = True for i in clock_list: for j in range(0, 255): if (clock_need * j) == i: closest_clock = i divisor = j return closest_clock, divisor, is_perfect is_perfect = False closest_clock = find_closest_clock(clock_need, clock_list) if closest_clock == 0: return None, None, None divisor = closest_clock // clock_need if divisor < min_divisor: min_diff = float('inf') best_clock = None for clock in clock_list: if clock >= clock_need * min_divisor: current_divisor = clock // clock_need if current_divisor < min_divisor: continue diff = abs(clock - clock_need * current_divisor) if diff < min_diff: min_diff = diff best_clock = clock if best_clock is not None: return best_clock, best_clock // clock_need, is_perfect return closest_clock, divisor, is_perfect clock_list = [ 408, 420, 432, 444, 456, 468, 480, 492, 504, 516, 528, 540, 552, 564, 576, 588, 600, 612, 624, 636, 648, 660, 672, 684, 696, 708, 720, 732, 744, 756, 768, 780, 792, 804, 816, 828, 840, 852, 864, 876, 888, 900, 912, 924, 936, 948, 960, 972, 984, 996, 1008, 1020, 1032, 1044, 1056, 1068, 1080, 1092, 1104, 1116, 1128, 1140, 1152, 1164, 1176, 1188, 1200, 1212, 1224, 1236, 1248, 1260, 1272, 1284, 1296, 1308, 1320, 1332, 1344, 1356, 1368, 1380, 1392, 1404, 1416, 1428, 1440, 1452, 1464, 1476, 1488, 1500, 1512, 1524, 1536, 1548, 1560, 1572, 1584, 1596, 1608, 1620, 1632, 1644, 1656, 1668, 1680, 1692 ] clock_need = int(input("请输入需要的时钟(MHz): ")) closest_clock, divisor, is_perfect = calculate_divisor(clock_need, clock_list) if is_perfect: print(f"父时钟: {closest_clock}MHz, 分频系数: {divisor}, 分频后的频率: {closest_clock / divisor}MHz") else: print(f"无法找到完美,最近的父时钟: {closest_clock}, 分频系数: {divisor}, 分频后的频率: {closest_clock / divisor}MHz") print("请修改分频系数表 clk_tbl 中 HV 分频系数为: {LCD_IF_HV, " + hex(divisor) + ", 1, 1, 0}") -
回复: V851se的u-boot引导发布在 V Series
会,启动介质优先级描述了每个介质被选择为启动介质的可能性。BROM 首先读取具有最高优先级的介质的 boot0。如果该介质不存在或存在任何问题,BROM 将尝试下一个介质。否则,该介质将被选择为启动介质。
具体可以查看手册GPIO Boot Select表格
-
回复: 有R128点亮百问网7寸RGB屏的DEMO吗?发布在 A Series
R128-S2 驱动 1024x600 RGB 显示屏 并运行 LVGL
https://bbs.aw-ol.com/topic/4316/share/1 -
回复: V851s使用spi nand启动不了 VFS: Cannot open root device "ubi0_4" or unknown-block(0,0): error -2发布在 V Series
重点:rootfstype=squashfs
v851s/configs/xxx/env.cfg
#kernel command arguments earlyprintk=sunxi-uart,0x02500000 initcall_debug=0 console=ttyS0,115200 nand_root=/dev/ubiblock0_4 mmc_root=/dev/mmcblk0p4 nor_root=/dev/mtdblock3 init=/init rdinit=/rdinit loglevel=8 coherent_pool=32K #reserve_list=30M@64M,78M@128M,200M@512M mac= wifi_mac= bt_mac= specialstr= root_partition=rootfs mtd_name=sys rootfstype=squashfs #set kernel cmdline if boot.img or recovery.img has no cmdline we will use this setargs_nor=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${nor_root} rootwait init=${init} rdinit=${rdinit} partitions=${partitions} cma=${cma} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} setargs_nand=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} ubi.mtd=${mtd_name} root=${nand_root} rootfstype=${rootfstype} rootwait init=${init} rdinit=${rdinit} partitions=${partitions} cma=${cma} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} selinux=${selinux} specialstr=${specialstr} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} setargs_nand_ubi=setenv bootargs ubi.mtd=${mtd_name} ubi.block=0,${root_partition} earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${nand_root} rootfstype=${rootfstype} init=${init} partitions=${partitions} cma=${cma} snum=${snum} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} specialstr=${specialstr} gpt=1 setargs_mmc=setenv bootargs earlyprintk=${earlyprintk} clk_ignore_unused initcall_debug=${initcall_debug} console=${console} loglevel=${loglevel} root=${mmc_root} rootwait init=${init} partitions=${partitions} cma=${cma} mac_addr=${mac} wifi_mac=${wifi_mac} bt_mac=${bt_mac} selinux=${selinux} specialstr=${specialstr} coherent_pool=${coherent_pool} ion_carveout_list=${reserve_list} #nand command syntax: sunxi_flash read address partition_name read_bytes #0x4007f800 = 0x40080000(kernel entry) - 0x800(boot.img header 2k) boot_partition=boot boot_normal=sunxi_flash read 44800000 ${boot_partition};bootm 44800000 boot_recovery=sunxi_flash read 44800000 extend;bootm 44800000 boot_fastboot=fastboot #recovery key recovery_key_value_max=0x13 recovery_key_value_min=0x10 #fastboot key fastboot_key_value_max=0x8 fastboot_key_value_min=0x2 #uboot system env config bootdelay=1 #default bootcmd, will change at runtime according to key press #default nand boot bootcmd=run setargs_nand boot_normal #verify the kernel verify=N -
回复: 请教关于V821的SPI的问题-设备树发布在 V Series
-
821是 SPIF 控制器连接 NOR Flash,开启SPIF是由uboot动态修改设备树,SPIF是针对NOR,NAND存储器件优化的控制器,读取性能是普通SPI的一倍以上
-
是的
-
-
回复: R128 打包失败 merge_full_rtos_img_failed发布在 MR Series
@cai_yp 分区参数错误,只打包了UDISK分区,但是UDISK是自动生成的分区
32356+0 records in 32356+0 records out 8283136 bytes (8.3 MB) copied, 0.0394041 s, 210 MB/s this is not a partition key update mbr file ok ----------------mbr convert to gpt start--------------------- out: sunxi_gpt_nor.fex source: sunxi_mbr_nor.fex input_logic_offset: 256 input_flash_size: 16M gpt partition entry crc32 = 0x618ebc8 gpt header crc32 = 0x4fdf09e2 GPT----part num 10--- gpt_entry: 128 gpt_header: 92 GPT:env : 120 127 GPT:env-redund : 128 12f GPT:arm-lpsram : 130 a8f GPT:rv-lpsram : a90 1a2f GPT:dsp-hpsram : 1a30 206f GPT:rtos-xip : 2070 33f7 GPT:arm-b : 33f8 3d57 GPT:config : 3d58 3d77 GPT:settings : 3d78 3db7 GPT:UDISK : 3db8 7fff update gpt file ok ----------------mbr convert to gpt end--------------------- boot0: boot0_spinor.fex redund boot0: boot0_spinor.fex mbr: sunxi_gpt_nor.fex partition: sys_partition_nor.bin UDISK_partition_size: 16968 sector outfile: rtos_16Mnor.bin logic_start: 128K total_image_size: 16M load file: boot0_spinor.fex ok load file: sunxi_gpt_nor.fex ok load file: boot0_spinor.fex ok support redund boot0 at 0x10000 load file: sys_partition_nor.bin ok part name=env file name:env.fex part size:8 sector load file: env.fex ok part name=env-redund file name:env.fex part size:8 sector load file: env.fex ok part name=arm-lpsram file name:rtos_arm.fex part size:2400 sector load file: rtos_arm.fex ok part name=rv-lpsram file name:rtos_riscv.fex part size:4000 sector load file: rtos_riscv.fex ok part name=dsp-hpsram file name:rtos_dsp.fex part size:1600 sector load file: rtos_dsp.fex ok part name=rtos-xip file name:rtos_xip_rv.fex part size:5000 sector load file: rtos_xip_rv.fex ok part name=arm-b file name:etf.fex part size:2400 sector load file: etf.fex ok part name=config file name:config.fex part size:32 sector load file: config.fex ok part name=settings part size:64 sector part name=UDISK file name:data_udisk.fex load file: data_udisk.fex ok partname: UDISK this is not a partition key merge_package ok -
回复: MR536 SDK MR536_V1.1直接编译和打包后烧录全志MR536 evk(黄色),报错如下: Unable to handle kernel paging request at virtual address 0000000000040008发布在 MR Series
Unable to handle kernel paging request at virtual address 0000000000040008
看看内核代码rb_next附近,有非法地址访问
-
回复: adb找不到设备发布在 MR Series
目前板子处于烧录下载模式,显示 USB Device (VID_xxxx_PID_xxxx),需要进入系统后才是adb模式,显示 Tina ADB
-
Tina Linux 使用 adb dump、修改设备的 rootfs发布在 MR Series
adb 可用时可以直接读取 /dev/by-name/rootfs 将rootfs导出来
adb pull /dev/by-name/rootfs rootfs.img也可以push到tmp文件夹然后dd写入
adb push rootfs.img /tmp dd if=/tmp/rootfs.img of=/dev/by-name/rootfs -
回复: 請問大大誰有usb驅動程式能下載?发布在 爱搞机专区
@abc16883
下载工具:
AllwinnertechPhoeniSuitRelease20230905.zip下载驱动:
全志USB烧录驱动20201229 -
回复: A133編譯kernel 遇到error trying to exec cc1: execvp : No such file or directory发布在 其它全志芯片讨论区
环境没有安装
Ubuntu 22.04 / 20.04
- 更新软件源,更新系统软件包
sudo apt-get update sudo apt-get upgrade -y- 安装开发依赖
sudo apt-get install build-essential subversion git libncurses5-dev zlib1g-dev gawk flex bison quilt libssl-dev xsltproc libxml-parser-perl mercurial bzr ecj cvs unzip lsof- 安装相关工具
sudo apt-get install kconfig-frontends android-tools-mkbootimg python2 libpython3-dev- 增加架构支持
sudo dpkg --add-architecture i386 sudo apt-get update- 安装支持包
sudo apt install gcc-multilib sudo apt install libc6:i386 libstdc++6:i386 lib32z1Ubuntu 18.04
- 更新软件源,更新系统软件包
sudo apt-get update sudo apt-get upgrade -y- 安装开发依赖
sudo apt-get install build-essential subversion git libncurses5-dev zlib1g-dev gawk flex bison quilt libssl-dev xsltproc libxml-parser-perl mercurial bzr ecj cvs unzip lsof- 安装相关工具
sudo apt-get install android-tools-mkbootimg libpython3-dev- 增加架构支持
sudo dpkg --add-architecture i386 sudo apt-get update- 安装支持包
sudo apt install gcc-multilib sudo apt install libc6:i386 libstdc++6:i386 lib32z1Arch Linux / Manjaro
- 更新软件源,更新系统软件包
pacman -Syyuu- 安装开发依赖
pacman -S --needed base-devel autoconf automake bash binutils bison bzip2 fakeroot file findutils flex gawk gcc gettext git grep groff gzip time unzip util-linux wget which zlib asciidoc help2man intltool perl-extutils-makemaker swig- 安装相关工具
pacman -S --needed libelf libtool libxslt m4 make ncurses openssl patch pkgconf python rsync sed texinfo- 增加架构支持
pacman -S --needed multilib-develCentOS / Fedora / openEuler
sudo dnf --setopt install_weak_deps=False --skip-broken install bash-completion bzip2 gcc gcc-c++ git make ncurses-devel patch rsync tar unzip wget which diffutils python2 python3 perl-base perl-Data-Dumper perl-File-Compare perl-File-Copy perl-FindBin perl-Thread-Queue glibc.i686openSUSE
sudo zypper install --no-recommends asciidoc bash bc binutils bzip2 fastjar flex gawk gcc -
回复: 为什么添加Gstreamer后会报这个错误发布在 MR Series
@uccccc 在 为什么添加Gstreamer后会报这个错误 中说:
@awwwwa 麻烦问一下这个应该怎麼添加,有没有相关的资料亚
-
回复: V851s buildroot openwrt 编译GCC失败发布在 编译和烧写问题专区
@kanken6174 不建议编译gcc进入固件,首先这个gcc没有适配平台,其次v851s的64M内存也无法支持gcc的使用
-
回复: T113 nand flash 启动失败发布在 MR Series
@cwj1986521 内核没有配置UBIFS
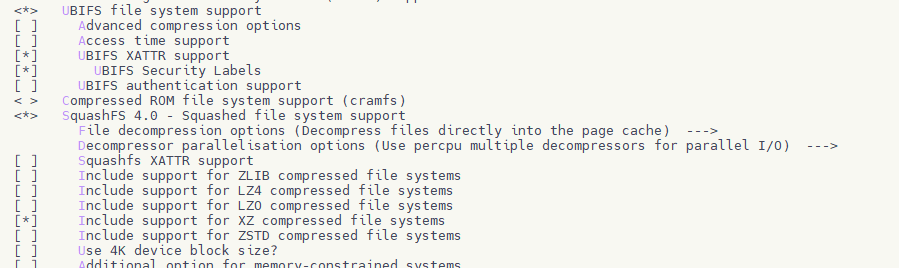
CONFIG_UBIFS_FS=y CONFIG_UBIFS_FS_ADVANCED_COMPR=y # CONFIG_UBIFS_FS_LZO is not set # CONFIG_UBIFS_FS_ZLIB is not set # CONFIG_UBIFS_FS_ZSTD is not set # CONFIG_UBIFS_ATIME_SUPPORT is not set CONFIG_UBIFS_FS_XATTR=y CONFIG_UBIFS_FS_SECURITY=y -
busybox init 简介发布在 Linux
一、简介
tina 使用busybox init方式启动,首先调用执行pseudo_init(挂载文件系统,如/proc、/tmp、/sys /etc、/usr),接着会调用/sbin/init进程,而init进程调用的第一个启动脚本为/etc/init.d/rcS。
二、平台的自定义
不同的平台文件系统具有其共性与特殊性。tina/packge/busybox-init-base-files/files下提供了所有平台的基础文件。而在tina/target/allwinner/XXX/busybox-init-base-files下存放的是平台特性文件,其优先级高于前者,即当前者目录和后者存在有相同文件时,以后者为准。如有以下两个文件:A:tina/target/allwinner/r11-R11_pref1/busybox-init-base-files/etc/banner
B:tina/package/busybox-init-base-files/files/etc/banner最终拷贝到文件系统中的为A。
三、pseudo_init与rcS
pseudo_init与rcS文件中存在很多平台共性的代码,避免系统充斥大量冗余代码,以及方便基础文件的维护和开发。所以不允许在特定平台下自定义pseudo_init、rcS文件(必须使用tina/packge/busybox-init-base-files/files下的pseudo_init、rcS)。
如果需要添加平台特定配置(pseudo_init,rcS没有配置),可将其写到rc.preboot,rc.final中,参考第四节。
四、rcS脚本
1.功能描述
(1)执行/etc/init.d/rc.preboot。
为了满足开机快速启动的需求,提供了用户可自定义rc.preboot文件,即在tina/target/allwinner/XXX/busybox-init-base-files/etc/init.d/目录下创建rc.preboot脚本文件,将会被rcS最先调用执行。
(2)配置打印级别,主机名称。
(3)执行/etc/init.d/rc.log,配置系统log信息。
系统默认使用的是tina/package/busybox-init-base-files/files/etc/init.d/rc.log脚本进行配置系统log信息。用户可在tina/target/allwinner/XXX/busybox-init-base-files/etc/init.d/下创建rc.log,自定义rc.log。
如果需要使用默认rc.log,需要在make menuconfig配置。Base system ---> busybox-init-base-files......................... Busybox init base system ---> [*] Use the rc.log(4)挂载UDISK。
(5)执行/etc/init.d/rc.modules,加载内核模块。
系统默认使用的是tina/package/busybox-init-base-files/files/etc/init.d/rc.modules脚本进行内核模块自加载,用户可在tina/target/allwinner/XXX/busybox-init-base-files/etc/init.d/下创建rc.modules,自定义rc.modules。
如果需要使用默认rc.modules,需要在make menuconfig配置如下。Base system ---> busybox-init-base-files......................... Busybox init base system ---> [*] Use the rc.modules(6)启动/etc/rc.d下的脚本。
关于执行rc.d下的启动脚本,目的为兼容procd式的应用脚本。/etc/rc.d下的脚本是链接到/etc/init.d/下,默认情况下只执行adbd,如果需要执行其他脚本,需要在tina/target/allwinner/XXX/busybox-init-base-files/etc/init.d/下,自定义load_script.conf文件,文件内容中写上要启动的应用,如adbd(注意,每一个应用占一行)。可参考:tina/packge/busybox-init-base-files/files/etc/init.d/load_script.conf。如果需要执行rc.d下的启动脚本,需要在make menuconfig做如下配置。 Base system ---> busybox-init-base-files......................... Busybox init base system ---> [*] Auto load the script in /etc/rc.d(7)ota初始化。
(8)执行/etc/init.d/rc.final,用户自定义启动脚本。
用户可在tina/packge/busybox-init-base-files/files/etc/init.d/下创建一个rc.final脚本,自定义启动应用程序,该脚本将会被rcS最后调用执行。2.rc.preboot与rc.final的区别?
rc.preboot比rc.final先运行,在执行rc.preboot脚本的时候,系统的一些初始化操作还没完成,如挂载UDISK、内核模块自加载、ota等等操作。而rc.final执行的时候,以上的初始化操作已经完成。五.如何写应用的启动脚本
example:开机自启动smartlinkd(tina/package/allwinner/smartlinkd/files/smartlinkd.init)
1.方法一(特定格式要求)详细的格式参考:
https://wiki.openwrt.org/inbox/procd-init-scripts
https://wiki.openwrt.org/doc/techref/initscripts(1)procd式
#!/bin/sh /etc/rc.common #本质为script脚本,以#!开头, 之后执行/etc/rc.common START=98 #开机启动优先级(序列) [数值越小, 越先启动] STOP=98 #关机停止优先级(序列) [数值越小, 越先关闭] USE_PROCD=1 PROG=smartlinkd start_service() { #启动函数 procd_open_instance procd_set_param command $PROG -d procd_close_instance } shutdown() { echo shutdown }(2)Sys式
#!/bin/sh /etc/rc.common START=98 STOP=98 PROG=smartlinkd start() { smartlinkd -d & }使用上述procd式和sys式脚本,既能兼容procd init启动和busybox init的启动方式。
另外如果使用的是busybox init的启动方式,还需要在load_script.conf文件中换行添加内容:smartlinkd2.方法二(无特定格式要求)
创建rc.preboot或者rc.final脚本,添加启动smartlinkd的内容。 -
回复: 烧录识别不了usb提示:module awusb:gnu.linkonce.this module section size must match the kernel's built struct module size at run time发布在 编译和烧写问题专区
内核版本不匹配,请更换Ubuntu内核版本到5.15.y,目前你是6.5
-
回复: T113 nand flash 启动失败发布在 MR Series
@cwj1986521 需要用 make kernel_menuconfig,如果使用的是build.sh 需要 ./build.sh menuconfig
内核配置文件会被SDK覆盖,进入内核文件夹修改的均无效
-
T113 busybox init 配置 overlayfs 为 UDISK 分区而不是 rootfs_data发布在 Linux
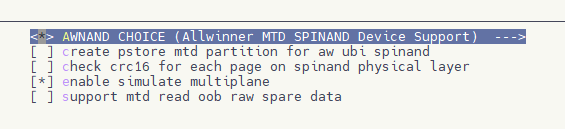
- 先确定挂载overlayfs
查看 pseudo_init 中 MOUNT_OVERLAY 是不是 1,如果不是配置为 1
package/busybox-init-base-files/files/pseudo_init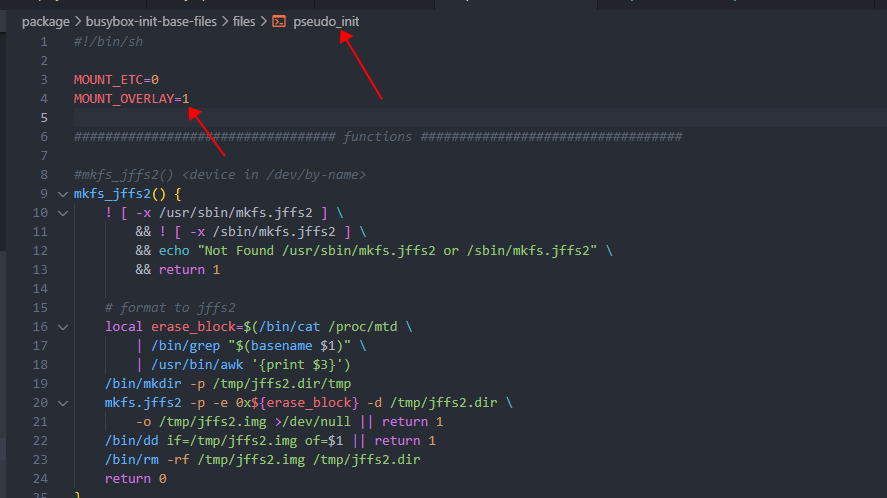
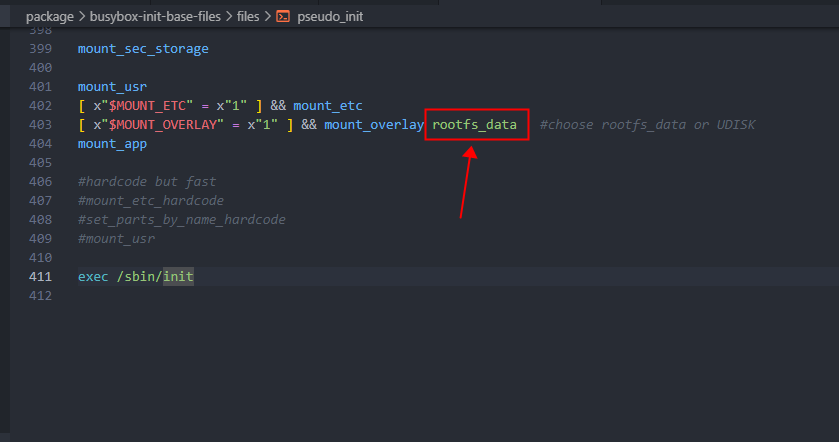
- 修改挂载分区
找到文件末尾,吧 rootfs_data 改成UDISK
-
回复: DragonFace V4.1.0哪里有下载,你们搞的也太封闭了吧。。。发布在 其它全志芯片讨论区
使用APST量产工具下载,APST下载地址https://open.allwinnertech.com/

-
回复: t113使用sd卡启动卡住了发布在 Linux
@xingxing8 在 t113使用sd卡启动卡住了 中说:
先看这行
VFS: Cannot open root device "mmcblk0p5" or unknown-block(0,0): error -6
这行表示没有挂载上mmc设备
再往上找
[ 4.002919] sunxi-mmc 4020000.sdmmc: Got CD GPIO
[ 4.008458] sunxi-mmc 4020000.sdmmc: set cd-gpios as 24M fail
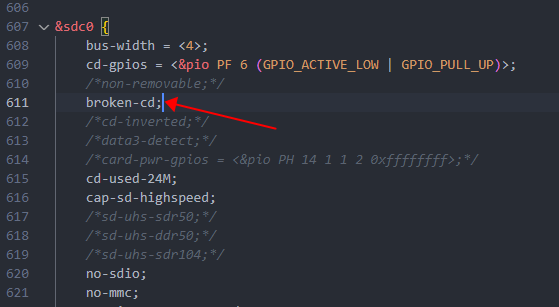
[ 4.018859] sunxi-mmc 4020000.sdmmc: sdc set ios:clk 0Hz bm PP pm UP vdd 21 width 1 timing LEGACY(SDR12) dt BCD卡检测GPIO检测不到卡,关闭MMC驱动
Linux中的驱动为了省电会根据CD引脚检测卡是否存在,不存在则关闭MMC驱动,U-boot驱动没有这个逻辑
解决方法:
- 正向解决法
- 根据实物硬件查看CD引脚配置,上下拉状态是否正常,是否反转CD
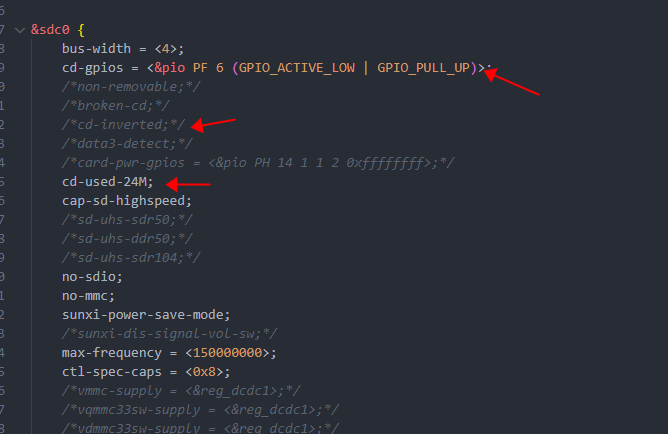
- 软件规避法
- 直接关闭CD检测功能,取消注释
broken-cd;
-
回复: 【T113 S3】【spi驱动】【DMA 连续内存分配】【dma_alloc_coherent】【失败】发布在 其它全志芯片讨论区
参考 G2D 驱动做下修改
lichee/linux-5.4/drivers/char/sunxi_g2d/g2d_rcq/g2d.cvoid *g2d_malloc(__u32 bytes_num, __u32 *phy_addr) { void *address = NULL; #if defined(CONFIG_ION) u32 actual_bytes; if (bytes_num != 0) { actual_bytes = G2D_BYTE_ALIGN(bytes_num); address = dma_alloc_coherent(para.dev, actual_bytes, (dma_addr_t *) phy_addr, GFP_KERNEL); if (address) { return address; } G2D_ERR_MSG("dma_alloc_coherent fail, size=0x%x\n", bytes_num); return NULL; } G2D_ERR_MSG("size is zero\n"); #else unsigned int map_size = 0; struct page *page; if (bytes_num != 0) { map_size = PAGE_ALIGN(bytes_num); page = alloc_pages(GFP_KERNEL, get_order(map_size)); if (page != NULL) { address = page_address(page); if (address == NULL) { free_pages((unsigned long)(page), get_order(map_size)); G2D_ERR_MSG("page_address fail!\n"); return NULL; } *phy_addr = virt_to_phys(address); return address; } G2D_ERR_MSG("alloc_pages fail!\n"); return NULL; } G2D_ERR_MSG("size is zero\n"); #endif return NULL; }目前看到 dma_alloc_coherent(NULL, xxx...) 的第一个参数是NULL,正常来说应该分配设备而不是NULL。
-
回复: OpenixCard - 在 Linux 系统刷写全志镜像到 SD 卡发布在 编译和烧写问题专区
@yunyisa 自制的固件无法打包成全志的镜像,只能由SDK生成,全志镜像有专有的封装格式,不仅仅是地址偏移
-
回复: D1s DMA驱动Ledc 问题发布在 MR Series
// SPDX-License-Identifier: GPL-2.0-only /* * drivers/leds/leds-sunxi.c - Allwinner RGB LED Driver * * Copyright (C) 2018 Allwinner Technology Limited. All rights reserved. * http://www.allwinnertech.com * *Author : Albert Yu <yuxyun@allwinnertech.com> * Lewis <liuyu@allwinnertech.com> * This program is free software; you can redistribute it and/or modify * it under the terms of the GNU General Public License version 2 as * published by the Free Software Foundation. * */ #include <linux/module.h> #include <linux/delay.h> #include <linux/leds.h> #include <linux/io.h> #include <linux/of.h> #include <linux/slab.h> #include <linux/clk.h> #include <linux/dmaengine.h> #include <linux/interrupt.h> #include <linux/platform_device.h> #include <linux/pinctrl/consumer.h> #include <linux/dma-mapping.h> #include <linux/debugfs.h> #include <linux/uaccess.h> #include <linux/delay.h> #include <linux/regulator/consumer.h> #include <linux/reset.h> #if IS_ENABLED(CONFIG_PM) #include <linux/pm.h> #endif #include "leds-sunxi.h" /* For debug */ #define LED_ERR(fmt, arg...) pr_err("%s()%d - "fmt, __func__, __LINE__, ##arg) #define dprintk(level_mask, fmt, arg...) \ do { \ if (unlikely(debug_mask & level_mask)) \ pr_warn("%s()%d - "fmt, __func__, __LINE__, ##arg); \ } while (0) static u32 debug_mask = 1; static struct sunxi_led *sunxi_led_global; static struct class *led_class; #define sunxi_slave_id(d, s) (((d)<<16) | (s)) /*For Driver */ static void led_dump_reg(struct sunxi_led *led, u32 offset, u32 len) { u32 i; u8 buf[64], cnt = 0; for (i = 0; i < len; i = i + REG_INTERVAL) { if (i%HEXADECIMAL == 0) cnt += sprintf(buf + cnt, "0x%08x: ", (u32)(led->res->start + offset + i)); cnt += sprintf(buf + cnt, "%08x ", readl(led->iomem_reg_base + offset + i)); if (i%HEXADECIMAL == REG_CL) { pr_warn("%s\n", buf); cnt = 0; } } } static void sunxi_clk_get(struct sunxi_led *led) { struct device *dev = led->dev; struct device_node *np = dev->of_node; led->clk_ledc = of_clk_get(np, 0); if (IS_ERR(led->clk_ledc)) LED_ERR("failed to get clk_ledc!\n"); led->clk_cpuapb = of_clk_get(np, 1); if (IS_ERR(led->clk_cpuapb)) LED_ERR("failed to get clk_cpuapb!\n"); } static void sunxi_clk_put(struct sunxi_led *led) { clk_put(led->clk_ledc); clk_put(led->clk_cpuapb); led->clk_ledc = NULL; led->clk_cpuapb = NULL; } static void sunxi_clk_enable(struct sunxi_led *led) { clk_prepare_enable(led->clk_ledc); clk_prepare_enable(led->clk_cpuapb); } static void sunxi_clk_disable(struct sunxi_led *led) { clk_disable_unprepare(led->clk_ledc); } static void sunxi_clk_init(struct sunxi_led *led) { sunxi_clk_get(led); sunxi_clk_enable(led); } static void sunxi_clk_deinit(struct sunxi_led *led) { sunxi_clk_disable(led); sunxi_clk_put(led); } static u32 sunxi_get_reg(int offset) { struct sunxi_led *led = sunxi_led_global; u32 value = ioread32(((u8 *)led->iomem_reg_base) + offset); return value; } static void sunxi_set_reg(int offset, u32 value) { struct sunxi_led *led = sunxi_led_global; iowrite32(value, ((u8 *)led->iomem_reg_base) + offset); } static inline void sunxi_set_reset_ns(struct sunxi_led *led) { u32 n, reg_val; u32 mask = 0x1FFF; u32 min = SUNXI_RESET_TIME_MIN_NS; u32 max = SUNXI_RESET_TIME_MAX_NS; if (led->reset_ns < min || led->reset_ns > max) { LED_ERR("invalid parameter, reset_ns should be %u-%u!\n", min, max); return; } n = (led->reset_ns - 42) / 42; reg_val = sunxi_get_reg(LED_RESET_TIMING_CTRL_REG_OFFSET); reg_val &= ~(mask << 16); reg_val |= (n << 16); sunxi_set_reg(LED_RESET_TIMING_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_set_t1h_ns(struct sunxi_led *led) { u32 n, reg_val; u32 mask = 0x3F; u32 shift = 21; u32 min = SUNXI_T1H_MIN_NS; u32 max = SUNXI_T1H_MAX_NS; if (led->t1h_ns < min || led->t1h_ns > max) { LED_ERR("invalid parameter, t1h_ns should be %u-%u!\n", min, max); return; } n = (led->t1h_ns - 42) / 42; reg_val = sunxi_get_reg(LED_T01_TIMING_CTRL_REG_OFFSET); reg_val &= ~(mask << shift); reg_val |= n << shift; sunxi_set_reg(LED_T01_TIMING_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_set_t1l_ns(struct sunxi_led *led) { u32 n, reg_val; u32 mask = 0x1F; u32 shift = 16; u32 min = SUNXI_T1L_MIN_NS; u32 max = SUNXI_T1L_MAX_NS; if (led->t1l_ns < min || led->t1l_ns > max) { LED_ERR("invalid parameter, t1l_ns should be %u-%u!\n", min, max); return; } n = (led->t1l_ns - 42) / 42; reg_val = sunxi_get_reg(LED_T01_TIMING_CTRL_REG_OFFSET); reg_val &= ~(mask << shift); reg_val |= n << shift; sunxi_set_reg(LED_T01_TIMING_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_set_t0h_ns(struct sunxi_led *led) { u32 n, reg_val; u32 mask = 0x1F; u32 shift = 6; u32 min = SUNXI_T0H_MIN_NS; u32 max = SUNXI_T0H_MAX_NS; if (led->t0h_ns < min || led->t0h_ns > max) { LED_ERR("invalid parameter, t0h_ns should be %u-%u!\n", min, max); return; } n = (led->t0h_ns - 42) / 42; reg_val = sunxi_get_reg(LED_T01_TIMING_CTRL_REG_OFFSET); reg_val &= ~(mask << shift); reg_val |= n << shift; sunxi_set_reg(LED_T01_TIMING_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_set_t0l_ns(struct sunxi_led *led) { u32 n, reg_val; u32 min = SUNXI_T0L_MIN_NS; u32 max = SUNXI_T0L_MAX_NS; if (led->t0l_ns < min || led->t0l_ns > max) { LED_ERR("invalid parameter, t0l_ns should be %u-%u!\n", min, max); return; } n = (led->t0l_ns - 42) / 42; reg_val = sunxi_get_reg(LED_T01_TIMING_CTRL_REG_OFFSET); reg_val &= ~0x3F; reg_val |= n; sunxi_set_reg(LED_T01_TIMING_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_set_wait_time0_ns(struct sunxi_led *led) { u32 n, reg_val; u32 min = SUNXI_WAIT_TIME0_MIN_NS; u32 max = SUNXI_WAIT_TIME0_MAX_NS; if (led->wait_time0_ns < min || led->wait_time0_ns > max) { LED_ERR("invalid parameter, wait_time0_ns should be %u-%u!\n", min, max); return; } n = (led->wait_time0_ns - 42) / 42; reg_val = (1 << 8) | n; sunxi_set_reg(LEDC_WAIT_TIME0_CTRL_REG, reg_val); } static inline void sunxi_set_wait_time1_ns(struct sunxi_led *led) { unsigned long long tmp, max = SUNXI_WAIT_TIME1_MAX_NS; u32 min = SUNXI_WAIT_TIME1_MIN_NS; u32 n, reg_val; if (led->wait_time1_ns < min || led->wait_time1_ns > max) { LED_ERR("invalid parameter, wait_time1_ns should be %u-%llu!\n", min, max); return; } tmp = led->wait_time1_ns; n = div_u64(tmp, 42); n -= 1; reg_val = (1 << 31) | n; sunxi_set_reg(LEDC_WAIT_TIME1_CTRL_REG, reg_val); } static inline void sunxi_set_wait_data_time_ns(struct sunxi_led *led) { u32 min, max; #ifndef SUNXI_FPGA_LEDC u32 mask = 0x1FFF, shift = 16, reg_val = 0, n; #endif min = SUNXI_WAIT_DATA_TIME_MIN_NS; #ifdef SUNXI_FPGA_LEDC /* * For FPGA platforms, it is easy to meet wait data timeout for * the obvious latency of task which is because of less cpu cores * and lower cpu frequency compared with IC platforms, so here we * permit long enough time latency. */ max = SUNXI_WAIT_DATA_TIME_MAX_NS_FPGA; #else /* SUNXI_FPGA_LEDC */ max = SUNXI_WAIT_DATA_TIME_MAX_NS_IC; #endif /* SUNXI_FPGA_LEDC */ if (led->wait_data_time_ns < min || led->wait_data_time_ns > max) { LED_ERR("invalid parameter, wait_data_time_ns should be %u-%u!\n", min, max); return; } #ifndef SUNXI_FPGA_LEDC n = (led->wait_data_time_ns - 42) / 42; reg_val &= ~(mask << shift); reg_val |= (n << shift); sunxi_set_reg(LEDC_DATA_FINISH_CNT_REG_OFFSET, reg_val); #endif /* SUNXI_FPGA_LEDC */ } static void sunxi_ledc_set_time(struct sunxi_led *led) { sunxi_set_reset_ns(led); sunxi_set_t1h_ns(led); sunxi_set_t1l_ns(led); sunxi_set_t0h_ns(led); sunxi_set_t0l_ns(led); sunxi_set_wait_time0_ns(led); sunxi_set_wait_time1_ns(led); sunxi_set_wait_data_time_ns(led); } static void sunxi_ledc_set_length(struct sunxi_led *led) { u32 reg_val; u32 length = led->length; if (length == 0) return; if (length > led->led_count) return; reg_val = sunxi_get_reg(LEDC_CTRL_REG_OFFSET); reg_val &= ~(0x1FFF << 16); reg_val |= length << 16; sunxi_set_reg(LEDC_CTRL_REG_OFFSET, reg_val); reg_val = sunxi_get_reg(LED_RESET_TIMING_CTRL_REG_OFFSET); reg_val &= ~0x3FF; reg_val |= length - 1; sunxi_set_reg(LED_RESET_TIMING_CTRL_REG_OFFSET, reg_val); } static void sunxi_ledc_set_output_mode(struct sunxi_led *led, const char *str) { u32 val; u32 mask = 0x7; u32 shift = 6; u32 reg_val = sunxi_get_reg(LEDC_CTRL_REG_OFFSET); if (str != NULL) { if (!strncmp(str, "GRB", 3)) val = SUNXI_OUTPUT_GRB; else if (!strncmp(str, "GBR", 3)) val = SUNXI_OUTPUT_GBR; else if (!strncmp(str, "RGB", 3)) val = SUNXI_OUTPUT_RGB; else if (!strncmp(str, "RBG", 3)) val = SUNXI_OUTPUT_RBG; else if (!strncmp(str, "BGR", 3)) val = SUNXI_OUTPUT_BGR; else if (!strncmp(str, "BRG", 3)) val = SUNXI_OUTPUT_BRG; else return; } else { val = led->output_mode.val; } reg_val &= ~(mask << shift); reg_val |= val; sunxi_set_reg(LEDC_CTRL_REG_OFFSET, reg_val); if (str != NULL) { if (strncmp(str, led->output_mode.str, 3)) memcpy(led->output_mode.str, str, 3); } if (val != led->output_mode.val) led->output_mode.val = val; } static void sunxi_ledc_enable_irq(u32 mask) { u32 reg_val = 0; reg_val |= mask; sunxi_set_reg(LEDC_INT_CTRL_REG_OFFSET, reg_val); } static void sunxi_ledc_disable_irq(u32 mask) { u32 reg_val = 0; reg_val = sunxi_get_reg(LEDC_INT_CTRL_REG_OFFSET); reg_val &= ~mask; sunxi_set_reg(LEDC_INT_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_ledc_enable(struct sunxi_led *led) { u32 reg_val; reg_val = sunxi_get_reg(LEDC_CTRL_REG_OFFSET); reg_val |= 1; sunxi_set_reg(LEDC_CTRL_REG_OFFSET, reg_val); } static inline void sunxi_ledc_reset(struct sunxi_led *led) { u32 reg_val = sunxi_get_reg(LEDC_CTRL_REG_OFFSET); sunxi_ledc_disable_irq(LEDC_TRANS_FINISH_INT_EN | LEDC_FIFO_CPUREQ_INT_EN | LEDC_WAITDATA_TIMEOUT_INT_EN | LEDC_FIFO_OVERFLOW_INT_EN | LEDC_GLOBAL_INT_EN); if (debug_mask & DEBUG_INFO2) { dprintk(DEBUG_INFO2, "dump reg:\n"); led_dump_reg(led, 0, 0x30); } reg_val |= 1 << 1; sunxi_set_reg(LEDC_CTRL_REG_OFFSET, reg_val); } #ifdef CONFIG_DEBUG_FS static ssize_t reset_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_RESET_TIME_MIN_NS; max = SUNXI_RESET_TIME_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->reset_ns = val; sunxi_set_reset_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, reset_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t reset_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->reset_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations reset_ns_fops = { .owner = THIS_MODULE, .write = reset_ns_write, .read = reset_ns_read, }; static ssize_t t1h_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_T1H_MIN_NS; max = SUNXI_T1H_MAX_NS; if (count >= sizeof(buffer)) return -EINVAL; if (copy_from_user(buffer, buf, count)) return -EFAULT; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) return -EINVAL; if (val < min || val > max) goto err_out; led->t1h_ns = val; sunxi_set_t1h_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, t1h_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t t1h_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->t1h_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations t1h_ns_fops = { .owner = THIS_MODULE, .write = t1h_ns_write, .read = t1h_ns_read, }; static ssize_t t1l_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_T1L_MIN_NS; max = SUNXI_T1L_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->t1l_ns = val; sunxi_set_t1l_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, t1l_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t t1l_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->t1l_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations t1l_ns_fops = { .owner = THIS_MODULE, .write = t1l_ns_write, .read = t1l_ns_read, }; static ssize_t t0h_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_T0H_MIN_NS; max = SUNXI_T0H_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->t0h_ns = val; sunxi_set_t0h_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, t0h_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t t0h_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->t0h_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations t0h_ns_fops = { .owner = THIS_MODULE, .write = t0h_ns_write, .read = t0h_ns_read, }; static ssize_t t0l_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_T0L_MIN_NS; max = SUNXI_T0L_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->t0l_ns = val; sunxi_set_t0l_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, t0l_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t t0l_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->t0l_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations t0l_ns_fops = { .owner = THIS_MODULE, .write = t0l_ns_write, .read = t0l_ns_read, }; static ssize_t wait_time0_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_WAIT_TIME0_MIN_NS; max = SUNXI_WAIT_TIME0_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->wait_time0_ns = val; sunxi_set_wait_time0_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, wait_time0_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t wait_time0_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->wait_time0_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations wait_time0_ns_fops = { .owner = THIS_MODULE, .write = wait_time0_ns_write, .read = wait_time0_ns_read, }; static ssize_t wait_time1_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min; unsigned long long max; unsigned long long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_WAIT_TIME1_MIN_NS; max = SUNXI_WAIT_TIME1_MAX_NS; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoull(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->wait_time1_ns = val; sunxi_set_wait_time1_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, wait_time1_ns should be %u-%lld!\n", min, max); return -EINVAL; } static ssize_t wait_time1_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%lld\n", led->wait_time1_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations wait_time1_ns_fops = { .owner = THIS_MODULE, .write = wait_time1_ns_write, .read = wait_time1_ns_read, }; static ssize_t wait_data_time_ns_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { int err; char buffer[64]; u32 min, max; unsigned long val; struct sunxi_led *led = sunxi_led_global; min = SUNXI_WAIT_DATA_TIME_MIN_NS; #ifdef SUNXI_FPGA_LEDC max = SUNXI_WAIT_DATA_TIME_MAX_NS_FPGA; #else max = SUNXI_WAIT_DATA_TIME_MAX_NS_IC; #endif if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; err = kstrtoul(buffer, 10, &val); if (err) goto err_out; if (val < min || val > max) goto err_out; led->wait_data_time_ns = val; sunxi_set_wait_data_time_ns(led); *offp += count; return count; err_out: LED_ERR("invalid parameter, wait_data_time_ns should be %u-%u!\n", min, max); return -EINVAL; } static ssize_t wait_data_time_ns_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%u\n", led->wait_data_time_ns); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations wait_data_time_ns_fops = { .owner = THIS_MODULE, .write = wait_data_time_ns_write, .read = wait_data_time_ns_read, }; static int data_show(struct seq_file *s, void *data) { int i; struct sunxi_led *led = sunxi_led_global; for (i = 0; i < led->led_count; i++) { if (!(i % 4)) { if (i + 4 <= led->led_count) seq_printf(s, "%04d-%04d", i, i + 4); else seq_printf(s, "%04d-%04d", i, led->led_count); } seq_printf(s, " 0x%08x", led->data[i]); if (((i % 4) == 3) || (i == led->led_count - 1)) seq_puts(s, "\n"); } return 0; } static int data_open(struct inode *inode, struct file *file) { return single_open(file, data_show, inode->i_private); } static const struct file_operations data_fops = { .owner = THIS_MODULE, .open = data_open, .read = seq_read, .llseek = seq_lseek, .release = single_release, }; static ssize_t output_mode_write(struct file *filp, const char __user *buf, size_t count, loff_t *offp) { char buffer[64]; struct sunxi_led *led = sunxi_led_global; if (count >= sizeof(buffer)) goto err_out; if (copy_from_user(buffer, buf, count)) goto err_out; buffer[count] = '\0'; sunxi_ledc_set_output_mode(led, buffer); *offp += count; return count; err_out: LED_ERR("invalid parameter!\n"); return -EINVAL; } static ssize_t output_mode_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; struct sunxi_led *led = sunxi_led_global; r = snprintf(buffer, 64, "%s\n", led->output_mode.str); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations output_mode_fops = { .owner = THIS_MODULE, .write = output_mode_write, .read = output_mode_read, }; static ssize_t hwversion_read(struct file *filp, char __user *buf, size_t count, loff_t *offp) { int r; char buffer[64]; u32 reg_val, major_ver, minor_ver; reg_val = sunxi_get_reg(LEDC_VER_NUM_REG); major_ver = reg_val >> 16; minor_ver = reg_val & 0xF; r = snprintf(buffer, 64, "r%up%u\n", major_ver, minor_ver); return simple_read_from_buffer(buf, count, offp, buffer, r); } static const struct file_operations hwversion_fops = { .owner = THIS_MODULE, .read = hwversion_read, }; static void sunxi_led_create_debugfs(struct sunxi_led *led) { struct dentry *debugfs_dir, *debugfs_file; debugfs_dir = debugfs_create_dir("sunxi_leds", NULL); if (IS_ERR_OR_NULL(debugfs_dir)) { LED_ERR("debugfs_create_dir failed!\n"); return; } led->debugfs_dir = debugfs_dir; debugfs_file = debugfs_create_file("reset_ns", 0660, debugfs_dir, NULL, &reset_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for reset_ns failed!\n"); debugfs_file = debugfs_create_file("t1h_ns", 0660, debugfs_dir, NULL, &t1h_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for t1h_ns failed!\n"); debugfs_file = debugfs_create_file("t1l_ns", 0660, debugfs_dir, NULL, &t1l_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for t1l_ns failed!\n"); debugfs_file = debugfs_create_file("t0h_ns", 0660, debugfs_dir, NULL, &t0h_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for t0h_ns failed!\n"); debugfs_file = debugfs_create_file("t0l_ns", 0660, debugfs_dir, NULL, &t0l_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for t0l_ns failed!\n"); debugfs_file = debugfs_create_file("wait_time0_ns", 0660, debugfs_dir, NULL, &wait_time0_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for wait_time0_ns failed!\n"); debugfs_file = debugfs_create_file("wait_time1_ns", 0660, debugfs_dir, NULL, &wait_time1_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for wait_time1_ns failed!\n"); debugfs_file = debugfs_create_file("wait_data_time_ns", 0660, debugfs_dir, NULL, &wait_data_time_ns_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for wait_data_time_ns failed!\n"); debugfs_file = debugfs_create_file("data", 0440, debugfs_dir, NULL, &data_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for data failed!\n"); debugfs_file = debugfs_create_file("output_mode", 0660, debugfs_dir, NULL, &output_mode_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for output_mode failed!\n"); if (!debugfs_file) LED_ERR("debugfs_create_file for trans_mode failed!\n"); debugfs_file = debugfs_create_file("hwversion", 0440, debugfs_dir, NULL, &hwversion_fops); if (!debugfs_file) LED_ERR("debugfs_create_file for hwversion failed!\n"); } static void sunxi_led_remove_debugfs(struct sunxi_led *led) { debugfs_remove_recursive(led->debugfs_dir); } #endif /* CONFIG_DEBUG_FS */ static void sunxi_ledc_set_dma_mode(struct sunxi_led *led) { u32 reg_val = 0; reg_val |= 1 << 5; sunxi_set_reg(LEDC_DMA_CTRL_REG, reg_val); sunxi_ledc_disable_irq(LEDC_FIFO_CPUREQ_INT_EN); } static void sunxi_ledc_set_cpu_mode(struct sunxi_led *led) { u32 reg_val = 0; reg_val &= ~(1 << 5); sunxi_set_reg(LEDC_DMA_CTRL_REG, reg_val); sunxi_ledc_enable_irq(LEDC_FIFO_CPUREQ_INT_EN); } static void sunxi_ledc_dma_callback(void *param) { dprintk(DEBUG_INFO, "finish\n"); } static void sunxi_ledc_trans_data(struct sunxi_led *led) { int i, err; size_t size; unsigned long flags; phys_addr_t dst_addr; struct dma_slave_config slave_config; struct device *dev = led->dev; struct dma_async_tx_descriptor *dma_desc; /* less than 32 lights use cpu transmission. */ /* more than 32 lights use dma transmission. */ if (led->length <= SUNXI_LEDC_FIFO_DEPTH) { dprintk(DEBUG_INFO, "cpu xfer\n"); ktime_get_coarse_real_ts64(&(led->start_time)); sunxi_ledc_set_time(led); sunxi_ledc_set_output_mode(led, led->output_mode.str); sunxi_ledc_set_cpu_mode(led); sunxi_ledc_set_length(led); sunxi_ledc_enable_irq(LEDC_TRANS_FINISH_INT_EN | LEDC_WAITDATA_TIMEOUT_INT_EN | LEDC_FIFO_OVERFLOW_INT_EN | LEDC_GLOBAL_INT_EN); sunxi_ledc_enable(led); for (i = 0; i < led->length; i++) sunxi_set_reg(LEDC_DATA_REG_OFFSET, led->data[i]); } else { dprintk(DEBUG_INFO, "dma xfer\n"); size = led->length * 4; led->src_dma = dma_map_single(dev, led->data, size, DMA_TO_DEVICE); dst_addr = led->res->start + LEDC_DATA_REG_OFFSET; flags = DMA_PREP_INTERRUPT | DMA_CTRL_ACK; slave_config.direction = DMA_MEM_TO_DEV; slave_config.src_addr = led->src_dma; slave_config.dst_addr = dst_addr; slave_config.src_addr_width = DMA_SLAVE_BUSWIDTH_4_BYTES; slave_config.dst_addr_width = DMA_SLAVE_BUSWIDTH_4_BYTES; slave_config.src_maxburst = 4; slave_config.dst_maxburst = 4; err = dmaengine_slave_config(led->dma_chan, &slave_config); if (err < 0) { LED_ERR("dmaengine_slave_config failed!\n"); return; } dma_desc = dmaengine_prep_slave_single(led->dma_chan, led->src_dma, size, DMA_MEM_TO_DEV, flags); if (!dma_desc) { LED_ERR("dmaengine_prep_slave_single failed!\n"); return; } dma_desc->callback = sunxi_ledc_dma_callback; dmaengine_submit(dma_desc); dma_async_issue_pending(led->dma_chan); ktime_get_coarse_real_ts64(&(led->start_time)); sunxi_ledc_set_time(led); sunxi_ledc_set_output_mode(led, led->output_mode.str); sunxi_ledc_set_dma_mode(led); sunxi_ledc_set_length(led); sunxi_ledc_enable_irq(LEDC_TRANS_FINISH_INT_EN | LEDC_WAITDATA_TIMEOUT_INT_EN | LEDC_FIFO_OVERFLOW_INT_EN | LEDC_GLOBAL_INT_EN); sunxi_ledc_enable(led); } } static inline void sunxi_ledc_clear_all_irq(void) { u32 reg_val = sunxi_get_reg(LEDC_INT_STS_REG_OFFSET); reg_val &= ~0x1F; sunxi_set_reg(LEDC_INT_STS_REG_OFFSET, reg_val); } static inline void sunxi_ledc_clear_irq(enum sunxi_ledc_irq_status_reg irq) { u32 reg_val = sunxi_get_reg(LEDC_INT_STS_REG_OFFSET); reg_val &= ~irq; sunxi_set_reg(LEDC_INT_STS_REG_OFFSET, reg_val); } static int sunxi_ledc_complete(struct sunxi_led *led) { unsigned long flags = 0; unsigned long timeout = 0; u32 reg_val; /*wait_event_timeout return 0 : timeout *wait_event_timeout return > 0 : thr left time * */ timeout = wait_event_timeout(led->wait, led->result, 5*HZ); if (timeout == 0) { reg_val = sunxi_get_reg(LEDC_INT_STS_REG_OFFSET); pr_err("LEDC INTERRUPT STATUS REG IS %x", reg_val); LED_ERR("led xfer timeout\n"); reg_val = sunxi_get_reg(LEDC_INT_STS_REG_OFFSET); pr_err("LEDC INTERRUPT STATUS REG IS %x", reg_val); return -ETIME; } else if (led->result == RESULT_ERR) { return -ECOMM; } dprintk(DEBUG_INFO, "xfer complete\n"); spin_lock_irqsave(&led->lock, flags); led->result = 0; spin_unlock_irqrestore(&led->lock, flags); return 0; } static irqreturn_t sunxi_ledc_irq_handler(int irq, void *dev_id) { long delta_time_ns; u32 irq_status, max_ns; struct sunxi_led *led = sunxi_led_global; struct device *dev = led->dev; struct timespec64 current_time; spin_lock(&led->lock); irq_status = sunxi_get_reg(LEDC_INT_STS_REG_OFFSET); sunxi_ledc_clear_all_irq(); if (irq_status & LEDC_TRANS_FINISH_INT) { sunxi_ledc_reset(led); led->result = RESULT_COMPLETE; goto out; } if (irq_status & LEDC_WAITDATA_TIMEOUT_INT) { ktime_get_coarse_real_ts64(¤t_time); delta_time_ns = current_time.tv_sec - led->start_time.tv_sec; delta_time_ns *= 1000 * 1000 * 1000; delta_time_ns += current_time.tv_nsec - led->start_time.tv_nsec; max_ns = led->wait_data_time_ns; if (delta_time_ns <= max_ns) { spin_unlock(&led->lock); return IRQ_HANDLED; } sunxi_ledc_reset(led); if (delta_time_ns <= max_ns * 2) { sunxi_ledc_trans_data(led); } else { LED_ERR("wait time is more than %d ns," "going to reset ledc and drop this operation!\n", max_ns); led->result = RESULT_ERR; } goto out; } if (irq_status & LEDC_FIFO_OVERFLOW_INT) { LED_ERR("there exists fifo overflow issue, irq_status=0x%x!\n", irq_status); sunxi_ledc_reset(led); led->result = RESULT_ERR; goto out; } out: if (led->dma_chan) dma_unmap_single(dev, led->src_dma, led->length * 4, DMA_TO_DEVICE); wake_up(&led->wait); led->length = 0; spin_unlock(&led->lock); return IRQ_HANDLED; } static int sunxi_ledc_irq_init(struct sunxi_led *led) { int err; struct device *dev = led->dev; unsigned long flags = 0; const char *name = "ledcirq"; struct platform_device *pdev; pdev = container_of(dev, struct platform_device, dev); spin_lock_init(&led->lock); led->irqnum = platform_get_irq(pdev, 0); if (led->irqnum < 0) LED_ERR("failed to get ledc irq!\n"); err = request_irq(led->irqnum, sunxi_ledc_irq_handler, flags, name, dev); if (err) { LED_ERR("failed to install IRQ handler for irqnum %d\n", led->irqnum); return -EPERM; } return 0; } static void sunxi_ledc_irq_deinit(struct sunxi_led *led) { free_irq(led->irqnum, led->dev); sunxi_ledc_disable_irq(LEDC_TRANS_FINISH_INT_EN | LEDC_FIFO_CPUREQ_INT_EN | LEDC_WAITDATA_TIMEOUT_INT_EN | LEDC_FIFO_OVERFLOW_INT_EN | LEDC_GLOBAL_INT_EN); } static void sunxi_ledc_pinctrl_init(struct sunxi_led *led) { struct device *dev = led->dev; struct pinctrl *pinctrl = devm_pinctrl_get_select_default(dev); led->pctrl = pinctrl; if (IS_ERR(pinctrl)) LED_ERR("devm_pinctrl_get_select_default failed!\n"); } static int led_regulator_request(struct sunxi_led *led) { struct regulator *regu = NULL; /* Consider "n*" as nocare. Support "none", "nocare", "null", "" etc. */ if ((led->regulator_id[0] == 'n') || (led->regulator_id[0] == 0)) return 0; regu = regulator_get(NULL, led->regulator_id); if (IS_ERR(regu)) { LED_ERR("get regulator %s failed!\n", led->regulator_id); return -1; } led->regulator = regu; return 0; } static int led_regulator_release(struct sunxi_led *led) { if (led->regulator == NULL) return 0; regulator_put(led->regulator); led->regulator = NULL; return 1; } static int sunxi_ledc_dma_get(struct sunxi_led *led) { if (led->dma_chan == NULL) { led->dma_chan = dma_request_chan(led->dev, "tx"); if (IS_ERR(led->dma_chan)) { LED_ERR("failed to get the DMA channel!\n"); return -EFAULT; } } return 0; } static int sunxi_set_led_brightness(struct led_classdev *led_cdev, enum led_brightness value) { unsigned long flags; u32 r, g, b, shift, old_data, new_data, length; struct sunxi_led_info *pinfo; struct sunxi_led_classdev_group *pcdev_group; struct sunxi_led *led = sunxi_led_global; int err; pinfo = container_of(led_cdev, struct sunxi_led_info, cdev); switch (pinfo->type) { case LED_TYPE_G: pcdev_group = container_of(pinfo, struct sunxi_led_classdev_group, g); g = value; shift = 16; break; case LED_TYPE_R: pcdev_group = container_of(pinfo, struct sunxi_led_classdev_group, r); r = value; shift = 8; break; case LED_TYPE_B: pcdev_group = container_of(pinfo, struct sunxi_led_classdev_group, b); b = value; shift = 0; break; } old_data = led->data[pcdev_group->led_num]; if (((old_data >> shift) & 0xFF) == value) return 0; if (pinfo->type != LED_TYPE_R) r = pcdev_group->r.cdev.brightness; if (pinfo->type != LED_TYPE_G) g = pcdev_group->g.cdev.brightness; if (pinfo->type != LED_TYPE_B) b = pcdev_group->b.cdev.brightness; /* LEDC treats input data as GRB by default */ new_data = (g << 16) | (r << 8) | b; length = pcdev_group->led_num + 1; spin_lock_irqsave(&led->lock, flags); led->data[pcdev_group->led_num] = new_data; led->length = length; spin_unlock_irqrestore(&led->lock, flags); /* prepare for dma xfer, dynamic apply dma channel */ if (led->length > SUNXI_LEDC_FIFO_DEPTH) { err = sunxi_ledc_dma_get(led); if (err) return err; } sunxi_ledc_trans_data(led); if (debug_mask & DEBUG_INFO2) { dprintk(DEBUG_INFO2, "dump reg:\n"); led_dump_reg(led, 0, 0x30); } sunxi_ledc_complete(led); if (debug_mask & DEBUG_INFO1) pr_warn("num = %03u\n", length); return 0; } static int sunxi_register_led_classdev(struct sunxi_led *led) { int i, err; size_t size; struct device *dev = led->dev; struct led_classdev *pcdev_RGB; dprintk(DEBUG_INIT, "led_classdev start\n"); if (!led->led_count) led->led_count = SUNXI_DEFAULT_LED_COUNT; size = sizeof(struct sunxi_led_classdev_group) * led->led_count; led->pcdev_group = devm_kzalloc(dev, size, GFP_KERNEL); if (!led->pcdev_group) return -ENOMEM; for (i = 0; i < led->led_count; i++) { led->pcdev_group[i].r.type = LED_TYPE_R; pcdev_RGB = &led->pcdev_group[i].r.cdev; pcdev_RGB->name = devm_kzalloc(dev, 16, GFP_KERNEL); if (!pcdev_RGB->name) return -ENOMEM; sprintf((char *)pcdev_RGB->name, "sunxi_led%dr", i); pcdev_RGB->brightness = LED_OFF; pcdev_RGB->brightness_set_blocking = sunxi_set_led_brightness; pcdev_RGB->dev = dev; err = led_classdev_register(dev, pcdev_RGB); if (err < 0) { LED_ERR("led_classdev_register %s failed!\n", pcdev_RGB->name); return err; } led->pcdev_group[i].g.type = LED_TYPE_G; pcdev_RGB = &led->pcdev_group[i].g.cdev; pcdev_RGB->name = devm_kzalloc(dev, 16, GFP_KERNEL); if (!pcdev_RGB->name) return -ENOMEM; sprintf((char *)pcdev_RGB->name, "sunxi_led%dg", i); pcdev_RGB->brightness = LED_OFF; pcdev_RGB->brightness_set_blocking = sunxi_set_led_brightness; pcdev_RGB->dev = dev; err = led_classdev_register(dev, pcdev_RGB); if (err < 0) { LED_ERR("led_classdev_register %s failed!\n", pcdev_RGB->name); return err; } led->pcdev_group[i].b.type = LED_TYPE_B; pcdev_RGB = &led->pcdev_group[i].b.cdev; pcdev_RGB->name = devm_kzalloc(dev, 16, GFP_KERNEL); if (!pcdev_RGB->name) return -ENOMEM; sprintf((char *)pcdev_RGB->name, "sunxi_led%db", i); pcdev_RGB->brightness = LED_OFF; pcdev_RGB->brightness_set_blocking = sunxi_set_led_brightness; pcdev_RGB->dev = dev; err = led_classdev_register(dev, pcdev_RGB); if (err < 0) { LED_ERR("led_classdev_register %s failed!\n", pcdev_RGB->name); return err; } led->pcdev_group[i].led_num = i; } size = sizeof(u32) * led->led_count; led->data = devm_kzalloc(dev, size, GFP_KERNEL); if (!led->data) return -ENOMEM; return 0; } static void sunxi_unregister_led_classdev(struct sunxi_led *led) { int i; for (i = 0; i < led->led_count; i++) { kfree(led->pcdev_group[i].b.cdev.name); led->pcdev_group[i].b.cdev.name = NULL; kfree(led->pcdev_group[i].g.cdev.name); led->pcdev_group[i].g.cdev.name = NULL; kfree(led->pcdev_group[i].r.cdev.name); led->pcdev_group[i].r.cdev.name = NULL; led_classdev_unregister(&led->pcdev_group[i].b.cdev); led_classdev_unregister(&led->pcdev_group[i].g.cdev); led_classdev_unregister(&led->pcdev_group[i].r.cdev); } kfree(led->data); led->data = NULL; kfree(led->pcdev_group); led->pcdev_group = NULL; } static inline int sunxi_get_u32_of_property(const char *propname, int *val) { int err; struct sunxi_led *led = sunxi_led_global; struct device *dev = led->dev; struct device_node *np = dev->of_node; err = of_property_read_u32(np, propname, val); if (err < 0) LED_ERR("failed to get the value of propname %s!\n", propname); return err; } static inline int sunxi_get_str_of_property(const char *propname, const char **out_string) { int err; struct sunxi_led *led = sunxi_led_global; struct device *dev = led->dev; struct device_node *np = dev->of_node; err = of_property_read_string(np, propname, out_string); if (err < 0) LED_ERR("failed to get the string of propname %s!\n", propname); return err; } static void sunxi_get_para_of_property(struct sunxi_led *led) { int err; u32 val; const char *str; err = sunxi_get_u32_of_property("led_count", &val); if (!err) led->led_count = val; memcpy(led->output_mode.str, "GRB", 3); led->output_mode.val = SUNXI_OUTPUT_GRB; err = sunxi_get_str_of_property("output_mode", &str); if (!err) if (!strncmp(str, "BRG", 3) || !strncmp(str, "GBR", 3) || !strncmp(str, "RGB", 3) || !strncmp(str, "RBG", 3) || !strncmp(str, "BGR", 3)) memcpy(led->output_mode.str, str, 3); err = sunxi_get_str_of_property("led_regulator", &str); if (!err) { if (strlen(str) >= sizeof(led->regulator_id)) LED_ERR("illegal regulator id\n"); else { strcpy(led->regulator_id, str); pr_info("led_regulator: %s\n", led->regulator_id); } } err = sunxi_get_u32_of_property("reset_ns", &val); if (!err) led->reset_ns = val; err = sunxi_get_u32_of_property("t1h_ns", &val); if (!err) led->t1h_ns = val; err = sunxi_get_u32_of_property("t1l_ns", &val); if (!err) led->t1l_ns = val; err = sunxi_get_u32_of_property("t0h_ns", &val); if (!err) led->t0h_ns = val; err = sunxi_get_u32_of_property("t0l_ns", &val); if (!err) led->t0l_ns = val; err = sunxi_get_u32_of_property("wait_time0_ns", &val); if (!err) led->wait_time0_ns = val; err = sunxi_get_u32_of_property("wait_time1_ns", &val); if (!err) led->wait_time1_ns = val; err = sunxi_get_u32_of_property("wait_data_time_ns", &val); if (!err) led->wait_data_time_ns = val; } static void sunxi_led_set_all(struct sunxi_led *led, u8 channel, enum led_brightness value) { u32 i; struct led_classdev *led_cdev; if (channel%3 == 0) { for (i = 0; i < led->led_count; i++) { led_cdev = &led->pcdev_group[i].r.cdev; mutex_lock(&led_cdev->led_access); sunxi_set_led_brightness(led_cdev, value); mutex_unlock(&led_cdev->led_access); } } else if (channel%3 == 1) { for (i = 0; i < led->led_count; i++) { led_cdev = &led->pcdev_group[i].g.cdev; mutex_lock(&led_cdev->led_access); sunxi_set_led_brightness(led_cdev, value); mutex_unlock(&led_cdev->led_access); } } else { for (i = 0; i < led->led_count; i++) { led_cdev = &led->pcdev_group[i].b.cdev; mutex_lock(&led_cdev->led_access); sunxi_set_led_brightness(led_cdev, value); mutex_unlock(&led_cdev->led_access); } } } static ssize_t led_show(struct class *class, struct class_attribute *attr, char *buf) { struct sunxi_led *led = sunxi_led_global; sunxi_led_set_all(led, 0, 0); sunxi_led_set_all(led, 1, 0); sunxi_led_set_all(led, 2, 0); sunxi_led_set_all(led, 0, 20); msleep(500); sunxi_led_set_all(led, 1, 20); msleep(500); sunxi_led_set_all(led, 2, 20); msleep(500); sunxi_led_set_all(led, 0, 0); sunxi_led_set_all(led, 1, 0); sunxi_led_set_all(led, 2, 0); return 0; } static struct class_attribute led_class_attrs[] = { __ATTR(light, 0644, led_show, NULL), //__ATTR_NULL, }; static void led_node_init(void) { int i; int err; /* sys/class/led/xxx */ for (i = 0; i < ARRAY_SIZE(led_class_attrs); i++) { err = class_create_file(led_class, &led_class_attrs[i]); if (err) { LED_ERR("class_create_file() failed!\n"); while (i--) class_remove_file(led_class, &led_class_attrs[i]); class_destroy(led_class); led_class = NULL; } } } static int sunxi_led_probe(struct platform_device *pdev) { int err; struct sunxi_led *led; struct device *dev = &pdev->dev; struct resource *mem_res = NULL; int ret; dprintk(DEBUG_INIT, "start\n"); led = devm_kzalloc(dev, sizeof(struct sunxi_led), GFP_KERNEL); if (!led) return -ENOMEM; sunxi_led_global = led; platform_set_drvdata(pdev, led); led->dev = dev; mem_res = platform_get_resource(pdev, IORESOURCE_MEM, 0); if (mem_res == NULL) { LED_ERR("failed to get MEM res\n"); ret = -ENXIO; goto emem; } if (!request_mem_region(mem_res->start, resource_size(mem_res), mem_res->name)) { LED_ERR("failed to request mem region\n"); ret = -EINVAL; goto emem; } led->iomem_reg_base = ioremap(mem_res->start, resource_size(mem_res)); if (!led->iomem_reg_base) { ret = -EIO; goto eiomap; } led->res = mem_res; led->output_mode.str = devm_kzalloc(dev, 3, GFP_KERNEL); if (!led->output_mode.str) { ret = -ENOMEM; goto ezalloc_str; } sunxi_get_para_of_property(led); err = led_regulator_request(led); if (err < 0) { LED_ERR("request regulator failed!\n"); ret = err; goto eregulator; } err = sunxi_register_led_classdev(led); if (err) { LED_ERR("failed to register led classdev\n"); ret = err; goto eclassdev; } sunxi_ledc_set_time(led); led->reset = devm_reset_control_get(&pdev->dev, NULL); if (IS_ERR(led->reset)) { LED_ERR("get reset clk error\n"); return -EINVAL; } ret = reset_control_deassert(led->reset); if (ret) { LED_ERR("deassert clk error, ret:%d\n", ret); return ret; } sunxi_clk_init(led); init_waitqueue_head(&led->wait); err = sunxi_ledc_irq_init(led); if (err) { LED_ERR("failed to init irq\n"); ret = err; goto eirq; } sunxi_ledc_pinctrl_init(led); #ifdef CONFIG_DEBUG_FS sunxi_led_create_debugfs(led); #endif /* CONFIG_DEBUG_FS */ led_class = class_create(THIS_MODULE, "led"); if (IS_ERR(led_class)) { LED_ERR("class_register err\n"); class_destroy(led_class); ret = -EFAULT; goto eclass; } led_node_init(); dprintk(DEBUG_INIT, "finish\n"); return 0; eclass: #ifdef CONFIG_DEBUG_FS sunxi_led_remove_debugfs(led); #endif /* CONFIG_DEBUG_FS */ sunxi_ledc_irq_deinit(led); eirq: sunxi_unregister_led_classdev(led); sunxi_clk_deinit(led); eclassdev: led_regulator_release(led); eregulator: kfree(led->output_mode.str); ezalloc_str: iounmap(led->iomem_reg_base); led->iomem_reg_base = NULL; eiomap: release_mem_region(mem_res->start, resource_size(mem_res)); emem: kfree(led); return ret; } static int sunxi_led_remove(struct platform_device *pdev) { struct sunxi_led *led = platform_get_drvdata(pdev); class_destroy(led_class); #ifdef CONFIG_DEBUG_FS sunxi_led_remove_debugfs(led); #endif /* CONFIG_DEBUG_FS */ if (led->dma_chan) { dmaengine_terminate_all(led->dma_chan); dma_release_channel(led->dma_chan); led->dma_chan = NULL; } sunxi_ledc_irq_deinit(led); sunxi_unregister_led_classdev(led); sunxi_clk_deinit(led); led_regulator_release(led); kfree(led->output_mode.str); led->output_mode.str = NULL; iounmap(led->iomem_reg_base); led->iomem_reg_base = NULL; release_mem_region(led->res->start, resource_size(led->res)); kfree(led); led = NULL; dprintk(DEBUG_INIT, "finish\n"); return 0; } #if IS_ENABLED(CONFIG_PM) static inline void sunxi_led_save_regs(struct sunxi_led *led) { int i; for (i = 0; i < ARRAY_SIZE(sunxi_led_regs_offset); i++) led->regs_backup[i] = readl(led->iomem_reg_base + sunxi_led_regs_offset[i]); } static inline void sunxi_led_restore_regs(struct sunxi_led *led) { int i; for (i = 0; i < ARRAY_SIZE(sunxi_led_regs_offset); i++) writel(led->regs_backup[i], led->iomem_reg_base + sunxi_led_regs_offset[i]); } static void sunxi_led_enable_irq(struct sunxi_led *led) { enable_irq(led->irqnum); } static void sunxi_led_disable_irq(struct sunxi_led *led) { disable_irq_nosync(led->irqnum); } static int sunxi_led_gpio_state_select(struct sunxi_led *led, char *name) { int err; struct pinctrl_state *pctrl_state; pctrl_state = pinctrl_lookup_state(led->pctrl, name); if (IS_ERR(pctrl_state)) { dev_err(led->dev, "pinctrl_lookup_state(%s) failed! return %p\n", name, pctrl_state); return PTR_ERR(pctrl_state); } err = pinctrl_select_state(led->pctrl, pctrl_state); if (err < 0) { dev_err(led->dev, "pinctrl_select_state(%s) failed! return %d\n", name, err); return err; } return 0; } static void sunxi_led_enable_clk(struct sunxi_led *led) { clk_prepare_enable(led->clk_ledc); clk_prepare_enable(led->clk_cpuapb); } static void sunxi_led_disable_clk(struct sunxi_led *led) { clk_disable_unprepare(led->clk_cpuapb); clk_disable_unprepare(led->clk_ledc); } static int sunxi_led_power_on(struct sunxi_led *led) { int err; if (led->regulator == NULL) return 0; err = regulator_enable(led->regulator); if (err) { dev_err(led->dev, "enable regulator %s failed!\n", led->regulator_id); return err; } return 0; } static int sunxi_led_power_off(struct sunxi_led *led) { int err; if (led->regulator == NULL) return 0; err = regulator_disable(led->regulator); if (err) { dev_err(led->dev, "disable regulator %s failed!\n", led->regulator_id); return err; } return 0; } static int sunxi_led_suspend(struct device *dev) { struct platform_device *pdev = to_platform_device(dev); struct sunxi_led *led = platform_get_drvdata(pdev); dev_dbg(led->dev, "[%s] enter standby\n", __func__); sunxi_led_disable_irq(led); sunxi_led_save_regs(led); sunxi_led_gpio_state_select(led, PINCTRL_STATE_SLEEP); sunxi_led_disable_clk(led); reset_control_assert(led->reset); sunxi_led_power_off(led); return 0; } static int sunxi_led_resume(struct device *dev) { struct platform_device *pdev = to_platform_device(dev); struct sunxi_led *led = platform_get_drvdata(pdev); dev_dbg(led->dev, "[%s] return from standby\n", __func__); sunxi_led_power_on(led); reset_control_deassert(led->reset); sunxi_led_enable_clk(led); sunxi_led_gpio_state_select(led, PINCTRL_STATE_DEFAULT); sunxi_led_restore_regs(led); sunxi_led_enable_irq(led); return 0; } static const struct dev_pm_ops sunxi_led_pm_ops = { .suspend = sunxi_led_suspend, .resume = sunxi_led_resume, }; #define SUNXI_LED_PM_OPS (&sunxi_led_pm_ops) #endif static const struct of_device_id sunxi_led_dt_ids[] = { {.compatible = "allwinner,sunxi-leds"}, {}, }; static struct platform_driver sunxi_led_driver = { .probe = sunxi_led_probe, .remove = sunxi_led_remove, .driver = { .name = "sunxi-leds", .owner = THIS_MODULE, #if IS_ENABLED(CONFIG_PM) .pm = SUNXI_LED_PM_OPS, #endif .of_match_table = sunxi_led_dt_ids, }, }; module_platform_driver(sunxi_led_driver); module_param_named(debug, debug_mask, int, 0664); MODULE_ALIAS("sunxi leds dirver"); MODULE_ALIAS("platform : leds dirver"); MODULE_LICENSE("GPL v2"); MODULE_VERSION("1.2.3"); MODULE_AUTHOR("Albert Yu <yuxyun@allwinnertech.com>"); MODULE_AUTHOR("liuyu <SWCliuyus@allwinnertech.com>"); MODULE_DESCRIPTION("Allwinner ledc-controller driver");请更新
leds-sunxi.c修复了 LEDC DMA相关功能 -
回复: D1s ledc驱动代码bug,DMA模式无法使用发布在 MR Series
@leomini5 我这边没有D1s的板卡,在T113上测试通过,测试1024颗灯,这个可能是RV才有的bug?
-
回复: 请教如何排查 linux kernel 启动卡主的问题发布在 Linux
@xsyr1024 在 请教如何排查 linux kernel 启动卡主的问题 中说:
[ 0.969253] 000: printk: console [ttyS0] enabled
[ 0.973945] 000: printk: bootconsole [earlycon0] disabled看着是earlycon0作为串口输出驱动正常,但是切换到ttyS0作为串口输出的时候ttyS0没有输出,先检查uart部分
另外这个是LinuxRT内核吗
-
回复: T113基于Longan在LVGL中如何播放视屏,通过tplayer发布在 GUI
static lv_style_t style_scr_act; if (style_scr_act.prop_cnt == 0) { lv_style_init(&style_scr_act); lv_style_set_bg_opa(&style_scr_act, LV_OPA_COVER); lv_obj_add_style(lv_scr_act(), &style_scr_act, 0); } lv_disp_get_default()->driver->screen_transp = 1; lv_disp_set_bg_opa(lv_disp_get_default(), LV_OPA_TRANSP); /* Empty the buffer, not emptying will cause the UI to be opaque */ lv_memset_00(lv_disp_get_default()->driver->draw_buf->buf_act, lv_disp_get_default()->driver->draw_buf->size * sizeof(lv_color32_t)); lv_style_set_bg_opa(&style_scr_act, LV_OPA_TRANSP); lv_obj_report_style_change(&style_scr_act);设置透明层
-
回复: 打包工具小细节发布在 编译和烧写问题专区
有full_img和programmer_img 转换工具,具体参考《Linux_MMC_NOR离线烧录_开发指南.pdf》《Linux_SLCNAND_UBI离线烧录_开发指南.pdf》
-
回复: Tina-T113 openWrt 新增软件包,选中menuconfig后,编译报错,makefile完全就是按照sdk里QT对应的makefile来写的发布在 MR Series
Makefile:68: *** missing separator. Stop.
这个错误通常表示在 Makefile 的第 68 行或附近存在语法错误。Makefile 中使用的规则必须遵循严格的缩进规范,通常是使用 Tab 键进行缩进,而不是空格。
请检查 Makefile 第 68 行附近的代码,确保每个规则的命令部分都以 Tab 键开头,并且规则名称和命令之间使用冒号(:)分隔。此外,还需要确认 Makefile 的每一行都是使用相同的缩进方式,要么都是 Tab,要么都是空格,不要混用。
-
回复: 全志提供的交叉编译环境头文件的问题发布在 Linux
obj-m := hello.o KERNEL := ../lichee/linux-5.4/ PWD := $(shell pwd) modules : $(MAKE) -C $(KERNEL) M=$(PWD) modules .PHONEY:clean clean : rm -f *.o *.ko这是一个基本的内核模块Makefile。下面是各个变量和命令的含义:
obj-m := hello.o定义要编译的内核模块的目标文件名为
hello.o。这里使用了obj-m变量,它是一个特殊的变量,用于编译内核模块。KERNEL := ../lichee/linux-5.4/定义内核源代码目录的位置,这里是
../lichee/linux-5.4/。根据实际情况修改该路径。PWD := $(shell pwd)定义当前目录的路径为
PWD。这里使用了shell命令来获取当前目录的路径。modules : $(MAKE) -C $(KERNEL) M=$(PWD) modules定义一个名为
modules的伪目标,它的依赖关系为空。执行该目标时,会进入内核源代码目录$(KERNEL),并使用M=$(PWD)选项告诉内核Makefile,模块源代码在当前目录中。最后执行modules目标,编译内核模块。.PHONEY:clean clean : rm -f *.o *.ko定义一个伪目标
clean,它的依赖关系为空。执行该目标时,会删除当前目录下的所有.o和.ko文件。如果需要编译多个内核模块,可以将
obj-m变量中的目标文件名替换为多个目标文件名,如obj-m := hello.o world.o another.o。此外,还可以在Makefile中定义其他命令,比如安装、卸载等命令,以更方便地管理内核模块。编译指令如下:
make ARCH=arm CROSS_COMPILE=$(pwd)/../prebuilt/gcc/linux-x86/arm/toolchain-sunxi-glibc/toolchain/bin/arm-openwrt-linux-gnueabi-这是一个编译ARM架构的程序的Makefile命令。下面是各个参数的含义:
ARCH=arm指定目标架构为ARM。
CROSS_COMPILE=$(pwd)/../prebuilt/gcc/linux-x86/arm/toolchain-sunxi-glibc/toolchain/bin/arm-openwrt-linux-gnueabi-指定交叉编译器的路径及前缀。这里使用了
$(pwd)变量获取当前工作目录的路径,并拼接上交叉编译器的路径及前缀。根据实际情况修改该路径。使用交叉编译器可以在x86主机上编译ARM平台的程序。
arm-openwrt-linux-gnueabi-是交叉编译器的前缀,表示编译出来的可执行文件适用于OpenWrt系统。在执行该命令之前,需要确保已经安装了相应的交叉编译工具链,并将其加入环境变量中。如果没有安装,请参考相关文档进行安装。
-
回复: [V851s] YOLOv5 v7.0 转 Acuity 6.6.1 深度解析:从 ONNX 崩溃到依赖地狱,以及三条出路的分析发布在 编译和烧写问题专区
Acuity-Toolkit-Binary-6.6.1 版本已经非常老了,建议更新下版本,社区目前有 Radxa 提供的 NPU 开发环境:https://docs.radxa.com/en/cubie/a5e/app-dev/npu-dev/cubie-acuity-sdk
-
回复: D1-H哪吒开发板HDMI默认可以使用吗发布在 MR Series
默认HDMI不开,需要命令开启
cd /sys/kernel/debug/dispdbg echo disp0 > name; echo switch1 > command; echo 4 10 0 0 0x4 0x101 0 0 0 8 > param; echo 1 > start;